









 Электроника
ЭлектроникаПохожие презентации:






")



Обмен данными в комплексе УРТК и представление соответствующих команд
1.
Обмен данными в комплексеУРТК и представление
соответствующих команд
29.12.2016
2.
ПЭВМ и модуль процессора блока управления УРТКсопряжены по параллельному интерфейсу
Клавиатура
ПЭВМ
Модуль управления
Centronics
Пульт
управления
Модуль процессора
Модуль(блок)
питания
Модуль индикации
БОД
БУИУ
Блок
управления
Функциональная схема системы управления УРТК
приняты следующие сокращения: БОД – блок обработки датчиков;
БУИУ – блок управления исполнительными устройствами
29.12.2016
2
3.
Группа АУправление
8
Буфер
шины
данных
Группа А
Порт А
8
Группа А
Порт С
4
Управление
записью и
чтением
Группа В
Порт С
5
4
cs
Группа В
управление
Группа В
Порт В
8
Это микросхема I 8255
являлась устройством
сопряжения интерфейсной
платы Centronics с микропроцессорным модулем
блока управления УРТК.
В используемой версии блока
УРТК ее функции в режиме “0”
эмулирует микропроцессор,
что вполне достаточно для
решения задач обмена
данными между блоком управления и ПЭВМ. Для обмена
используются два регистра
платы Centronics:
Регистр
данных
управления
Порт LPT0
378h
37Ah
Порт LPT1
278h
27Ah
Обмен осуществляется
байтами данных.
29.12.2016
4.
Что нужно знать при программировании функций управленияисполнительными элементами УРТК и функций опроса датчиков
Схему обмена данными между блоком управления
УРТК и портом Centronics ПК (слайд 3),
Алгоритмы обмена данными (слайд 4),
Назначение регистров блока управления и порядок
формирования в них байтов данных (слайд 5) для
включения исполнительных элементов, с примерами
(слайд 6),
Назначение регистров блока управления для опроса
датчиков и порядок формирования в регистрах байтов
данных (слайд 7), с примером (слайд 8),
Соответствие между числами в разных системах
счисления (слайд 9),
Общий алгоритм программы.
29.12.2016
4
5.
Схема обмена данными между Centronics имикропроцессорным модулем блока управления
SNS2
0x037A
SNS1
RC
SNS0
DRV0
0x0378
RD
DRV1
8
LEDO
8
Микропроцессорный модуль блока управления
Centronics
Регистр
Порт LPT0
Порт LPT1
данных
378h
278h
управления
37Ah
27Ah
29.12.2016
Сопряжение БУ (со стороны блока
управления) с ЭВМ для обмена данными
осуществляет эмулятор, реализованный в
микропроцессорном модуле БУ. Здесь RC –
регистр управления, RD – регистр данных.
