



 Программное обеспечение
Программное обеспечение Строительство
СтроительствоПохожие презентации:




رشته مهندسی فناوری اطالعات
1.
2.
وزارت علوم ،تحقیقات و فناوریدانشگاه شهید مدنی آذربایجان
دانشکده فناوری اطالعات و مهندسی
کامپیوتر
گروه فناوری اطالعات
پایاننامه مقطع کارشناسی ارشد
رشته مهندسی فناوری اطالعات ()M.Sc.
تشخیص سازههای ساخت بشر از منابع طبیعی
در تصاویر هوایی با استفاده از
الگوریتم فرا ابتکاری رقابت استعماری
استاد راهنما:
آقای دکتر ناصر فرج زاده
استاد مشاور:
آقای دکتر مهدی هاشم زاده
پژوهشگر:
زهرا کمانکش
بهمن 1397
3.
مقدمهتصویر هوایی
چیست؟
4.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
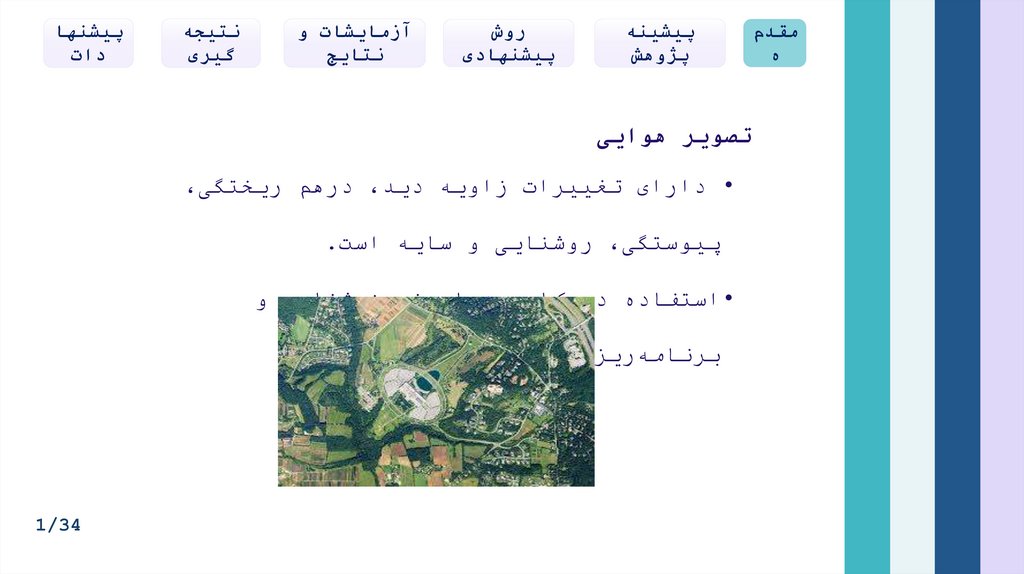
تصویر هوایی
• دارای تغییرات زاویه دید ،درهم ریختگی،
پیوستگی ،روشنایی و سایه است.
• استفاده در کاربردهای زمین شناسی و
برنامهریزی شهری
1/34
5.
2/346.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
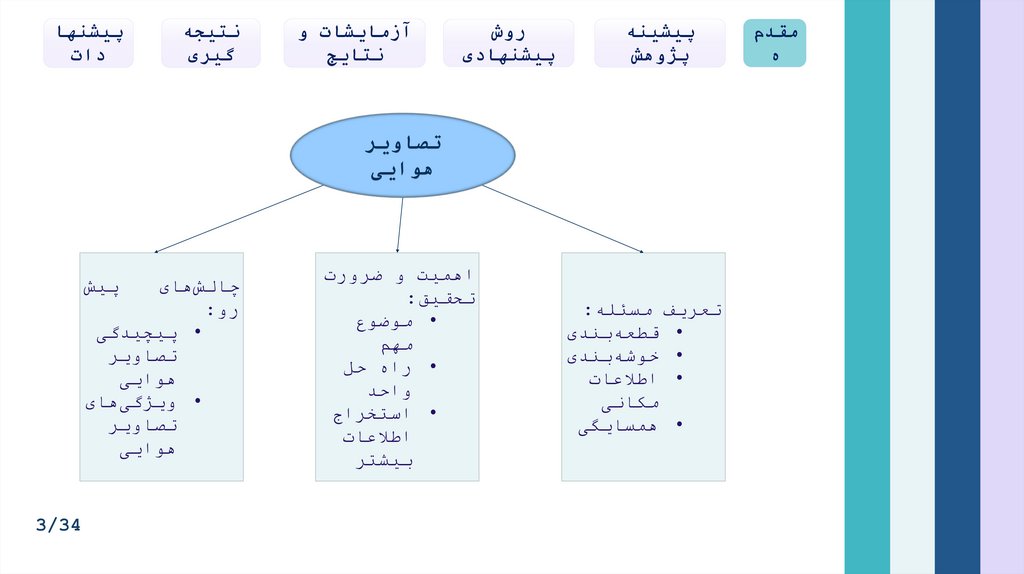
تصاویر
هوایی
تعریف مسئله:
• قطعهبندی
• خوشهبندی
• اطالعات
مکانی
• همسایگی
اهمیت و ضرورت
تحقیق:
• موضوع
مهم
• راه حل
واحد
• استخراج
اطالعات
بیشتر
پیش
چالشهای
رو:
• پیچیدگی
تصاویر
هوایی
• ویژگیهای
تصاویر
هوایی
3/34
7.
مقدمه
پیشینه
پژوهش
•
•
•
•
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
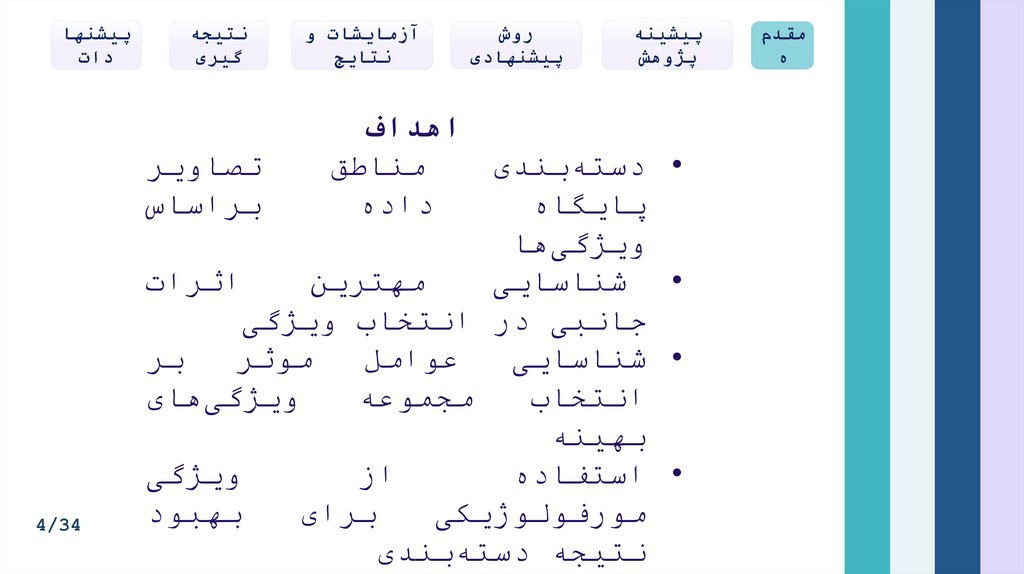
اهداف
تصاویر
مناطق
دستهبندی
براساس
داده
پایگاه
ویژگیها
اثرات
مهترین
شناسایی
جانبی در انتخاب ویژگی
بر
موثر
عوامل
شناسایی
ویژگیهای
مجموعه
انتخاب
بهینه
ویژگی
از
استفاده
بهبود
برای
مورفولوژیکی
نتیجه دستهبندی
پیشنها
دات
4/34
8.
