

 Физика
ФизикаПохожие презентации:







. Лекция 5")


Основные понятия и общие принципы построения автоматических систем
1.
департамент «Энергетика, металлургия иинформационные технологии»
Слайд-лекция по дисциплине:
«Автоматизация металлургического
производства»
Лекция 2: Основные понятия и общие
принципы построения автоматических систем.
Для студентов специальности 5В070900
«Металлургия»
Разработала: старший преподаватель, магистр
Шупеева Ш.М.
2.
Лекция 2. Основные понятия и общиепринципы построения автоматических
систем.
План лекции:
1. Системы автоматического управления.
2. Элементы САУ
3. Звено и его входные и выходные воздействия.
3.
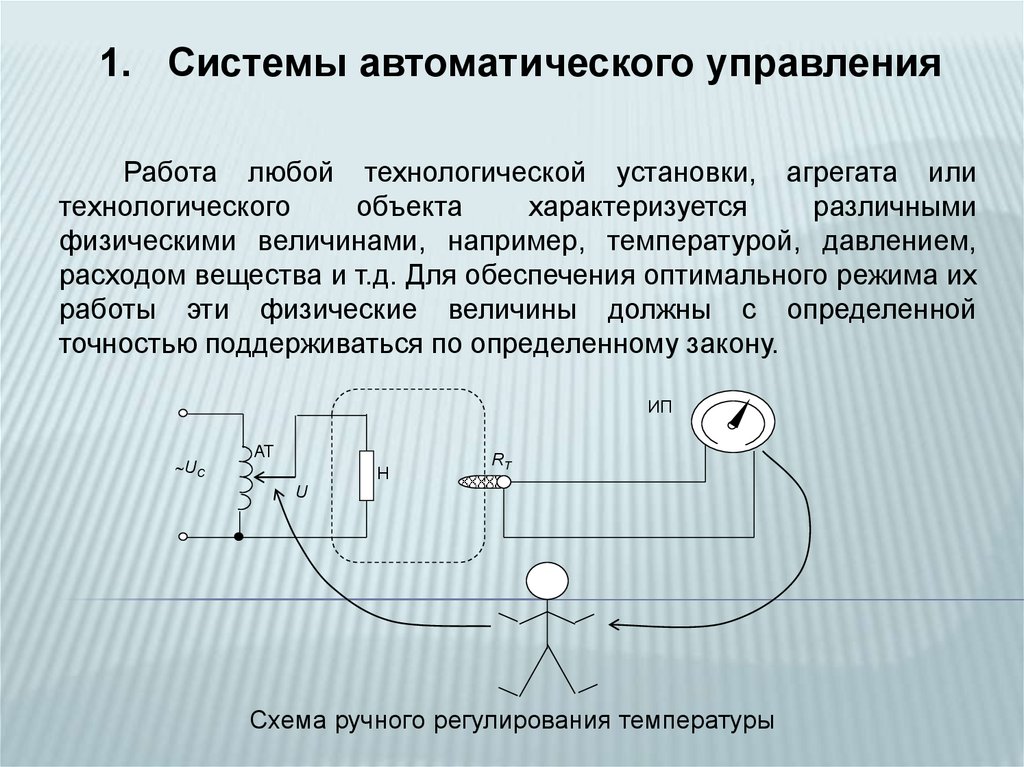
1. Системы автоматического управленияРабота любой технологической установки, агрегата или
технологического
объекта
характеризуется
различными
физическими величинами, например, температурой, давлением,
расходом вещества и т.д. Для обеспечения оптимального режима их
работы эти физические величины должны с определенной
точностью поддерживаться по определенному закону.
ИП
UС
АТ
Н
RТ
U
Схема ручного регулирования температуры
4.
