






 Механика
МеханикаПохожие презентации:






")



Кинематические пары. Кинематические цепи. Избыточные связи
1. ЛЕКЦИЯ 2
Кинематические пары.Кинематические цепи.
Избыточные связи.
2.
1. Кинематические пары и ихклассификация
Кинематическая пара (КП) –
подвижное соединение двух
соприкасающихся звеньев.
лекция №2.
2
3.
КП классифицируются по следующимпризнакам:
1. По виду места связи (места контакта)
поверхностей звеньев:
- низшие КП, в которых контакт звеньев
осуществляется по плоскости или поверхности
(пары скольжения);
- высшие КП, в которых контакт звеньев
осуществляется по линиям или точкам (пары,
допускающие скольжение с перекатыванием).
лекция №2
3
4.
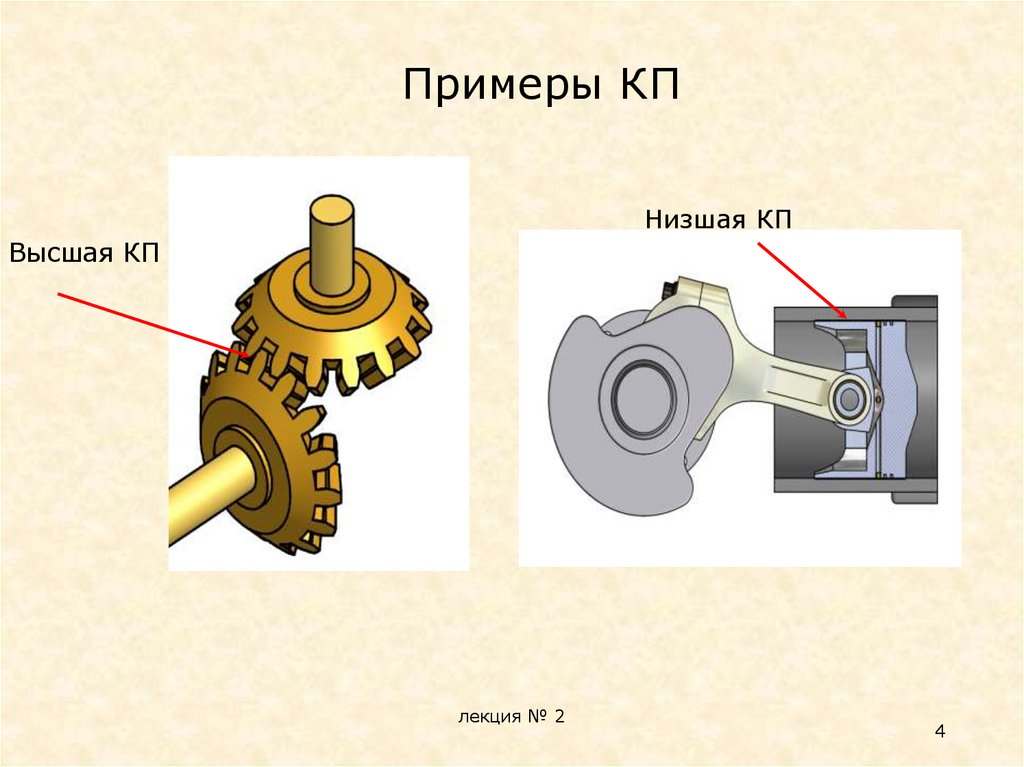
Примеры КПНизшая КП
Высшая КП
лекция № 2
4
5.
2.По относительному движениюзвеньев, образующих пару:
- вращательные;
- поступательные;
лекция № 2
5
6.
- винтовые;- плоскостные;
- сферические.
лекция № 2
6
7.
