 Физика
ФизикаПохожие презентации:










Обработка результатов численного эксперимента
1.
ОБРАБОТКА РЕЗУЛЬТАТОВ ЧИСЛЕННОГО ЭКСПЕРИМЕНТАРезультаты расчета распечатываются в виде таблиц:
a) исходных данных (их необходимо включить в пояснительную
записку);
b) расчета линейных и угловых перемещений, поворотов;
c) расчета трех внутренних усилий – нормальной силы, поперечной
силы и изгибающего момента. В этой таблице даются три значения
усилий: в начале, середине и конце каждого звена.
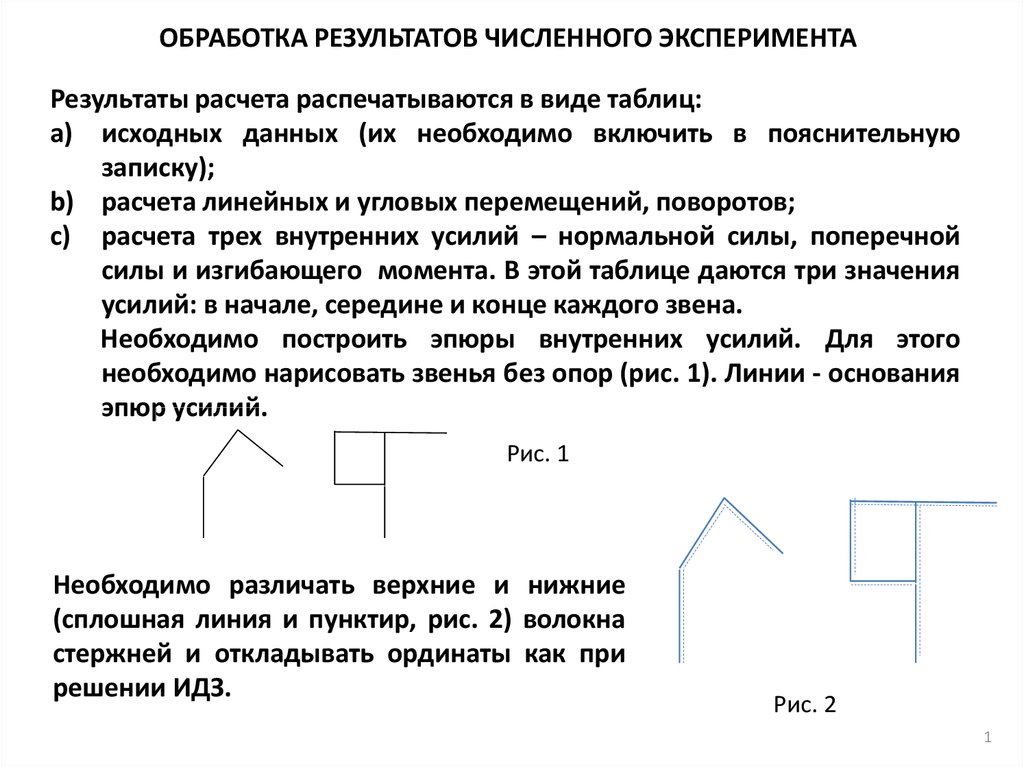
Необходимо построить эпюры внутренних усилий. Для этого
необходимо нарисовать звенья без опор (рис. 1). Линии - основания
эпюр усилий.
Рис. 1
Необходимо различать верхние и нижние
(сплошная линия и пунктир, рис. 2) волокна
стержней и откладывать ординаты как при
решении ИДЗ.
Рис. 2
1
2.
В начале, в середине и в конце перпендикулярно каждому основаниюэпюры отложить в масштабе рассчитанные ординаты усилий и соединить
их прямыми линиями. Штриховка выполняется
перпендикулярно
основанию каждой эпюры на каждом стержне (может быть наложение
штрихов). Указать значения ординат и знаки усилий (на поле эпюр).