پیشینه پژوهشدستهبندی روش های ارائه شده برای تحلیل تصاویر هوایی
9.
پیشینهپژوهش
مقدم
ه
آزمایشات و
نتایج
روش
پیشنهادی
نتیجه
گیری
پیشنها
دات
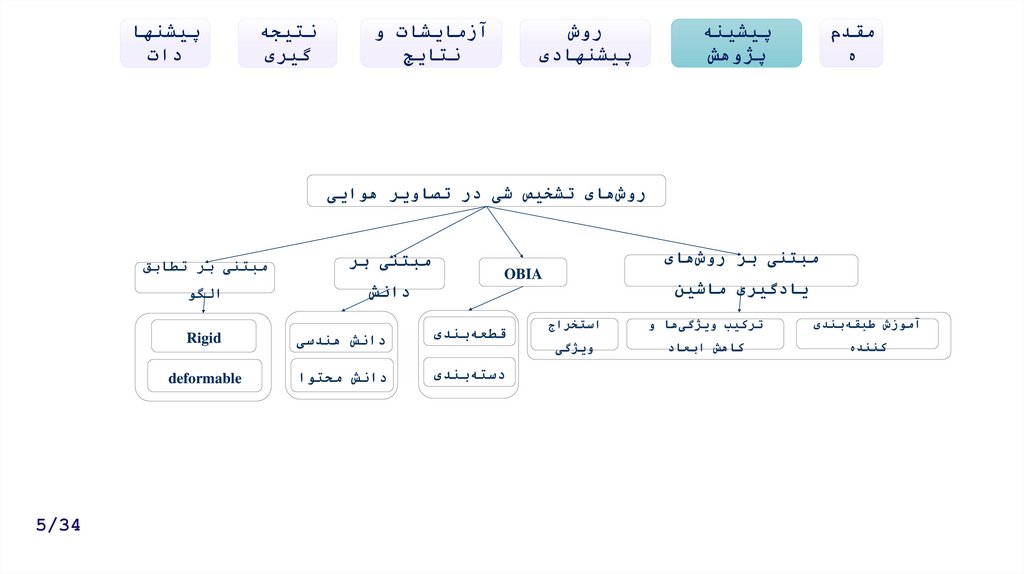
روشهای تشخیص شی در تصاویر هوایی
مبتنی بر روشهای
OBIA
یادگیری ماشین
آموزش طبقهبندی
ترکیب ویژگیها و
استخراج
کننده
کاهش ابعاد
ویژگی
مبتنی بر
مبتنی بر تطابق
دانش
الگو
قطعهبندی
دانش هندسی
Rigid
دستهبندی
دانش محتوا
deformable
5/34
10.
مقدمه
روش
پیشنهادی
پیشینه
پژوهش
نتیجه
گیری
آزمایشات و
نتایج
پیشنها
دات
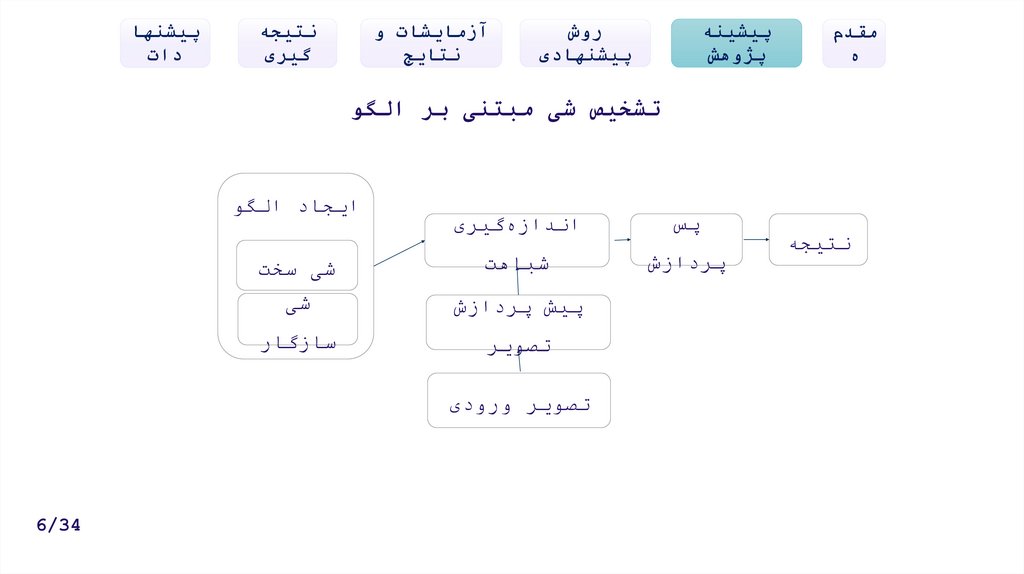
تشخیص شی مبتنی بر الگو
نتیجه
ایجاد الگو
پس
اندازهگیری
پردازش
شباهت
شی سخت
پیش پردازش
شی
تصویر
سازگار
تصویر ورودی
6/34
11.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مزایا و معایب روشهای
مبتنی بر الگو:
oاشیا مورد
بررسیساختمان ،خط ساحلی،
• سخت:
منبع سوخت
• سازگار :هواپیما ،کشتی،
تانک ،ساختمان ،فرودگاه
oمزیت
• سخت :ساده از لحاظ به کارگیری
• سازگار :انعطاف پذیر در مقابل تغییر شکل
oمعایب
•
•
سخت :وابسته به مقیاس،حساس به تغییر شکل و نقطه
دید
سازگار :نیازمند به اطالعات پیشین ،هزینه
محاسباتی باال
7/34
12.
