


 Механика
МеханикаПохожие презентации:




")





Механизмы с пассивными звеньями и избыточными связями. Лекция №3
1. Лекция №3
Теория механизмов и машинЛекция №3
МЕХАНИЗМЫ С ПАССИВНЫМИ ЗВЕНЬЯМИ
И ИЗБЫТОЧНЫМИ СВЯЗЯМИ
Краткое содержание: Понятие о пассивных звеньях и
избыточных связях. Графы и структурные преобразования
механизмов. Механизмы с пассивными звеньями и избыточными
связями. Закон образования механизмов. Рациональная
структура механизма. Методы определения и устранения
избыточных связей и местных подвижностей. Примеры.
Кафедра ТММ
2. Пассивные связи
Теория механизмов и машинПассивные связи
Звенья, присоединение которых к механизму не меняет его исходной
подвижности, называются пассивными. Пассивные звенья вводятся в рычажных
механизмах в основном для обеспечения определенности их движения и
повышения жесткости конструкции.
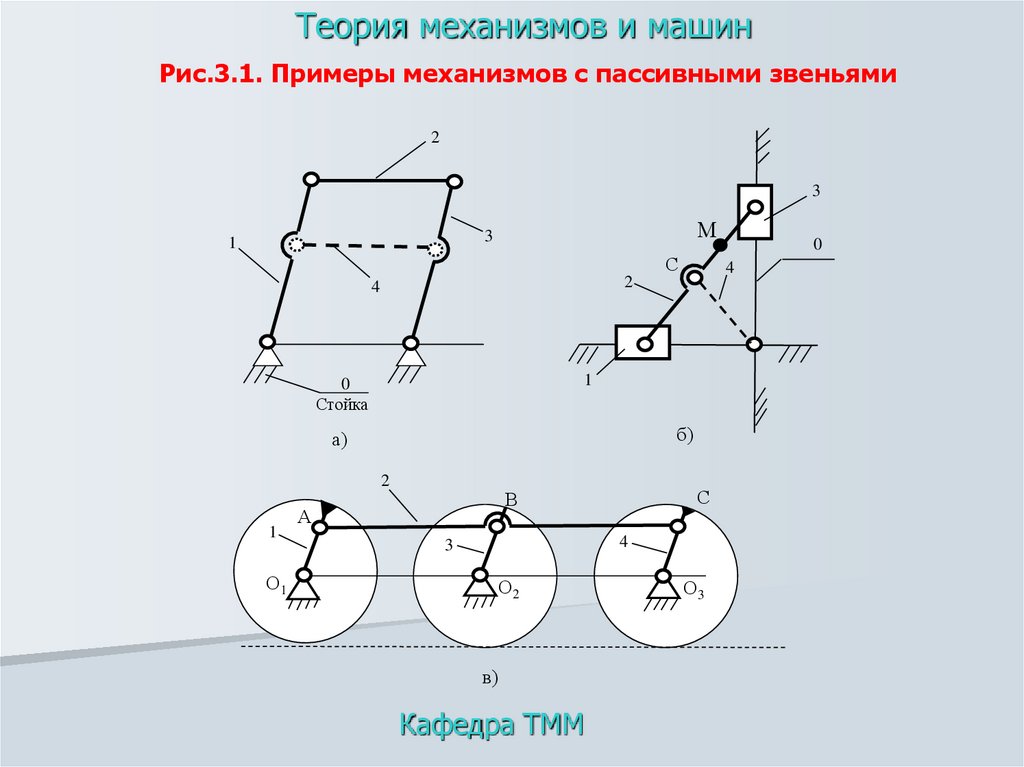
Например, в шарнирном параллелограмме (см.
2
рис. слева) введение пассивного звена 4 и
кинематических пар 1-4 и 3-4 исключает
неопределенность движения ведомого звена 3
из положения, когда все звенья вытягиваются
3
1
в одну линию.
4
0
Стойка
В этом случае подсчет числа степеней
подвижности по формуле (2.2 – см. лекцию 2)
приводит к результату W =0, а именно:
W 3N 2 p p 3 4 2 6 1 0 0
5 4
Однако механизм сохраняет подвижность.
В связи с этим при определении числа степеней подвижности по уравнениям (2.1 и 2.2 – см.
лекцию 2) необходимо предварительно выявить в механизме пассивные звенья и исключить
их из расчета. Также необходимо исключить из расчета и кинематические пары,
используемые при введении в механическую систему пассивных звеньев и создающие
избыточные связи (в данном примере КП 1-4 и 3-4).
Кафедра ТММ
3.
Теория механизмов и машинРис.3.1. Примеры механизмов с пассивными звеньями
2
3
М
3
1
С
1
0
Стойка
б)
а)
2
1
О1
4
2
4
С
В
А
4
3
О2
в)
Кафедра ТММ
0
О3
4.