Обозначить эпюры (название, единицы измерения).
2
3.
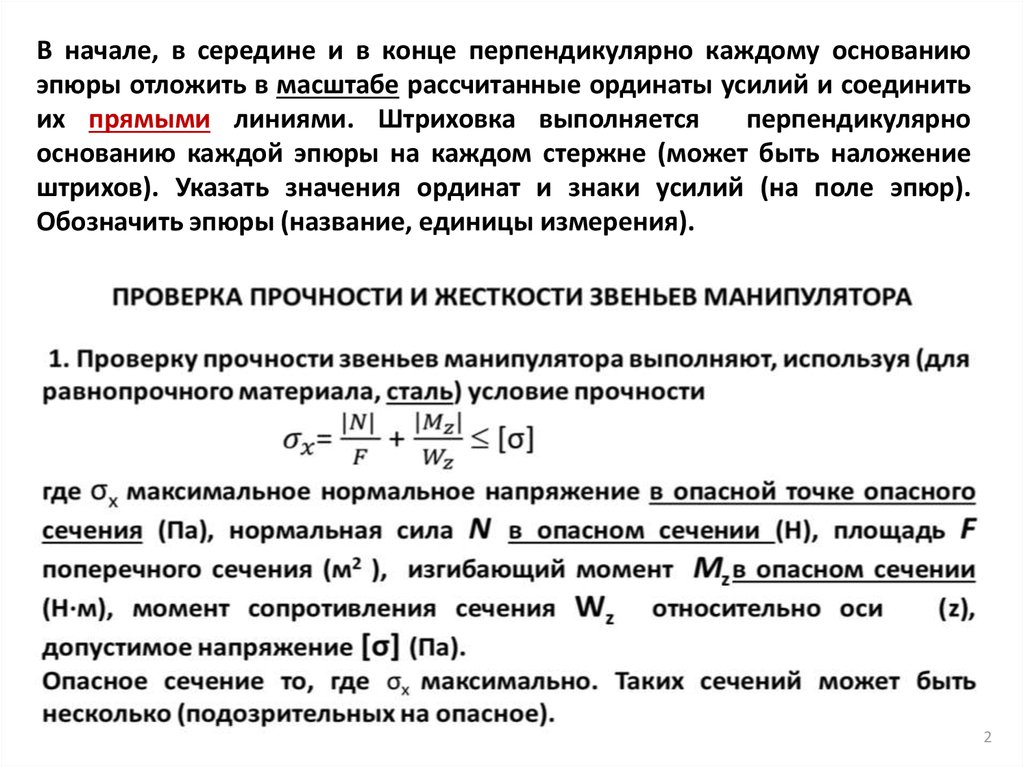
Оценив прочность, следует сделать вывод, выполняется или не выполняется условиепрочности. Если условие прочности выполняется, то необходимо подсчитать запас
прочности по формуле:
. Здесь
предел текучести материала
звена.
2. Проверку жесткости манипулятора следует выполнить, сравнив
рассчитанный прогиб руки манипулятора с допустимым значением, известным из
исходных данных. Прогибы должны иметь одинаковые единицы измерения.
wр w .
Если условие жесткости не выполняется, то необходимо предложить возможные
варианты изменения параметров манипулятора, которые приведут к уменьшению
расчетного прогиба.
l
y
P
w
x
z
3
4.