پیشینهپژوهش
مقدم
ه
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
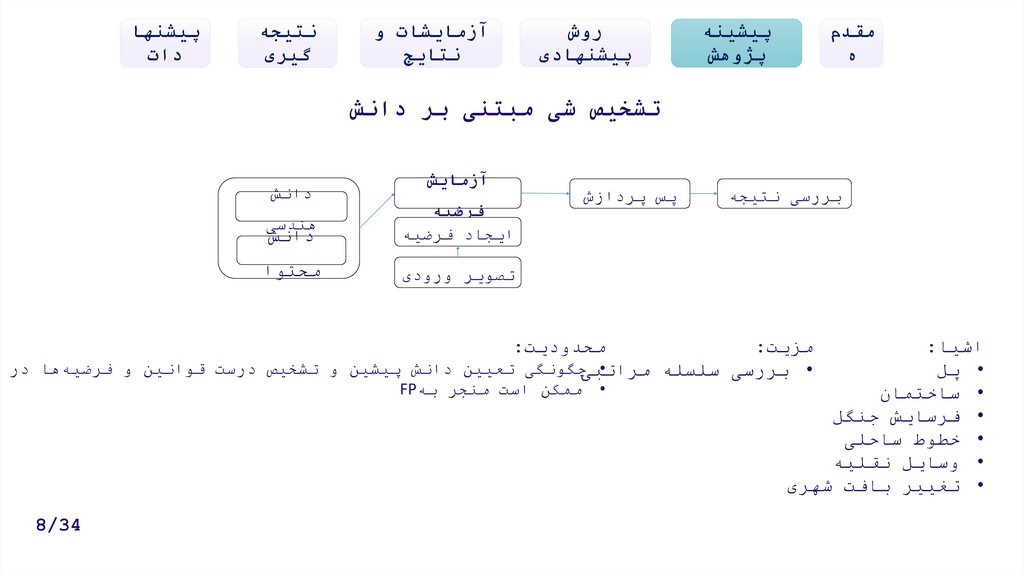
تشخیص شی مبتنی بر دانش
بررسی نتیجه
اشیا:
• پل
• ساختمان
• فرسایش جنگل
• خطوط ساحلی
• وسایل نقلیه
• تغییر بافت شهری
پس پردازش
آزمایش
دانش
فرضیه
ایجاد فرضیه
هندسی
دانش
تصویر ورودی
محتوا
محدودیت:
مزیت:
مراتبیچگونگی تعیین دانش پیشین و تشخیص درست قوانین و فرضیهها در ن
•
• بررسی سلسله
•
ممکن است منجر بهFP
8/34
13.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
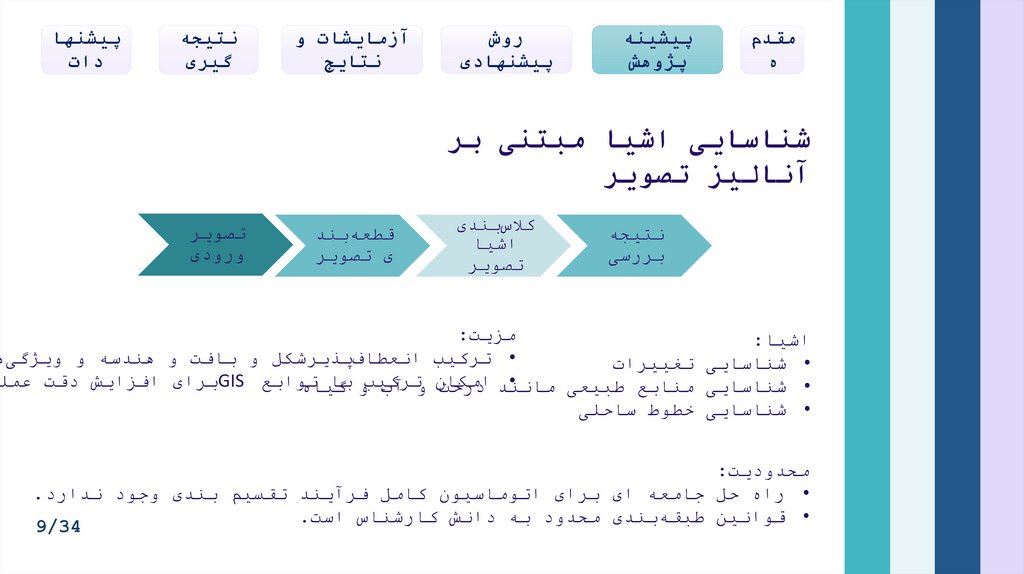
شناسایی اشیا مبتنی بر
آنالیز تصویر
نتیجه
بررسی
کالسبندی
اشیا
تصویر
قطعهبند
ی تصویر
تصویر
ورودی
مزیت:
اشیا:
• ترکیب انعطافپذیرشکل و بافت و هندسه و ویژگیه
• شناسایی تغییرات
توابع GISبرای افزایش دقت عملک
ترکیبو با
•
گیاه
امکان و آب
مانند درخت
• شناسایی منابع طبیعی
• شناسایی خطوط ساحلی
محدودیت:
• راه حل جامعه ای برای اتوماسیون کامل فرآیند تقسیم بندی وجود ندارد.
• قوانین طبقهبندی محدود به دانش کارشناس است.
9/34
14.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
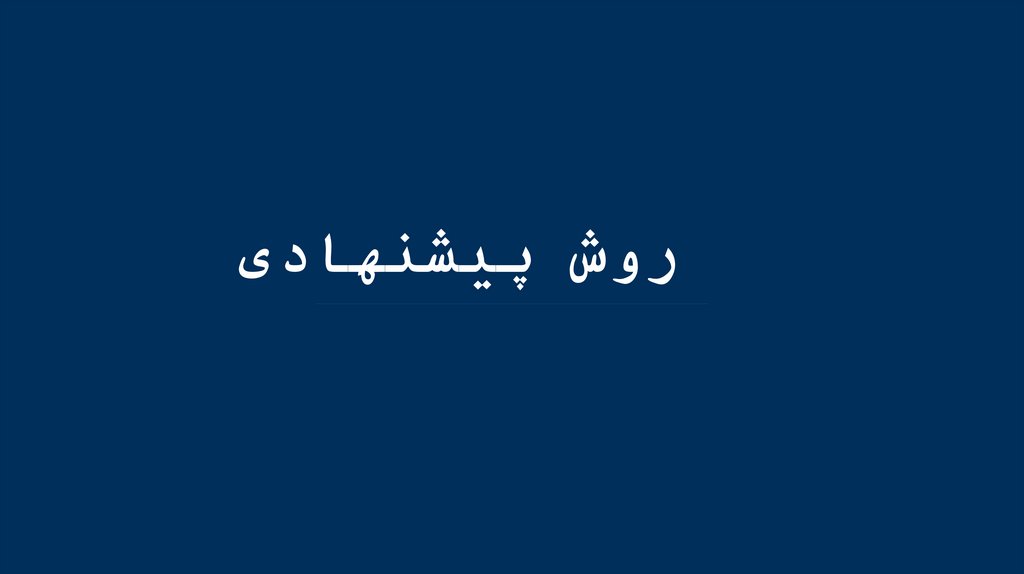
نوآوری روش پیشنهادی:
• استفاده از نواحی همگن تولید شده توسط الگوریتم SLIC
• استفاده از EMPدر ویژگیهای استخراج شده
• استفاده از الگوریتم آدابوست برای دسته بندی
10/3
4
15.