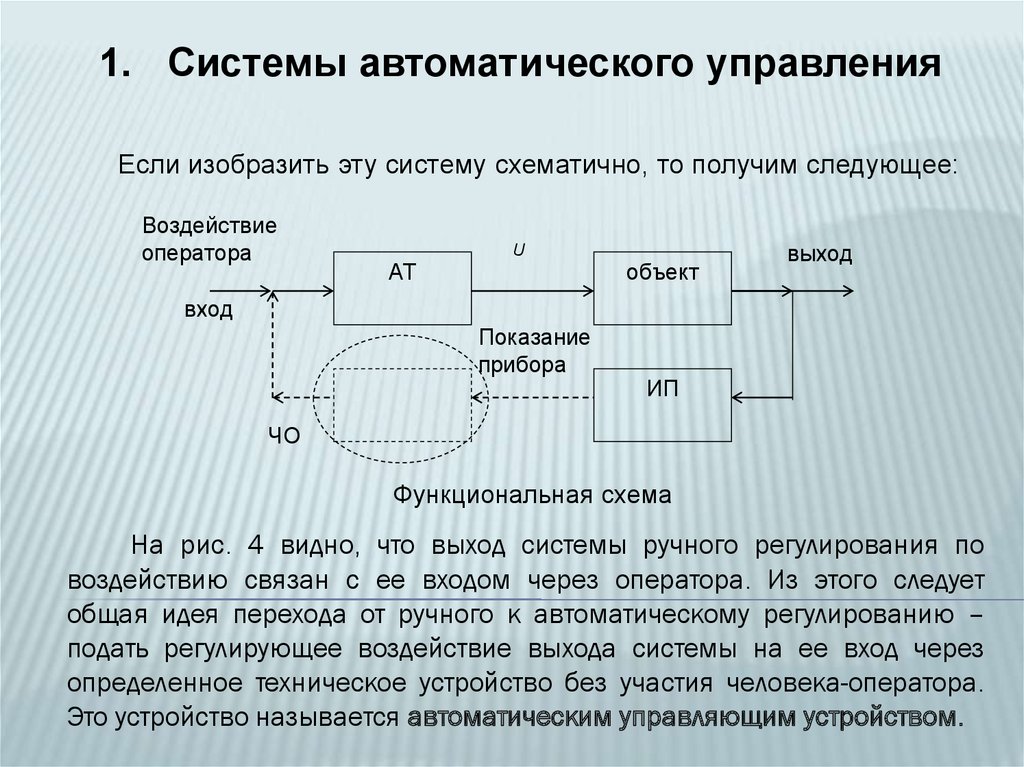
1. Системы автоматического управленияЕсли изобразить эту систему схематично, то получим следующее:
Воздействие
оператора
АТ
U
объект
выход
вход
Показание
прибора
ИП
ЧО
Функциональная схема
На рис. 4 видно, что выход системы ручного регулирования по
воздействию связан с ее входом через оператора. Из этого следует
общая идея перехода от ручного к автоматическому регулированию –
подать регулирующее воздействие выхода системы на ее вход через
определенное техническое устройство без участия человека-оператора.
Это устройство называется автоматическим управляющим устройством.
5.
1. Системы автоматического управленияСушильный шкаф является регулируемым (управляемым)
объектом. Устройство (технологическая установка или ее часть), в
котором должен поддерживаться нормальный режим работы за счет
воздействий извне, называется управляемым объектом (объект
управления).
Управляемый объект и автоматическое управляющее
устройство, взаимодействующие между собой, образуют в
совокупности автоматическую систему управления.
Параметры, которые необходимо поддерживать на заданном
уровне (температура) или изменять по определенному закону,
называются регулируемыми параметрами.
Процесс поддержания регулируемых параметров (величин),
происходящий
без
вмешательства
человека,
называется
автоматическим регулированием.
Процесс изменения регулируемых параметров (величин) по
определенному закону, происходящий без вмешательства человека,
называется автоматическим управлением.
6.
1. Системы автоматического управленияСистема, которая осуществляет поддержание регулируемых
параметров или их изменение по определенному закону без
непосредственного участия человека, называется системой
автоматического управления (САУ).
Схематичное изображение отдельных элементов системы в
виде прямоугольников и воздействий элементов друг на друга в
виде стрелок, а также воздействий, получаемых системой из
внешней среды, называется функциональной схемой системы.
Внутреннее
содержание
каждого
элемента
на
функциональной схеме не конкретизируется, а функциональное
значение обозначается условными буквенными символами. Под
функцией каждого элемента понимают как основные функции
автоматического
регулирующего
устройства
(получение
информации,
ее
переработка,
формирование
закона
регулирования и т.п.), так и более узкие (передача сигналов, их
сравнение, преобразование формы представления информации и
др.). Пути передачи воздействий между элементами САУ
изображаются линиями со стрелками в направлении передачи
воздействия.
7.
1. Системы автоматического управленияПри
исследованиях
и
расчетах
САУ
исходят
из
математического описания происходящих в них физических
процессов. Обычно это описание бывает представлено в виде
системы дифференциальных уравнений, которые выражают связь
между переменными величинами и их производными и определяют
сущность происходящих в системе процессов независимо от
принципов их действия, назначения и конструкции.
Для упрощения задачи нахождения дифференциального
уравнения АСР в целом исследуемую систему разбивают на
отдельные части – звенья направленного действия, которые,
обладают свойствами передачи сигнала только в одном
направлении (от входа к выходу) и в которых переходные процессы
описываются
достаточно
простыми
дифференциальными
уравнениями. Совокупность этих звеньев совместно с линиями
связи,
характеризующими
их
взаимодействие,
образует
структурную схему автоматической системы регулирования.
8.
1. Системы автоматического управленияТаким образом, структурной схемой САУ называется
графическое представление математической модели системы в
соединении звеньев, в которой каждой математической операции
преобразования сигнала соответствует определенное звено,
условно обозначаемое в виде прямоугольника с указанием
входных и выходных величин, а также уравнения или
передаточной функции этого звена. Уравнение (передаточную
функцию) записывают внутри или вне прямоугольника.