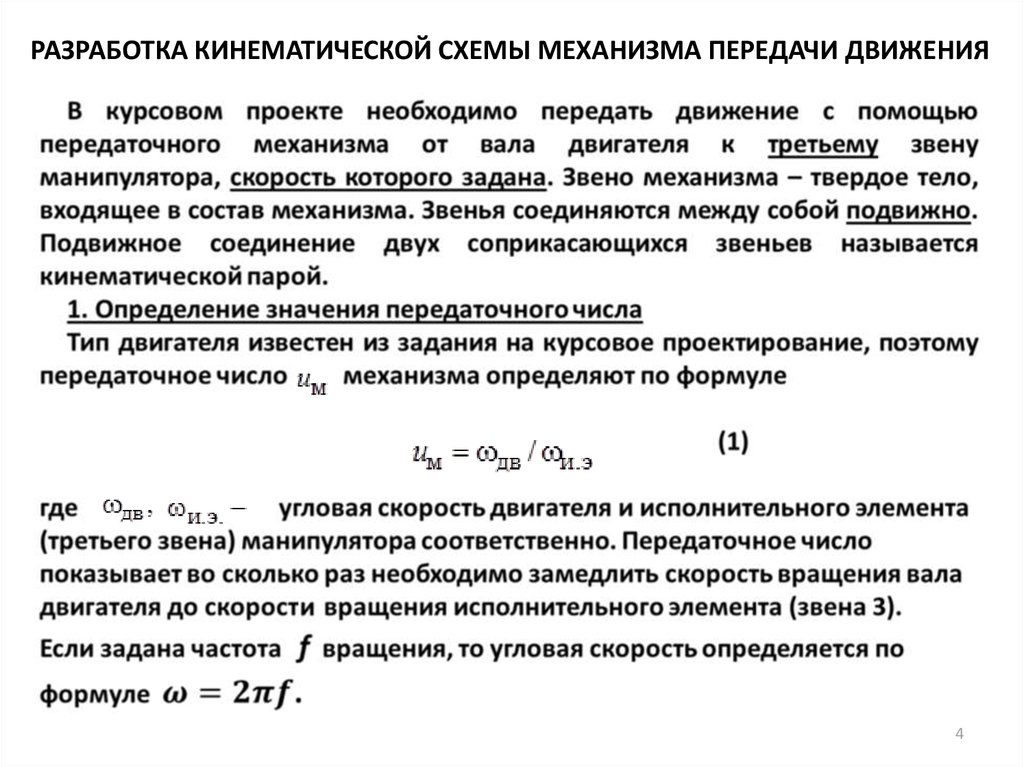
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА ПЕРЕДАЧИ ДВИЖЕНИЯ4
5.
В манипуляторах ПР используются высокоскоростные двигатели, поэтомупередаточное число принимает большое значение. Передать движение с
помощью одной передачи не удается (в метод. указаниях табл. 3.1), и
движение замедляют с помощью последовательно соединенных
передач.
Передаточное число последовательно соединенных передач механизма
определяют по формуле:
(2)
Передаточное число отдельной
определяется зависимостью:
передачи
круглыми
колесами
где
угол поворота,
число оборотов (частота вращения), d –
диаметр, z – число зубьев колеса. Рекомендации по выбору значений
передаточных чисел отдельных передач даются в четвертом столбце
табл. 3.1 метод. указаний.
5
6.
ВАЖНОЗначения передаточных чисел отдельных передач должны
быть рационально распределены по ступеням многозвенного
механизма.
Целесообразно
увеличивать
значения
передаточных чисел начиная со второй ступени:
<
<
(3)
Это уменьшает ошибку мертвого хода механизма, улучшает
его динамические характеристики и уменьшает габариты.
Мертвый ход механизма – свободное перемещение ведущего
звена при неподвижном ведомом звене (проявляется при
реверсе – изменении направления вращения).
6
7.
В курсовом проекте предполагается, что передачу движения от двигателя круке необходимо осуществить с помощью передаточного механизма,
установленного на предыдущем звене.
Вычислить передаточное число механизма по формуле (1). По формуле (2)
с учетом (3) и данных о диапазонах изменения передаточного числа и КПД
(из метод. указаний табл. 3.1) назначить необходимое число
последовательно соединенных передач и определить их передаточные
числа. В расчетах не рекомендуется брать предельные значения
передаточных чисел из диапазона их изменения.