روش پیشنهادی16.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
Title Three
11/3
4
17.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
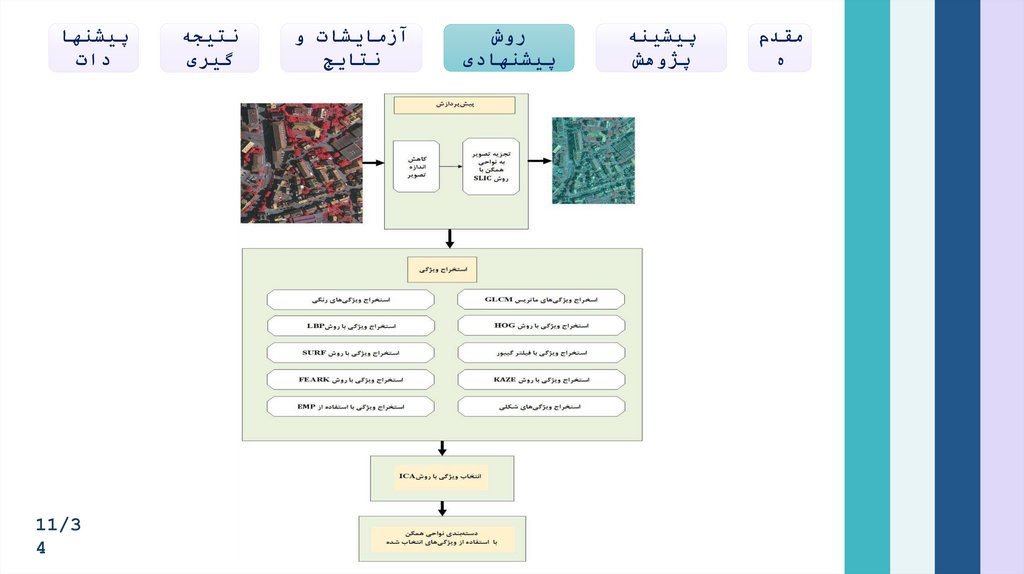
مرحله :1
پیشپردازش با
الگوریتم
SLIC
این
ویژگیهای
الکوریتم:
• سرعت باال
• دقت مناسب در
مرزبندی ها
• کنترل بر روی
تعداد نواحی
• کنترل بر روی
همپوشانی نواحی
همگن
K=12000
K=2000
12/3
4
18.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
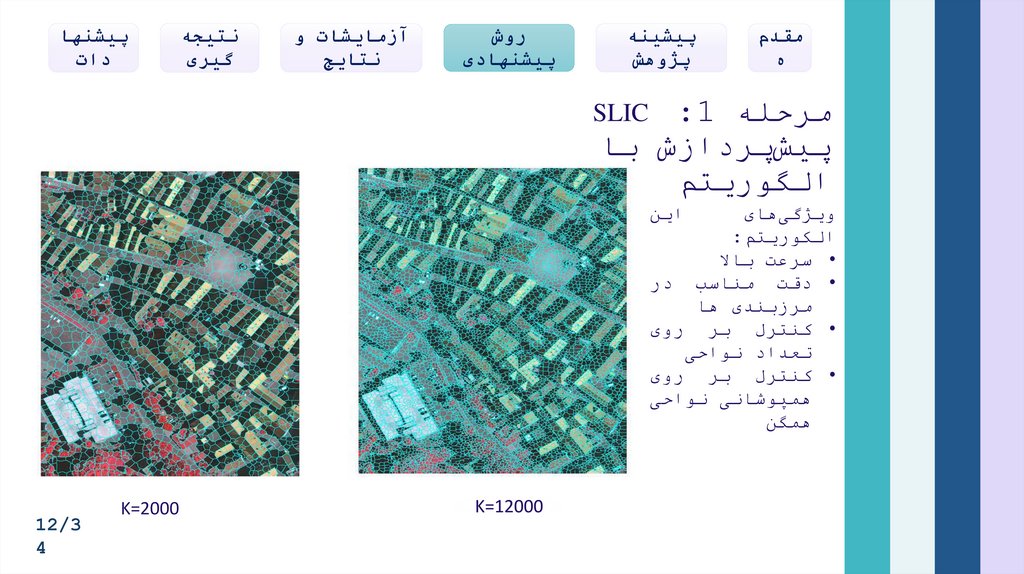
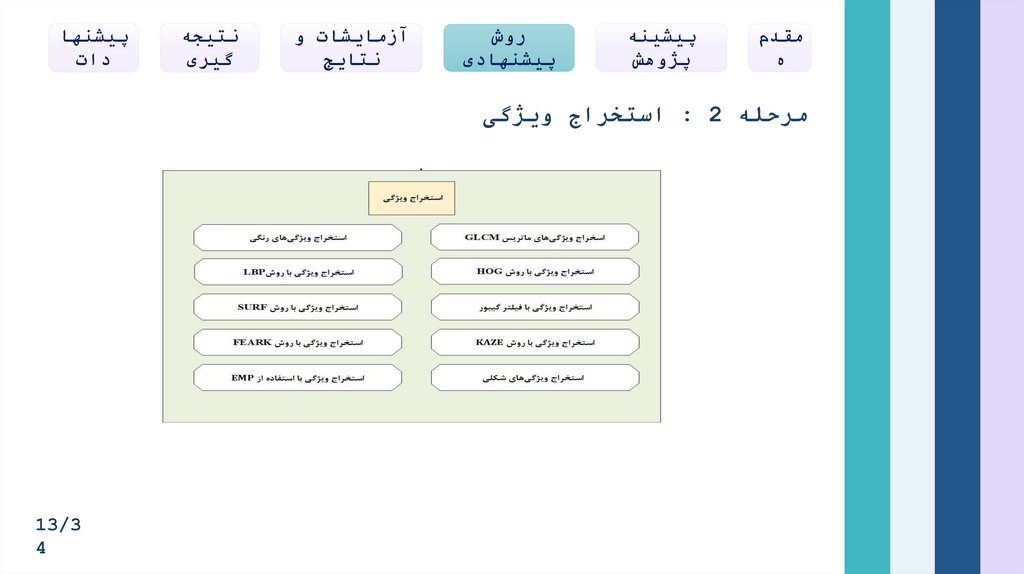
مرحله : 2استخراج ویژگی
13/3
4
19.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مرحله : 2استخراج ویژگی
)1استخراج ویژگی با روش KAZE
• ویژگی ها را به یک فضای غیر خطی منتقل میکند.
• این روش حذف نویز را در طی مراحل انجام میدهد.
)2استخراج ویژگی با روش ویژگیهای هیستوگرام گرادیان جهتدار
• برای استخراج ویژگیها به صورت محلی
)3استخراج ویژگی با روش
SURF
• کمک به دستهبندی میان نواحی همگن
• بر روی هر superpixelاعمال میشود.
)4استخراج ویژگی از
EMP
• استفاده از اطالعات طیفی و مکانی
14/3
4
20.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مرحله : 2استخراج ویژگی
)5استخراج ویژگی با روش LBP
• از قدرتمندترین توصیفگرهای محلی
• تغییرات یکنواخت نواحی خاکستری مقاوم است.
)6استخراج ویژگی با روش FREAK
• یک توصیفگر محلی است.
• مقاوم نسبت به نویز
• مقاوم نسبت به چرخش و مقیاس
15/3
4
21.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مرحله : 2استخراج ویژگی
)7استخراج ویژگی با روش GLCM
)8استخراج ویژگیهای اندازه و جهت مبتنی بر
گابور
)9ویژگیهای رنگی
•
•
•
•
RGB
HSV
LAB
XYZ
)10ویژگی گبور
•
•
خاصیت تفکیکپذیری خوب و چندگانه در حوزه مکان و
فرکانس
در مقیاسها و جهات مختلف به تصویر اعمال میشود.
)11ارتفاع از سطح زمین
16/3
4
22.
