
 Информатика
ИнформатикаПохожие презентации:










Искусственный интеллект в системе управления электроприводом
1. Белорусский Национальный технический университет
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Проект:
Искусственный
интеллект в системе
управления
электроприводом
Студенты гр. 107 05 120:
Савко Никита Буксов Тимофей
Руководитель работы:
Павлюковец Сергей Анатольевич
19 April 2022
1
2.
Актуальность:• Повышение эффективности
устройства при изменении условий
работы
• Увеличение срока службы
устройства
• Автономность в эксплуатации
• Обслуживание устройства
19 April 2022
2
3.
Цель проекта:Развитие методики
проектирования искусственного
интеллекта в части рационального
расчета и анализа данных на
примере создания асистента для
электропривода
19 April 2022
3
4.
Задачи проекта:- В работе рассмотрены вопросы построения адаптивной
системы с переменной структурой и ограничениями
управляющего сигнала, работающей в скользящем
режиме, для решения задачи управления
робототехническими объектами.
- Проанализированы особенности поведения
системы при различных значениях
коэффициентов закона управления и
сформулированы новые условия
существования скользящего режима.
- Определены параметры системы управления и метод адаптивной настройки
коэффициентов регулятора, обеспечивающие ее максимально возможное
быстродействие и высокую динамическую точность.
19 April 2022
4
5.
Сведения об ИИ:Искусственный интеллект (ИИ) – это технология,
а точнее направление современной науки, которое
изучает способы обучить компьютер, роботизированную технику, аналитическую систему разумно
мыслить также как человек.
Главные цели ИИ:
Создание аналитических систем, которые обладают разумным поведением, могут самостоятельно или под надзором
человека обучаться, делать прогнозы и строить гипотезы
на основе массива данных.Реализация интеллекта человека
в машине – создание роботов-помощников, которые могут
вести себя как люди: думать, учиться, понимать и выполнять
поставленные задачи.
19 April 2022
5
6.
Общие сведения:Описание проекта:
Решение задачи создания систем управления
(СУ) роботами предлагается осуществлять с
использованием подходов теории робастных
и адаптивных систем управления, в
частности, систем с переменной структурой
(СПС).
Определены параметры СУ и предложен
метод адаптивной настройки коэффициентов
СПС-регулятора, обеспечивающие
максимально возможное быстродействие
системы и высокую динамическую точность
при любых изменениях параметров ОУ без их
идентификации.
19 April 2022
6
7.
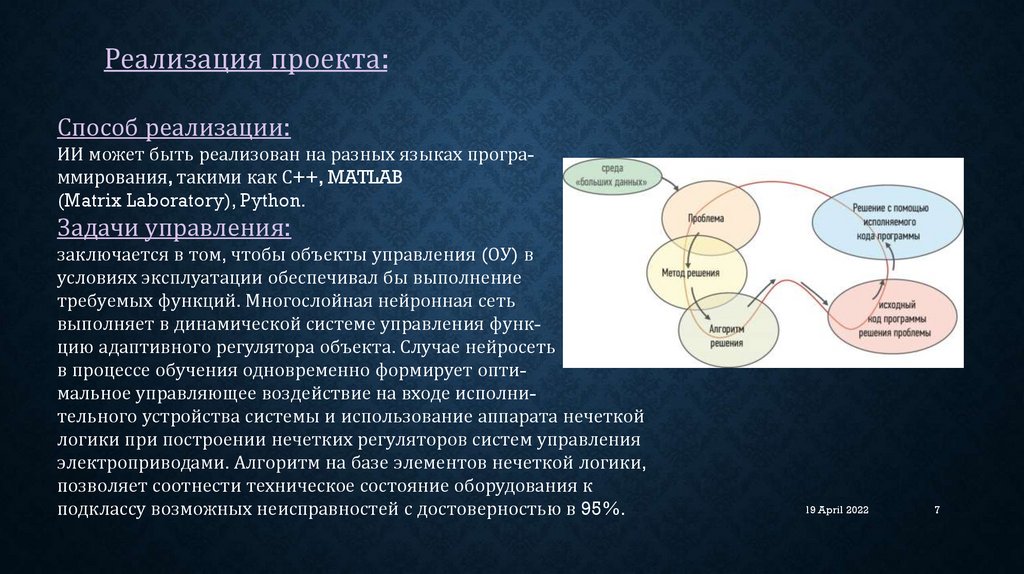
Реализация проекта:Способ реализации:
ИИ может быть реализован на разных языках программирования, такими как С++, MATLAB
(Matrix Laboratory), Python.
Задачи управления:
заключается в том, чтобы объекты управления (ОУ) в
условиях эксплуатации обеспечивал бы выполнение
требуемых функций. Многослойная нейронная сеть
выполняет в динамической системе управления функцию адаптивного регулятора объекта. Случае нейросеть
в процессе обучения одновременно формирует оптимальное управляющее воздействие на входе исполнительного устройства системы и использование аппарата нечеткой
логики при построении нечетких регуляторов систем управления
электроприводами. Алгоритм на базе элементов нечеткой логики,
позволяет соотнести техническое состояние оборудования к
подклассу возможных неисправностей с достоверностью в 95%.
19 April 2022
7
8.
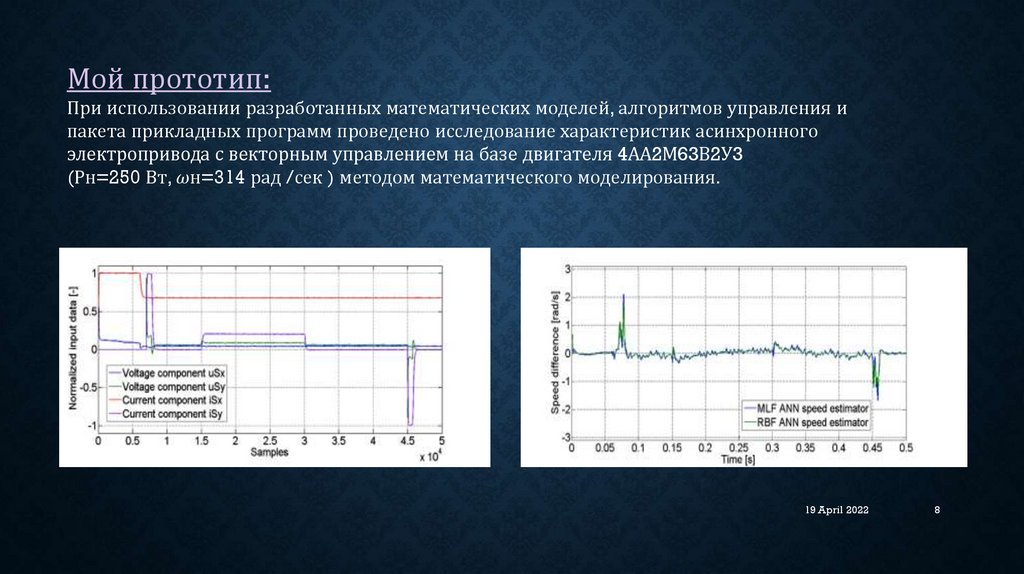
Мой прототип:При использовании разработанных математических моделей, алгоритмов управления и
пакета прикладных программ проведено исследование характеристик асинхронного
электропривода с векторным управлением на базе двигателя 4АА2М63В2У3
(Рн=250 Вт,