



 Электроника
ЭлектроникаПохожие презентации:










Устройство управления сканирующим лидаром в системе технического зрения
1.
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА ПОПРОГРАММЕ СПЕЦИАЛИТЕТА
На тему:
Устройство управления сканирующим лидаром в системе технического
зрения
Выполнил: Студент гр. И981 Худенко Р.О.
Руководитель: Лосев С.А.
2.
Система технического (машинного) зрения используется вробототехнических комплексах для формирования трехмерной картины
окружающей среды.
Лидары применяются в системах обеспечения безопасности движения
автономных транспортных средств (планетоходы, беспилотные
автомобили), в системах распознавания образов (сборочные
конвейеры на безлюдных производствах), в геологических,
геодезических, экологических, архиологических исследованиях.
В состав систем технического зрения входит компьютер и лазерный
радар (лида́р). Часто, для быстрого обнаружения подлежащих детальному
исследованию областей, в системах технического зрения применяется
телевизионная камера.
3.
ПРОТОТИПЫпроектируемого устройства
Velodyne HDL-32E Velodyne HD-64E
Hesai
Teledyne Optech LSC
Длина волны, нм.
905
905
903
905
Горизонтальный охват,
град.
360
360
360
360
Вертикальный охват,
град.
40
40
40
40
Скорость вращения,
об./сек.
10
15
12
10
От 1 до 100
От 1 до 120
От 1 до 200
От 5 до 25
Точность
(на расстоянии 25 м.), см.
2
2
2
2,4
Угловое разрешение по
горизонтали, град.
0,8
1,8
Угловое разрешение по
вертикали, град.
1,33
0.9
Поток данных, точек в
секунду
700 000
Дальность, м.
1,3 млн.
850 000
4.
1. Анализ прототипов и уточнениетехнического задания
СКАНИРУЮЩИЕ ЛИДАРЫ ФИРМЫ VELODYNE
Технические характеристики модели Velodyne HDL-32E:
Технические характеристики модели Velodyne HD-64E:
длина волны 905 нм.,
длина волны 905 нм.,
горизонтальный охват 360 град.,
горизонтальный охват 360 град.,
вертикальный охват 40 град.,
вертикальный охват 40 град.,
скорость вращения 10 оборотов в секунду.,
скорость вращения 15 оборотов в секунду
дальность от 1 до 100 метров.,
дальность от 1 до 120 метров,
точность 2 см. (на расстоянии 25 м.).,
точность 2 см. (на расстоянии 25 м.),
угловое разрешение по горизонтали 0,8 град.,
поток данных 1,3 млн. точек в секунду.
угловое разрешение по вертикали 1,33 град.,
поток данных 700 000 точек в секунду.
4
5.
1. Анализ прототипов и уточнениетехнического задания
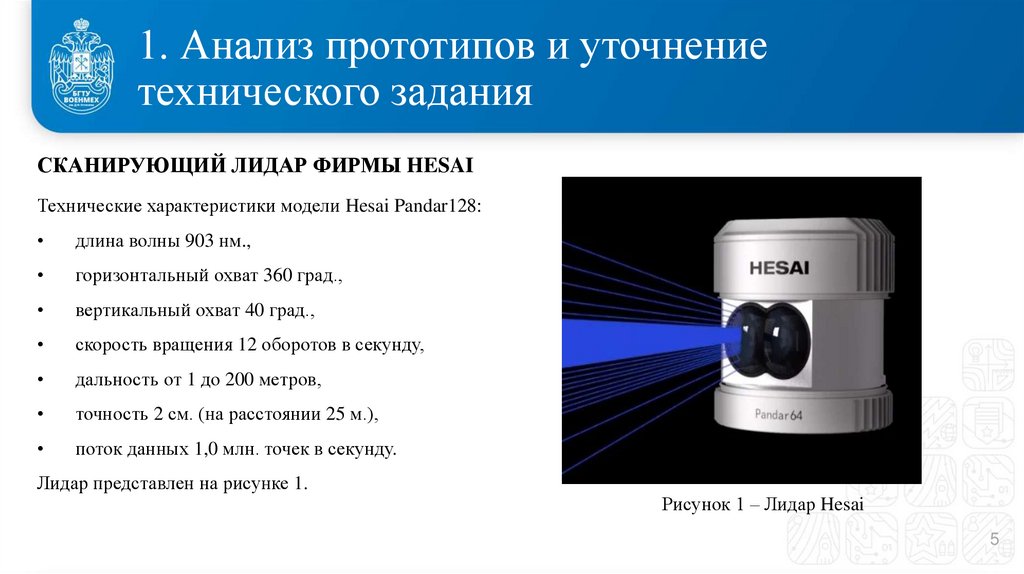
СКАНИРУЮЩИЙ ЛИДАР ФИРМЫ HESAI
Технические характеристики модели Hesai Pandar128:
длина волны 903 нм.,
горизонтальный охват 360 град.,
вертикальный охват 40 град.,
скорость вращения 12 оборотов в секунду,
дальность от 1 до 200 метров,
точность 2 см. (на расстоянии 25 м.),
поток данных 1,0 млн. точек в секунду.