پیشینهپژوهش
مقدم
ه
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مرحله : 2استخراج ویژگی
RGB
HSV
LAB
XYZ
17/3
4
23.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
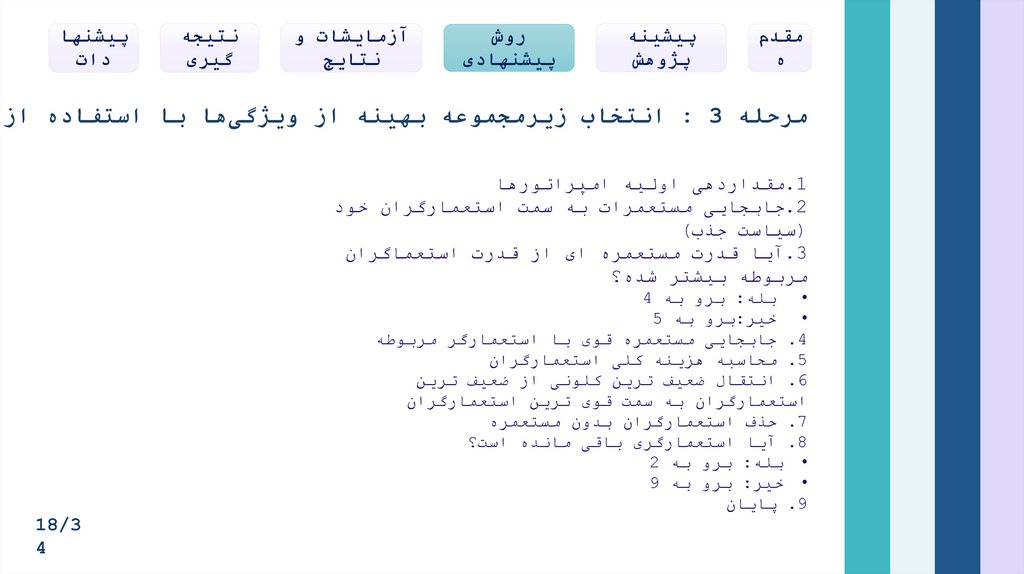
مرحله : 3انتخاب زیرمجموعه بهینه از ویژگیها با استفاده از
.1مقداردهی اولیه امپراتورها
.2جابجایی مستعمرات به سمت استعمارگران خود
(سیاست جذب)
.3آیا قدرت مستعمره ای از قدرت استعماگران
مربوطه بیشتر شده؟
• بله :برو به 4
• خیر:برو به 5
.4جابجایی مستعمره قوی با استعمارگر مربوطه
.5محاسبه هزینه کلی استعمارگران
.6انتقال ضعیف ترین کلونی از ضعیف ترین
استعمارگران به سمت قوی ترین استعمارگران
.7حذف استعمارگران بدون مستعمره
.8آیا استعمارگری باقی مانده است؟
• بله :برو به 2
• خیر :برو به 9
.9پایان
18/3
4
24.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
مرحله : 4دستهبندی با الگوریتم بوستینگ تطبیقی
جبران نقاط ضعف روشهای دستهبندی
مختلف و ترکیب نقاط قوت
هر بار الگوریتم به نفع نمونههای
غلط آموزش داده میشود.
سرعت باال
19/3
4
25.
آزمایشات و نتایج26.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
پایگاه
داده
• 2D Semantic Labeling-Vaihingen
• ISPRS
• 33تصویر
•
•
•
•
•
•
23تصویر آموزش و 10تصویر تست
فرمت tif
نمای باال
تصاویر برچسب معیار
مدل رقومی سطح
حجم تصاویر زیاد
20/3
4
27.
پیشنهادات
نتیجه
گیری
آزمایشات و
نتایج
روش
پیشنهادی
پیشینه
پژوهش
مقدم
ه
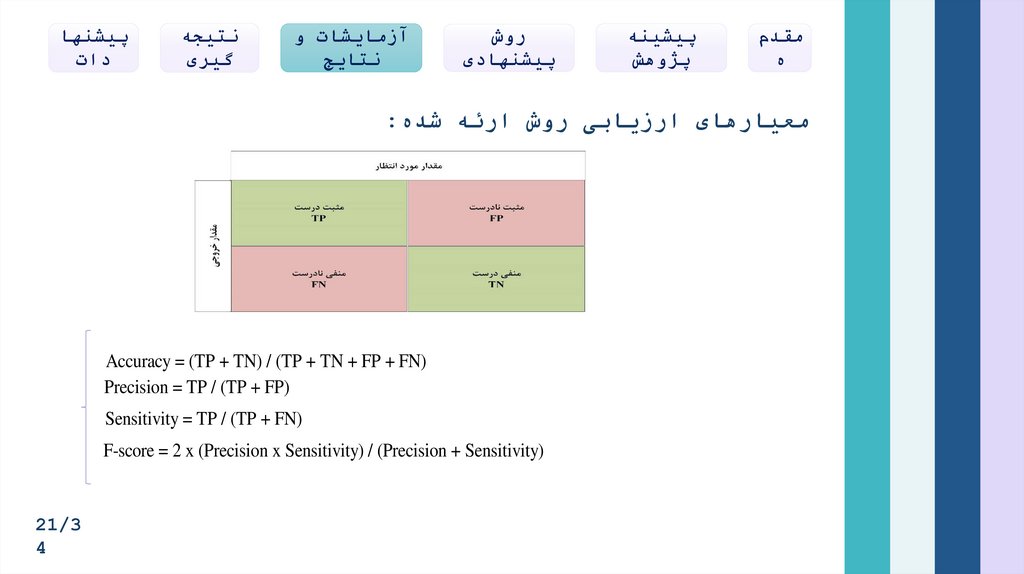
:معیارهای ارزیابی روش ارئه شده
Accuracy = (TP + TN) / (TP + TN + FP + FN)
Precision = TP / (TP + FP)
Sensitivity = TP / (TP + FN)
F-score = 2 x (Precision x Sensitivity) / (Precision + Sensitivity)
21/3
4
28.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