Общим между функциональными и структурными схемами
является то, что те и другие отражают процесс передачи и
переработки информации в контуре автоматической системы
регулирования. Однако между ними существует и четкое
различие: функциональные схемы дают характеристику системы
по составу входящих в нее элементов, которые рассматриваются
с точки зрения их назначения, т. е. выполняемых ими функций;
структурные схемы, состоящие из звеньев направленного
действия, математически описывают динамические свойства
системы.
9.
2. Элементы САУ1.
2.
3.
4.
5.
Все процессы управления и, в частности, регулирования имеют
общие закономерности, не зависящие от конкретных целей и объектов
управления.
Чтобы уяснить общие принципы управления, рассмотрим
несколько примеров. Проследим действия водителя за рулем
автомобиля. В процессе управления автомобилем можно выделить
следующие основные составляющие:
наблюдая за дорогой, водитель получает информацию о заданном
(требуемым) направлении движения. Этого не достаточно, он должен
также видеть, куда идет машина. Значит
водитель получает информацию
о фактическом
движении
автомобиля;
на основании полученной информации он определяет, в какую
сторону, и насколько отклонился автомобиль от заданного
направления;
по этому отклонению водитель решает, куда и насколько повернуть
руль, то есть определяет необходимое воздействие на автомобиль;
поворотом руля водитель изменяет направление движения
автомобиля.
10.
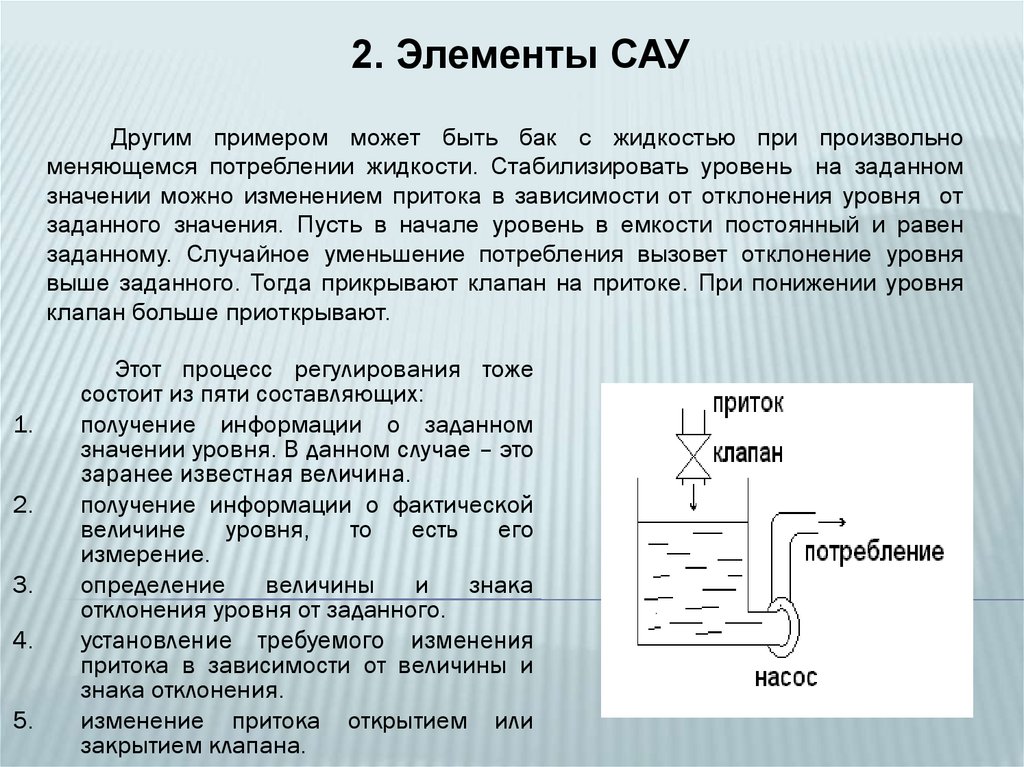
2. Элементы САУДругим примером может быть бак с жидкостью при произвольно
меняющемся потреблении жидкости. Стабилизировать уровень на заданном
значении можно изменением притока в зависимости от отклонения уровня от
заданного значения. Пусть в начале уровень в емкости постоянный и равен
заданному. Случайное уменьшение потребления вызовет отклонение уровня
выше заданного. Тогда прикрывают клапан на притоке. При понижении уровня
клапан больше приоткрывают.
1.
2.
3.
4.
5.
Этот процесс регулирования тоже
состоит из пяти составляющих:
получение информации о заданном
значении уровня. В данном случае – это
заранее известная величина.
получение информации о фактической
величине
уровня,
то
есть
его
измерение.
определение
величины
и
знака
отклонения уровня от заданного.
установление требуемого изменения
притока в зависимости от величины и
знака отклонения.
