




























 Физика
Физика Электроника
ЭлектроникаПохожие презентации:










Методы измерений электрических и магнитных свойств функциональных материалов
Методы измерений электрических и магнитных свойств функциональных материалов ОБЩАЯ ХАРАКТЕРИСТИКА ПРОЦЕССА ИЗМЕРЕНИЙ Виды и методы измерений Что есть измерение? Измерение это нахождение значения физической величины опытным путем с использованием специальных технических средств Целью измерения является получение количественной информации об измеряемой величине, а результатом - значение физической величины Качество измерений определяется погрешностью (неопределенностью) результата измерения Для проведения измерений необходимы: средства измерения метод или способ измерения Какие виды измерений существуют? Прямым называют измерение, при котором искомое значение величины находят непосредственно из опытных данных с использованием прибора, проградуированного в единицах измеряемой величины Косвенным называют измерение, при котором искомое значение величины находят на основании известной зависимости между этой величиной и величинами, полученными посредством прямых измерений.
Совокупными называют проводимые одновременно измерения нескольких одноименных величин , при этом искомые значения каждой из величин находят решением системы уравнений, получаемых по результатам прямых измерениях различных сочетаний этих величин Совместными называют проводимые одновременно измерения 2-х или нескольких не одноименных величин для нахождения зависимости между ними.
Методы прямых измерений Методы непосредственной оценки – это методы, при которых значение величины определяют непосредственно по отсчетному устройству измерительного прибора прямого действия Методы сравнения с мерой – это методы, основанные на сравнении измеряемой величины с величиной, воспроизводимой мерой В зависимости от способа сравнения различают1.
дифференциальный метод2.
нулевой метод3.
метод замещения Физические величины и единицы измерения Физическими величинами называют измеряемые характеристики физических объектов Основных величин 7 : длина (L) , время (T ), масса (M), температура (, T ), сила тока (I ), количество вещества (N) и сила света ( J, I) Для обозначения однородных величин вводят понятие размерности Например, dim G = L – величина G имеет размерность длины dim v = длина.
время-1 =L.
T-1 Для осуществления измерений физических величин установлены соответствующие единицы измерения В СИ семь основных единиц : метр (м), килограмм (кг), секунда (с), Ампер (А), Кельвин (К), моль (моль), кандела (кд) Все остальные единицы СИ являются производными от основных и представляют собой произведения степеней основных единиц, не содержащие численных коэффициентов.
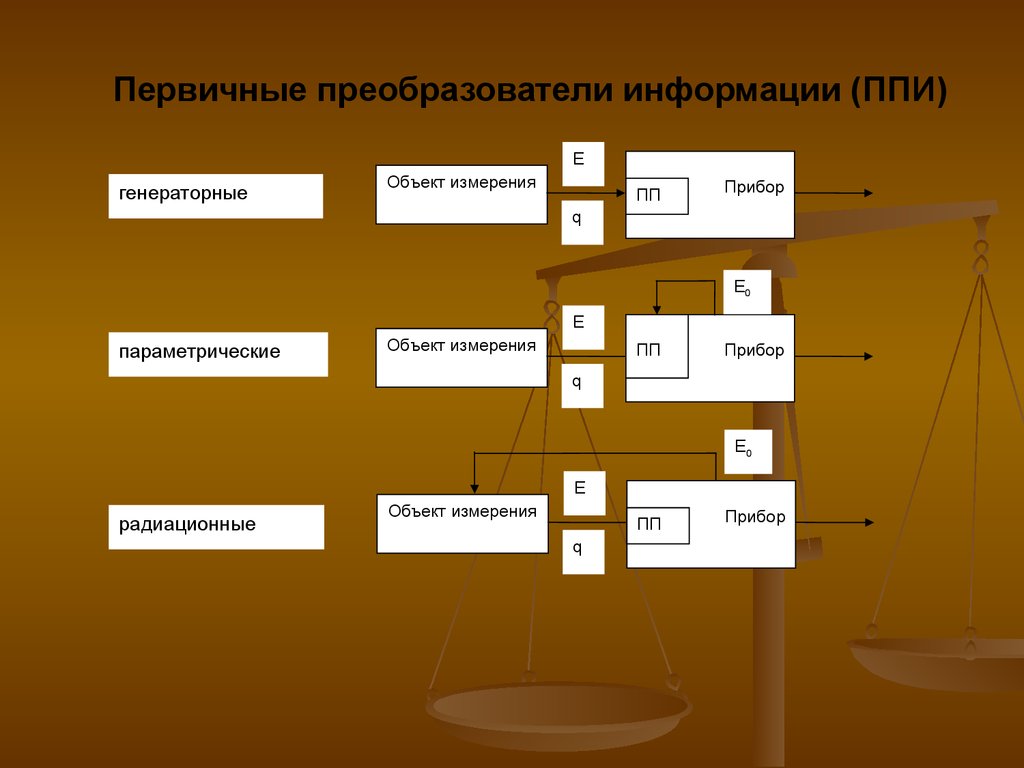
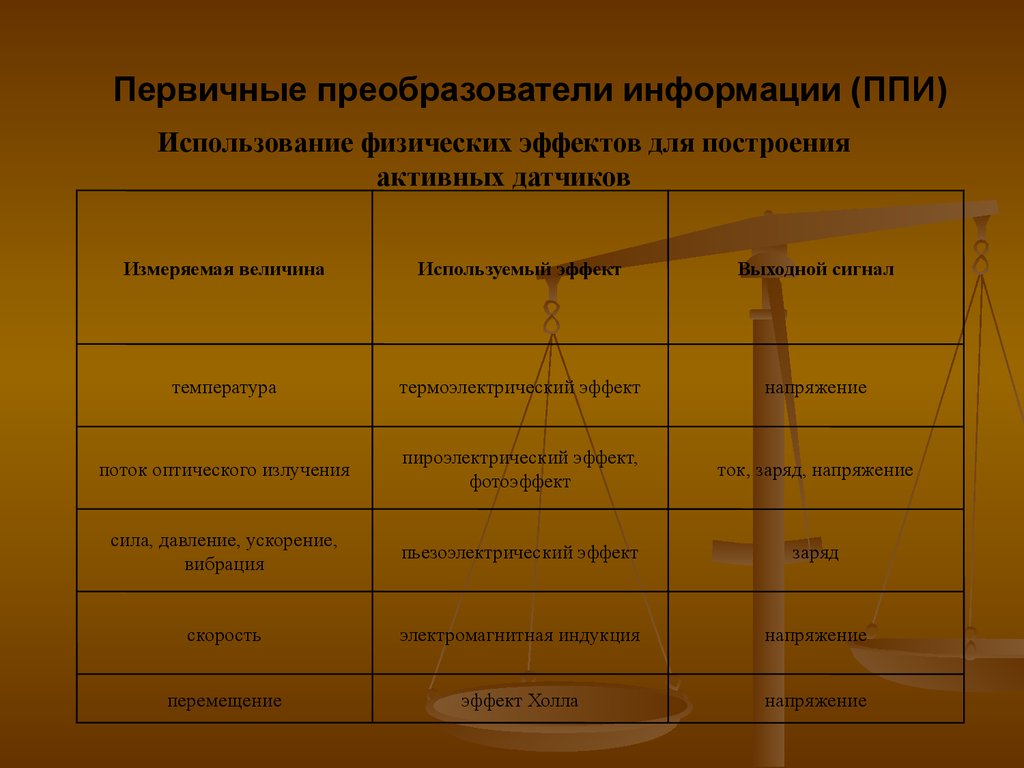
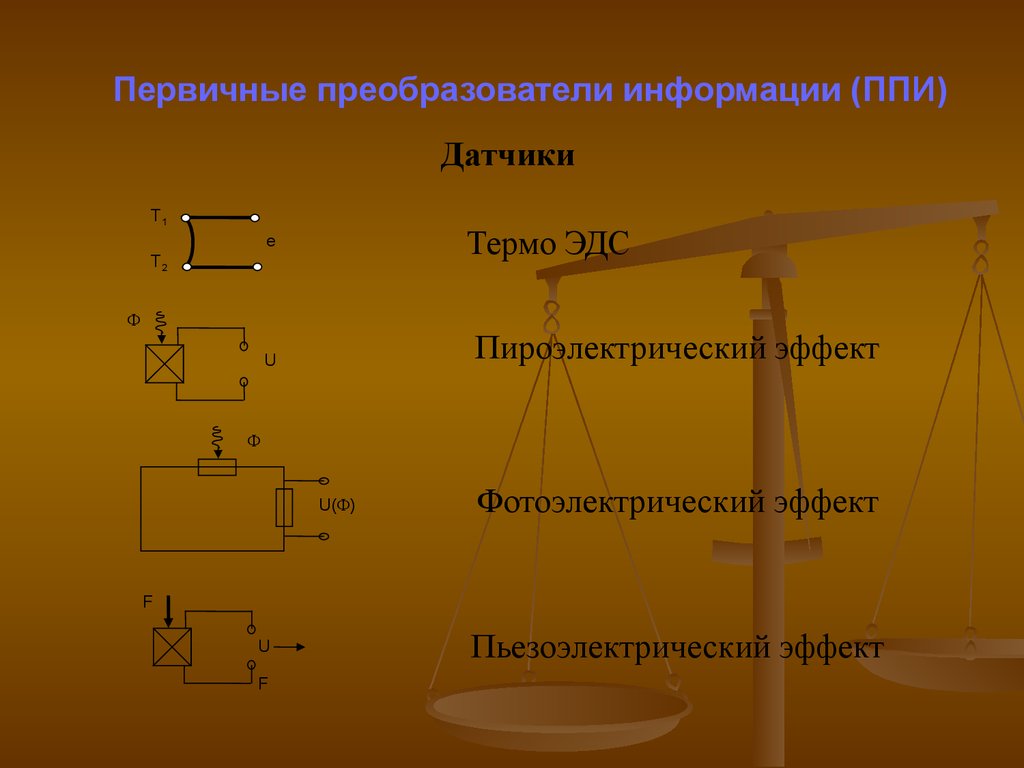
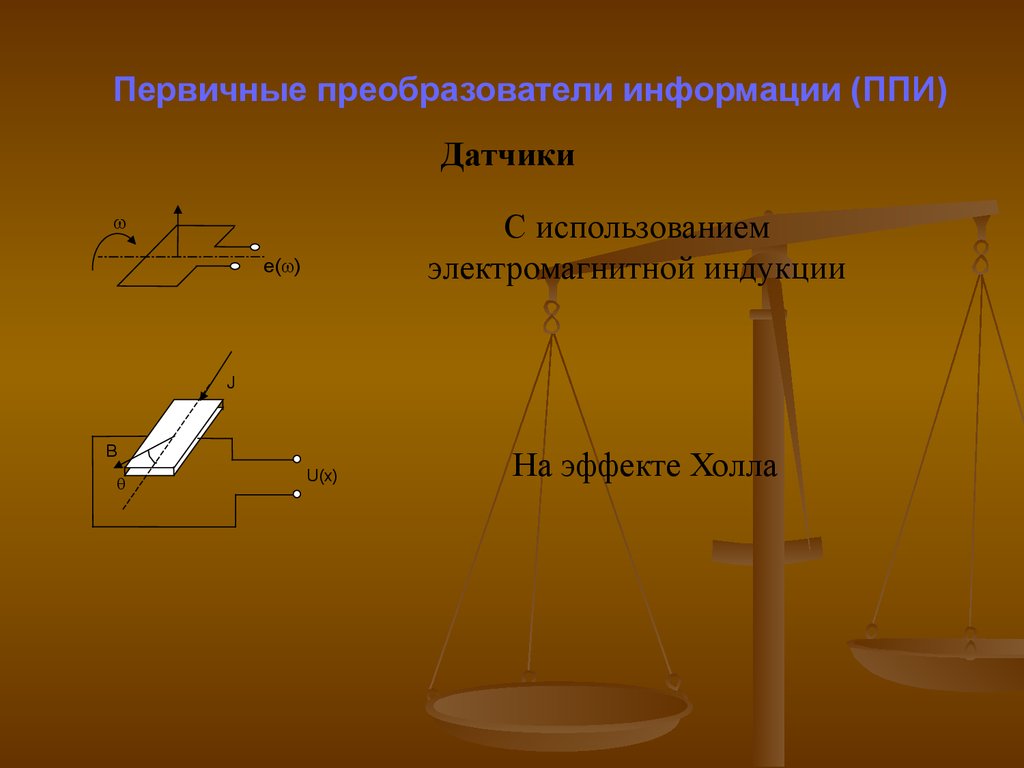
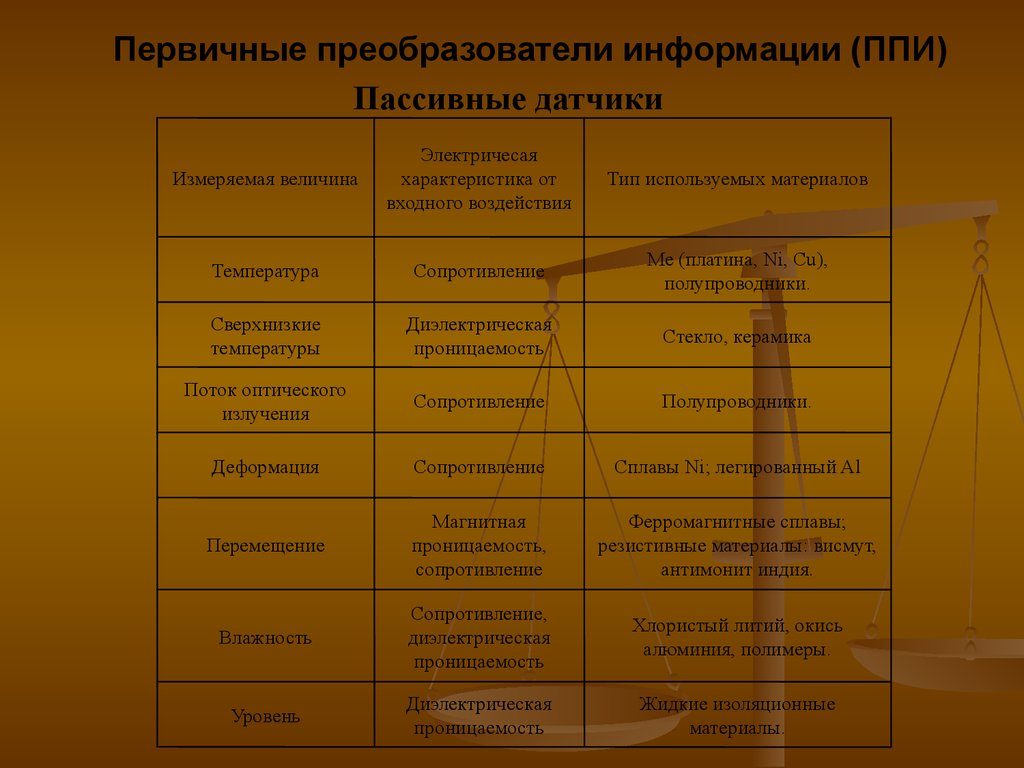
Например, единица СИ магнитной индукции: [B]=В.с.м-2 =Тл Объект измерения Прибор ППEq Объект измерения Прибор ППEqE0 Объект измерения Прибор ППEqE0 генераторные параметрические радиационные Первичные преобразователи информации (ППИ) Датчики Активные Пассивные Первичные преобразователи информации (ППИ) преобразование измеряемой величины в электрический сигнал выходной электрический сигнал по R, L, C Использование физических эффектов для построения активных датчиков напряжение эффект Холла перемещение напряжение электромагнитная индукция скорость заряд пьезоэлектрический эффект сила, давление, ускорение, вибрация ток, заряд, напряжение пироэлектрический эффект, фотоэффект поток оптического излучения напряжение термоэлектрический эффект температура Выходной сигнал Используемый эффект Измеряемая величина Первичные преобразователи информации (ППИ) ДатчикиT1T2e Термо ЭДСU Пироэлектрический эффектU() Фотоэлектрический эффектUF Пьезоэлектрический эффект Первичные преобразователи информации (ППИ) Датчикиe() С использованием электромагнитной индукцииJB U(x) На эффекте Холла Первичные преобразователи информации (ППИ) Пассивные датчики Жидкие изоляционные материалы.