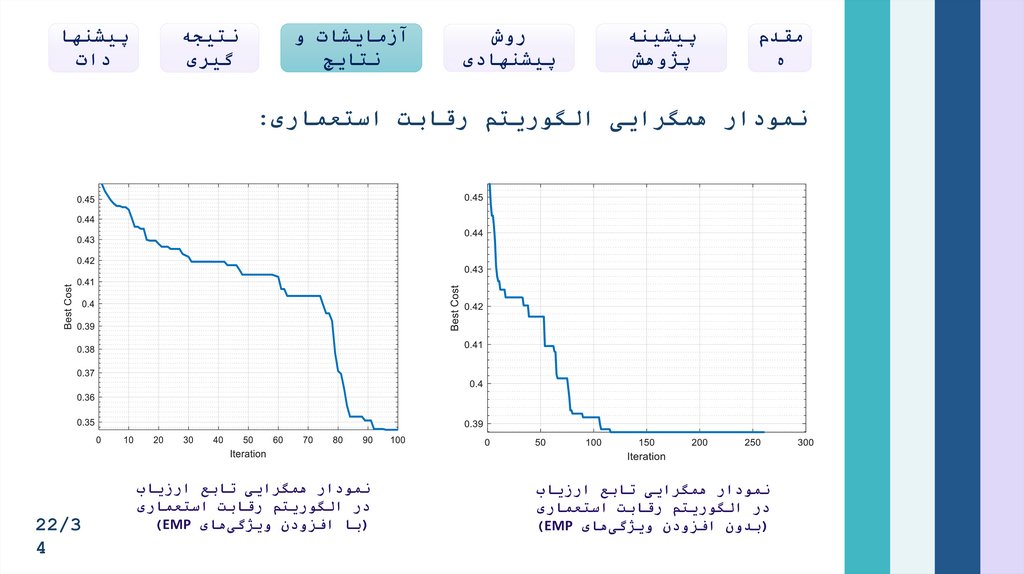
نمودار همگرایی الگوریتم رقابت استعماری:
نمودار همگرایی تابع ارزیاب
در الگوریتم رقابت استعماری
(بدون افزودن ویژگیهای )EMP
نمودار همگرایی تابع ارزیاب
در الگوریتم رقابت استعماری
(با افزودن ویژگیهای )EMP
22/3
4
29.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
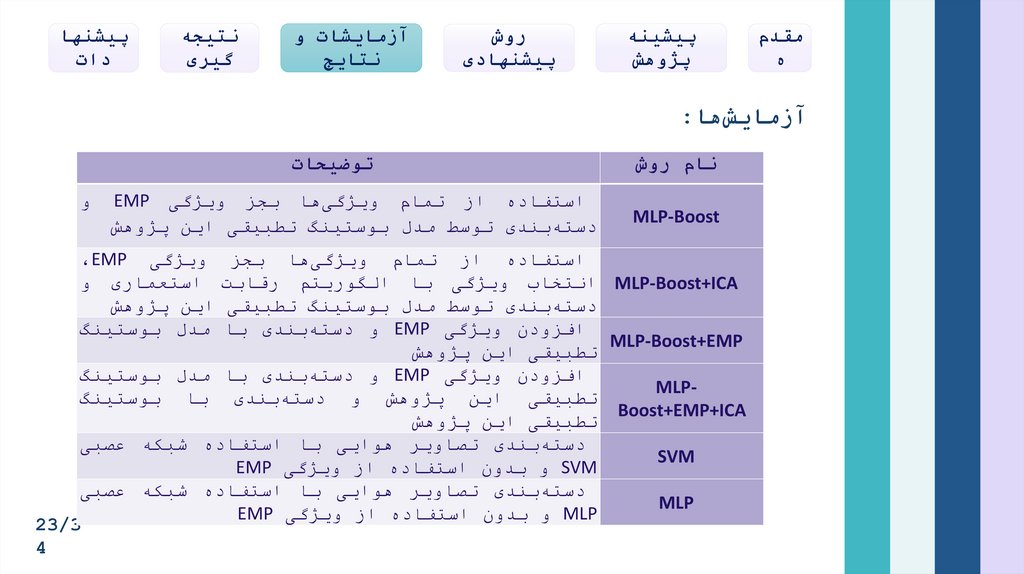
آزمایشها:
نام روش
MLP-Boost
توضیحات
استفاده از تمام ویژگیها بجز ویژگی EMP
دستهبندی توسط مدل بوستینگ تطبیقی این پژوهش
و
ویژگی ،EMP
استعماری و
این پژوهش
مدل بوستینگ
استفاده از تمام ویژگیها بجز
MLP-Boost+ICAانتخاب ویژگی با الگوریتم رقابت
دستهبندی توسط مدل بوستینگ تطبیقی
افزودن ویژگی EMPو دستهبندی با
MLP-Boost+EMP
تطبیقی این پژوهش
افزودن ویژگی EMPو دستهبندی با مدل بوستینگ
MLPتطبیقی این پژوهش و دستهبندی با بوستینگ
Boost+EMP+ICA
تطبیقی این پژوهش
دستهبندی تصاویر هوایی با استفاده شبکه عصبی
SVM
SVMو بدون استفاده از ویژگی EMP
دستهبندی تصاویر هوایی با استفاده شبکه عصبی
MLP
MLPو بدون استفاده از ویژگی EMP
23/3
4
30.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
تعداد نواحی همگن در
آزمایشها:
• 1/50تعداد پیکسلهای
تصویر
• 1/12تعداد پیکسلهای
تصویر
• 1/7تعداد پیکسلهای
تصویر
• تمام پیکسلهای تصویر
24/3
4
31.
مقدمه
پیشینه
پژوهش
آزمایشات و
نتایج
روش
پیشنهادی
نتیجه
گیری
پیشنها
دات
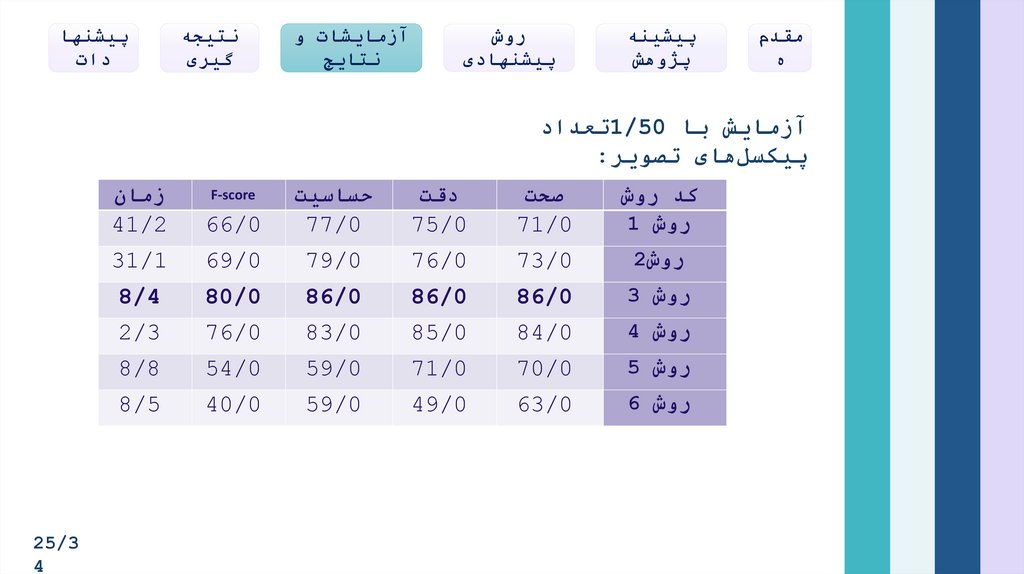
آزمایش با 1/50تعداد
پیکسلهای تصویر:
کد روش
روش 1
صحت
دقت
حساسیت
F-score
زمان
71/0
75/0
77/0
66/0
41/2
روش2
73/0
76/0
79/0
69/0
31/1
روش 3
86/0
86/0
86/0
80/0
8/4
روش 4
84/0
85/0
83/0
76/0
2/3
روش 5
70/0
71/0
59/0
54/0
8/8
روش 6
63/0
49/0
59/0
40/0
8/5
25/3
4