5
6.
Алгоритмы обмена даннымиКод команд
29.12.2016
Описание действия
11h
Установка состояния
двигателей
12h
Установка состояния
светодиодных
индикаторов
13h
Получение текущего
состояния датчиков
14h
Получение текущего
состояния
клавиатуры
Алгоритм действия
1.
2.
В регистр RC отправить константу 11h;
Через регистр RD последовательно
передать два байта состояния двигателей:
DRV1, DRV0.
1.
2.
В регистр RC отправить константу 12h;
Через регистр RD передать байт состояния
светодиодных индикаторов LED0.
1.
2.
В регистр RC отправить константу 13h;
Через регистр RD последовательно
принять три байта состояния датчиков:
SNS0, SNS1 и SNS2.
1.
2.
В регистр RC отправить константу 14h;
Через регистр RD последовательно
принять три байта состояния клавиатуры:
KBD0 и KBD1.
6
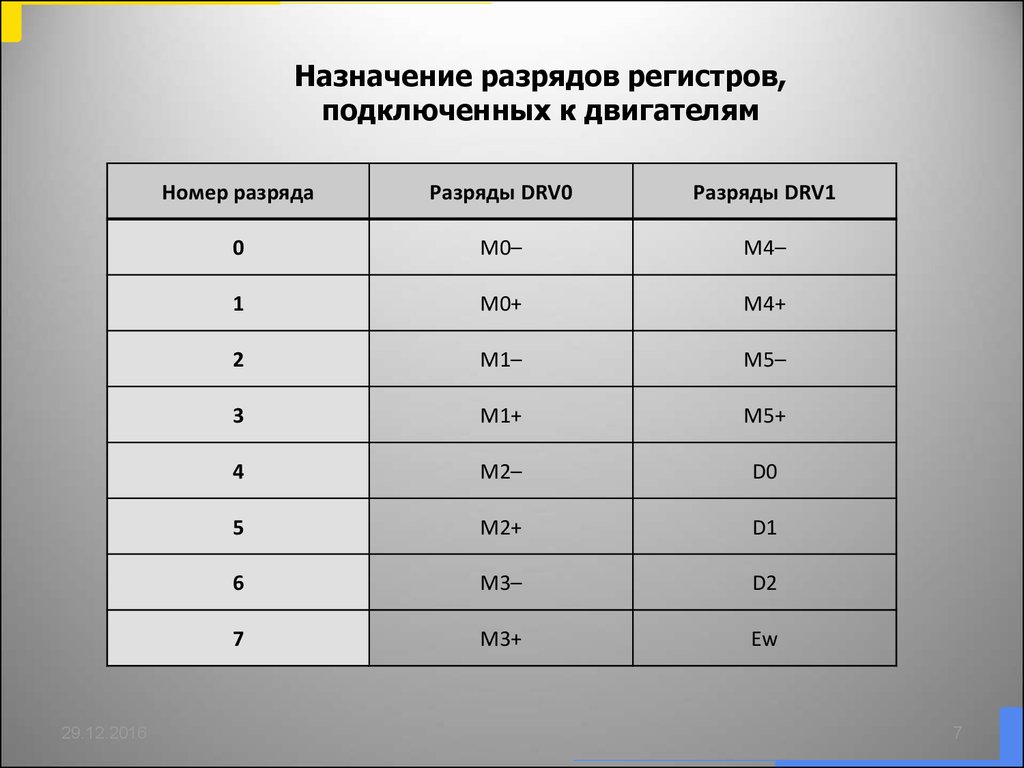
7.
Назначение разрядов регистров,подключенных к двигателям
29.12.2016
Номер разряда
Разряды DRV0
Разряды DRV1
0
M0–
M4–
1
M0+
M4+
2
M1–
M5–
3
M1+
M5+
4
M2–
D0
5
M2+
D1
6
M3–
D2
7
M3+
Ew
7
8.
Пример команд на включение двигателейа) М0+
0
0
0
0
1
0
1
1
11h
1
0
0
0
0
0
0
0
DRV1
0
0
0
0
0
0
1
0
DRV0
б) М0+ и М20
0
0
1
1
0
0
0
0
0
0
0
DRV1
0
0
0
1
0
0
1
0
DRV0
29.12.2016
0
1
1
11h
0
8
9.
Назначение разрядов регистров,подключенных к датчикам
Номер разряда
Разряды SNS0
Разряды SNS1
Разряды SNS2
0
M0 нач
M2 нач
M4 нач
1
M0 кон
M2 кон
M4 кон
2
M0 имп
M2 имп
M4 имп
3
M1 нач
M3 нач
M5 нач
4
M1 кон
M3 кон
M5 кон
5
M1 имп
M3 имп
M5 имп
6
Резерв0
Резерв2
Резерв4
7
Резерв1
Резерв3
Резерв5
29.12.2016
9
10.
Пример реализации команды на чтение данных:(опрос инкрементных датчиков мехатронных модулей со
следующими двигателями М1, М2, М5; концевых датчиков М0,
М3, М4
0
0
0
0
1
1
0
1
13h
0
0
1
0
0
0
1
0
SNS0
0
0
0
1
0
1
0
0
SNS1
0
29.12.2016
0
1
0
0
0
0
1
SNS2
10
11.
Таблица соответствиямежду
числами в разных
системах счисления
29.12.2016
ð = 10
ð=8
ð = 16
ð=2
0
0
0
0000
1
1
1
0001
2
2
2
0010
3
3
3
0011
4
4
4
0100
5
5
5
0101
6
6
6
0110
7
7
7
0111
8
10
8
1000
9
11
9
1001
10
12
A
1010
11
13
B
1011
12
14
C
1100
13
15
D
1101
14
16
E
1110
15
17
F
1111
11
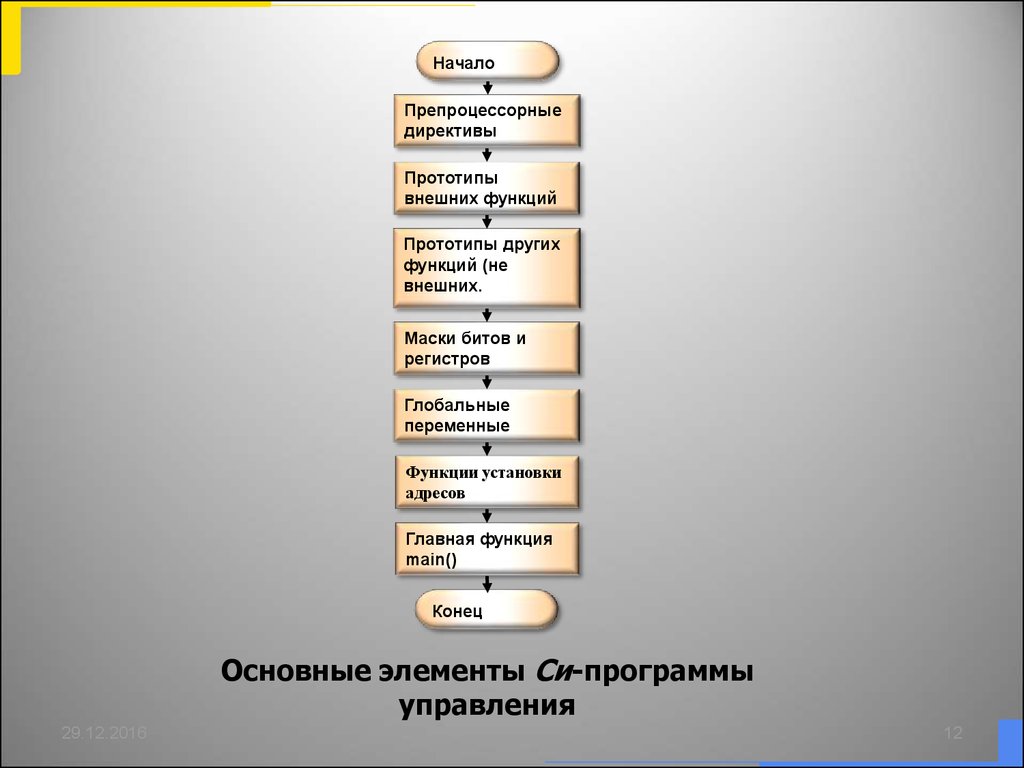
12.
НачалоПрепроцессорные
директивы
Прототипы
внешних функций
Прототипы других
функций (не
внешних.
Маски битов и
регистров
Глобальные
переменные
Функции установки
адресов
Главная функция
main()
Конец
Основные элементы Си-программы
управления
29.12.2016
12