Далее нарисовать одну кинематическую схему механизмов в соответствии
со стандартами (ГОСТ 2.701-76 «Схемы. Виды и типы. Общие требования к
выполнению», ГОСТ 2.703-68 «Правила выполнения кинематических схем»,
ГОСТ 2.721-74 «Обозначения графические условные в схемах»).
Примеры см. в методических указаниях на стр. 19.
7
8.
ПОДБОР ДВИГАТЕЛЯ ПРИВОДА ТРЕТЬЕГО ЗВЕНА8
9.
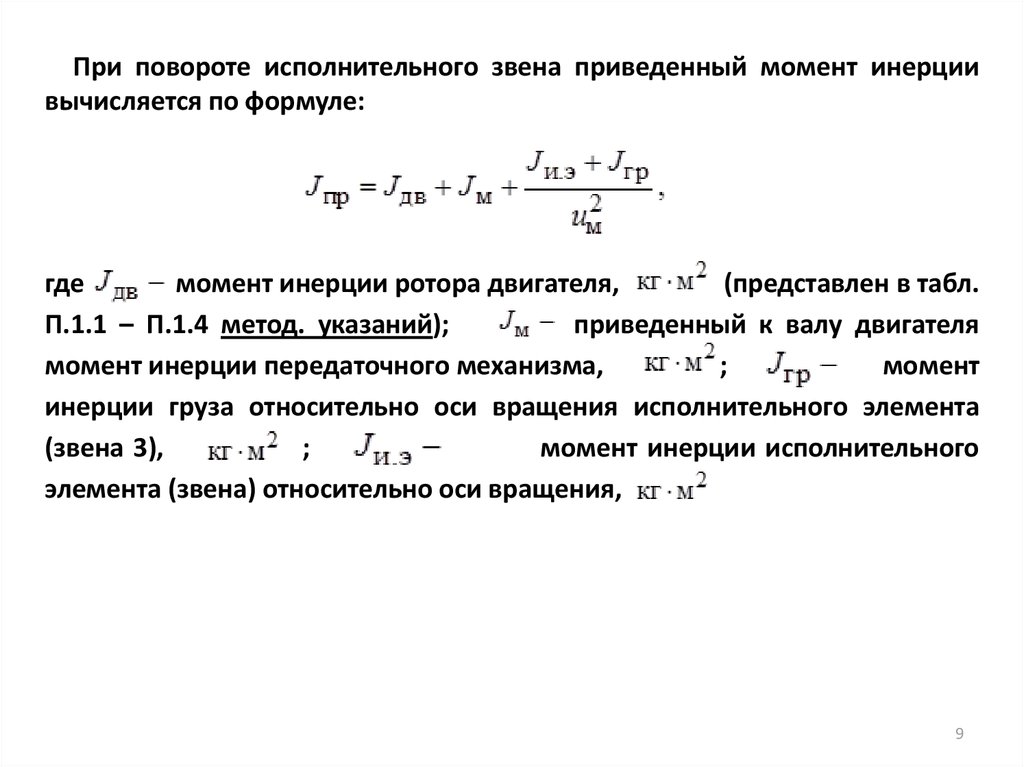
При повороте исполнительного звена приведенный момент инерциивычисляется по формуле:
где
момент инерции ротора двигателя,
(представлен в табл.
П.1.1 – П.1.4 метод. указаний);
приведенный к валу двигателя
момент инерции передаточного механизма,
;
момент
инерции груза относительно оси вращения исполнительного элемента
(звена 3),
;
момент инерции исполнительного
элемента (звена) относительно оси вращения,
9
10.