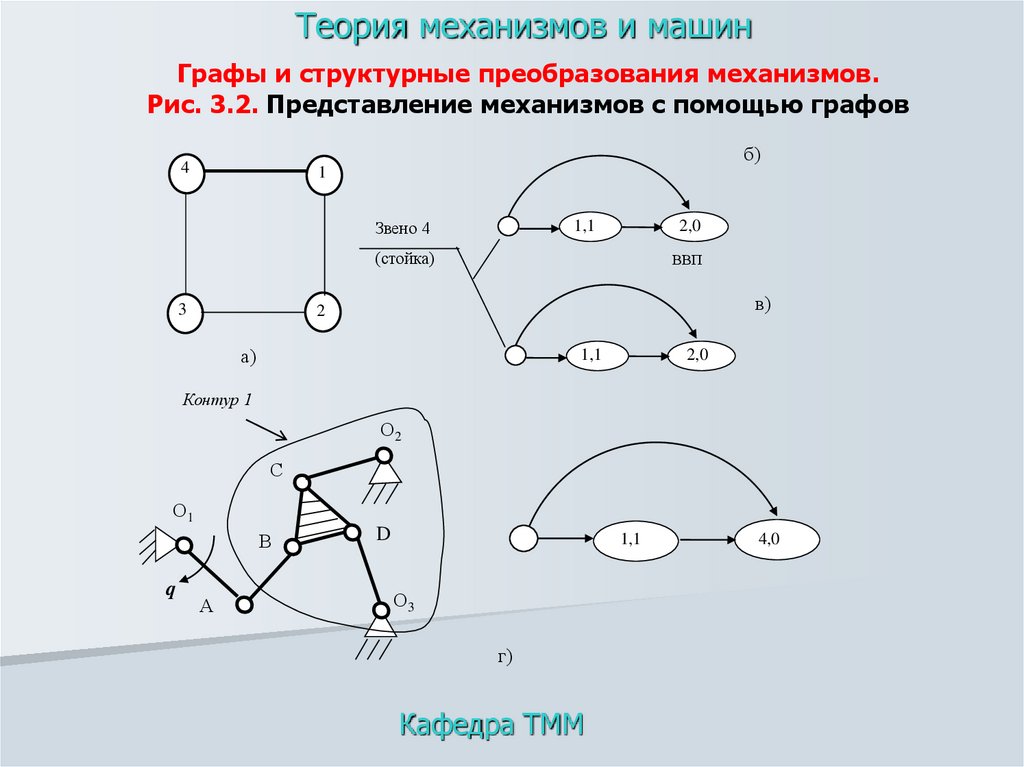
Теория механизмов и машинГрафы и структурные преобразования механизмов.
Рис. 3.2. Представление механизмов с помощью графов
б)
4
1
Звено 4
1,1
2,0
(стойка)
3
ВВП
в)
2
а)
1,1
2,0
Контур 1
О2
С
О1
В
q
А
D
1,1
О3
г)
Кафедра ТММ
4,0
5.
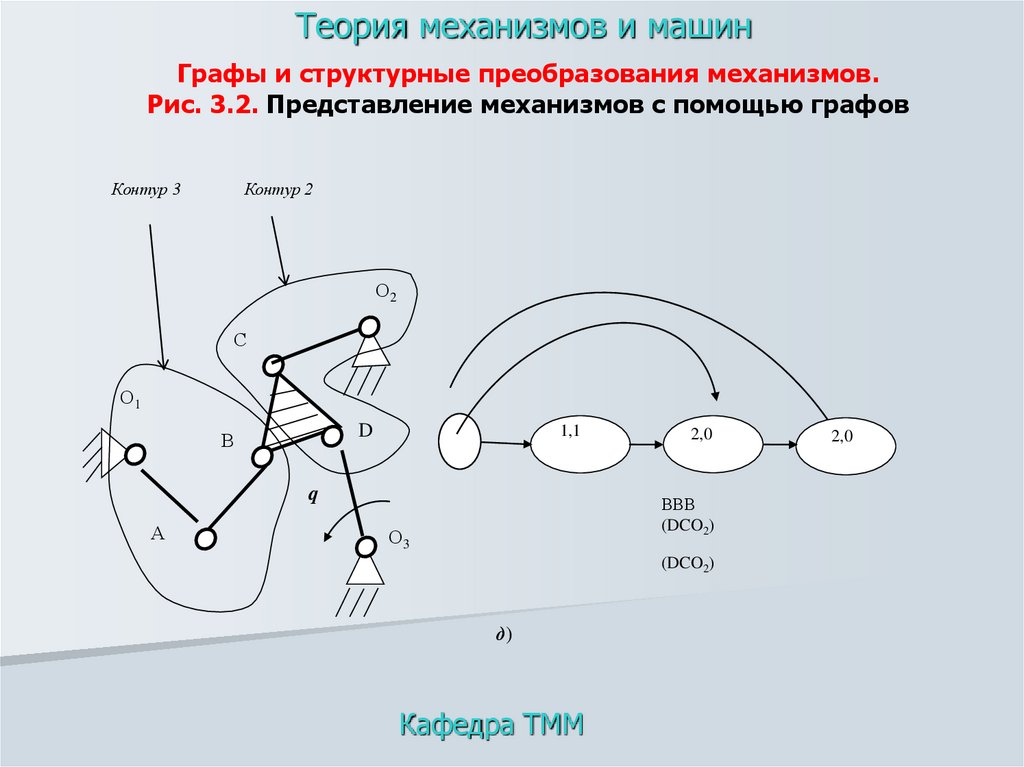
Теория механизмов и машинГрафы и структурные преобразования механизмов.