Лидар представлен на рисунке 1.
Рисунок 1 – Лидар Hesai
5
6.
2. Построение функциональнойспецификации
Рисунок 2 – Логика работы системы технического зрения
6
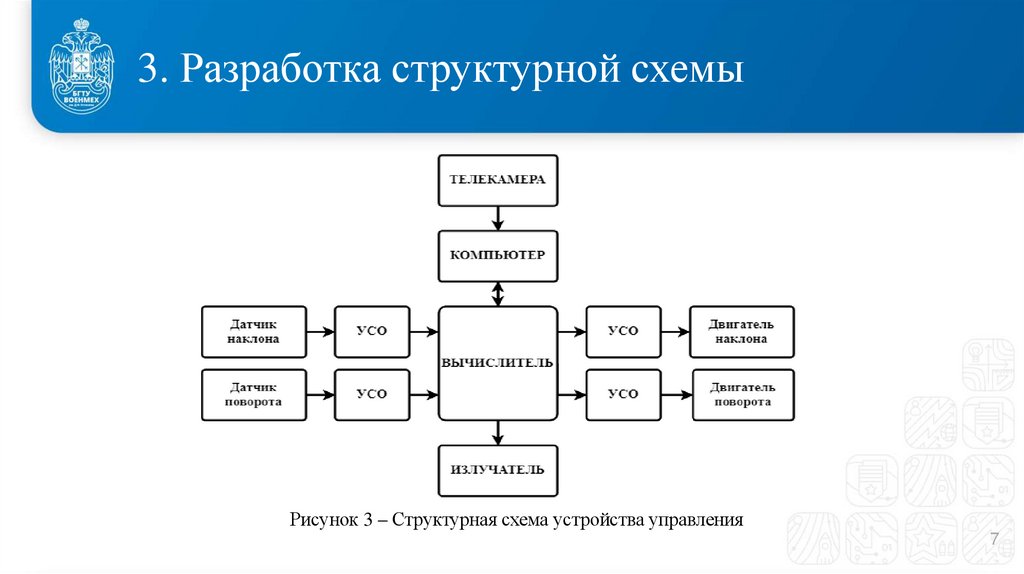
7.
3. Разработка структурной схемыРисунок 3 – Структурная схема устройства управления
7
8.