Диэлектрическая проницаемость Уровень Хлористый литий, окись алюминия, полимеры.
Сопротивление, диэлектрическая проницаемость Влажность Ферромагнитные сплавы;
резистивные материалы: висмут, антимонит индия.
Магнитная проницаемость, сопротивление Перемещение Сплавы Ni;
легированный Al Сопротивление Деформация Полупроводники.
Сопротивление Поток оптического излучения Стекло, керамика Диэлектрическая проницаемость Сверхнизкие температуры Me (платина, Ni, Cu), полупроводники.
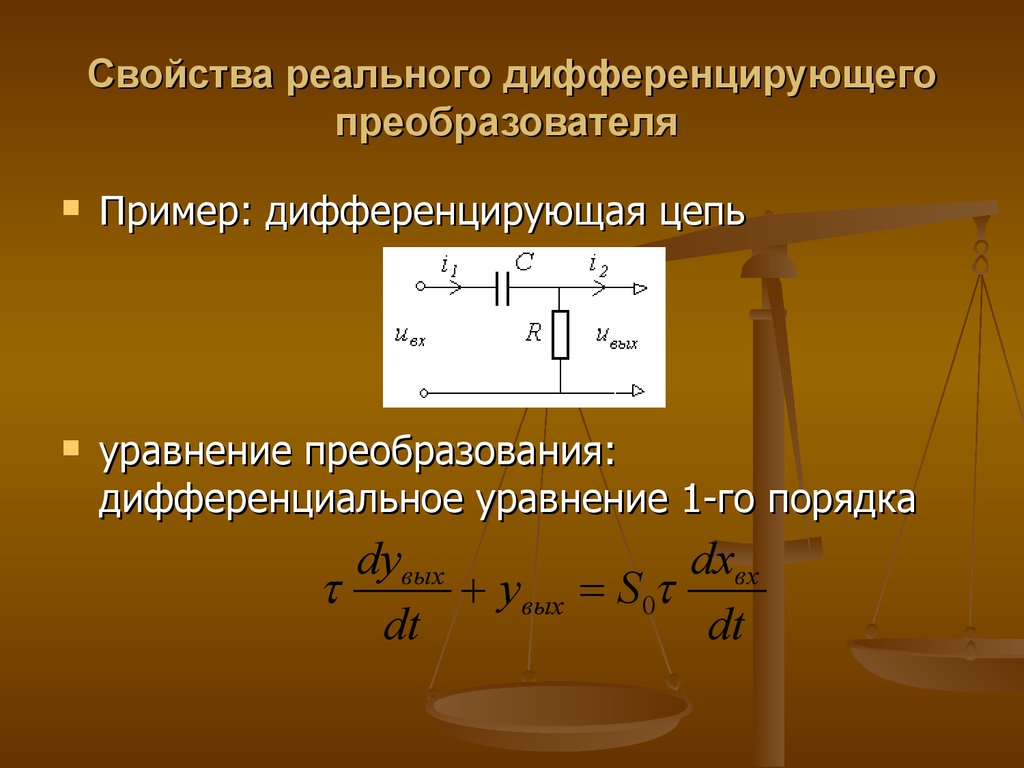
Сопротивление Температура Тип используемых материалов Электричесая характеристика от входного воздействия Измеряемая величина О погрешностях измерения Погрешность это отклонение результата измерения от истинного значения измеряемой величины По форме погрешности делят на абсолютнуюи относительную Δ = А - А ист По источникам погрешности делят на инструментальную, методическуюи субъективную По характеру погрешности делят на систематическую и случайную%100дA СРЕДСТВА ИЗМЕРЕНИЙ СИ – это технические устройства, используемые при измерениях и имеющие нормированные метрологические характеристики Средства измерений Эталоны Меры Измерительные преобразователи Измерительная установка Измерительные информационные системы Измерительно- вычислительные комплексы аналоговые АЦП Преобразователи код-код ЦАП Статические характеристики и параметры СИ Уравнением преобразования называют однозначную функциональную зависимость между выходной величиной -y и входной величиной -х, которая может быть выражена аналитически – y=f(x) или графически Чувствительность СИ определяет скорость изменения выходной величины при изменении входной Порогом чувствительности СИ называют изменение входной величины, вызывающее наименьшее изменение выходной величины, которое может быть обнаружено с помощью данного СИ без каких-либо дополнительных устройств Область значений между верхним и нижним пределами определяет диапазон измерений Погрешность средства измерения разделяют на основную погрешность и дополнительную погрешность Входное сопротивление Выходное сопротивление Время успокоения прибора – промежуток времени с момента включения измеряемой величины до момента, когда указатель отсчетного устройства не будет удаляться от установившегося отклонения более, чем на 1% длины шкалы Время измерения- время, необходимое для обработки входного сигнала и его индикации Динамические характеристики и параметры СИ Уравнение преобразования, чувствительность, погрешность связаны с амплитудой и частотой входного сигнала Динамической чувствительностью преобразователя является функция, представляющая собой отношение мгновенных значений выходной и входной величин Идеальный преобразователь осуществляет заданное преобразование без искажений Реальные преобразователи (СИ) обладают инерционными или динамическими свойствами преобразователи Безинерционные s ≠ f(ω) инерционные дифференцирующие s ~ ω интегрирующие s ~ 1/ω Свойства дифференцирующего преобразователя Для дифференцирующего преобразователя выходная величина пропорциональна производной от входной величины( уравнение преобразования )dtdxSy вх вых0 Синусоидальный сигнал на входе дифференцирующего преобразователя Динамическая чувствительность (АЧХ) дифференцирующего преобразователя линейно зависит от частоты входного сигнала Выходной сигнал дифференцирующего преобразователя на 900 опережает входной (фазовая характеристика) Свойства реального дифференцирующего преобразователя Пример: дифференцирующая цепь уравнение преобразования: дифференциальное уравнение 1-го порядкаdtdxSydtdy вх вых0 Синусоидальный сигнал на входе реального дифференцирующего преобразователя20)(1 SXYS вх вых 1 arctg на низких частотах (при 1) его чувствительность (сплошная кривая) становится пропорциональной частоте, т.е.
он приближается к идеальному дифференцирующему преобразователю;
на высоких частотах (при 1) его чувствительность (пунктирная кривая) не зависит от частоты, т.е.
он ведет себя как безинерционный преобразователь.
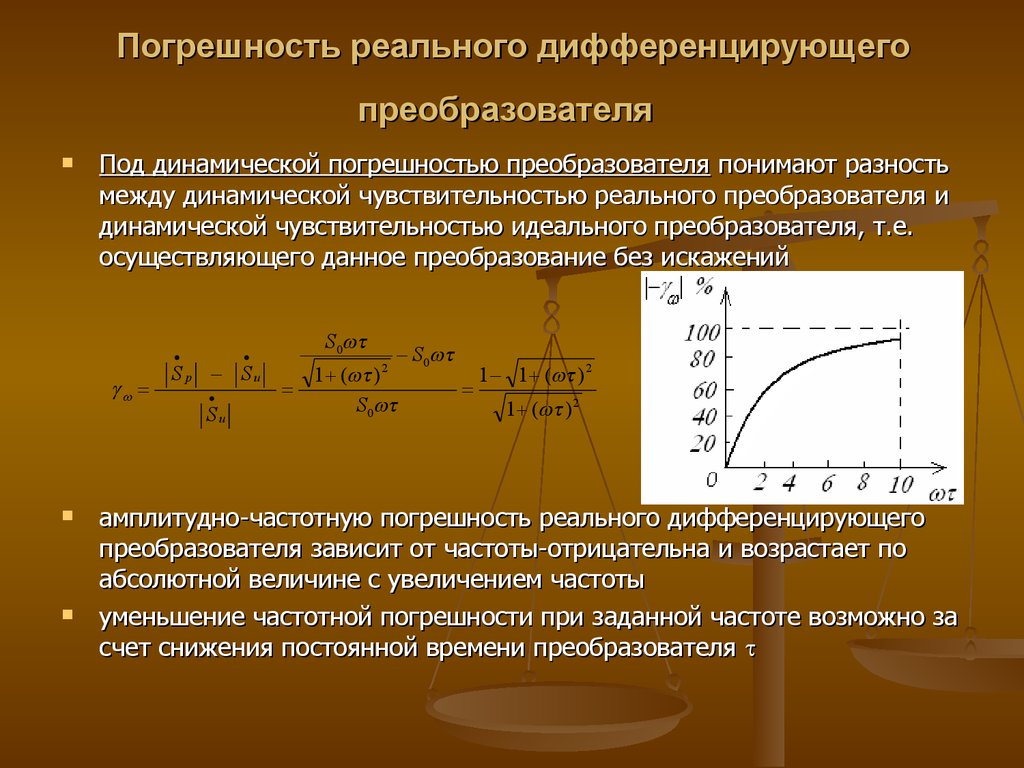
АЧХ ФЧХ Погрешность реального дифференцирующего преобразователя Под динамической погрешностью преобразователя понимают разность между динамической чувствительностью реального преобразователя и динамической чувствительностью идеального преобразователя, т.е.
осуществляющего данное преобразование без искажений амплитудно-частотную погрешность реального дифференцирующего преобразователя зависит от частоты- отрицательна и возрастает по абсолютной величине с увеличением частоты уменьшение частотной погрешности при заданной частоте возможно за счет снижения постоянной времени преобразователя2020)(1)(1)(1 Sир Свойства интегрирующего преобразователя Сигнал на выходе интегрирующего преобразователя пропорционален интегралу от входного.
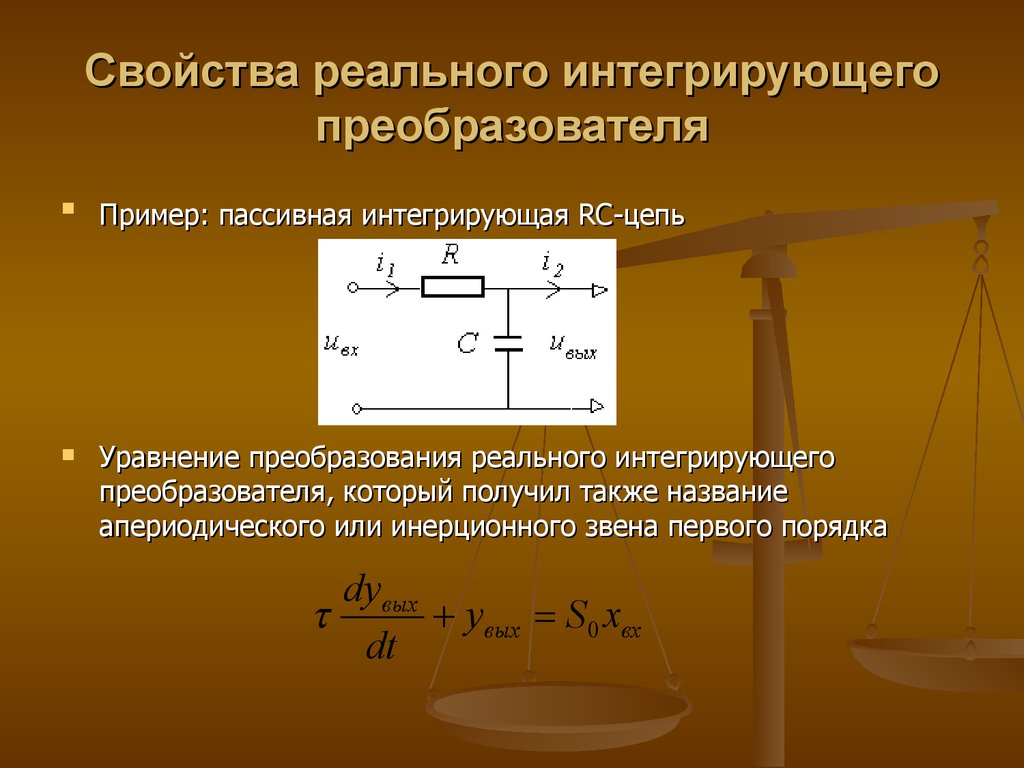
Уравнение преобразования в интегральной и дифференциальной форме имеет вид:dtxSy вх вых0 вх выхxSdtdy0 Синусоидальный сигнал на входе интегрирующего преобразователя Амплитудно- частотная характеристика интегрирующего преобразователя обратно пропорциональна частоте входного сигнала Фазовая характеристика не зависит от частоты входного сигнала и характеризует отставание выходной величины от входной на угол π/2 0SXYS вх вых = arctg (-∞)= –π/2 Свойства реального интегрирующего преобразователя Пример: пассивная интегрирующая RC-цепь Уравнение преобразования реального интегрирующего преобразователя, который получил также название апериодического или инерционного звена первого порядка вх выхxSydtdy0 Синусоидальный сигнал на входе реального интегрирующего преобразователя АЧХ: ФЧХ: безразмерная чувствительность реального интегрирующего преобразователя уменьшается почти обратно пропорционально ωτ (сплошная кривая)и близка по характеру к зависимости для идеального интегрирующего преобразователя.
При ωτ>>1 преобразователь приближается к идеальному интегрирующему преобразователю, при ωτ<<1– к безинерционному.
Фазовая характеристика , т.е.