изменение притока открытием или
закрытием клапана.
11.
2. Элементы САУИз рассмотренных примеров видно, что для управления
любым объектом необходимо получить информацию о заданном и
фактическом его состоянии, определить отклонение фактического
состояния
от
заданного,
на
основе
этого
выработать
целенаправленное воздействие на объект и осуществить его.
Несмотря на большое разнообразие встречающихся в технике
объектов, отмеченный общий характер процессов управления не
зависит от физической природы объектов и ТС управления. Так,
например, действия любого водителя за рулем любой автомашины
носят в принципе одинаковый характер. Процесс регулирования
уровня в емкости так же не зависит от конфигурации емкости,
расположения трубопроводов и т.д. Это позволяет изучать
закономерности управления в общем, виде, независимо от природы
объектов управления и протекающих в них технологических
процессов.
12.
2. Элементы САУЛюбой процесс управления слагается из пяти основных
действий. В САУ эти действия выполняют технические устройства:
1. Устройство для установления заданного значения регулируемой
величины для объекта управления называется задатчиком.
2. Устройство для
получения информации о состоянии объекта
управления называется измерительным устройством.
3. Устройство, которое определяет отклонение измеренного значения
параметра от заданного, называется сумматором. Суммирующие
устройства на функциональных и структурных схемах изображают в
виде окружности, разделенной внутри на 4 равных сектора. Сектор,
на который подается величина с обратным (отрицательным) знаком,
затемняют или перед соответствующим входом ставят знак
«минус». Сумматор производит алгебраическое суммирование –
вычитание измеренного значения параметра из заданного.
13.
2. Элементы САУ4.
5.
Устройство, вырабатывающее необходимое воздействие на
объект, называется регулятором.
Для передачи этого воздействия на объект служит регулирующий
орган (РО). Обычно для перемещения РО применяется отдельное
устройство – исполнительный механизм.
Все эти устройства, а также объект управления являются
элементами САУ. В промышленных системах некоторые из
перечисленных устройств бывают конструктивно совмещены,
например, сумматор может быть частью регулятора, а
исполнительный механизм – объединен с РО.
14.
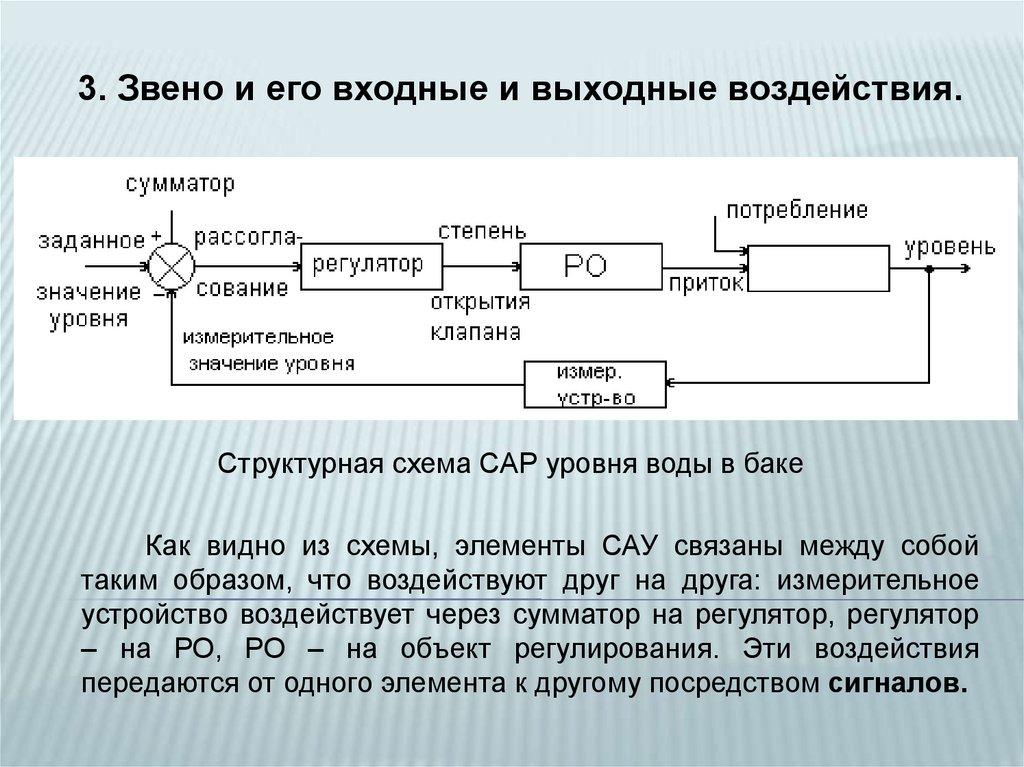
3. Звено и его входные и выходные воздействия.Структурная схема САР уровня воды в баке
Как видно из схемы, элементы САУ связаны между собой
таким образом, что воздействуют друг на друга: измерительное
устройство воздействует через сумматор на регулятор, регулятор
– на РО, РО – на объект регулирования. Эти воздействия
передаются от одного элемента к другому посредством сигналов.