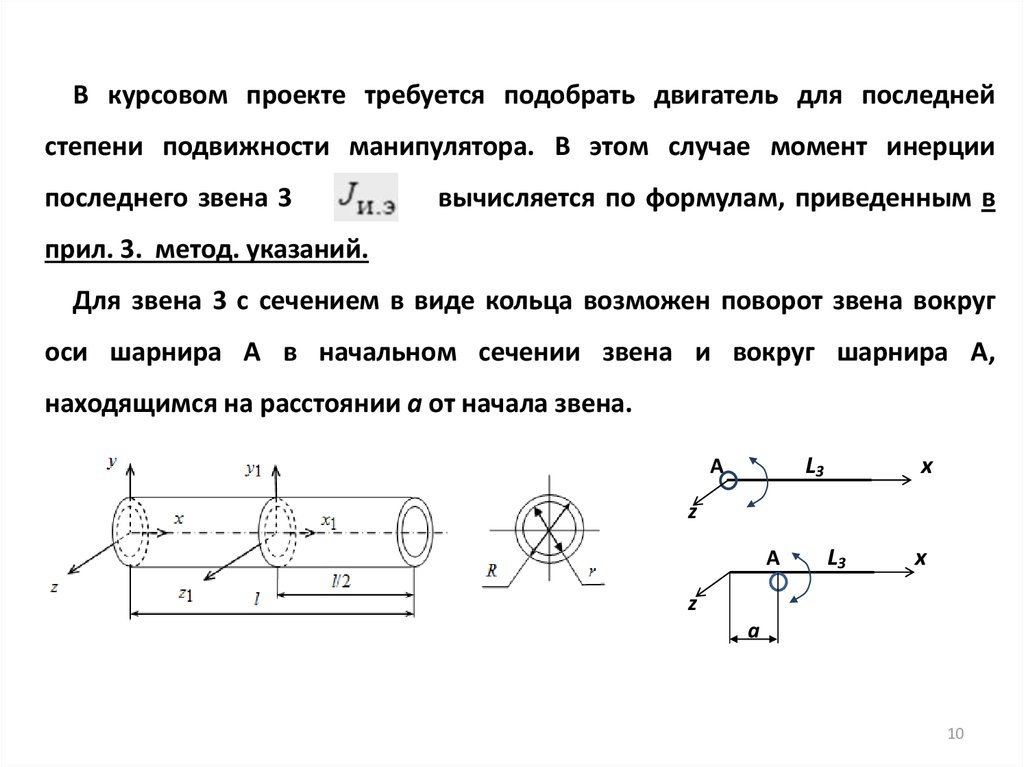
В курсовом проекте требуется подобрать двигатель для последнейстепени подвижности манипулятора. В этом случае момент инерции
последнего звена 3
вычисляется по формулам, приведенным в
прил. 3. метод. указаний.
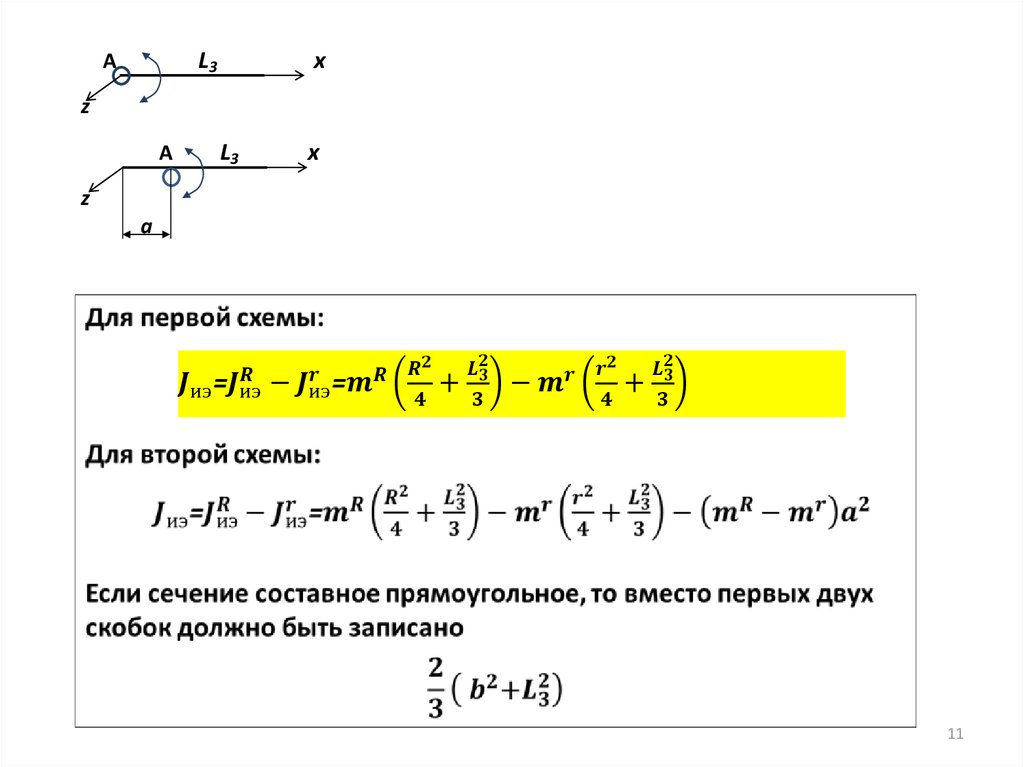