Рис. 3.2. Представление механизмов с помощью графов
Контур 3
Контур 2
О2
С
О1
D
В
1,1
q
А
2,0
ВВВ
(DCO2)
О3
(DCO2)
д)
Кафедра ТММ
2,0
6.
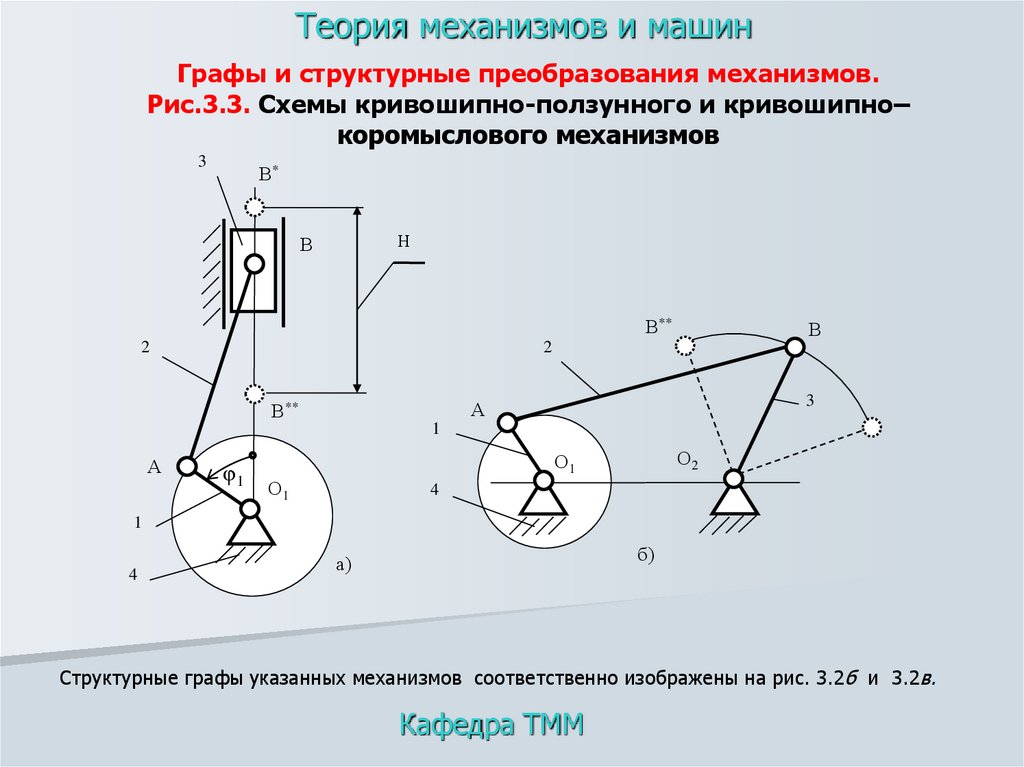
Теория механизмов и машинГрафы и структурные преобразования механизмов.
Рис.3.3. Схемы кривошипно-ползунного и кривошипно–
коромыслового механизмов
3
В*
Н
В
В**
2
В
2
3
А
В**
1
А
φ1
О2
О1
О1
4
1
4
б)
а)
Структурные графы указанных механизмов соответственно изображены на рис. 3.2б и 3.2в.
Кафедра ТММ
7.
Теория механизмов и машинНеявные избыточные связи
Посчитаем степень подвижности КПМ на рис. 3.3а по формуле 2.1 (по формуле Малышева):
W 6 3 5 4 2
Таким образом , кинематическая цепь такого вида в пространственных условиях как механизм
существовать не может (как пример - при непараллельности осей А и В). Это связано с
наличием в нем избыточных связей, количество которых определяется по формуле:
(2.3)
q W 5 p 4 p 3 p 2 p p 6n
5
4
3
2
1
где W- требуемая (планируемая) степень подвижности механизма;
n – количество подвижных звеньев.
1 5 4 6 3 3
Произведем вычисления: q W 5 p
, т.е. в механизме присутствует
5
три избыточные связи. Для их устранения и тем самым обеспечения W=1 понизим класс
кинематических пар 1-2 и 0-3 (рис. 3.4).
2
3
1
0
0 – 3 – Цилиндрический шарнир-2Ц-(КП 4-ого класса);
0-1, 2-3 Вращ. КП -1В - (КП 5-ого класса);
1-2 – Сферич. шарнир -3С- (КП 3-его класса).
Рис. 3.4 Схема механизма с одной избыточной связью
Кафедра ТММ