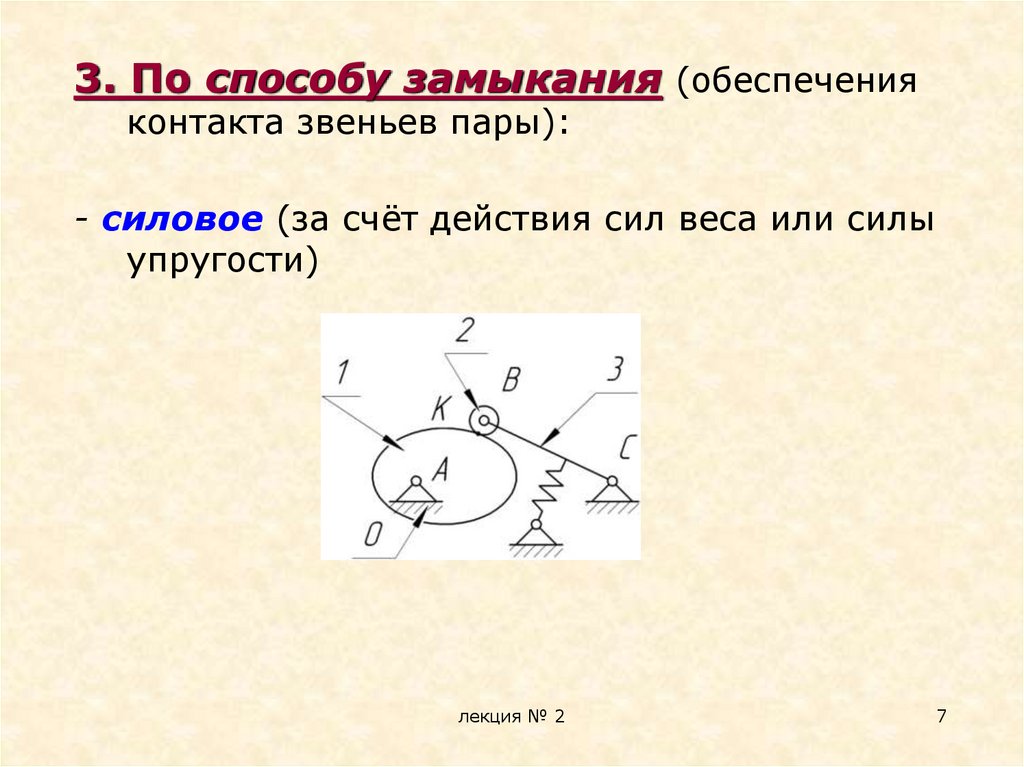
3. По способу замыкания (обеспеченияконтакта звеньев пары):
- силовое (за счёт действия сил веса или силы
упругости)
лекция № 2
7
8.
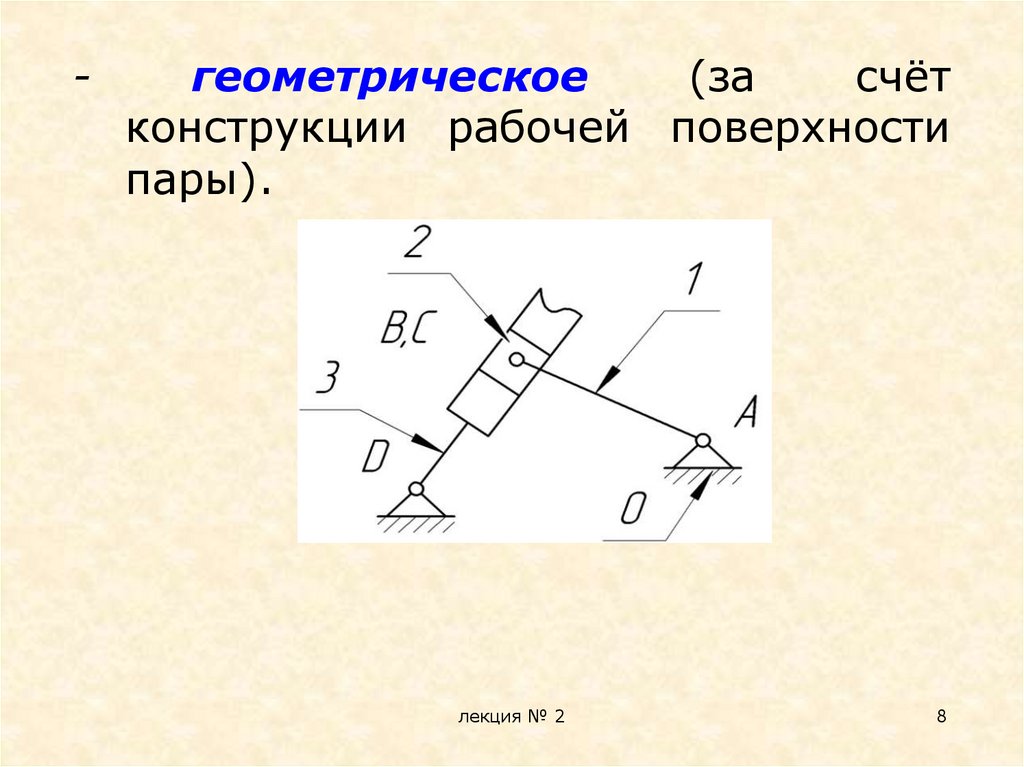
-геометрическое
(за
счёт
конструкции рабочей поверхности
пары).