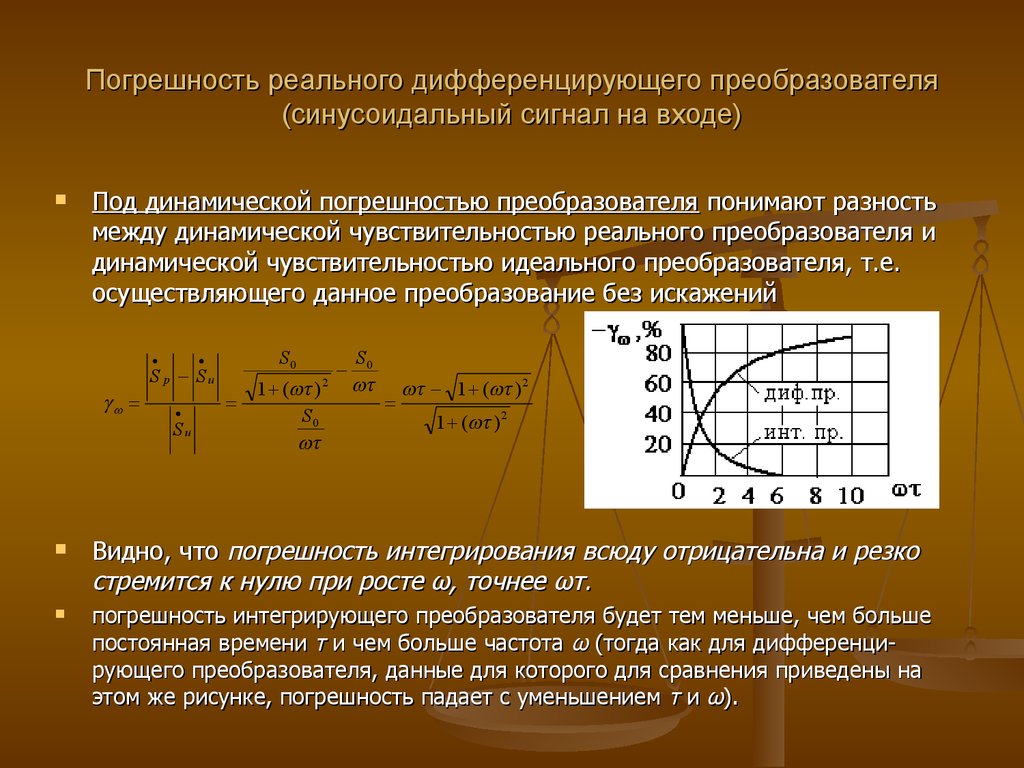
угол сдвига фаз между выходным и входным сигналами, нарастает с увеличением частоты и асимптотически стремится к –π/2.20)(1 SXYS вх вых)(ReIm arctgS arctg Погрешность реального дифференцирующего преобразователя (синусоидальный сигнал на входе) Под динамической погрешностью преобразователя понимают разность между динамической чувствительностью реального преобразователя и динамической чувствительностью идеального преобразователя, т.е.
осуществляющего данное преобразование без искажений Видно, что погрешность интегрирования всюду отрицательна и резко стремится к нулю при росте ω, точнее ωτ.
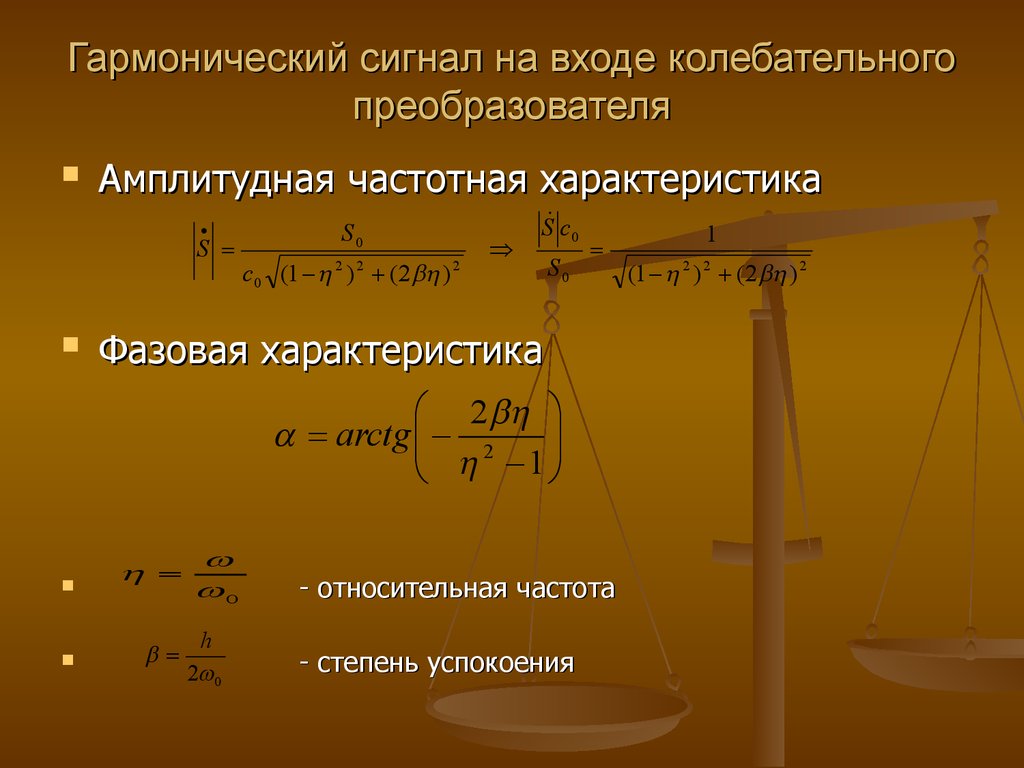
погрешность интегрирующего преобразователя будет тем меньше, чем больше постоянная времениτ и чем больше частотаω (тогда как для дифференци-рующего преобразователя, данные для которого для сравнения приведены на этом же рисунке, погрешность падает с уменьшениемτиω).2020)(1)(1)(1 Sир Свойства колебательного преобразователя К колебательным преобразователям относятся механические, акустические, гидравлические, электрические системы , в которых имеются обобщенныемасса, успокоение и жесткость, взаимосвязанные дифференциальным уравнением 2-го порядка вх выхxmSydtdyhdtyd0202 mPhmcT02 Гармонический сигнал на входе колебательного преобразователя Амплитудная частотная характеристика Фазовая характеристика - относительная частота - степень успокоения2020)2()1(1)2()1( ScScS12 arctg002h Безразмерные частотные характеристики колебательного преобразователя при различных значениях степени успокоенияβ.
наиболее равномерный вид имеет частотная характеристика при степени успокоения β=0,6-0,7;
при β ≥1/√2 = 0.707 характеристика не имеет подъема;
максимальное значение чувствительности при резонансной частоте ωрез и заданных S0 и С0 зависит только от степени успокоения β.
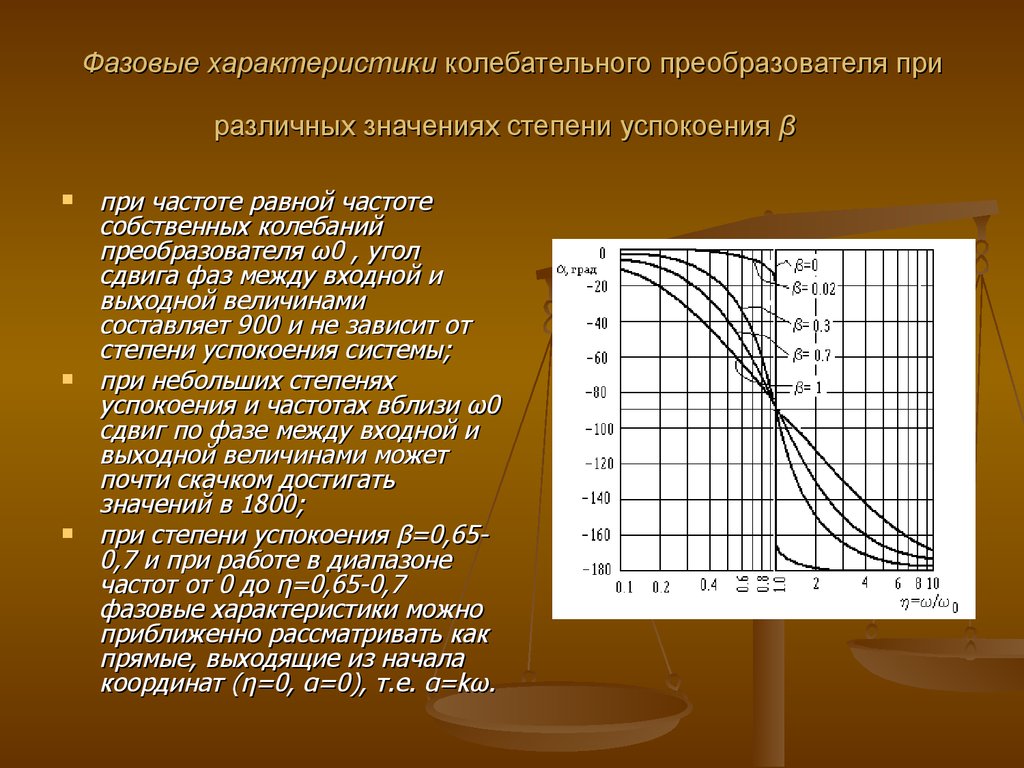
резонансная частота, найденная из условия экстремума АЧХ, зависит от степени успокоения и отличается от собственной частоты ω0:2021 рез Фазовые характеристики колебательного преобразователя при различных значениях степени успокоенияβ при частоте равной частоте собственных колебаний преобразователя ω0 , угол сдвига фаз между входной и выходной величинами составляет 900 и не зависит от степени успокоения системы;
при небольших степенях успокоения и частотах вблизи ω0 сдвиг по фазе между входной и выходной величинами может почти скачком достигать значений в 1800;
при степени успокоения β=0,65- 0,7 и при работе в диапазоне частот от 0 до η=0,65-0,7 фазовые характеристики можно приближенно рассматривать как прямые, выходящие из начала координат (η=0, α=0), т.е.
α=kω.
Погрешности колебательного преобразователя при синусоидальном сигнале на входе Погрешность зависит от степени успокоения в системе Выделяются три крайних случая =0, т.е.
успокоение отсутствует =1, критическое успокоение =0,707=2/2,1)2()1(12 ирS2121 12 Погрешность колебательного преобразователя при разных степенях успокоения =0 1 ( 0) погрешность быстро возрастает;
=1 (= 0) погрешность ;
1 ( 0) погрешность становится отрицательной и быстро увеличивается по абсолютной величине.
=1 Видно, что погрешность при всех частотах отрицательна и быстро возрастает с ростом частоты.
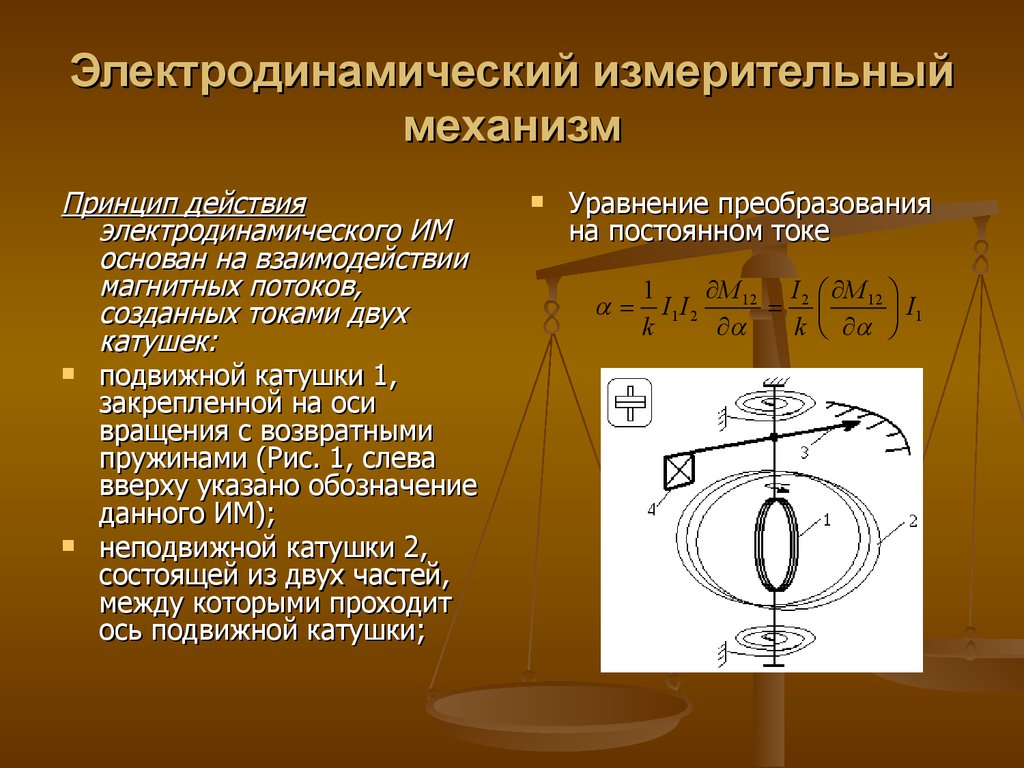
=0,707=2/2 погрешность также всюду остается отрицательной, но возрастает значительно медленнее, чем при=1 Для =0,6, то видно, что с изменением частоты погрешность изменяется наиболее благоприятно Электродинамический измерительный механизм Принцип действия электродинамического ИМ основан на взаимодействии магнитных потоков, созданных токами двух катушек: подвижной катушки 1, закрепленной на оси вращения с возвратными пружинами (Рис.
1, слева вверху указано обозначение данного ИМ);
неподвижной катушки 2, состоящей из двух частей, между которыми проходит ось подвижной катушки;
Уравнение преобразования на постоянном токе11221221IMkIMIk Уравнение преобразования электродинамического ИМ на переменном токеcos12112IMk
• Отклонение подвижной части измерительного механизма электродинамической системы обусловлено действием токов двух катушек, одна из которых неподвижна, другая – подвижна.
• Возможность использования ИМ в цепях постоянного и в цепях переменного тока.
• Измерительный механизм обладает перемножающим свойством двух величин (токов и напряжений).
• Измерительный механизм, благодаря чувствительности к внешним магнитным полям, требует экранирования.