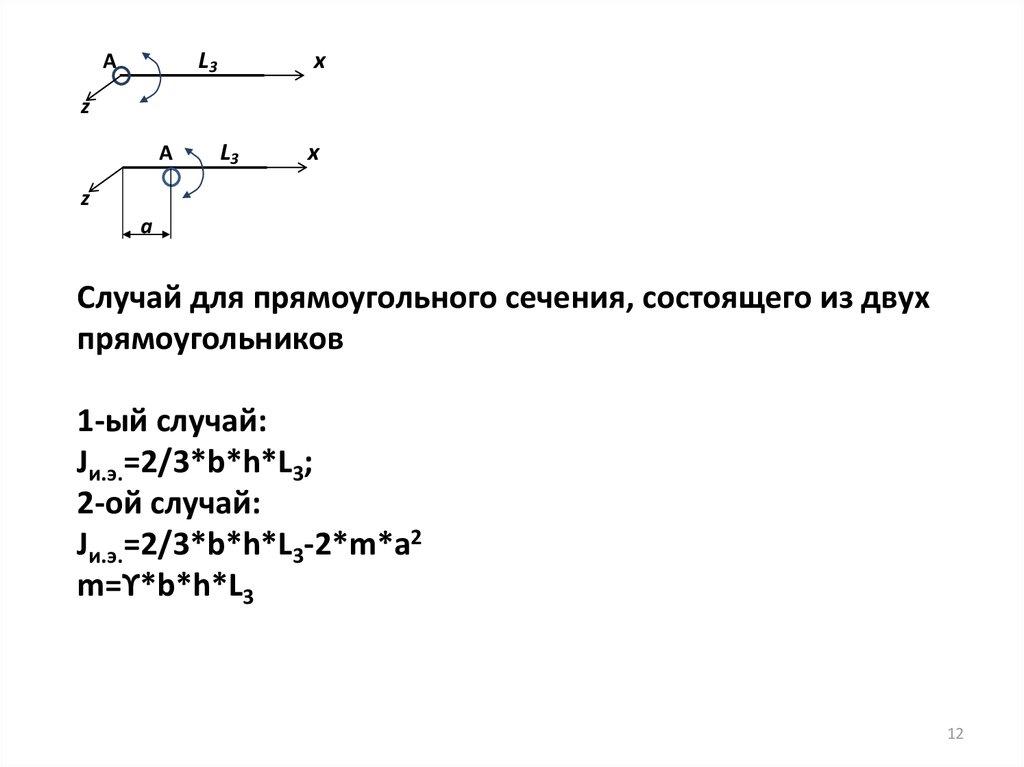
Для звена 3 с сечением в виде кольца возможен поворот звена вокруг
оси шарнира А в начальном сечении звена и вокруг шарнира А,
находящимся на расстоянии a от начала звена.
L3
А
x
z
А
L3
x
z
a
10
11.
L3А
x
z
А
L3
x
z
a