лекция № 2
8
9.
4. По числу условий связи (S),накладываемых на относительное движение
звеньев пары делятся на 5 классов (число
условий связи определяет класс КП):
1-й класс - S = 1;
2-й класс - S = 2;
3-й класс - S = 3;
4-й класс - S = 4;
5-й класс - S = 5.
лекция № 2
9
10.
5. По числу степеней подвижности(W):
- 5-подвижные (W = 5);
- 4-подвижные (W = 4);
- 3-подвижные (W = 3);
- 2-подвижные (W = 2);
- 1-подвижные (W =1).
лекция № 2
10
11.
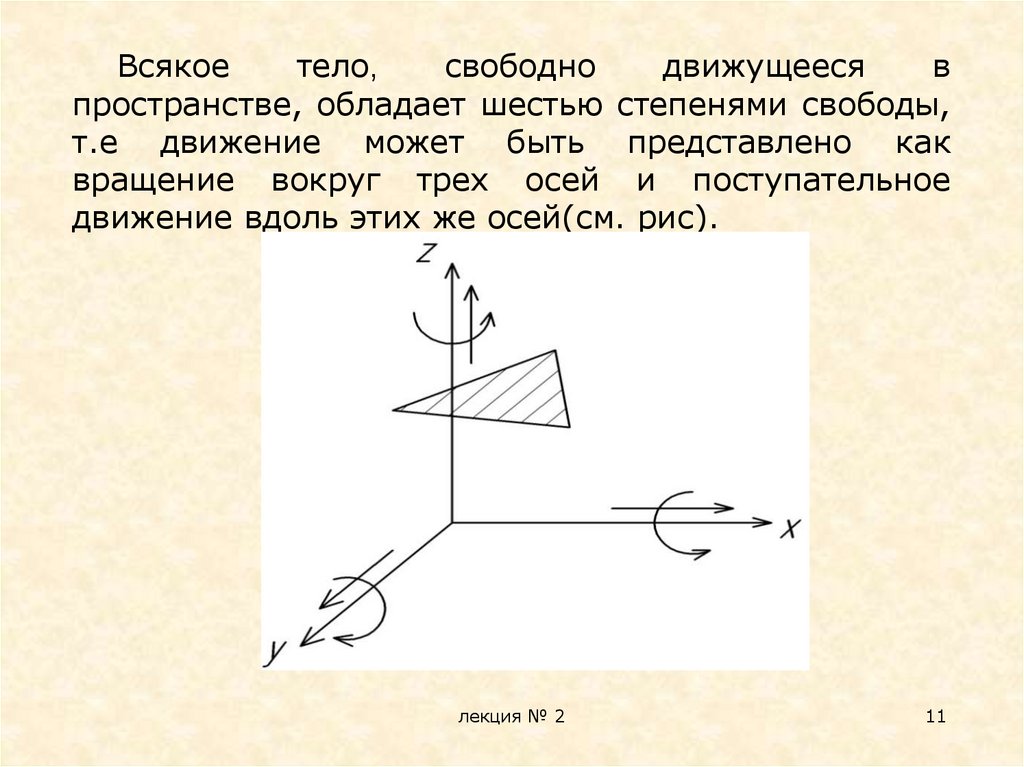
Всякоетело,
свободно
движущееся
в
пространстве, обладает шестью степенями свободы,
т.е движение может быть представлено как
вращение вокруг трех осей и поступательное
движение вдоль этих же осей(см. рис).