15.
3. Звено и его входные и выходные воздействия.Физическая природа сигналов может быть различной:
электрической,
пневматической,
механический.
Так
в
рассматриваемом
случае
применима
механическая
связь
регулятора с измерительным устройством и РО. Общим свойством
любых сигналов является передача воздействия от одних
элементов системы к другим. Например, при регулировании
уровня в емкости РО воздействует на объект регулирования
изменением притока в емкость - здесь сигналом является расход
жидкости на притоке.
Передача воздействия от одного элемента к другому всегда
происходит в одном направлении: от предыдущего к последующему.
Поэтому
еще
одним
свойством
сигналов
является
их
однонаправленность.
Например,
температура
объекта
регулирования
определяет
сопротивление
термометра,
измеряющего эту температуру, но изменение его сопротивления не
влияет на температуру объекта; регулируемая величина
воздействует на измерительное устройство регулятора прямого
действия, а измерительное устройство на регулируемую величину
практически не влияет.
16.
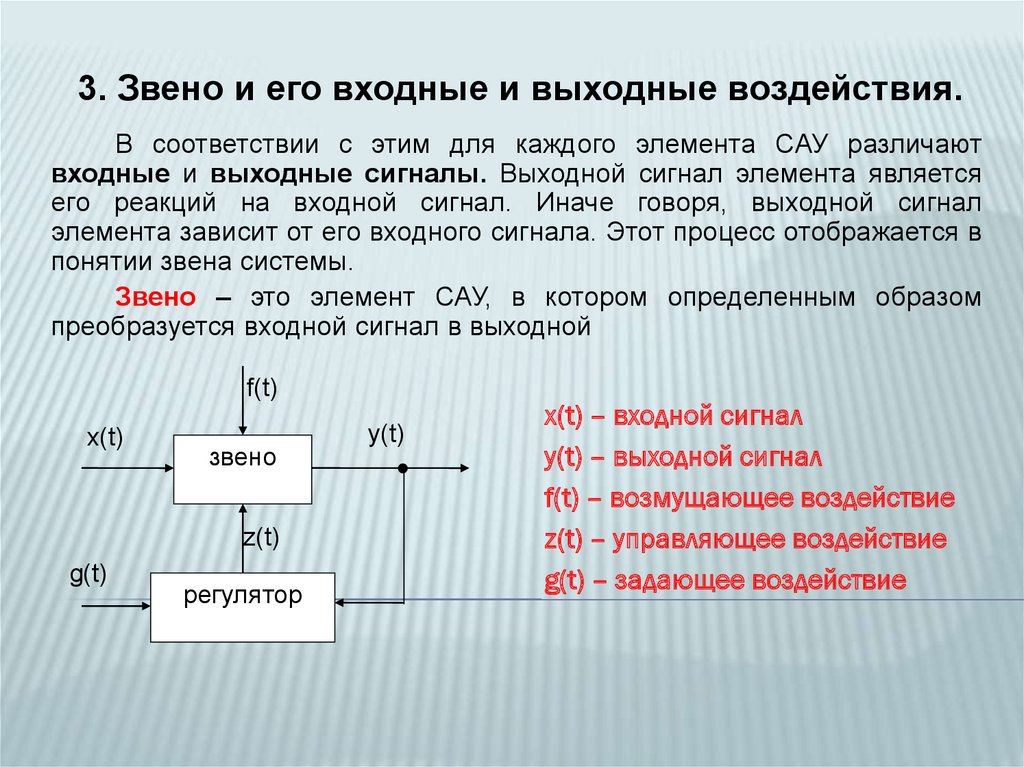
3. Звено и его входные и выходные воздействия.В соответствии с этим для каждого элемента САУ различают
входные и выходные сигналы. Выходной сигнал элемента является
его реакций на входной сигнал. Иначе говоря, выходной сигнал
элемента зависит от его входного сигнала. Этот процесс отображается в
понятии звена системы.
Звено – это элемент САУ, в котором определенным образом
преобразуется входной сигнал в выходной
f(t)
x(t)
звено
z(t)
g(t)
регулятор
y(t)
x(t) – входной сигнал
y(t) – выходной сигнал
f(t) – возмущающее воздействие
z(t) – управляющее воздействие
g(t) – задающее воздействие
17.
3. Звено и его входные и выходные воздействия.В общем случае элемент САУ может иметь несколько входных
и выходных сигналов. Например, для РО в САУ уровня в емкости
входной сигнал – степень открытия клапана, а выходной – расход
жидкости через него. Для самой емкости с жидкостью, как объекта
регулирования, входными сигналами являются расходы на притоке
и потреблении, а зависящий от этих сигналов уровень в емкости –
выходным сигналом.