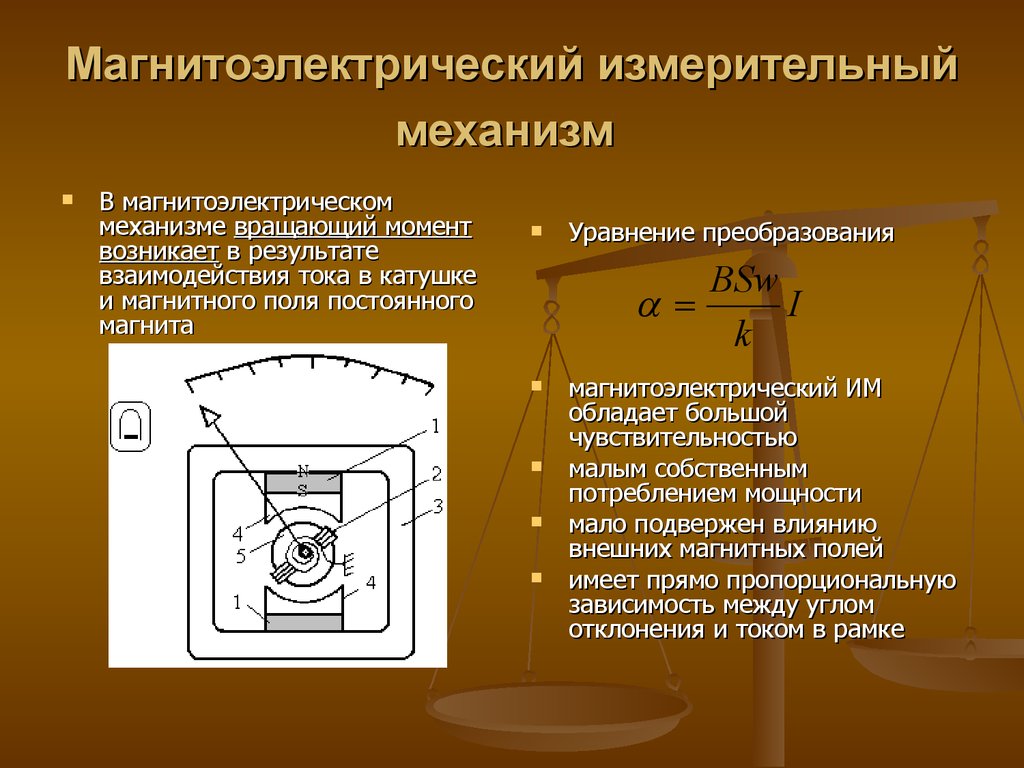
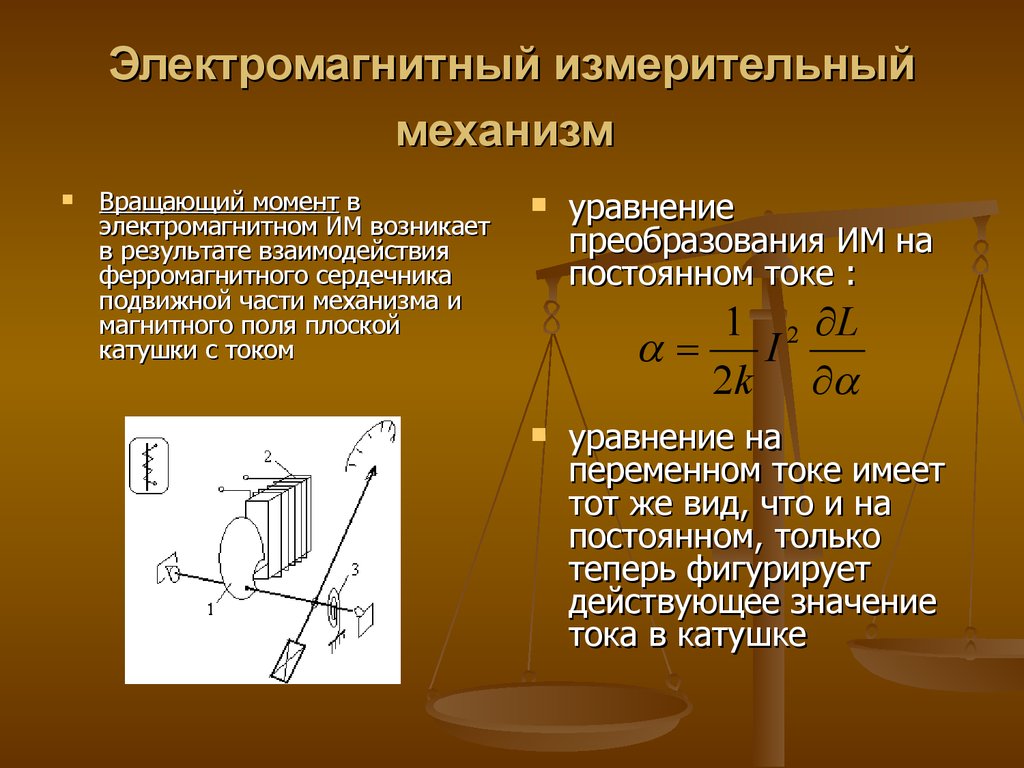
Магнитоэлектрический измерительный механизм В магнитоэлектрическом механизме вращающий момент возникает в результате взаимодействия тока в катушке и магнитного поля постоянного магнита Уравнение преобразования магнитоэлектрический ИМ обладает большой чувствительностью малым собственным потреблением мощности мало подвержен влиянию внешних магнитных полей имеет прямо пропорциональную зависимость между углом отклонения и током в рамкеIkBSw Электромагнитный измерительный механизм Вращающий момент в электромагнитном ИМ возникает в результате взаимодействия ферромагнитного сердечника подвижной части механизма и магнитного поля плоской катушки с током уравнение преобразования ИМ на постоянном токе : уравнение на переменном токе имеет тот же вид, что и на постоянном, только теперь фигурирует действующее значение тока в катушкеLIk21 Электростатический измерительный механизм Вращающий момент в электростатических механизмах возникает в результате взаимодействия двух систем заряженных проводников, одна из которых является подвижной Уравнение преобразования на постоянном токе При синусоидальном переменном токе уравнение преобразования имеет тот же вид, что и на постоянном токе, с заменой постоянного напряженияU на действующее значениеUд21UCk Свойства электростатического ИМ Видно, что угол поворота электростатического механизма от измеряемого напряжения зависит нелинейно.
Линейную зависимость получают путем изготовления пластин специальной формы, при которой является требуемой функцией от угла α.
Электростатический механизм имеет малое собственное потребление мощности от измеряемой цепи (на постоянном токе потребление равно нулю).
На результат измерения малое влияние оказывают температура окружающей среды, частота и форма измеряемого напряжения.
Отсутствует влияние магнитных полей, но влияют внешние электростатические поля, для защиты от которых используют металлические экраны.
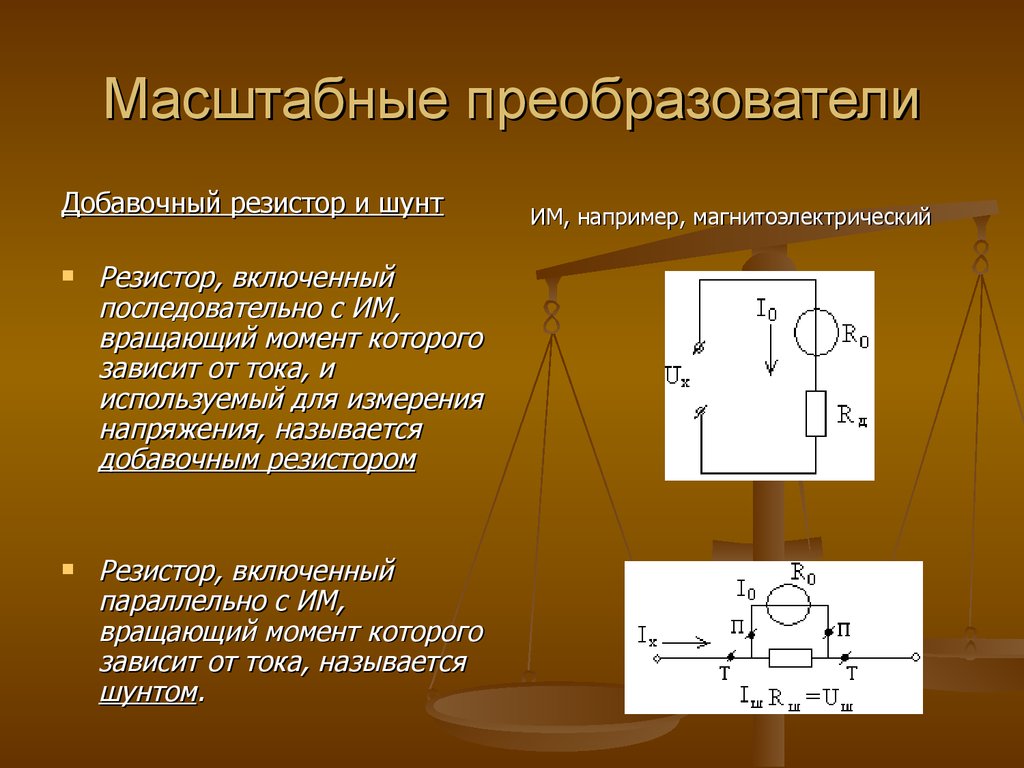
Масштабные преобразователи Добавочный резистор и шунт Резистор, включенный последовательно с ИМ, вращающий момент которого зависит от тока, и используемый для измерения напряжения, называется добавочным резистором Резистор, включенный параллельно с ИМ, вращающий момент которого зависит от тока, называется шунтом.
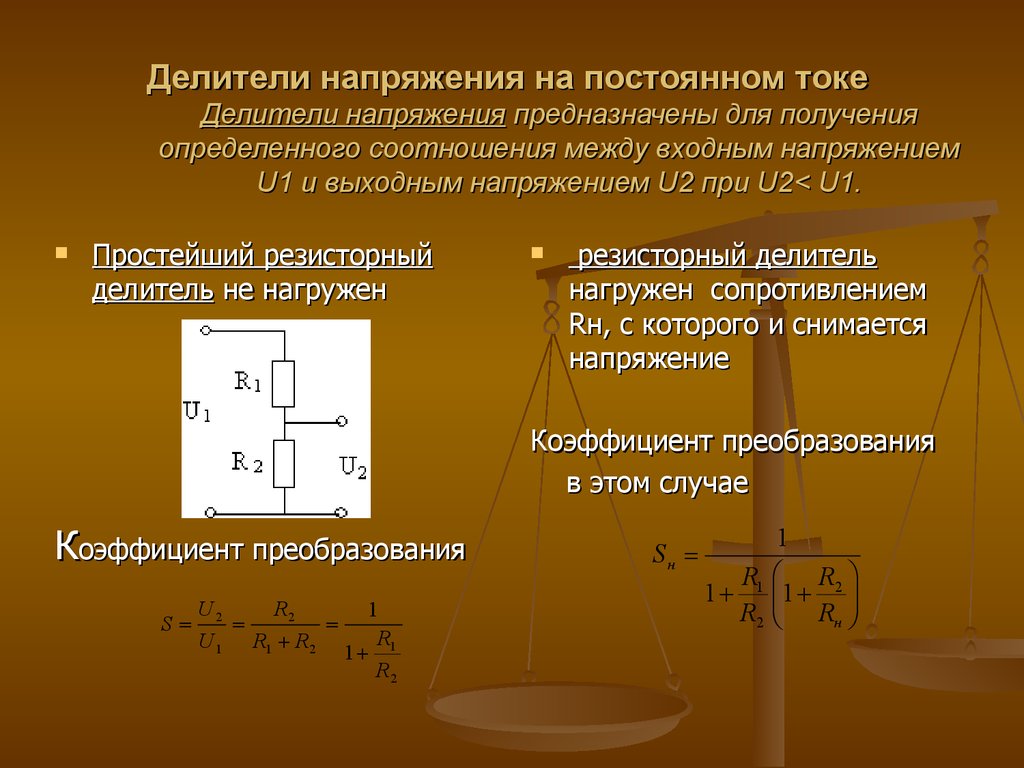
ИМ, например, магнитоэлектрический Делители напряжения на постоянном токе Делители напряжения предназначены для получения определенного соотношения между входным напряжением U1 и выходным напряжением U2 при U2< U1.
Простейший резисторный делитель не нагруженК оэффициент преобразования резисторный делитель нагружен сопротивлением Rн, с которого и снимается напряжение Коэффициент преобразования в этом случае21212121RUS нRS21 Делители напряжения на переменном токе На переменном токе в общем случае коэффициент преобразования является комплексной величиной Z1, Z2 - полные комплексные сопротивления соответствующих участков делителя.
на переменном токе между напряжениямиU1 иU2 появляется угол сдвига, который является угловой погрешностью делителя.
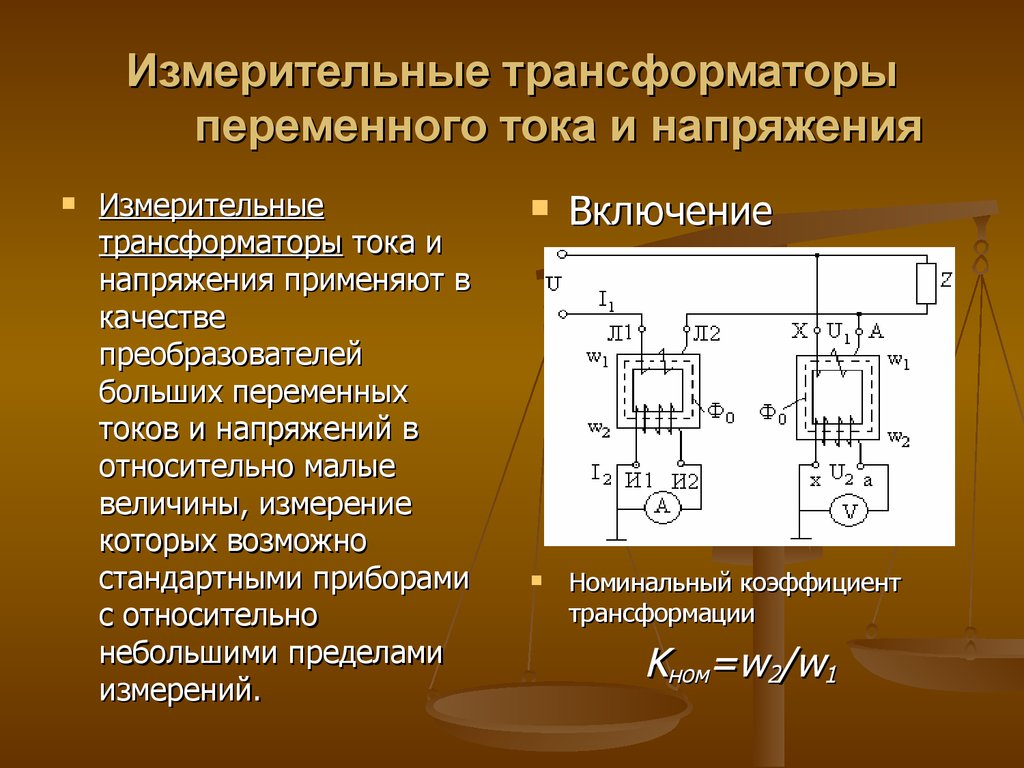
Простейший конденсаторный делитель в пределе высоких частот пределе низких частот R1, R2 –сопротивления изоляции конденсаторов2121ZUS 21CSC 212RSR Измерительные трансформаторы переменного тока и напряжения Измерительные трансформаторы тока и напряжения применяют в качестве преобразователей больших переменных токов и напряжений в относительно малые величины, измерение которых возможно стандартными приборами с относительно небольшими пределами измерений.