лекция № 2
11
12.
Если звено не входит в кинематическую пару,т.е. является свободным телом, то у него нет
никаких ограничений движению: S=0, где S –
число условий связи.
Если наложить 6 связей, то звенья теряют
относительную неподвижность и получается
жесткое соединение, т.е. кинематической пары не
станет (нет относительного движения звеньев):
S=6.
Следовательно, число условий связи, наложенных
на относительное движение звеньев, находится в
пределах 1 ≤S≤ 5. Поскольку число связей
меняется от 1 до 5, существует 5 классов
кинематических пар.
Число степеней подвижности пары равно W = 6 – S.
лекция № 2
12
13. Примеры кинематических пар, согласно классификации, приведенной выше:
КП 1-го класса:S = 1; W = 5; высшая
шар - плоскость
лекция № 2
13
14.
КП 2-го класса:S = 2; W = 4; высшая
шар - цилиндр
лекция № 2
14
15.
КП 3-го класса:S = 3; W = 3; низшая
- плоскостная КП
- сферическая КП
лекция № 2
15
16.
КП 4-го класса:S = 4; W = 2; низшая
- сферическая с пальцем;
- цилиндрическая.
лекция № 2
16
17.
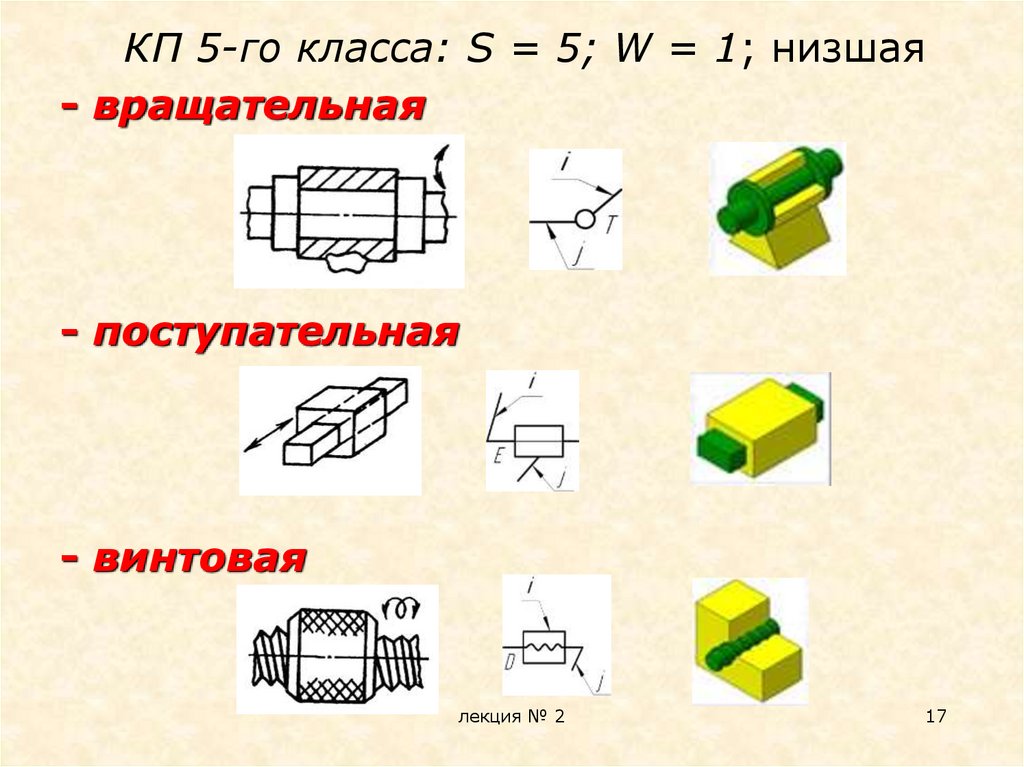
КП 5-го класса: S = 5; W = 1; низшая- вращательная
- поступательная
- винтовая
лекция № 2
17
18.