Входные и выходные сигналы объектов регулирования могут
не совпадать с входными и выходными потоками вещества и
энергии. Так, в емкости приток является входным, а потребление –
выходным потоком.
Следует помнить, что в процессах управления конструкция
элементов, материалы, из которых они изготовлены, природа
входных и выходных сигналов не играют существенной роли в
процессах регулирования. Имеет лишь значение характер
преобразования входных сигналов в выходные.
18.
3. Звено и его входные и выходные воздействия.Внешними возмущающими воздействиями (возмущениями)
называют
воздействия,
стремящиеся
нарушить
требуемую
функциональную связь между задающим воздействием и регулируемой
величиной. Различают три вида внешних воздействий: нагрузка, настройки,
помехи.
Нагрузкой называют внешнее воздействие, приложенное к объекту
регулирования, не зависящее от регулятора, и от которой объект
принципиально не может быть защищен.
Настройкой называют возмущения, приложенные к каким-либо
элементам регулятора преднамеренно, с целью изменения значения
регулируемой координаты, поддерживаемой регулятором.
Помехами называют побочные внешние воздействия на отдельные
элементы регулятора или объекта регулирования, не требуемые для
нормальной работы системы, уменьшение или устранение которых
улучшает работу объекта.
Так, например, в автоматической системе регулирования питания
парового котла нагрузкой являются воздействия, возникающие в результате
изменения отбора
пара потребителем; воздействия на задатчик
регулятора для изменения поддерживаемого уровня – настройка;
воздействия, возникающие вследствие колебания напряжения питания
измерительного блока регулятора, – помеха.
19.
3. Звено и его входные и выходные воздействия.Под задающим воздействием понимают воздействие на
систему, определяющее требуемый закон изменения регулируемой
величины.
Точку приложения воздействий называют входом системы, а точку,
в которой наблюдается результат этого воздействия, - выходом
системы.
Воздействие выхода системы на ее вход называется главной
обратной связью (ГОС).
Обратные связи внутри системы являются дополнительными
(ДОС).
В системе с ГОС имеется замкнутый контур циркуляции
сигналов, поэтому такие системы называют замкнутыми САУ.
Соответственно, САУ без ГОС называют разомкнутыми.
20.
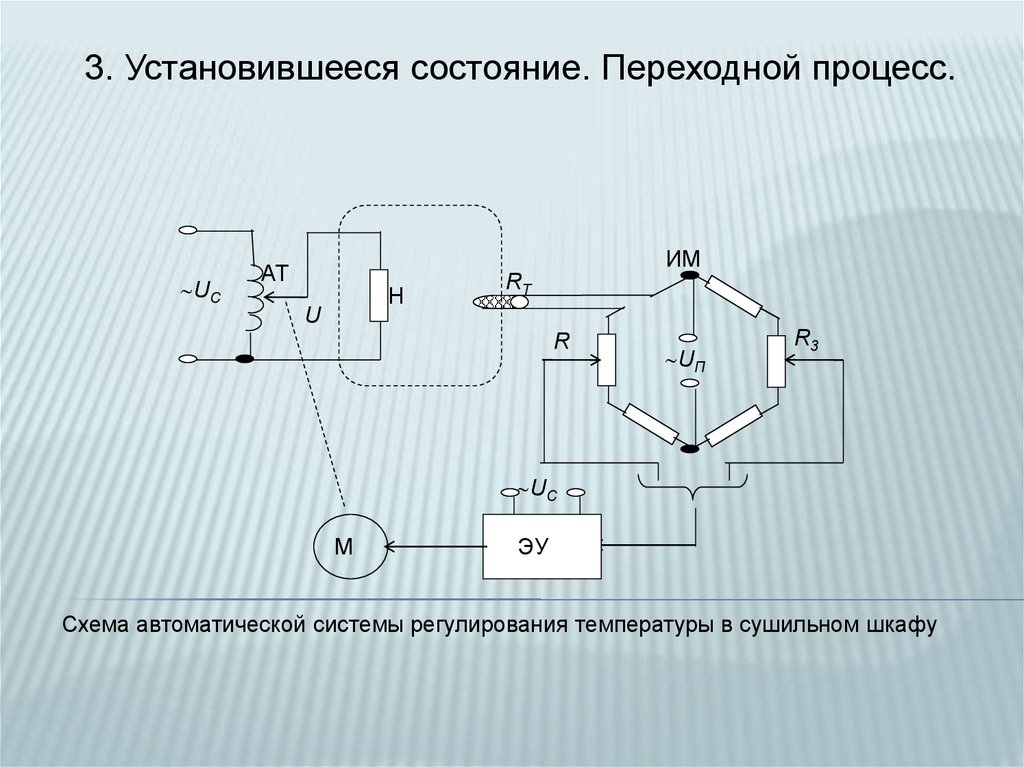
3. Установившееся состояние. Переходной процесс.UС
ИМ
АТ
Н
U
RТ
R
UП
R3
UС
М
ЭУ
Схема автоматической системы регулирования температуры в сушильном шкафу
21.