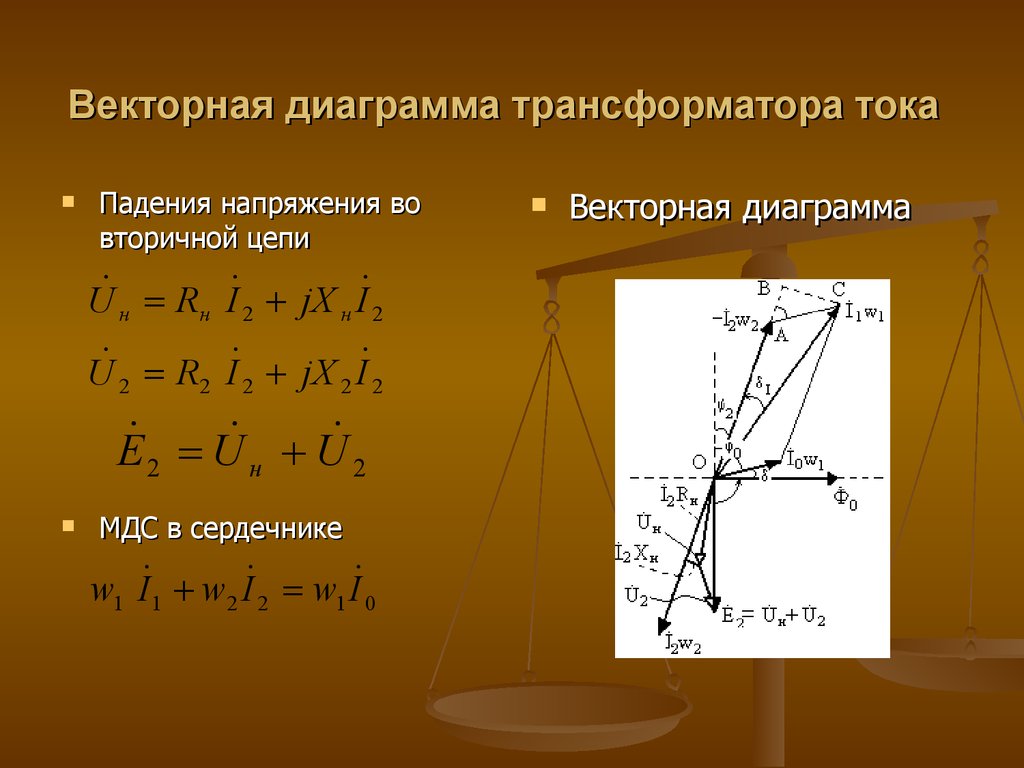
Включение Номинальный коэффициент трансформацииK ном=w2/w1 Векторная диаграмма трансформатора тока Падения напряжения во вторичной цепи МДС в сердечнике Векторная диаграмма2IjXIRUн 2IjXIRU 2UEн 0121IwIwIw Выводы по диаграмме МДС оказывает размагничивающее действие на сердечник («–» в законе ЭМИ), т.к.
индукционный ток сдвинут по фазе по отношению к почти на1800 Вектор МДС , не совпадает по фазе с созданным им потоком .
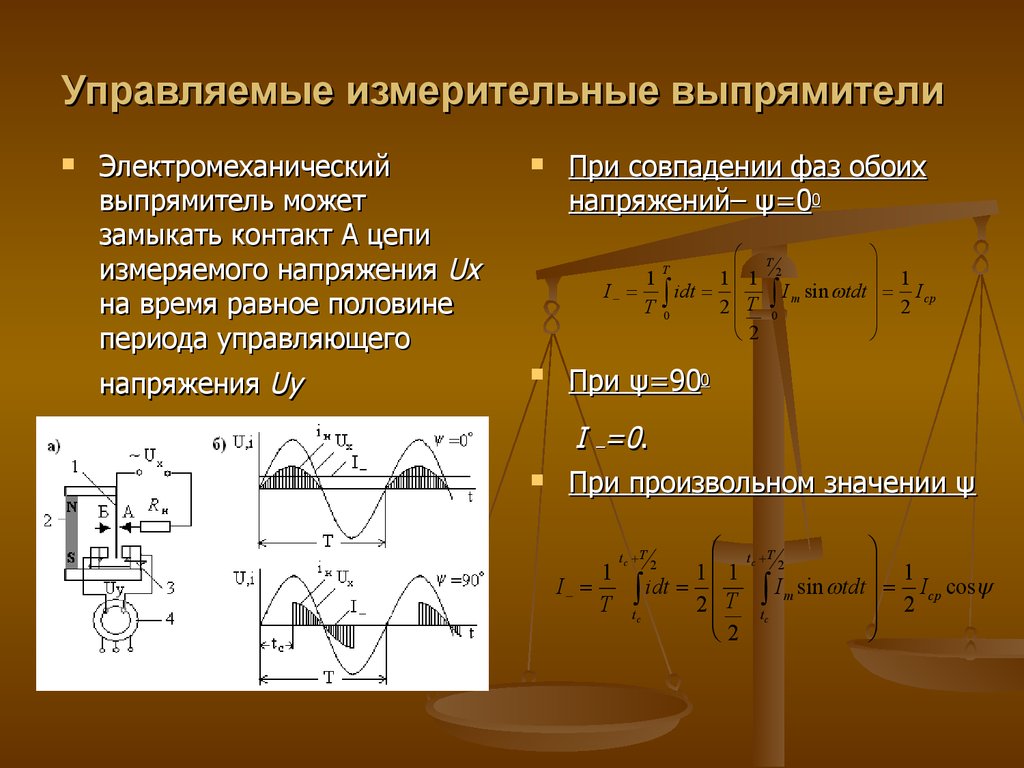
Отставание потока на уголδ обусловлено наличием гистерезиса и вихревых токов в сердечнике (или другими словами потерями в сердечнике) Видно, что токи и не совпадают по фазе на угол δI, который, таким образом, определяет угловую погрешность преобразования Основные соотношения, полученные с помощью диаграммы Ток в первичной обмотке Действительный коэффициент трансформации Токовая погрешность Угловая погрешностьIwIwIOBwIcos) cos(cos201021 ) cos(202121 IwI) cos(2020121 IwIKI%100) cos(%10020210wIwIKI номI) cos() sin(20102010 wIwIwIOBBCtgI2010) sin(wIwI Из анализа полученных уравнений можно сделать следующие выводы: При возрастании сопротивления вторичной обмотки или ее разрыве (I2 =0) происходит возрастание МДС I0w1 до I1W1 , это в свою очередь вызывает резкое увеличение потокаФ0, сопровождающееся а) ростом потерь в сердечнике и его перегрев, б)ростом ЭДСЕ2 , что может вызвать аварийную ситуацию пробоя Увеличение сопротивления нагрузки вторичной цепи, например, за счет включения большого числа приборов, приводит к ростуI0 и тем самым к росту токовой и угловой погрешностей.I0 будет тем меньше, чем выше магнитная проницаемость сердечника и чем меньше магнитные потери, а также при уменьшении индукции до ~0,05-0,15 Тл Увеличение индуктивного сопротивления нагрузки приводит к увеличению углаψ2 и следовательно к увеличению токовой погрешности (растет значение косинуса) и уменьшению угловой погрешности (значение синуса уменьшается) Измерительные выпрямители Неуправляемые измерительные выпрямители среднего значения однополупериодный (a) и двухполупериодный (б) Отсчет по ИМ пропорционален среднему значению переменного тока, чувствительность второй схемы в два раза выше, чем первой а) б) срTmTISIStdtITSidtTS/202sin2121 срTISSIidtTS/021 Измерительные выпрямители максимального значения Если постоянная времениRн С>>T , гдеТ период напряженияUx , то наRн всегда будет напряжение U–~Um и данный выпрямитель можно использовать для измерения максимального значения переменного напряжения Управляемые измерительные выпрямители Электромеханический выпрямитель может замыкать контакт А цепи измеряемого напряженияUx на время равное половине периода управляющего напряжения Uу При совпадении фаз обоих напряжений– ψ=00 При ψ=900I–=0.
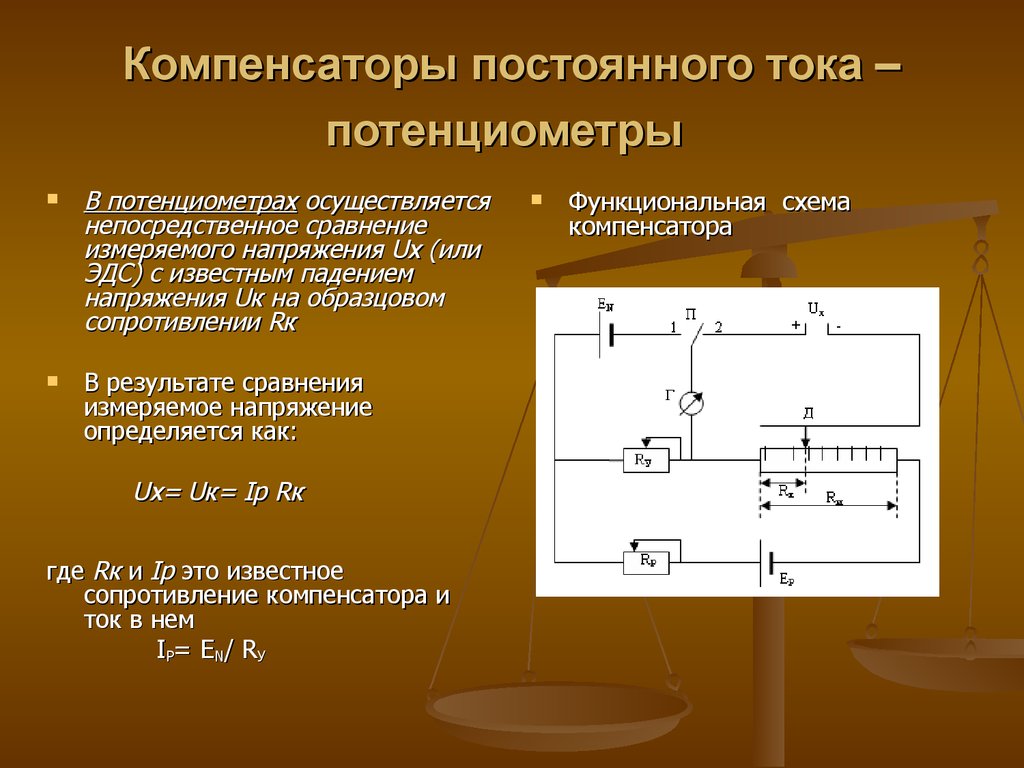
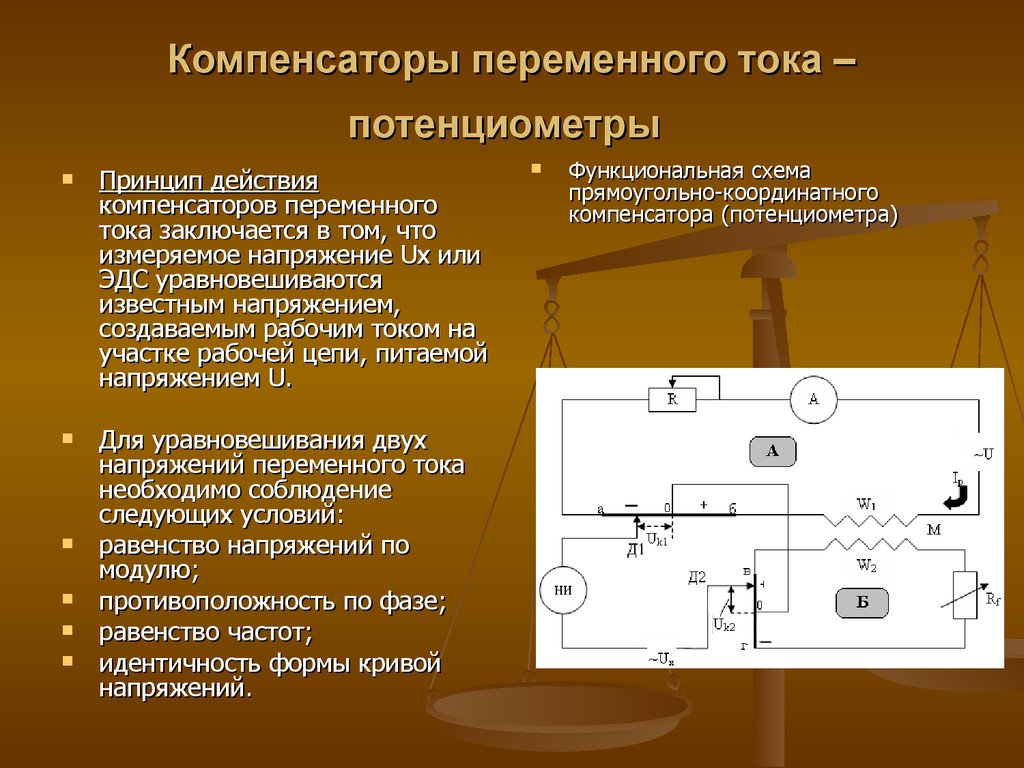
При произвольном значении ψ срTmTItdtITidtTI21sin212120cos21sin21212 срTtmTtItdtITidtTIc Компенсаторы постоянного тока – потенциометры В потенциометрах осуществляется непосредственное сравнение измеряемого напряжения Ux (или ЭДС) с известным падением напряжения Uк на образцовом сопротивлении Rк В результате сравнения измеряемое напряжение определяется как: Ux= Uк= Iр Rк гдеRкиIр это известное сопротивление компенсатора и ток в немIР= EN/ RУ Функциональная схема компенсатора Компенсаторы переменного тока – потенциометры Принцип действия компенсаторов переменного тока заключается в том, что измеряемое напряжение Ux или ЭДС уравновешиваются известным напряжением, создаваемым рабочим током на участке рабочей цепи, питаемой напряжением U.
Для уравновешивания двух напряжений переменного тока необходимо соблюдение следующих условий: равенство напряжений по модулю;
противоположность по фазе;
равенство частот;
идентичность формы кривой напряжений.