2. Кинематическая цепь.Структурные формулы
кинематической цепи и плоских
механизмов
Все механизмы состоят из совокупности
звеньев, связанных кинематическими парами.
Кинематическая цепь - это система
звеньев,
образующих
между
собой
кинематические пары.
лекция № 2
18
19.
Кинематические цепи различаютпо следующим признакам:
- незамкнутые и замкнутые;
- простые и сложные;
- плоские и пространственные.
лекция № 2
19
20.
В незамкнутой цепи имеютсязвенья, входящие только в одну КП
(а, в).
лекция № 2
20
21.
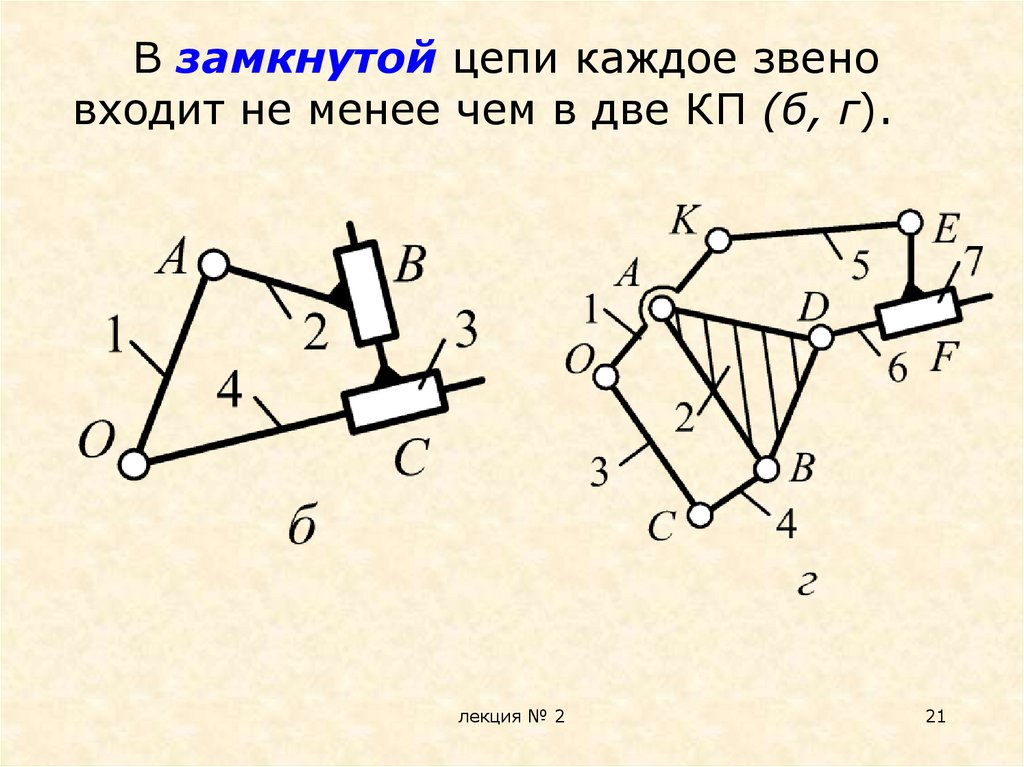
В замкнутой цепи каждое звеновходит не менее чем в две КП (б, г).
лекция № 2
21
22.