32.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
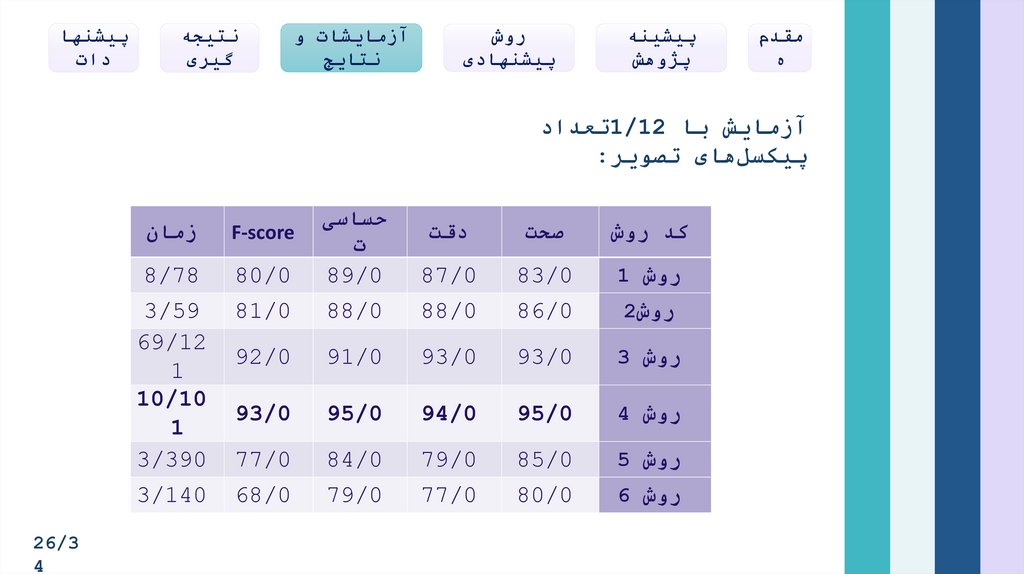
آزمایش با 1/12تعداد
پیکسلهای تصویر:
حساسی
ت
F-score
زمان
روش 1
83/0
87/0
89/0
80/0
8/78
روش2
86/0
88/0
88/0
81/0
روش 3
93/0
93/0
91/0
92/0
روش 4
95/0
94/0
95/0
93/0
روش 5
85/0
79/0
84/0
77/0
3/59
69/12
1
10/10
1
3/390
روش 6
80/0
77/0
79/0
68/0
3/140
کد روش
صحت
دقت
26/3
4
33.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
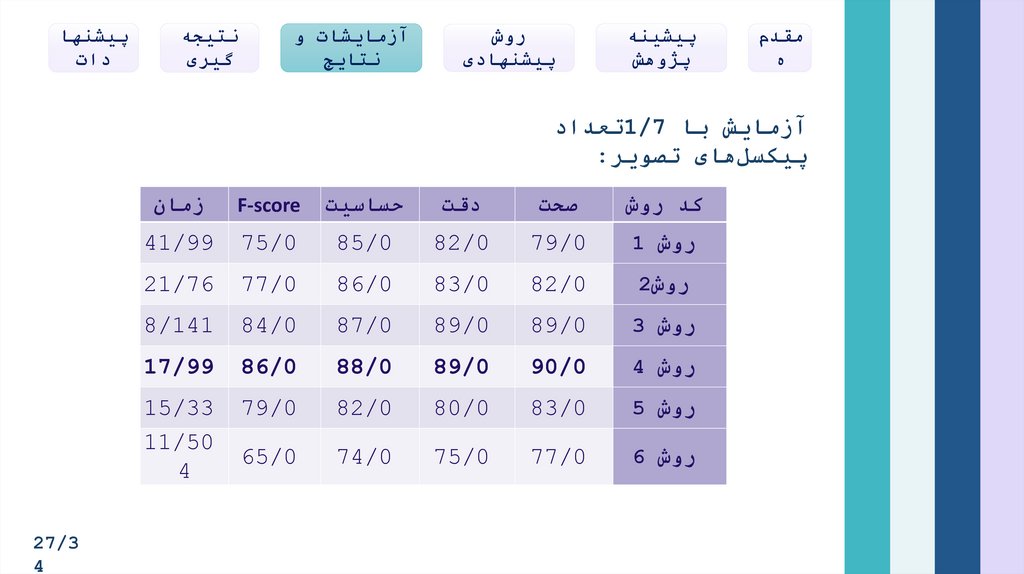
آزمایش با 1/7تعداد
پیکسلهای تصویر:
کد روش
صحت
دقت
حساسیت
F-score
زمان
روش 1
79/0
82/0
85/0
75/0
41/99
روش2
82/0
83/0
86/0
77/0
21/76
روش 3
89/0
89/0
87/0
84/0
8/141
روش 4
90/0
89/0
88/0
86/0
17/99
روش 5
83/0
80/0
82/0
79/0
روش 6
77/0
75/0
74/0
65/0
15/33
11/50
4
27/3
4
34.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
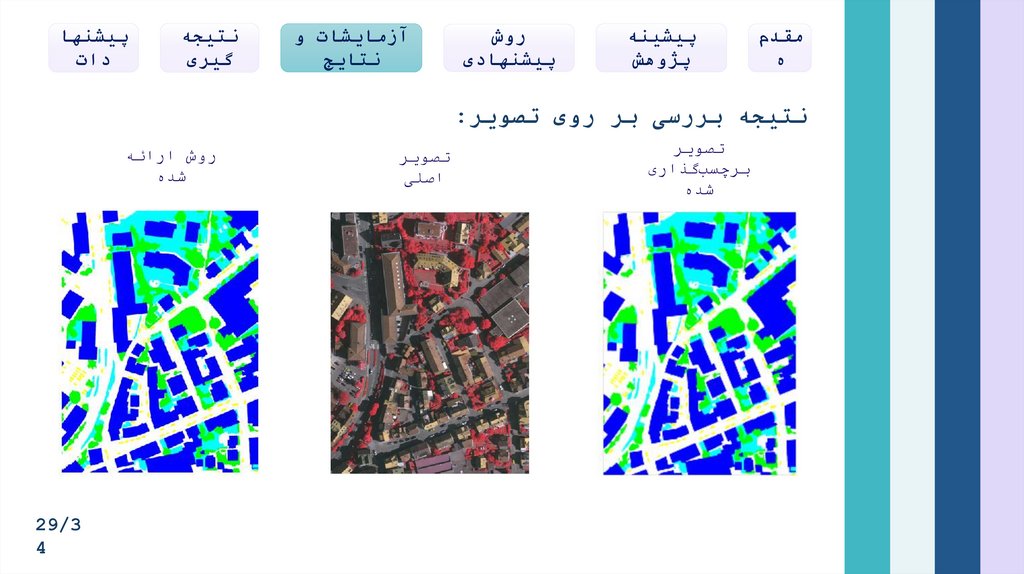
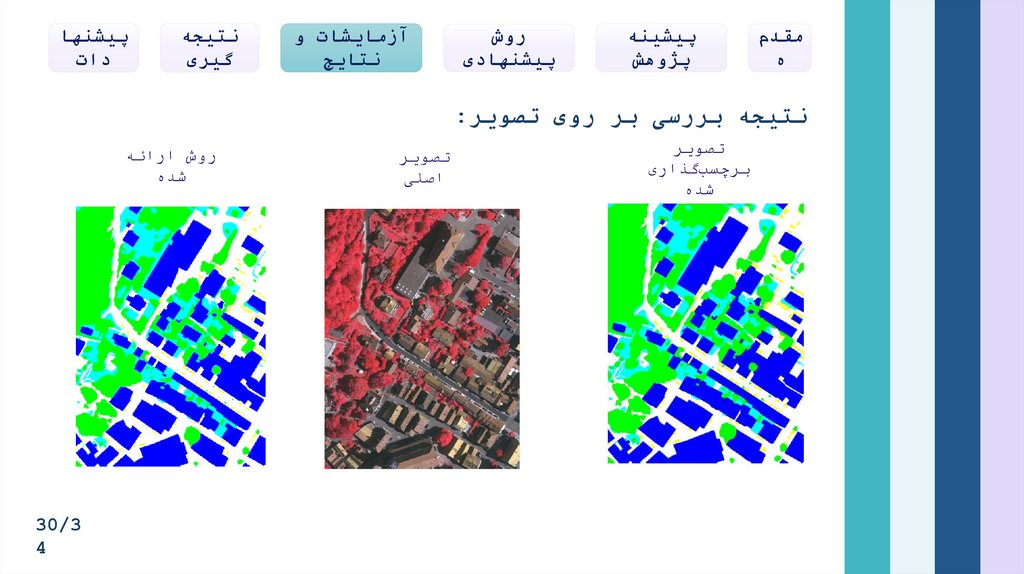
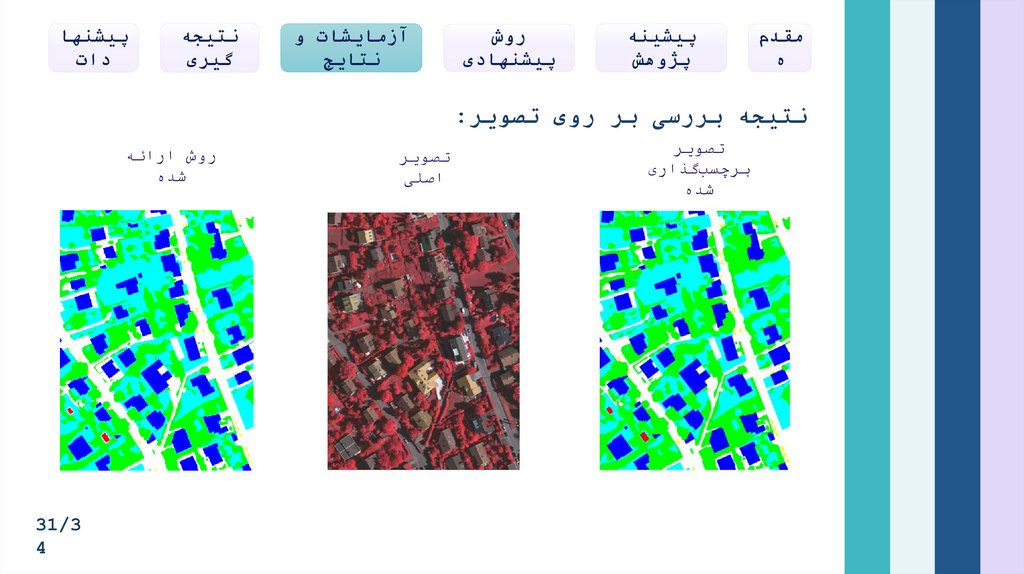
نحوه کدگذاری هر یک از عوارض سطح زمین:
• سطوح غیرقابل نفوذ دارای کد رنگی ""255,255,255
در فضای رنگی RGB
• ساختمان دارای کد رنگی " "0,0,255در فضای رنگی
RGB
• پوشش گیاهی کم دارای کد رنگی " "0,255,255در
فضای رنگی RGB
• درخت دارای کد رنگی " "0,255,0در فضای رنگی RGB
• اتومبیل دارای کد رنگی " "255,255,0در فضای
رنگی RGB
28/3
4
35.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
نتیجه بررسی بر روی تصویر:
تصویر
برچسبگذاری
شده
تصویر
اصلی
روش ارائه
شده
29/3
4
36.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
نتیجه بررسی بر روی تصویر:
تصویر
برچسبگذاری
شده
تصویر
اصلی
روش ارائه
شده
30/3
4
37.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