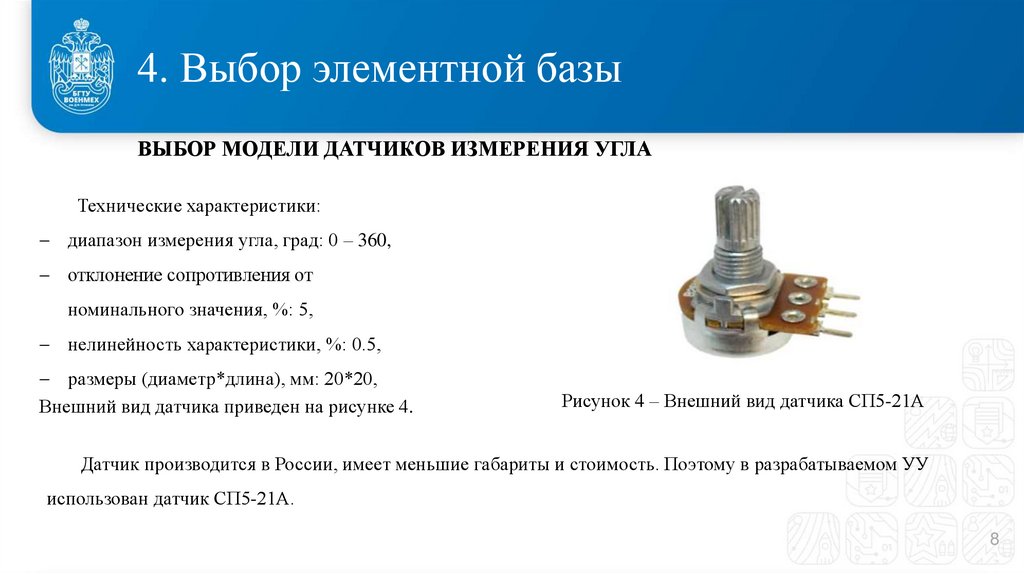
4. Выбор элементной базыВЫБОР МОДЕЛИ ДАТЧИКОВ ИЗМЕРЕНИЯ УГЛА
Технические характеристики:
диапазон измерения угла, град: 0 – 360,
отклонение сопротивления от
номинального значения, %: 5,
нелинейность характеристики, %: 0.5,
размеры (диаметр*длина), мм: 20*20,
Внешний вид датчика приведен на рисунке 4.
Рисунок 4 – Внешний вид датчика СП5-21А
Датчик производится в России, имеет меньшие габариты и стоимость. Поэтому в разрабатываемом УУ
использован датчик СП5-21А.
8
9.
4. Выбор элементной базыВЫБОР МОДЕЛИ УСО ДВИГАТЕЛЕЙ
В качестве УСО (драйвера) для двигателей микроэлектромеханической развертки лидара рассматривались три
микросхемы одной ценовой группы от компании STMicroelectronics: L298N, L6203 и L293D.
Назначение выводов драйвера L298N:
Vss, GND - питание драйвера (4,5-7 В),
Vs и GND - питание двигателей (5-46 В),
OUTPUT1-OUTPUT2 и OUTPUT3-OUTPUT4 – выводы драйвера
для подключения первого и второго двигателя,
ENABLE1 и ENAPLE2 – разрешение включения питания первого и
второго двигателя,
INPUT1-INPUT2 и INPUT3-INPUT4 – входы драйвера, на которые
подаются сигналы управления первым и вторым двигателем.
Рисунок 5 – Расположение выводов L298N
9
10.