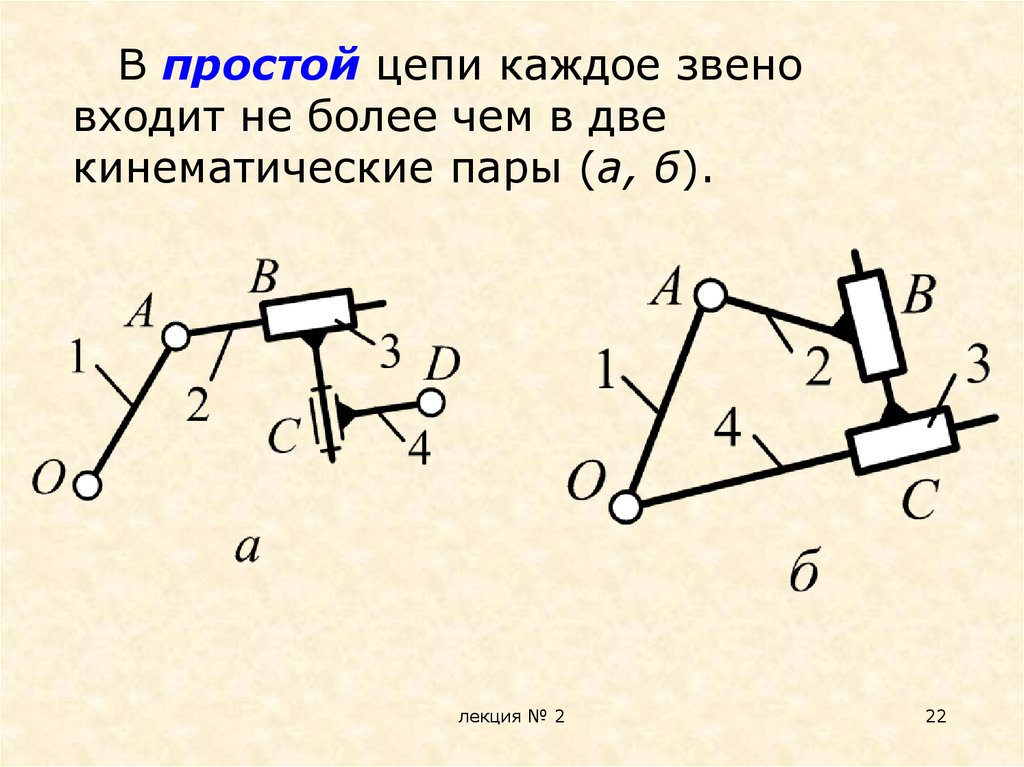
В простой цепи каждое звеновходит не более чем в две
кинематические пары (а, б).
лекция № 2
22
23.
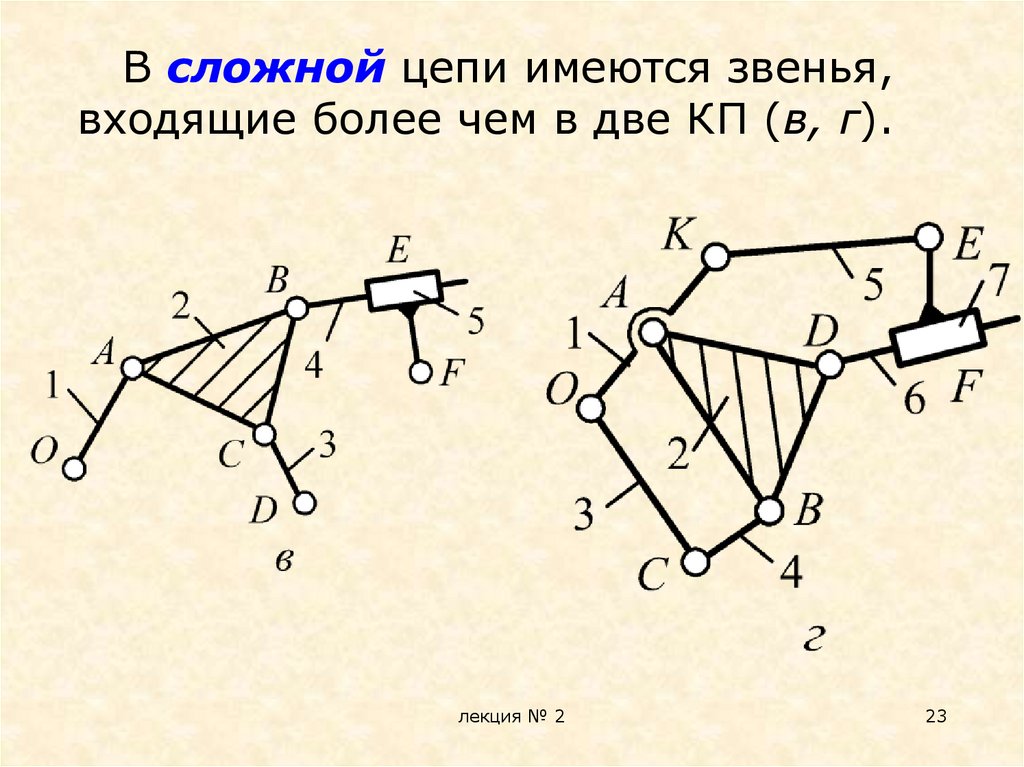
В сложной цепи имеются звенья,входящие более чем в две КП (в, г).