نتیجه بررسی بر روی تصویر:
تصویر
برچسبگذاری
شده
تصویر
اصلی
روش ارائه
شده
31/3
4
38.
نتیجه گیری39.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
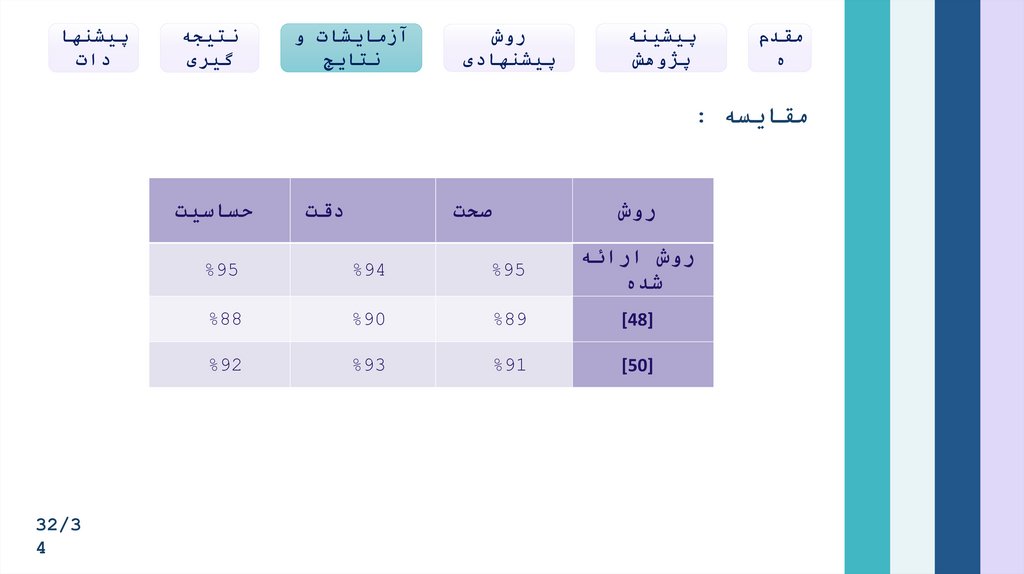
مقایسه :
روش
دقت
صحت
حساسیت
روش ارائه
شده
%95
%94
%95
][48
%89
%90
%88
][50
%91
%93
%92
32/3
4
40.
مقدمه
روش
پیشنهادی
پیشینه
پژوهش
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
جمعبندی:
• بهبود در دقت و کاهش سرعت پردازش دستهبندی با تحلیل تصاویر در
سطح نواحی همگن کوچک قابل دستیابی است.
• تعداد مناسب از نواحی همگن ،تعداد متوسط و میانه است .بهصورتی
که ،تعداد باالی این نواحی موجب دشواری تحلیل مدل دستهبندی شده و
تعداد پایین این نواحی دقت تفکیک مرزهای عوارض را کاهش میدهد.
• افزودن ویژگیهای
EMP
تأثیر باالیی در بهبود دقت تفکیک عوارض موجود
در تصاویر هوایی دارد.
• استخراج مجموعه کامل از ویژگیها و سپس انتخاب زیرمجموعهای بهینه
ویژگیهای از ویژگیها منجر به بهبود دقت و سرعت خواهد شد.
33/3
• با استفاده از ترکیب چند مدل دستهبندی در قالب رویکردهای ترکیبی
4
مانند بوستینگ میتوان دقت دستهبندی را افزایش داد.
41.
پیشنهادات42.
مقدمه
پیشینه
پژوهش
روش
پیشنهادی
آزمایشات و
نتایج
نتیجه
گیری
پیشنها
دات
پیشنهادا
ت:
• تمرکز بیشتر روی تجزیه تصویر به نواحی همگن ،استفاده از روشهای
جدیدتر در این حوزه یا معرفی روشهایی ابتکاری و جدید.
• بکارگیری روشهای استخراج ویژگی جدیدتر مانند تبدیل کانتورلت ،تبدیل
کرولت و مواردی از این دست برای استخراج ویژگیهای بیشتر و بهتر.
• افزایش تعداد تصاویر مورد استفاده و بهکارگیری روشهای یادگیری عمیق
به روز برای تحلیل تصاویر هوایی.
• ترکیب روشهای دستهبندی مختلف در قالب رویکردهای مختلف برای ترکیب
تواناییهای هر کدام.
34/3
4
43.
با تشکر ازتوجه شما