3. Установившееся состояние. Переходной процесс.Температура в сушильном шкафу измеряется термометром
сопротивления RТ, включенным в одно из плеч измерительного
моста ИМ. При заданном значении температуры ИМ
уравновешен, на вход электронного усилителя ЭУ напряжение не
подается. Предположим, что внешнее возмущающее воздействие
равно нулю, регулируемая величина xвых
в точности
соответствует заданному значению х, вследствие чего xвых – xу =
0 и регулирующий орган (движок АТ) находится в состоянии покоя.
Состояние САР, характеризуемое отсутствием возмущающих
воздействий и постоянством регулируемой величины, называется
установившимся состоянием.
22.
3. Установившееся состояние. Переходной процесс.Допустим, что каким-то образом произошло отклонение
температуры от заданного значения (открыли дверцу шкафа,
изменилось напряжение питающей сети). Соответственно, изменится
сопротивление RТ, и это вызовет разбаланс измерительного моста ИМ.
На электронный усилитель подается напряжение разбаланса, и
электродвигатель начнет вращаться, тем самым перемещая движок
автотрансформатора в сторону ликвидации отклонения температуры в
шкафу от заданного значения. При достижении заданного значения
температуры ИМ балансируется, М останавливается, и система
приходит в равновесное состояние.
Этот процесс восстановления заданного значения параметра
после воздействия внешних возмущений называется переходным
процессом.
В данной САУ заданное значение температуры устанавливается
движком потенциометра RЗ. а потенциометр R служит для коррекции
равновесия ИМ при значениях температуры в СШ, равных заданному.
23.
3. Установившееся состояние. Переходной процесс.вход
Хвх
U
АТ
выход
Объект
Ху
М
ЭУ
ИМ
Хвых
ИП
АР
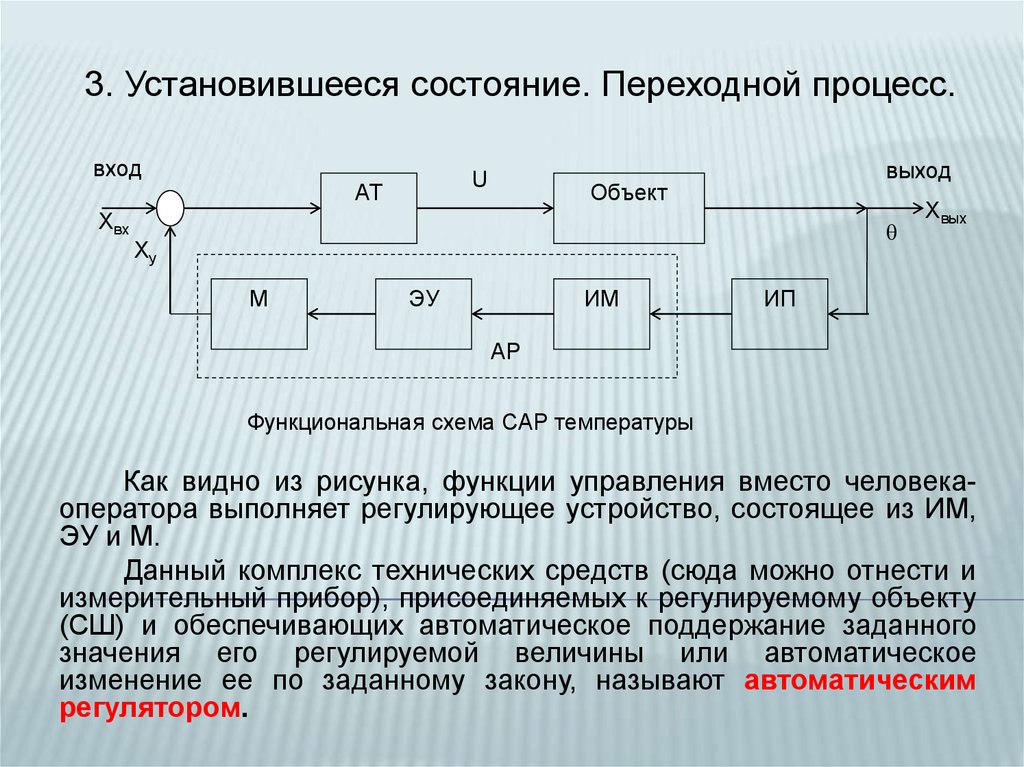
Функциональная схема САР температуры
Как видно из рисунка, функции управления вместо человекаоператора выполняет регулирующее устройство, состоящее из ИМ,
ЭУ и М.
Данный комплекс технических средств (сюда можно отнести и
измерительный прибор), присоединяемых к регулируемому объекту
(СШ) и обеспечивающих автоматическое поддержание заданного
значения его регулируемой величины или автоматическое
изменение ее по заданному закону, называют автоматическим
регулятором.