лекция № 2
23
24.
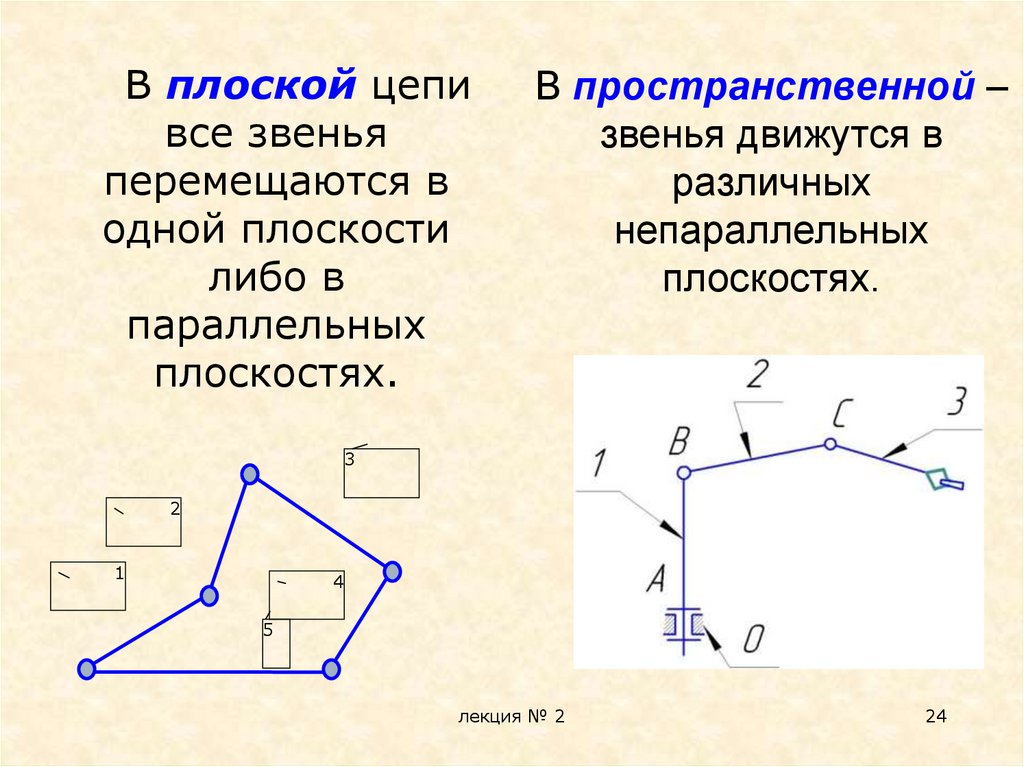
В плоской цепивсе звенья
перемещаются в
одной плоскости
либо в
параллельных
плоскостях.
В пространственной –
звенья движутся в
различных
непараллельных
плоскостях.
3
2
1
4
5
лекция № 2
24