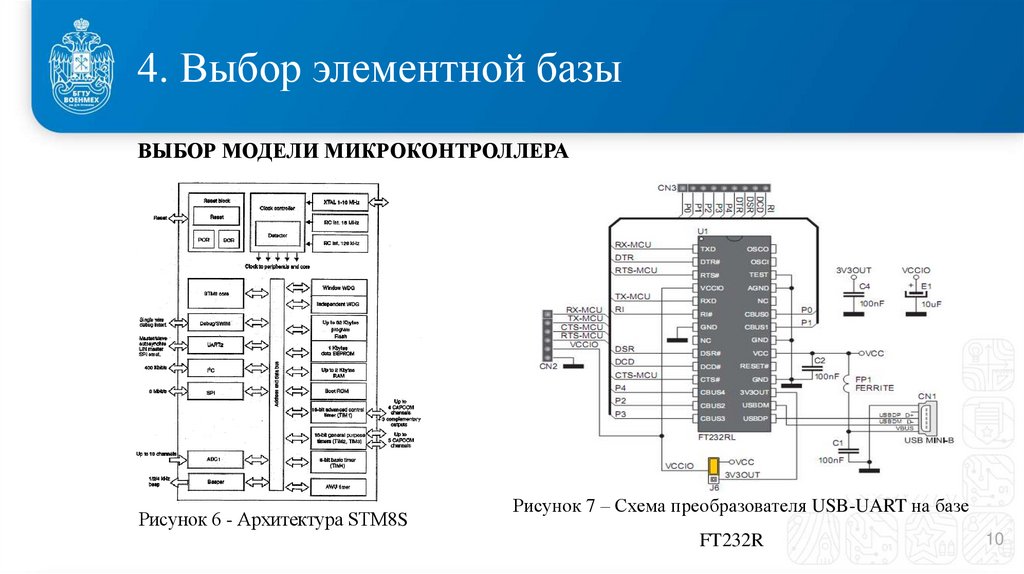
4. Выбор элементной базыВЫБОР МОДЕЛИ МИКРОКОНТРОЛЛЕРА
Рисунок 6 - Архитектура STM8S
Рисунок 7 – Схема преобразователя USB-UART на базе
FT232R
10
11.
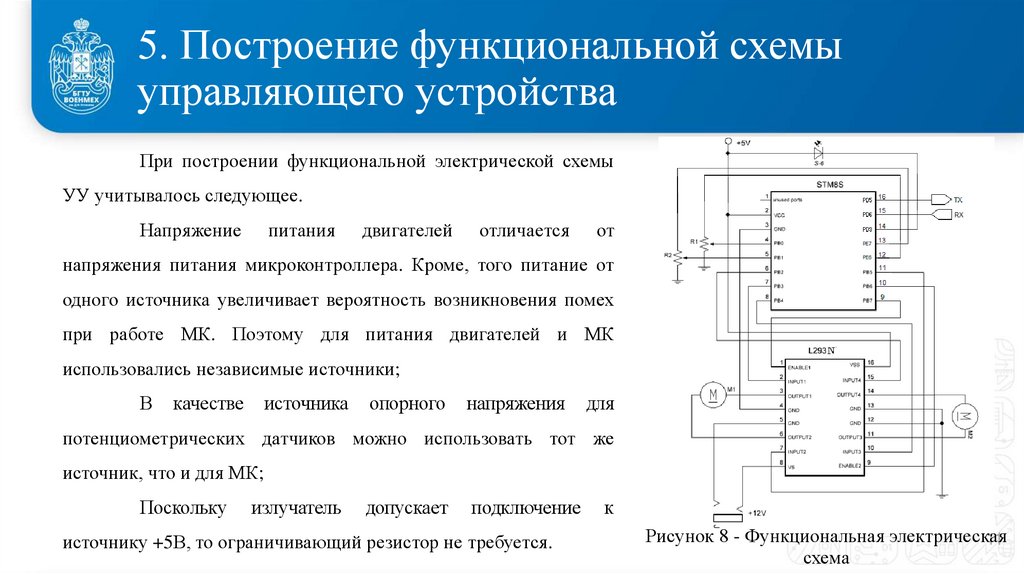
5. Построение функциональной схемыуправляющего устройства
При построении функциональной электрической схемы
УУ учитывалось следующее.
Напряжение
питания
двигателей
отличается
от
напряжения питания микроконтроллера. Кроме, того питание от
одного источника увеличивает вероятность возникновения помех
при работе МК. Поэтому для питания двигателей и МК
использовались независимые источники;
В
качестве
источника
опорного
напряжения
для
потенциометрических датчиков можно использовать тот же
источник, что и для МК;
Поскольку
излучатель
допускает
подключение
источнику +5В, то ограничивающий резистор не требуется.
к
Рисунок 8 - Функциональная электрическая
11
схема
12.