24.
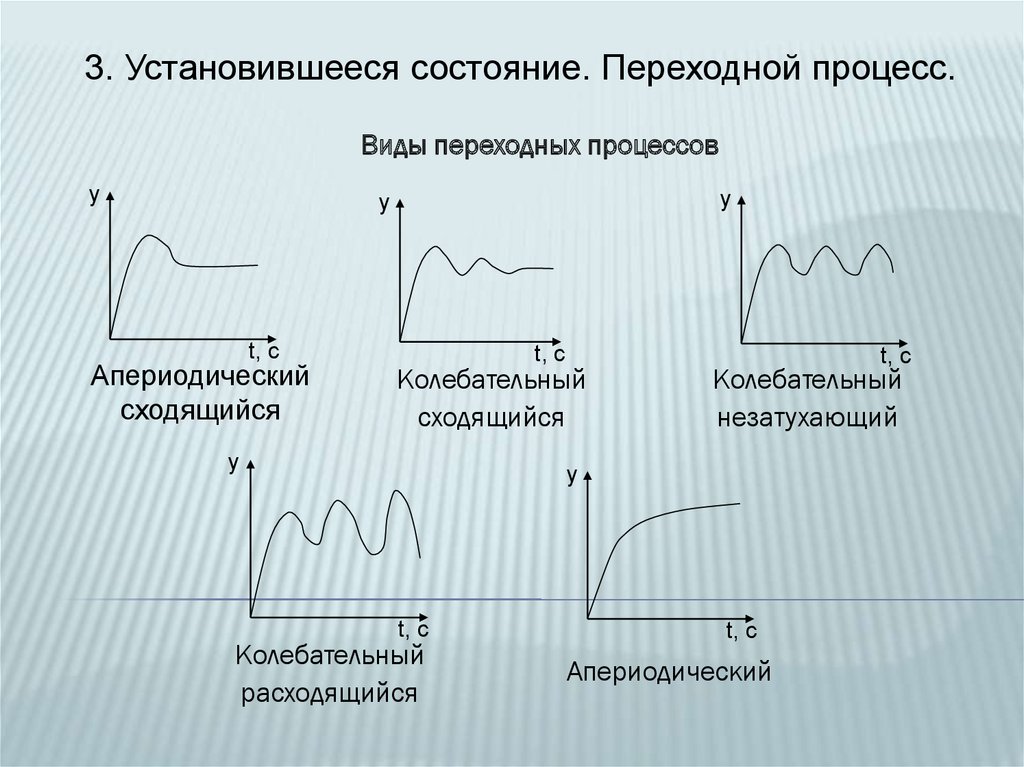
3. Установившееся состояние. Переходной процесс.Виды переходных процессов
y
y
y
t, c
Апериодический
сходящийся
t, c
Колебательный
сходящийся
y
t, c
Колебательный
незатухающий
y
t, c
Колебательный
расходящийся
t, c
Апериодический
25.
Вопросы для самопроверки:1) Дайте определение объекту регулирования, регулируемым
параметрам?
2) Что называется автоматическим управлением и
регулированием?
3) Что такое САУ (дайте определение)?
4) В чем разница между функциональной схемой и структурной
схемой?
5) Перечислите основные составляющие любого процесса
управления?
6) Как называются элементы САУ, выполняющие эти действия?
7) Что называется возмущением и какие виды возмущений Вы
знаете?
26.
Проверим себя ?1.
Система,
которая
осуществляет
поддержание
регулируемых параметров или их изменение по
определенному закону без непосредственного участия
человека, называется …
А) системой автоматического управления;
B) системой автоматического регулирования;
C) системой автоматизированного управления;
D) автоматической системой;
E) технологической системой.
2. Элемент системы, в котором определенным образом
преобразуется входная величина в выходную, называется
…
А) управляющим устройством;
B) сигналом;
C) объектом управления;
D) звеном;
E) регулятором.
27.
Проверим себя ?3. Установите соответствие:
А) x(t) – входная величина; f(t) – управление; z(t) – задание; y(t) –
выходная величина; g(t) – возмущение;
B) x(t) – возмущение; f(t) – задание; z(t) – входная величина; y(t) –
выходная величина; g(t) – управление воздействие;
C) x(t) – входная величина; f(t)- возмущение; z(t)- управление; y(t)выходная величина; g(t)- задание;
D) x(t) – управление; f(t)- возмущение; z(t)- управление; y(t)- выходная
величина; g(t)- задание;
E) x(t) – задание; f(t)-управление; z(t)-входная величина; y(t)- выходная
величина; g(t)- возмущение.
4. Воздействие выхода системы на её вход называется…
А) управляющим воздействием;
B) обратной связью;
C) сигналом;
D) автоматическим управлением;
E) принципом управления;