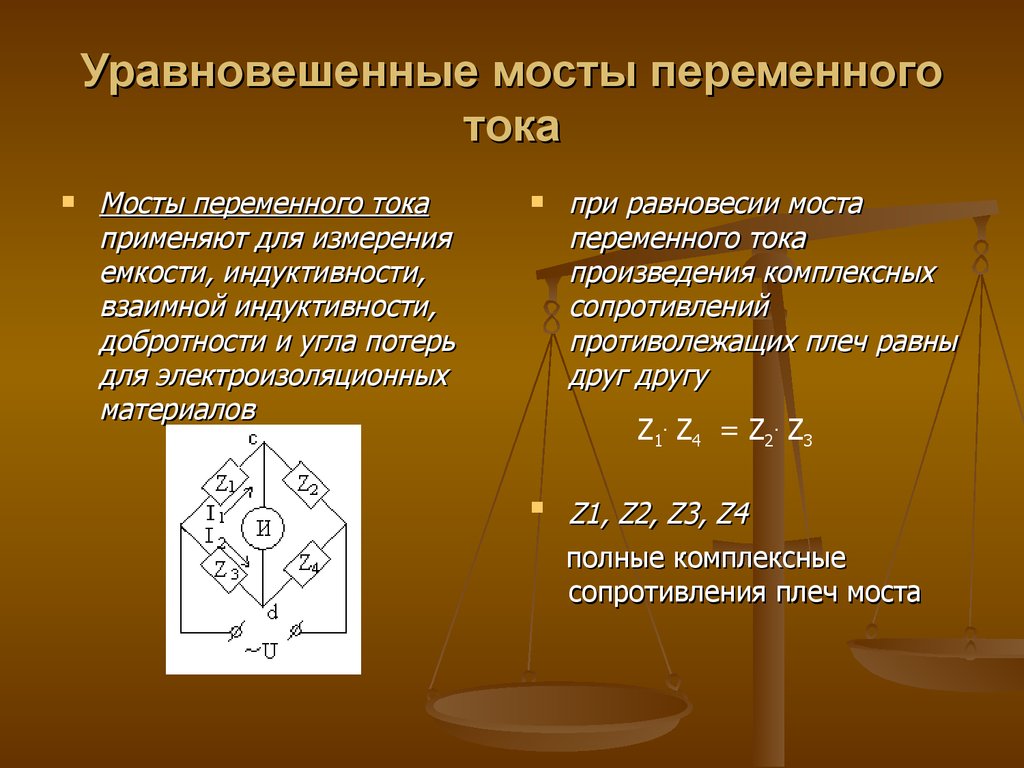
Функциональная схема прямоугольно-координатного компенсатора (потенциометра) Мосты постоянного тока схема одинарного моста Условие равновесия мостаR1R4 = R2 R3 Измеряемое сопротивление схема двойного моста моста Измеряемое сопротивление Измерение сопротивлений с помощью мостов осуществляет-ся с погрешностью 0,001-0,005 %.432Rx 43210430421RrRrRNx Уравновешенные мосты переменного тока Мосты переменного тока применяют для измерения емкости, индуктивности, взаимной индуктивности, добротности и угла потерь для электроизоляционных материалов при равновесии моста переменного тока произведения комплексных сопротивлений противолежащих плеч равны друг другу Z1, Z2, Z3, Z4 полные комплексные сопротивления плеч мостаZ1.
Z4 = Z2.
Z3 Отличительная особенность мостов переменного тока Из равенства двух комплексных чисел следует, что должны быть равны их реальные (вещественные) и мнимые части: r1 r4 - X1 X4 = r2 r3 - X2 X3 r1 X4 + r4 X1 = r2 X3 + r3 X2 1) два независимых уравнения позволяют определить мостом переменного тока одновременно две независимые величины;
2) для достижения равновесия моста переменного тока необходимо регулировать не менее двух параметров , входящих в уравнения равновесия Из показательной формы представления комплексных величин условия равновесия конкретизируютсяZ1.
Z4 = Z2.
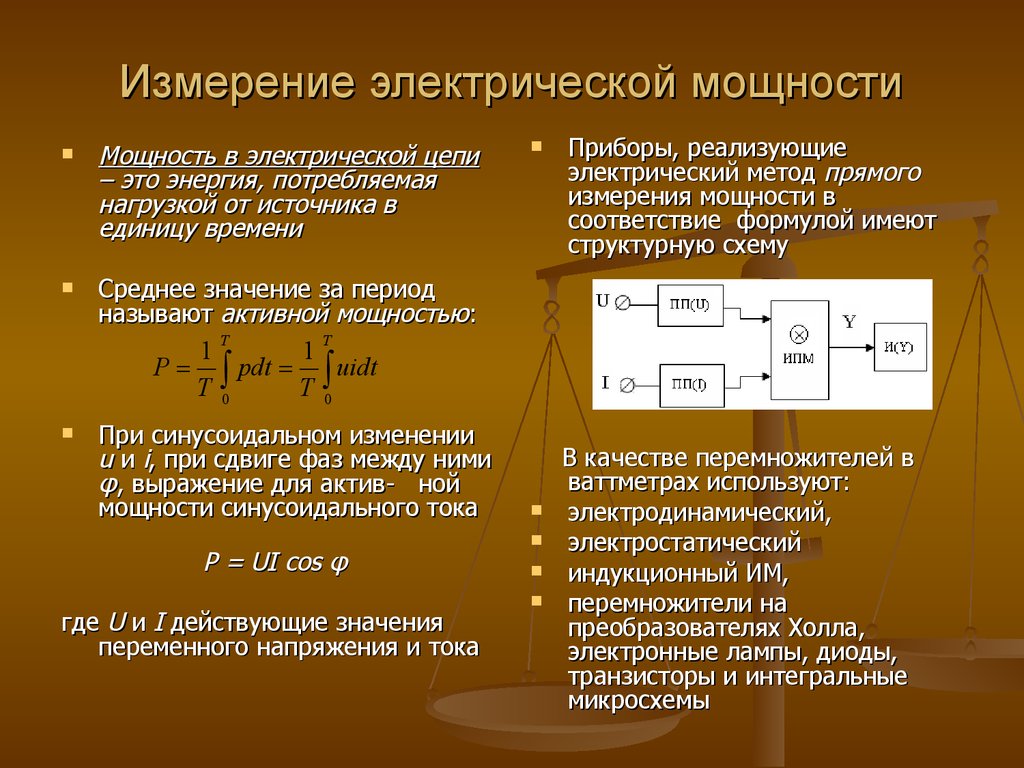
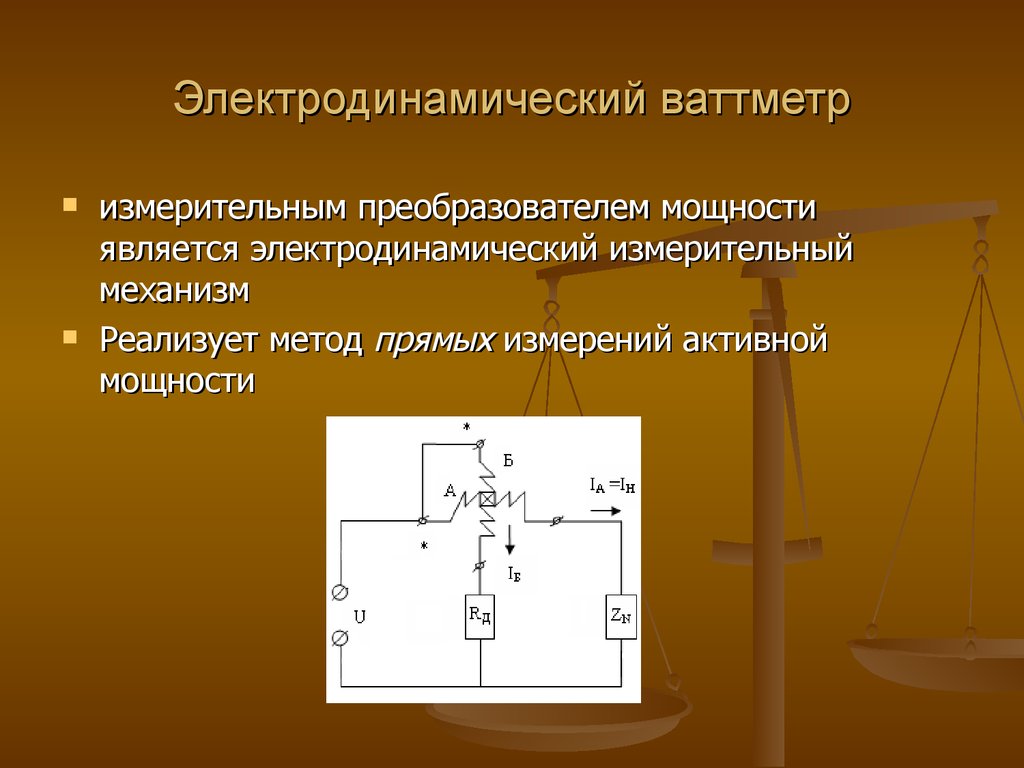
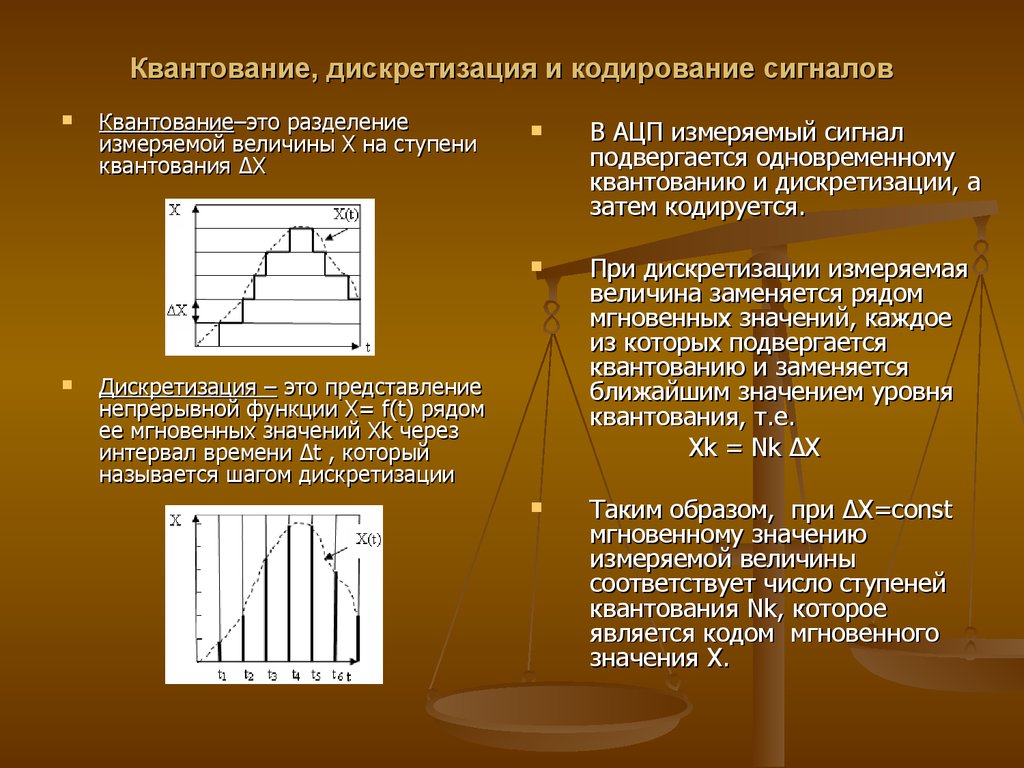
Z3 φ1+ φ4 = φ2+ φ3 Z1, Z2, Z3, Z4 – модули полных сопротивлений плеч, φ1, φ2 , φ3 , φ4 – углы фазового сдвига тока относительно напряжения Измерение электрической мощности Мощность в электрической цепи – это энергия, потребляемая нагрузкой от источника в единицу времени Среднее значение за период называют активной мощностью: При синусоидальном измененииu иi , при сдвиге фаз между нимиφ , выражение для актив- ной мощности синусоидального тока P = UI cos φ гдеUиI действующие значения переменного напряжения и тока Приборы, реализующие электрический метод прямого измерения мощности в соответствие формулой имеют структурную схему В качестве перемножителей в ваттметрах используют: электродинамический, электростатический индукционный ИМ, перемножители на преобразователях Холла, электронные лампы, диоды, транзисторы и интегральные микросхемыT uidtTpdtTP01 Электродинамический ваттметр измерительным преобразователем мощности является электродинамический измерительный механизм Реализует метод прямых измерений активной мощности Модуляционный ваттметр Принцип действия : аналоговые входные сигналы преобразуются Uu (сигнал пропорциональный напряжению на нагрузке) в амплитуду импульсов Ui (сигнал пропорциональный току в нагрузке) в длительность импульсов Площадь каждого из импульсов на выходе АМ пропорциональна мгновенной мощности при условии, что изменениемUi иUu за период T0 можно пренебречь s(t)= Uu(t) ti(t)= k Uu(t) Ui(t) Интегрирование (И - интегратор) напряжения на выходе АМ дает среднее за период входных сигналов значение мощности Структурная схема и временные диаграммы Квантование, дискретизация и кодирование сигналов Квантование –это разделение измеряемой величины Х на ступени квантования ΔХ Дискретизация – это представление непрерывной функцииX=f(t ) рядом ее мгновенных значенийXk через интервал времениΔt , который называется шагом дискретизации В АЦП измеряемый сигнал подвергается одновременному квантованию и дискретизации, а затем кодируется.
При дискретизации измеряемая величина заменяется рядом мгновенных значений, каждое из которых подвергается квантованию и заменяется ближайшим значением уровня квантования, т.е.Xk = Nk ΔX Таким образом, приΔX= const мгновенному значению измеряемой величины соответствует число ступеней квантованияNk , которое является кодом мгновенного значенияX.
Времяимпульсный метод преобразования основан на преобразовании измеряемой величины в пропорциональный интервал времени, в течение которого на счетчик поступают импульсы строго стабильной частоты, так что число импульсов, сосчитанных за этот интервал времени, оказывается пропорциональным значению измеряемой величины Tx= αU0 (б)= αUx (б) Nx =f0 Tx Nx = αf0Ux в данном случае код, которым является число импульсов Nx, пропорционален Ux.
Кодоимпульсный метод преобразования Основан на сравнении измеряемой величины, например, напряжения Ux, с образцовым компенсирующим напряжением Uk, изменяющимся скачкообразно по определенному закону Этот метод может быть реализован двумя способами.
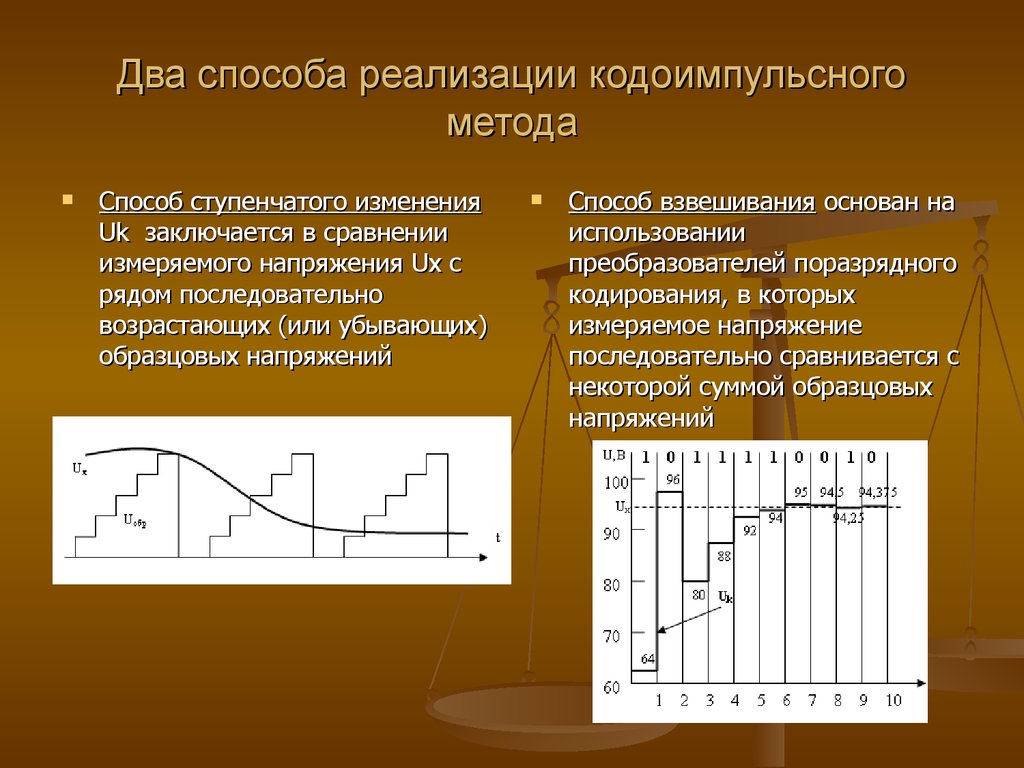
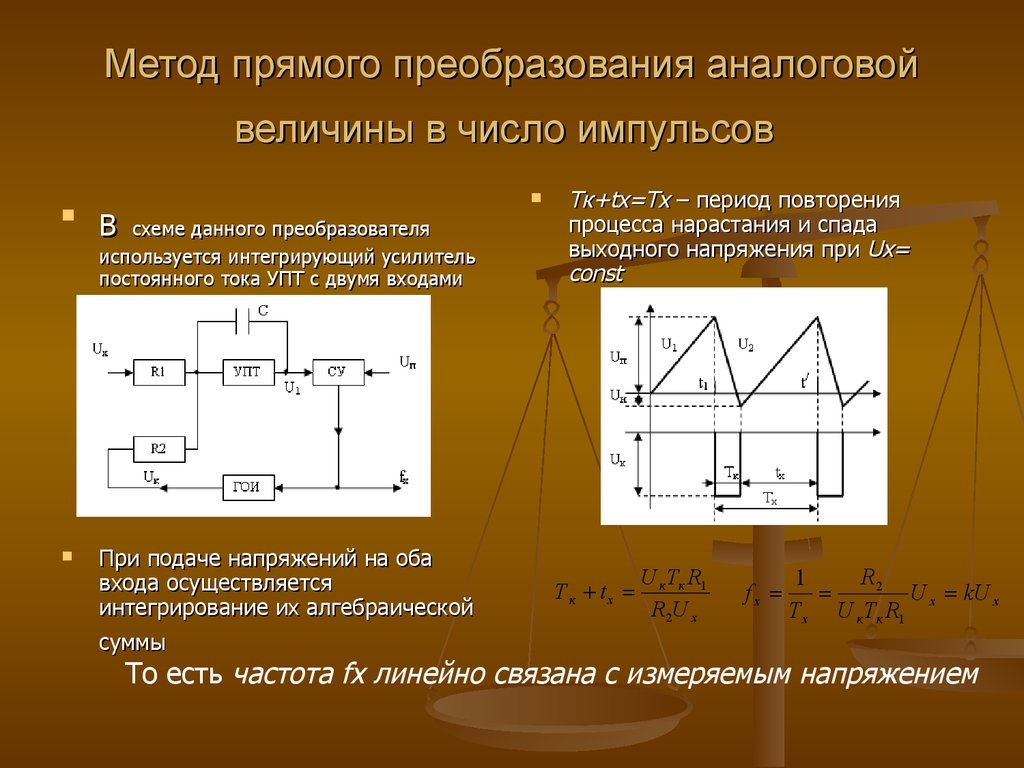
Два способа реализации кодоимпульсного метода Способ ступенчатого измененияUk заключается в сравнении измеряемого напряженияUx с рядом последовательно возрастающих (или убывающих) образцовых напряжений Способ взвешивания основан на использовании преобразователей поразрядного кодирования, в которых измеряемое напряжение последовательно сравнивается с некоторой суммой образцовых напряжений Метод прямого преобразования аналоговой величины в число импульсов В схеме данного преобразователя используется интегрирующий усилитель постоянного тока УПТ с двумя входами При подаче напряжений на оба входа осуществляется интегрирование их алгебраической суммы Тк+t х=Тх – период повторения процесса нарастания и спада выходного напряжения приUх= constxкxкURTUtТ21 xкxkUURTURTf121
Совокупными называют проводимые одновременно измерения нескольких одноименных величин , при этом искомые значения каждой из величин находят решением системы уравнений, получаемых по результатам прямых измерениях различных сочетаний этих величин Совместными называют проводимые одновременно измерения 2-х или нескольких не одноименных величин для нахождения зависимости между ними.
Методы прямых измерений Методы непосредственной оценки – это методы, при которых значение величины определяют непосредственно по отсчетному устройству измерительного прибора прямого действия Методы сравнения с мерой – это методы, основанные на сравнении измеряемой величины с величиной, воспроизводимой мерой В зависимости от способа сравнения различают1.
дифференциальный метод2.
нулевой метод3.
метод замещения Физические величины и единицы измерения Физическими величинами называют измеряемые характеристики физических объектов Основных величин 7 : длина (L) , время (T ), масса (M), температура (, T ), сила тока (I ), количество вещества (N) и сила света ( J, I) Для обозначения однородных величин вводят понятие размерности Например, dim G = L – величина G имеет размерность длины dim v = длина.
время-1 =L.
T-1 Для осуществления измерений физических величин установлены соответствующие единицы измерения В СИ семь основных единиц : метр (м), килограмм (кг), секунда (с), Ампер (А), Кельвин (К), моль (моль), кандела (кд) Все остальные единицы СИ являются производными от основных и представляют собой произведения степеней основных единиц, не содержащие численных коэффициентов.
Например, единица СИ магнитной индукции: [B]=В.с.м-2 =Тл Объект измерения Прибор ППEq Объект измерения Прибор ППEqE0 Объект измерения Прибор ППEqE0 генераторные параметрические радиационные Первичные преобразователи информации (ППИ) Датчики Активные Пассивные Первичные преобразователи информации (ППИ) преобразование измеряемой величины в электрический сигнал выходной электрический сигнал по R, L, C Использование физических эффектов для построения активных датчиков напряжение эффект Холла перемещение напряжение электромагнитная индукция скорость заряд пьезоэлектрический эффект сила, давление, ускорение, вибрация ток, заряд, напряжение пироэлектрический эффект, фотоэффект поток оптического излучения напряжение термоэлектрический эффект температура Выходной сигнал Используемый эффект Измеряемая величина Первичные преобразователи информации (ППИ) ДатчикиT1T2e Термо ЭДСU Пироэлектрический эффектU() Фотоэлектрический эффектUF Пьезоэлектрический эффект Первичные преобразователи информации (ППИ) Датчикиe() С использованием электромагнитной индукцииJB U(x) На эффекте Холла Первичные преобразователи информации (ППИ) Пассивные датчики Жидкие изоляционные материалы.
Диэлектрическая проницаемость Уровень Хлористый литий, окись алюминия, полимеры.
Сопротивление, диэлектрическая проницаемость Влажность Ферромагнитные сплавы;
резистивные материалы: висмут, антимонит индия.
Магнитная проницаемость, сопротивление Перемещение Сплавы Ni;
легированный Al Сопротивление Деформация Полупроводники.
Сопротивление Поток оптического излучения Стекло, керамика Диэлектрическая проницаемость Сверхнизкие температуры Me (платина, Ni, Cu), полупроводники.
Сопротивление Температура Тип используемых материалов Электричесая характеристика от входного воздействия Измеряемая величина О погрешностях измерения Погрешность это отклонение результата измерения от истинного значения измеряемой величины По форме погрешности делят на абсолютнуюи относительную Δ = А - А ист По источникам погрешности делят на инструментальную, методическуюи субъективную По характеру погрешности делят на систематическую и случайную%100дA СРЕДСТВА ИЗМЕРЕНИЙ СИ – это технические устройства, используемые при измерениях и имеющие нормированные метрологические характеристики Средства измерений Эталоны Меры Измерительные преобразователи Измерительная установка Измерительные информационные системы Измерительно- вычислительные комплексы аналоговые АЦП Преобразователи код-код ЦАП Статические характеристики и параметры СИ Уравнением преобразования называют однозначную функциональную зависимость между выходной величиной -y и входной величиной -х, которая может быть выражена аналитически – y=f(x) или графически Чувствительность СИ определяет скорость изменения выходной величины при изменении входной Порогом чувствительности СИ называют изменение входной величины, вызывающее наименьшее изменение выходной величины, которое может быть обнаружено с помощью данного СИ без каких-либо дополнительных устройств Область значений между верхним и нижним пределами определяет диапазон измерений Погрешность средства измерения разделяют на основную погрешность и дополнительную погрешность Входное сопротивление Выходное сопротивление Время успокоения прибора – промежуток времени с момента включения измеряемой величины до момента, когда указатель отсчетного устройства не будет удаляться от установившегося отклонения более, чем на 1% длины шкалы Время измерения- время, необходимое для обработки входного сигнала и его индикации Динамические характеристики и параметры СИ Уравнение преобразования, чувствительность, погрешность связаны с амплитудой и частотой входного сигнала Динамической чувствительностью преобразователя является функция, представляющая собой отношение мгновенных значений выходной и входной величин Идеальный преобразователь осуществляет заданное преобразование без искажений Реальные преобразователи (СИ) обладают инерционными или динамическими свойствами преобразователи Безинерционные s ≠ f(ω) инерционные дифференцирующие s ~ ω интегрирующие s ~ 1/ω Свойства дифференцирующего преобразователя Для дифференцирующего преобразователя выходная величина пропорциональна производной от входной величины( уравнение преобразования )dtdxSy вх вых0 Синусоидальный сигнал на входе дифференцирующего преобразователя Динамическая чувствительность (АЧХ) дифференцирующего преобразователя линейно зависит от частоты входного сигнала Выходной сигнал дифференцирующего преобразователя на 900 опережает входной (фазовая характеристика) Свойства реального дифференцирующего преобразователя Пример: дифференцирующая цепь уравнение преобразования: дифференциальное уравнение 1-го порядкаdtdxSydtdy вх вых0 Синусоидальный сигнал на входе реального дифференцирующего преобразователя20)(1 SXYS вх вых 1 arctg на низких частотах (при 1) его чувствительность (сплошная кривая) становится пропорциональной частоте, т.е.
он приближается к идеальному дифференцирующему преобразователю;
на высоких частотах (при 1) его чувствительность (пунктирная кривая) не зависит от частоты, т.е.
он ведет себя как безинерционный преобразователь.
АЧХ ФЧХ Погрешность реального дифференцирующего преобразователя Под динамической погрешностью преобразователя понимают разность между динамической чувствительностью реального преобразователя и динамической чувствительностью идеального преобразователя, т.е.
осуществляющего данное преобразование без искажений амплитудно-частотную погрешность реального дифференцирующего преобразователя зависит от частоты- отрицательна и возрастает по абсолютной величине с увеличением частоты уменьшение частотной погрешности при заданной частоте возможно за счет снижения постоянной времени преобразователя2020)(1)(1)(1 Sир Свойства интегрирующего преобразователя Сигнал на выходе интегрирующего преобразователя пропорционален интегралу от входного.
Уравнение преобразования в интегральной и дифференциальной форме имеет вид:dtxSy вх вых0 вх выхxSdtdy0 Синусоидальный сигнал на входе интегрирующего преобразователя Амплитудно- частотная характеристика интегрирующего преобразователя обратно пропорциональна частоте входного сигнала Фазовая характеристика не зависит от частоты входного сигнала и характеризует отставание выходной величины от входной на угол π/2 0SXYS вх вых = arctg (-∞)= –π/2 Свойства реального интегрирующего преобразователя Пример: пассивная интегрирующая RC-цепь Уравнение преобразования реального интегрирующего преобразователя, который получил также название апериодического или инерционного звена первого порядка вх выхxSydtdy0 Синусоидальный сигнал на входе реального интегрирующего преобразователя АЧХ: ФЧХ: безразмерная чувствительность реального интегрирующего преобразователя уменьшается почти обратно пропорционально ωτ (сплошная кривая)и близка по характеру к зависимости для идеального интегрирующего преобразователя.
При ωτ>>1 преобразователь приближается к идеальному интегрирующему преобразователю, при ωτ<<1– к безинерционному.
Фазовая характеристика , т.е.
угол сдвига фаз между выходным и входным сигналами, нарастает с увеличением частоты и асимптотически стремится к –π/2.20)(1 SXYS вх вых)(ReIm arctgS arctg Погрешность реального дифференцирующего преобразователя (синусоидальный сигнал на входе) Под динамической погрешностью преобразователя понимают разность между динамической чувствительностью реального преобразователя и динамической чувствительностью идеального преобразователя, т.е.
осуществляющего данное преобразование без искажений Видно, что погрешность интегрирования всюду отрицательна и резко стремится к нулю при росте ω, точнее ωτ.
погрешность интегрирующего преобразователя будет тем меньше, чем больше постоянная времениτ и чем больше частотаω (тогда как для дифференци-рующего преобразователя, данные для которого для сравнения приведены на этом же рисунке, погрешность падает с уменьшениемτиω).2020)(1)(1)(1 Sир Свойства колебательного преобразователя К колебательным преобразователям относятся механические, акустические, гидравлические, электрические системы , в которых имеются обобщенныемасса, успокоение и жесткость, взаимосвязанные дифференциальным уравнением 2-го порядка вх выхxmSydtdyhdtyd0202 mPhmcT02 Гармонический сигнал на входе колебательного преобразователя Амплитудная частотная характеристика Фазовая характеристика - относительная частота - степень успокоения2020)2()1(1)2()1( ScScS12 arctg002h Безразмерные частотные характеристики колебательного преобразователя при различных значениях степени успокоенияβ.
наиболее равномерный вид имеет частотная характеристика при степени успокоения β=0,6-0,7;
при β ≥1/√2 = 0.707 характеристика не имеет подъема;
максимальное значение чувствительности при резонансной частоте ωрез и заданных S0 и С0 зависит только от степени успокоения β.
резонансная частота, найденная из условия экстремума АЧХ, зависит от степени успокоения и отличается от собственной частоты ω0:2021 рез Фазовые характеристики колебательного преобразователя при различных значениях степени успокоенияβ при частоте равной частоте собственных колебаний преобразователя ω0 , угол сдвига фаз между входной и выходной величинами составляет 900 и не зависит от степени успокоения системы;
при небольших степенях успокоения и частотах вблизи ω0 сдвиг по фазе между входной и выходной величинами может почти скачком достигать значений в 1800;
при степени успокоения β=0,65- 0,7 и при работе в диапазоне частот от 0 до η=0,65-0,7 фазовые характеристики можно приближенно рассматривать как прямые, выходящие из начала координат (η=0, α=0), т.е.
α=kω.
Погрешности колебательного преобразователя при синусоидальном сигнале на входе Погрешность зависит от степени успокоения в системе Выделяются три крайних случая =0, т.е.
успокоение отсутствует =1, критическое успокоение =0,707=2/2,1)2()1(12 ирS2121 12 Погрешность колебательного преобразователя при разных степенях успокоения =0 1 ( 0) погрешность быстро возрастает;
=1 (= 0) погрешность ;
1 ( 0) погрешность становится отрицательной и быстро увеличивается по абсолютной величине.
=1 Видно, что погрешность при всех частотах отрицательна и быстро возрастает с ростом частоты.
=0,707=2/2 погрешность также всюду остается отрицательной, но возрастает значительно медленнее, чем при=1 Для =0,6, то видно, что с изменением частоты погрешность изменяется наиболее благоприятно Электродинамический измерительный механизм Принцип действия электродинамического ИМ основан на взаимодействии магнитных потоков, созданных токами двух катушек: подвижной катушки 1, закрепленной на оси вращения с возвратными пружинами (Рис.
1, слева вверху указано обозначение данного ИМ);
неподвижной катушки 2, состоящей из двух частей, между которыми проходит ось подвижной катушки;
Уравнение преобразования на постоянном токе11221221IMkIMIk Уравнение преобразования электродинамического ИМ на переменном токеcos12112IMk
• Отклонение подвижной части измерительного механизма электродинамической системы обусловлено действием токов двух катушек, одна из которых неподвижна, другая – подвижна.
• Возможность использования ИМ в цепях постоянного и в цепях переменного тока.
• Измерительный механизм обладает перемножающим свойством двух величин (токов и напряжений).
• Измерительный механизм, благодаря чувствительности к внешним магнитным полям, требует экранирования.
Магнитоэлектрический измерительный механизм В магнитоэлектрическом механизме вращающий момент возникает в результате взаимодействия тока в катушке и магнитного поля постоянного магнита Уравнение преобразования магнитоэлектрический ИМ обладает большой чувствительностью малым собственным потреблением мощности мало подвержен влиянию внешних магнитных полей имеет прямо пропорциональную зависимость между углом отклонения и током в рамкеIkBSw Электромагнитный измерительный механизм Вращающий момент в электромагнитном ИМ возникает в результате взаимодействия ферромагнитного сердечника подвижной части механизма и магнитного поля плоской катушки с током уравнение преобразования ИМ на постоянном токе : уравнение на переменном токе имеет тот же вид, что и на постоянном, только теперь фигурирует действующее значение тока в катушкеLIk21 Электростатический измерительный механизм Вращающий момент в электростатических механизмах возникает в результате взаимодействия двух систем заряженных проводников, одна из которых является подвижной Уравнение преобразования на постоянном токе При синусоидальном переменном токе уравнение преобразования имеет тот же вид, что и на постоянном токе, с заменой постоянного напряженияU на действующее значениеUд21UCk Свойства электростатического ИМ Видно, что угол поворота электростатического механизма от измеряемого напряжения зависит нелинейно.
Линейную зависимость получают путем изготовления пластин специальной формы, при которой является требуемой функцией от угла α.
Электростатический механизм имеет малое собственное потребление мощности от измеряемой цепи (на постоянном токе потребление равно нулю).
На результат измерения малое влияние оказывают температура окружающей среды, частота и форма измеряемого напряжения.
Отсутствует влияние магнитных полей, но влияют внешние электростатические поля, для защиты от которых используют металлические экраны.
Масштабные преобразователи Добавочный резистор и шунт Резистор, включенный последовательно с ИМ, вращающий момент которого зависит от тока, и используемый для измерения напряжения, называется добавочным резистором Резистор, включенный параллельно с ИМ, вращающий момент которого зависит от тока, называется шунтом.
ИМ, например, магнитоэлектрический Делители напряжения на постоянном токе Делители напряжения предназначены для получения определенного соотношения между входным напряжением U1 и выходным напряжением U2 при U2< U1.
Простейший резисторный делитель не нагруженК оэффициент преобразования резисторный делитель нагружен сопротивлением Rн, с которого и снимается напряжение Коэффициент преобразования в этом случае21212121RUS нRS21 Делители напряжения на переменном токе На переменном токе в общем случае коэффициент преобразования является комплексной величиной Z1, Z2 - полные комплексные сопротивления соответствующих участков делителя.
на переменном токе между напряжениямиU1 иU2 появляется угол сдвига, который является угловой погрешностью делителя.
Простейший конденсаторный делитель в пределе высоких частот пределе низких частот R1, R2 –сопротивления изоляции конденсаторов2121ZUS 21CSC 212RSR Измерительные трансформаторы переменного тока и напряжения Измерительные трансформаторы тока и напряжения применяют в качестве преобразователей больших переменных токов и напряжений в относительно малые величины, измерение которых возможно стандартными приборами с относительно небольшими пределами измерений.
Включение Номинальный коэффициент трансформацииK ном=w2/w1 Векторная диаграмма трансформатора тока Падения напряжения во вторичной цепи МДС в сердечнике Векторная диаграмма2IjXIRUн 2IjXIRU 2UEн 0121IwIwIw Выводы по диаграмме МДС оказывает размагничивающее действие на сердечник («–» в законе ЭМИ), т.к.
индукционный ток сдвинут по фазе по отношению к почти на1800 Вектор МДС , не совпадает по фазе с созданным им потоком .
Отставание потока на уголδ обусловлено наличием гистерезиса и вихревых токов в сердечнике (или другими словами потерями в сердечнике) Видно, что токи и не совпадают по фазе на угол δI, который, таким образом, определяет угловую погрешность преобразования Основные соотношения, полученные с помощью диаграммы Ток в первичной обмотке Действительный коэффициент трансформации Токовая погрешность Угловая погрешностьIwIwIOBwIcos) cos(cos201021 ) cos(202121 IwI) cos(2020121 IwIKI%100) cos(%10020210wIwIKI номI) cos() sin(20102010 wIwIwIOBBCtgI2010) sin(wIwI Из анализа полученных уравнений можно сделать следующие выводы: При возрастании сопротивления вторичной обмотки или ее разрыве (I2 =0) происходит возрастание МДС I0w1 до I1W1 , это в свою очередь вызывает резкое увеличение потокаФ0, сопровождающееся а) ростом потерь в сердечнике и его перегрев, б)ростом ЭДСЕ2 , что может вызвать аварийную ситуацию пробоя Увеличение сопротивления нагрузки вторичной цепи, например, за счет включения большого числа приборов, приводит к ростуI0 и тем самым к росту токовой и угловой погрешностей.I0 будет тем меньше, чем выше магнитная проницаемость сердечника и чем меньше магнитные потери, а также при уменьшении индукции до ~0,05-0,15 Тл Увеличение индуктивного сопротивления нагрузки приводит к увеличению углаψ2 и следовательно к увеличению токовой погрешности (растет значение косинуса) и уменьшению угловой погрешности (значение синуса уменьшается) Измерительные выпрямители Неуправляемые измерительные выпрямители среднего значения однополупериодный (a) и двухполупериодный (б) Отсчет по ИМ пропорционален среднему значению переменного тока, чувствительность второй схемы в два раза выше, чем первой а) б) срTmTISIStdtITSidtTS/202sin2121 срTISSIidtTS/021 Измерительные выпрямители максимального значения Если постоянная времениRн С>>T , гдеТ период напряженияUx , то наRн всегда будет напряжение U–~Um и данный выпрямитель можно использовать для измерения максимального значения переменного напряжения Управляемые измерительные выпрямители Электромеханический выпрямитель может замыкать контакт А цепи измеряемого напряженияUx на время равное половине периода управляющего напряжения Uу При совпадении фаз обоих напряжений– ψ=00 При ψ=900I–=0.
При произвольном значении ψ срTmTItdtITidtTI21sin212120cos21sin21212 срTtmTtItdtITidtTIc Компенсаторы постоянного тока – потенциометры В потенциометрах осуществляется непосредственное сравнение измеряемого напряжения Ux (или ЭДС) с известным падением напряжения Uк на образцовом сопротивлении Rк В результате сравнения измеряемое напряжение определяется как: Ux= Uк= Iр Rк гдеRкиIр это известное сопротивление компенсатора и ток в немIР= EN/ RУ Функциональная схема компенсатора Компенсаторы переменного тока – потенциометры Принцип действия компенсаторов переменного тока заключается в том, что измеряемое напряжение Ux или ЭДС уравновешиваются известным напряжением, создаваемым рабочим током на участке рабочей цепи, питаемой напряжением U.
Для уравновешивания двух напряжений переменного тока необходимо соблюдение следующих условий: равенство напряжений по модулю;
противоположность по фазе;
равенство частот;
идентичность формы кривой напряжений.
Функциональная схема прямоугольно-координатного компенсатора (потенциометра) Мосты постоянного тока схема одинарного моста Условие равновесия мостаR1R4 = R2 R3 Измеряемое сопротивление схема двойного моста моста Измеряемое сопротивление Измерение сопротивлений с помощью мостов осуществляет-ся с погрешностью 0,001-0,005 %.432Rx 43210430421RrRrRNx Уравновешенные мосты переменного тока Мосты переменного тока применяют для измерения емкости, индуктивности, взаимной индуктивности, добротности и угла потерь для электроизоляционных материалов при равновесии моста переменного тока произведения комплексных сопротивлений противолежащих плеч равны друг другу Z1, Z2, Z3, Z4 полные комплексные сопротивления плеч мостаZ1.
Z4 = Z2.
Z3 Отличительная особенность мостов переменного тока Из равенства двух комплексных чисел следует, что должны быть равны их реальные (вещественные) и мнимые части: r1 r4 - X1 X4 = r2 r3 - X2 X3 r1 X4 + r4 X1 = r2 X3 + r3 X2 1) два независимых уравнения позволяют определить мостом переменного тока одновременно две независимые величины;
2) для достижения равновесия моста переменного тока необходимо регулировать не менее двух параметров , входящих в уравнения равновесия Из показательной формы представления комплексных величин условия равновесия конкретизируютсяZ1.
Z4 = Z2.
Z3 φ1+ φ4 = φ2+ φ3 Z1, Z2, Z3, Z4 – модули полных сопротивлений плеч, φ1, φ2 , φ3 , φ4 – углы фазового сдвига тока относительно напряжения Измерение электрической мощности Мощность в электрической цепи – это энергия, потребляемая нагрузкой от источника в единицу времени Среднее значение за период называют активной мощностью: При синусоидальном измененииu иi , при сдвиге фаз между нимиφ , выражение для актив- ной мощности синусоидального тока P = UI cos φ гдеUиI действующие значения переменного напряжения и тока Приборы, реализующие электрический метод прямого измерения мощности в соответствие формулой имеют структурную схему В качестве перемножителей в ваттметрах используют: электродинамический, электростатический индукционный ИМ, перемножители на преобразователях Холла, электронные лампы, диоды, транзисторы и интегральные микросхемыT uidtTpdtTP01 Электродинамический ваттметр измерительным преобразователем мощности является электродинамический измерительный механизм Реализует метод прямых измерений активной мощности Модуляционный ваттметр Принцип действия : аналоговые входные сигналы преобразуются Uu (сигнал пропорциональный напряжению на нагрузке) в амплитуду импульсов Ui (сигнал пропорциональный току в нагрузке) в длительность импульсов Площадь каждого из импульсов на выходе АМ пропорциональна мгновенной мощности при условии, что изменениемUi иUu за период T0 можно пренебречь s(t)= Uu(t) ti(t)= k Uu(t) Ui(t) Интегрирование (И - интегратор) напряжения на выходе АМ дает среднее за период входных сигналов значение мощности Структурная схема и временные диаграммы Квантование, дискретизация и кодирование сигналов Квантование –это разделение измеряемой величины Х на ступени квантования ΔХ Дискретизация – это представление непрерывной функцииX=f(t ) рядом ее мгновенных значенийXk через интервал времениΔt , который называется шагом дискретизации В АЦП измеряемый сигнал подвергается одновременному квантованию и дискретизации, а затем кодируется.
При дискретизации измеряемая величина заменяется рядом мгновенных значений, каждое из которых подвергается квантованию и заменяется ближайшим значением уровня квантования, т.е.Xk = Nk ΔX Таким образом, приΔX= const мгновенному значению измеряемой величины соответствует число ступеней квантованияNk , которое является кодом мгновенного значенияX.
Времяимпульсный метод преобразования основан на преобразовании измеряемой величины в пропорциональный интервал времени, в течение которого на счетчик поступают импульсы строго стабильной частоты, так что число импульсов, сосчитанных за этот интервал времени, оказывается пропорциональным значению измеряемой величины Tx= αU0 (б)= αUx (б) Nx =f0 Tx Nx = αf0Ux в данном случае код, которым является число импульсов Nx, пропорционален Ux.
Кодоимпульсный метод преобразования Основан на сравнении измеряемой величины, например, напряжения Ux, с образцовым компенсирующим напряжением Uk, изменяющимся скачкообразно по определенному закону Этот метод может быть реализован двумя способами.
Два способа реализации кодоимпульсного метода Способ ступенчатого измененияUk заключается в сравнении измеряемого напряженияUx с рядом последовательно возрастающих (или убывающих) образцовых напряжений Способ взвешивания основан на использовании преобразователей поразрядного кодирования, в которых измеряемое напряжение последовательно сравнивается с некоторой суммой образцовых напряжений Метод прямого преобразования аналоговой величины в число импульсов В схеме данного преобразователя используется интегрирующий усилитель постоянного тока УПТ с двумя входами При подаче напряжений на оба входа осуществляется интегрирование их алгебраической суммы Тк+t х=Тх – период повторения процесса нарастания и спада выходного напряжения приUх= constxкxкURTUtТ21 xкxkUURTURTf121