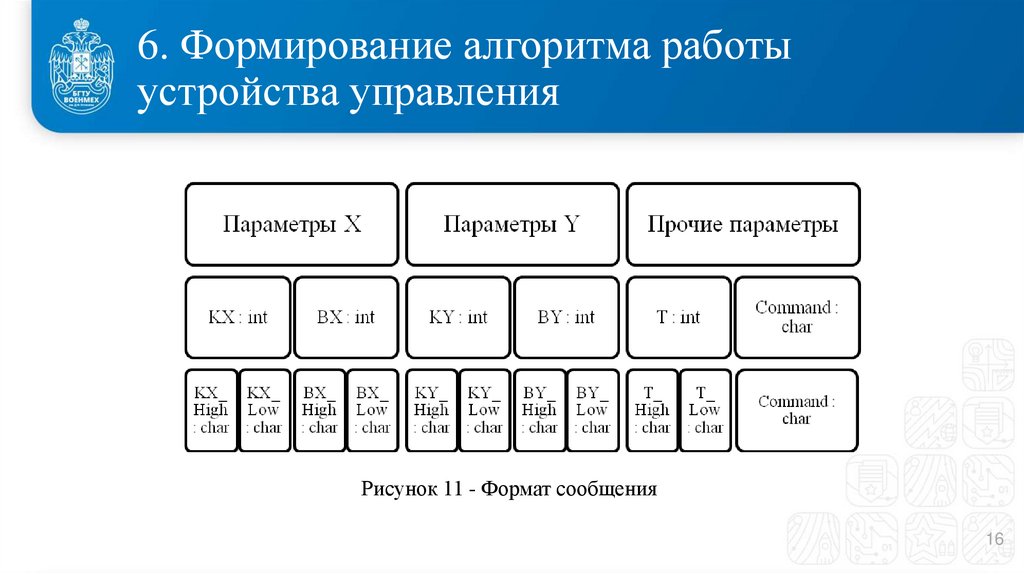
6. Формирование алгоритма работыустройства управления
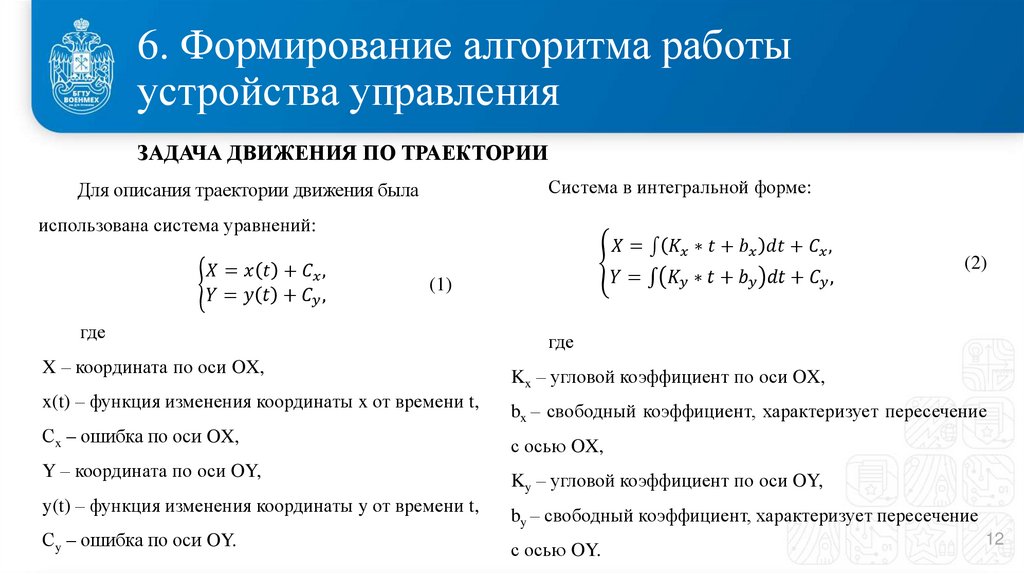
ЗАДАЧА ДВИЖЕНИЯ ПО ТРАЕКТОРИИ
Система в интегральной форме:
Для описания траектории движения была
использована система уравнений: