


















































 Физика
Физика Электроника
ЭлектроникаПохожие презентации:










Теория автоматического управления. (Часть 1)
1.
2.
Учебный курс«Теория Автоматического Управления»
Часть 1
Автор курса – доцент, кандидат технических наук
Обухов Павел Серафимович
Электронные ресурсы курса находятся на сайтах:
• http://de.dstu.edu.ru/, можно зайти также с официального сайта университета
http://www.donstu.ru/ в разделе образование/дистанционное образование - пароль cdodstu
• http://www.dstu-app.ru/ и http://www.dstu-smc-app.ru
3.
Классическая ТАУ• Основные понятия и определения теории управления
• Математическое описание объектов и систем управления
• Структурные представления и анализ в теории управления
• Временные и частотные характеристики динамических объектов и систем
• Исследование одноконтурных систем автоматического управления (САУ)
• Синтез САУ методом типовых регуляторов
• Построение областей устойчивости САУ в плоскости их параметров
• Оценка качества управления в линейных автоматических системах
4.
Основные понятия и определения теории управления:• Джеймс Уатт
• Основные понятия и определения теории управления
• Общая функциональная структура САУ
• Фундаментальные принципы управления
• Классификация САУ
5.
Математическое описание объектов и систем управления• Основные понятия и определения
• Вход - выходные формы математического описания
объектов и систем управления
• Определение передаточной функции
• Свойства передаточной функции динамического звена
• Типовые (элементарные) динамические звенья
6.
Структурные представления и анализ в теории управления• Основные понятия и определения
• Основные типы соединения звеньев в САУ
• Основные правила структурных преобразований
7.
Временные и частотные характеристики динамическихобъектов и систем
• Основные понятия и определения
• Специальные функции
• Переходные и импульсные переходные характеристики
• Частотные характеристики линейных динамических звеньев и систем
• Частотные характеристики типовых звеньев
• Логарифмические частотные характеристики динамических объектов и
систем
• ЛАЧХ и ЛФЧХ типовых звеньев
• Построение логарифмических частотных характеристик (ЛЧХ) сложных
динамических звеньев
• Нетиповые динамические звенья
8.
Исследование одноконтурныхсистем автоматического управления (САУ)
• Основные понятия и определения
• Понятие устойчивости
• Качественная оценка
• Алгебраические критерии оценки устойчивости
• Частотные критерии оценки устойчивости
• Понятие инженерных запасов
9.
Синтез САУ методом типовых регуляторов• Виды регуляторов:
• Пропорциональный
• Интегрирующий
• Пропорционально – интегральный
• Пропорционально – дифференциальный
• Пропорционально – интегрально - дифференциальный
10.
Построение областей устойчивости САУв плоскости их параметров
• Основные понятия и определения
• Однопараметрическое D-разбиение
• Двухпараметрическое D-разбиение
11.
Оценка качества управления в линейных автоматическихсистемах
• Основные понятия и определения
• Методы оценки качества и виды испытываемых воздействий для оценки:
• Прямые методы:
• Оценка по переходному процессу
• Исследование точности установившихся режимов воспроизведения
методом коэффициентов ошибок
• Косвенные (приближенные) методы
• Оценка колебательности замкнутой системы по максимуму АЧХ
• Оценка быстродействия замкнутой системы по частоте среза ЛАЧХ разомкнутой
системы
• Корневые методы косвенной оценки качества системы управления
12.
Джеймс Уатт (James Watt)Родился 19 января 1736 г (1736-1819), выдающийся
шотландский инженер и изобретатель, прославившийся прежде
всего как создатель усовершенствованной паровой машины.
13.
Основные понятия и определения курса ТАУЦель курса ТАУ – ознакомление с принципами построения систем
автоматического управления и методами исследования процессов, в них
протекающих.
Управление – целенаправленное воздействие на что-либо.
Управление является автоматическим, если оно осуществляется
без вмешательства человека, с помощью специальных технических средств.
Разработка общих принципов создания таких устройств является задачей ТАУ.
14.
Структура формирования САУСАУ – совокупность объекта управления и управляющего устройства
V (F)
Z (G)
U
Управляющее
устройство
U – управляющее воздействие
Z(G) - задающее воздействие
Y
Объект
управления
V(F) - возмущающее воздействие
Y – выходные переменные
15.
Объект управления - это совокупность материальных объектов,специальных технических средств, носителей вещества или энергии, среди
которых осуществляется некоторый технологический процесс, нуждающийся
в управлении.
Устройство управления - это устройство, в котором
вырабатываются воздействия, называемые управляющими.
Все переменные можно разделить на две группы:
внутренние и внешние.
Внутренние переменные - такие переменные, которые
характеризуют технологию протекающих в объекте или системе
процессов, то есть его состояние (обозначается X).
Внешние переменные - такие переменные, которые могут
меняться независимо от состояния объекта и влиять на процессы в нем
протекающие.
Назначение САУ состоит в обеспечении с возможно большей
точностью определенной заранее предписанной взаимосвязи управляемых
величин Y с задающими воздействиями Z и более полном подавлении
влияния возмущающих воздействий и помех V, если они есть.
16.
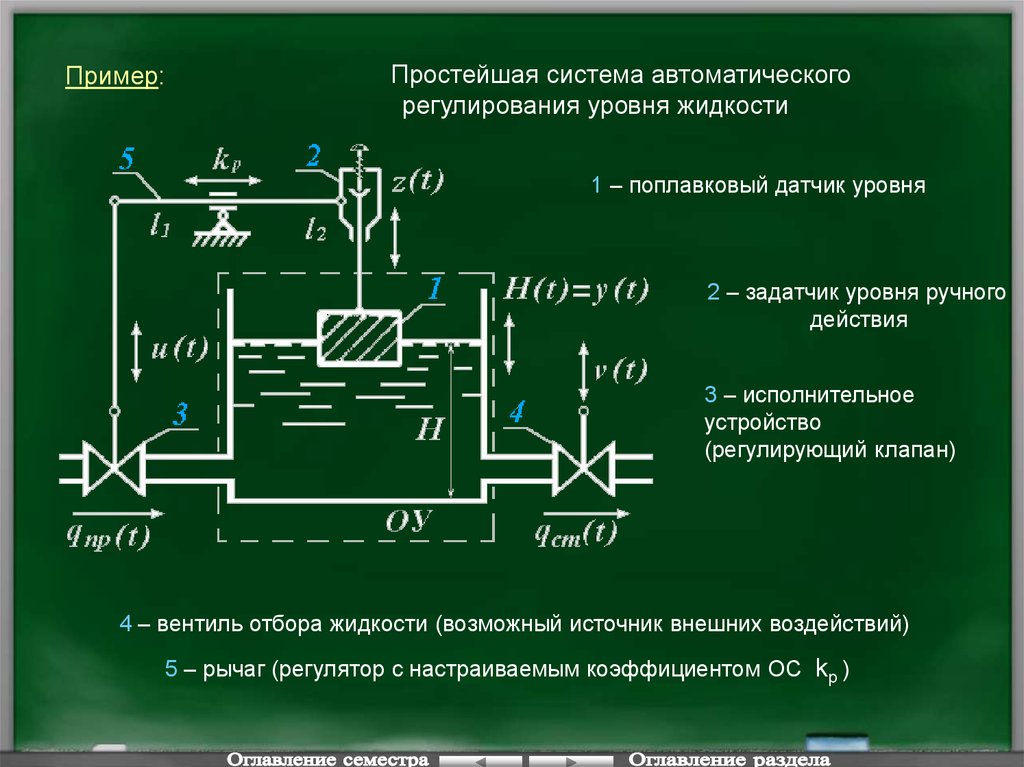
Пример:Простейшая система автоматического
регулирования уровня жидкости
1 – поплавковый датчик уровня
2 – задатчик уровня ручного
действия
3 – исполнительное
устройство
(регулирующий клапан)
4 – вентиль отбора жидкости (возможный источник внешних воздействий)
5 – рычаг (регулятор с настраиваемым коэффициентом ОС kp )
17.
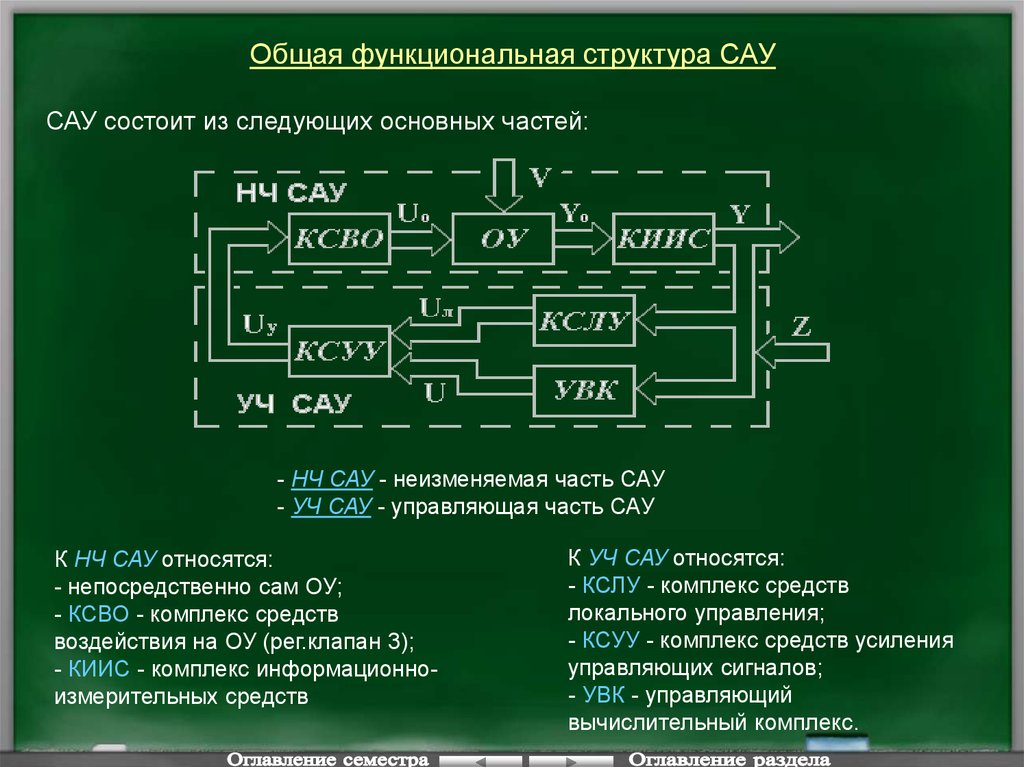
Общая функциональная структура САУСАУ состоит из следующих основных частей:
- НЧ САУ - неизменяемая часть САУ
- УЧ САУ - управляющая часть САУ
К НЧ САУ относятся:
- непосредственно сам ОУ;
- КСВО - комплекс средств
воздействия на ОУ (рег.клапан 3);
- КИИС - комплекс информационноизмерительных средств
К УЧ САУ относятся:
- КСЛУ - комплекс средств
локального управления;
- КСУУ - комплекс средств усиления
управляющих сигналов;
- УВК - управляющий
вычислительный комплекс.
18.
Фундаментальные принципы управленияДва основных принципа:
1. Принцип разомкнутого управления
(управление по внешнему воздействию)
2. Принцип замкнутого управления
(управление по отклонению)
Принцип разомкнутого управления может реализоваться в двух видах:
- управление по заданию
- управление по возмущению
Достоинства: - прямой характер управления (быстродействие)
- простота
- надежность
Недостатки:
- низкая точность (большое количество неконтролируемых
воздействий)
- нестационарность характеристик объектов управления
- громоздкость управляющего устройства при большом количестве
внешних воздействий
19.
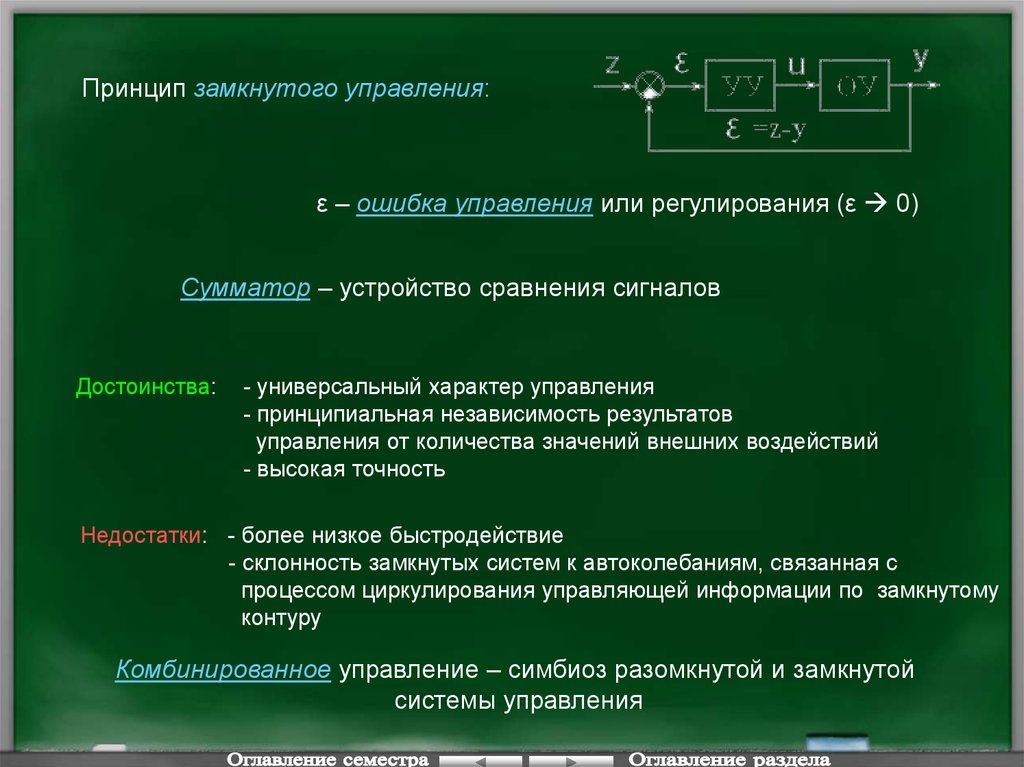
Принцип замкнутого управления:ε – ошибка управления или регулирования (ε 0)
Сумматор – устройство сравнения сигналов
Достоинства:
- универсальный характер управления
- принципиальная независимость результатов
управления от количества значений внешних воздействий
- высокая точность
Недостатки: - более низкое быстродействие
- склонность замкнутых систем к автоколебаниям, связанная с
процессом циркулирования управляющей информации по замкнутому
контуру
Комбинированное управление – симбиоз разомкнутой и замкнутой
системы управления
20.
Классификация САУКлассификацию САУ можно производить по различным принципам и
признакам, но наиболее общую классификацию моно представить в виде
схемы, изображенной на рисунке.
21.
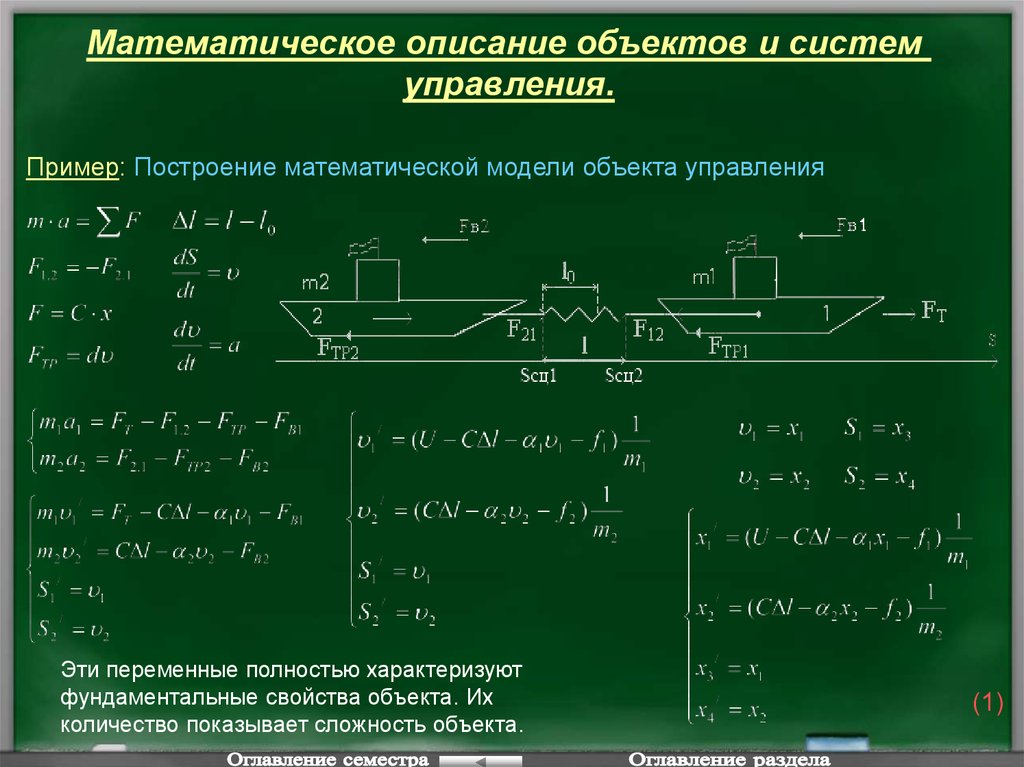
Математическое описание объектов и системуправления.
Пример: Построение математической модели объекта управления
Эти переменные полностью характеризуют
фундаментальные свойства объекта. Их
количество показывает сложность объекта.
(1)
22.
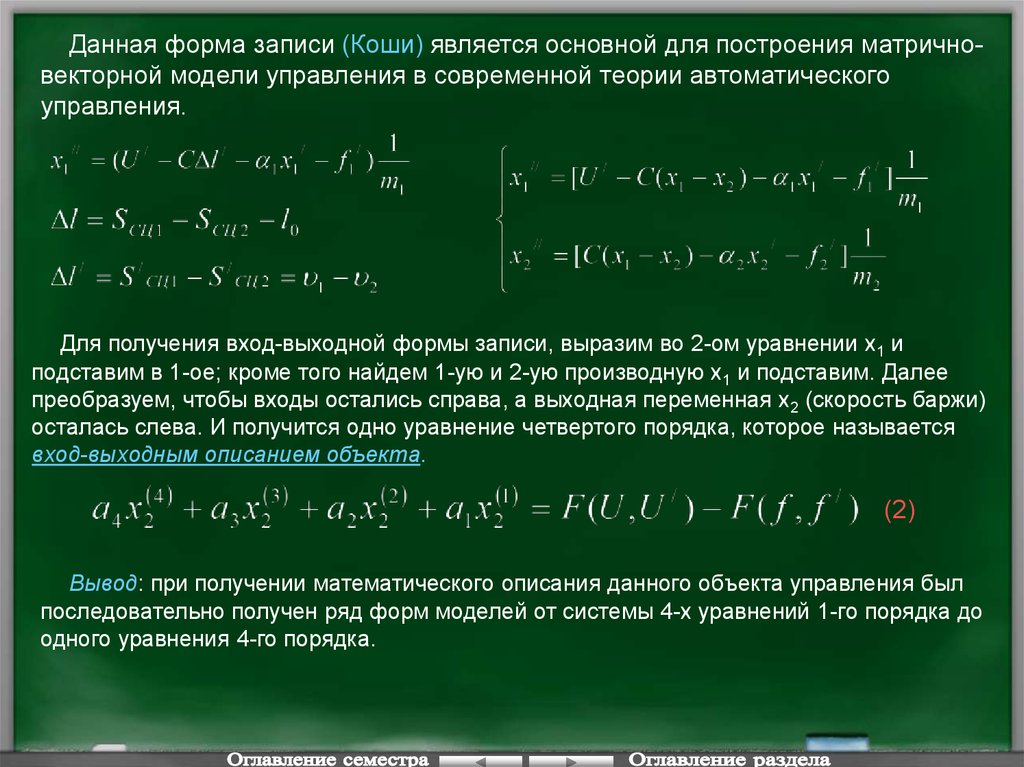
Данная форма записи (Коши) является основной для построения матричновекторной модели управления в современной теории автоматическогоуправления.
Для получения вход-выходной формы записи, выразим во 2-ом уравнении х1 и
подставим в 1-ое; кроме того найдем 1-ую и 2-ую производную х1 и подставим. Далее
преобразуем, чтобы входы остались справа, а выходная переменная х2 (скорость баржи)
осталась слева. И получится одно уравнение четвертого порядка, которое называется
вход-выходным описанием объекта.
(2)
Вывод: при получении математического описания данного объекта управления был
последовательно получен ряд форм моделей от системы 4-х уравнений 1-го порядка до
одного уравнения 4-го порядка.
23.
Форма (1) содержала 4 переменных состояния, которые, при сделанных допущениях,полностью описывали в каждый момент времени состояние механической системы.
Форма (2) получена исключением переменных состояний и приведения к одному
уравнению, разрешенному относительно одной интересующей нас переменной,
являющейся выходом объекта. При этом все входные воздействия были сохранены.
Форма (1) является более полной по сравнению с формой (2).
Форма (2) менее полная, чем исходная, но ее использование облегчает и упрощает
многие преобразования и анализ. Она используется в классической теории управления.
Математической моделью является выражение или система выражений, в которых
буквенными символами обозначены реальные физические переменные, изменяющиеся
в процессе функционирования объекта, а символами математических операций
отображаются реальные физические законы преобразования этих переменных в
объекте.
В результате изменение состояния переменных в реальном объекте и решение
математической модели этого объекта должны давать численно совпадающие
результаты. Степень совпадения этих результатов указывает на степень адекватности
математической модели ее техническому оригиналу.
24.
Построение математической модели является первым и очень важным этапом впроцессе проектирования САУ. Последующие этапы сводятся к анализу и преобразованию
математической модели.
Основной трудностью использования дифференциальной формы описания объектов и
систем является сложность и громоздкость решения ДУ, особенно нелинейных и в
частных производных. А подавляющее большинство технических объектов описывается
именно такими уравнениями. Поэтому такие математической модели стараются
упростить. Самым простой способ упрощения является процедура линеаризации, так как
для линейных ДУ в математике и для линейных объектов в ТАУ существуют хорошо
развитые операторные методы анализа и синтеза.
Для того, чтобы линеаризовать нелинейную ММ, необходимо, чтобы линеаризуемся
функция была дифференцируема на всем протяжении (не имела разрывов и
неоднозначности). Тогда ее можно разложить в ряд Тейлора в окрестности произвольно
выбранной точки (для САУ - это обычно положение равновесия ).
- положение равновесия
25.
Разложение осуществляется по формуле:- отклонения переменных состояния от установившихся значений.
- сумма членов, которые содержат различные производные во второй и более
высших степенях и смешанных производных от функции в соответствующем аргументе
(этой частью разложения обычно пренебрегают).
26.
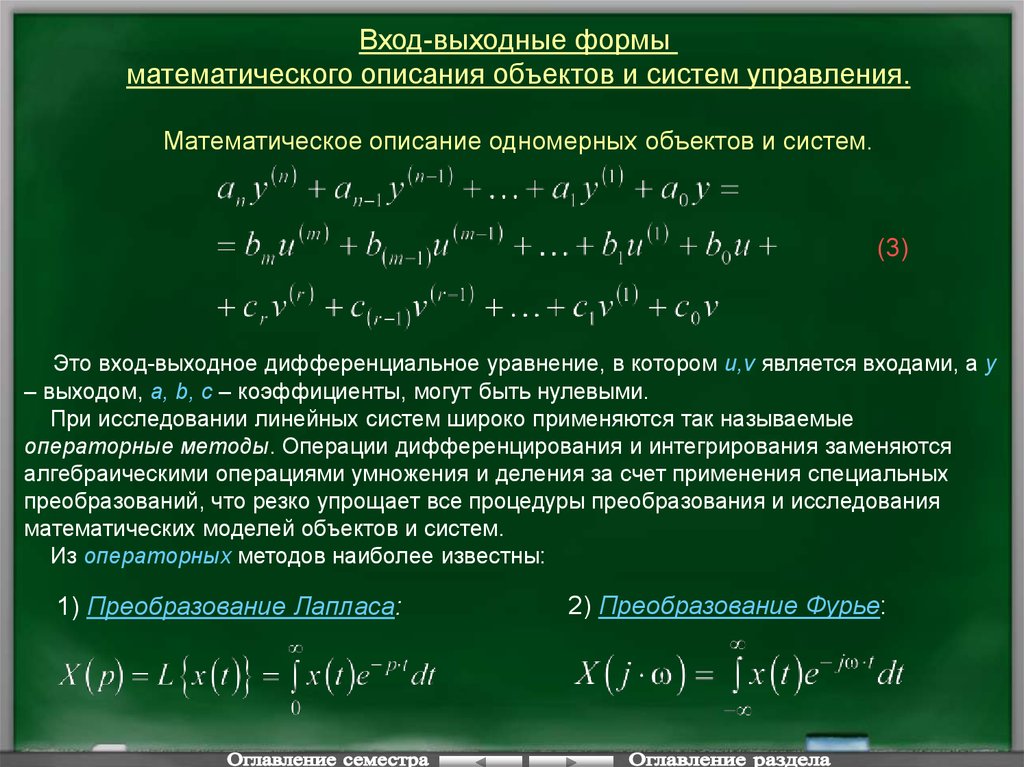
Вход-выходные формыматематического описания объектов и систем управления.
Математическое описание одномерных объектов и систем.
(3)
Это вход-выходное дифференциальное уравнение, в котором u,v является входами, а y
– выходом, a, b, c – коэффициенты, могут быть нулевыми.
При исследовании линейных систем широко применяются так называемые
операторные методы. Операции дифференцирования и интегрирования заменяются
алгебраическими операциями умножения и деления за счет применения специальных
преобразований, что резко упрощает все процедуры преобразования и исследования
математических моделей объектов и систем.
Из операторных методов наиболее известны:
1) Преобразование Лапласа:
2) Преобразование Фурье:
27.
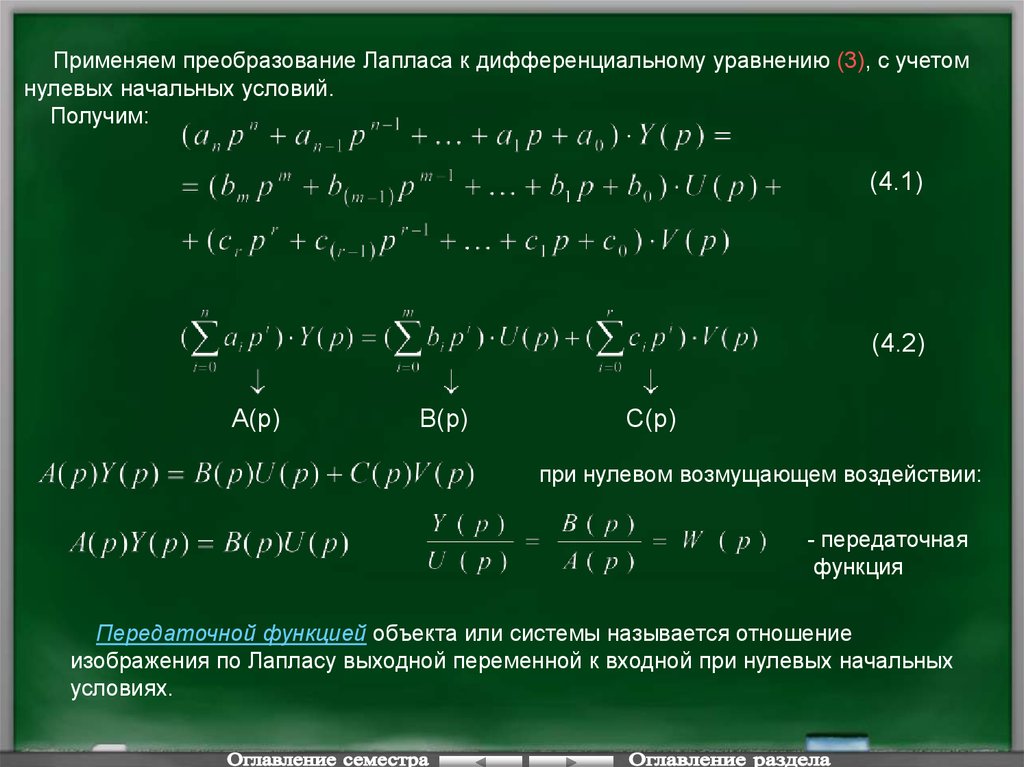
Применяем преобразование Лапласа к дифференциальному уравнению (3), с учетомнулевых начальных условий.
Получим:
(4.1)
(4.2)
A(p)
B(p)
C(p)
при нулевом возмущающем воздействии:
- передаточная
функция
Передаточной функцией объекта или системы называется отношение
изображения по Лапласу выходной переменной к входной при нулевых начальных
условиях.
28.
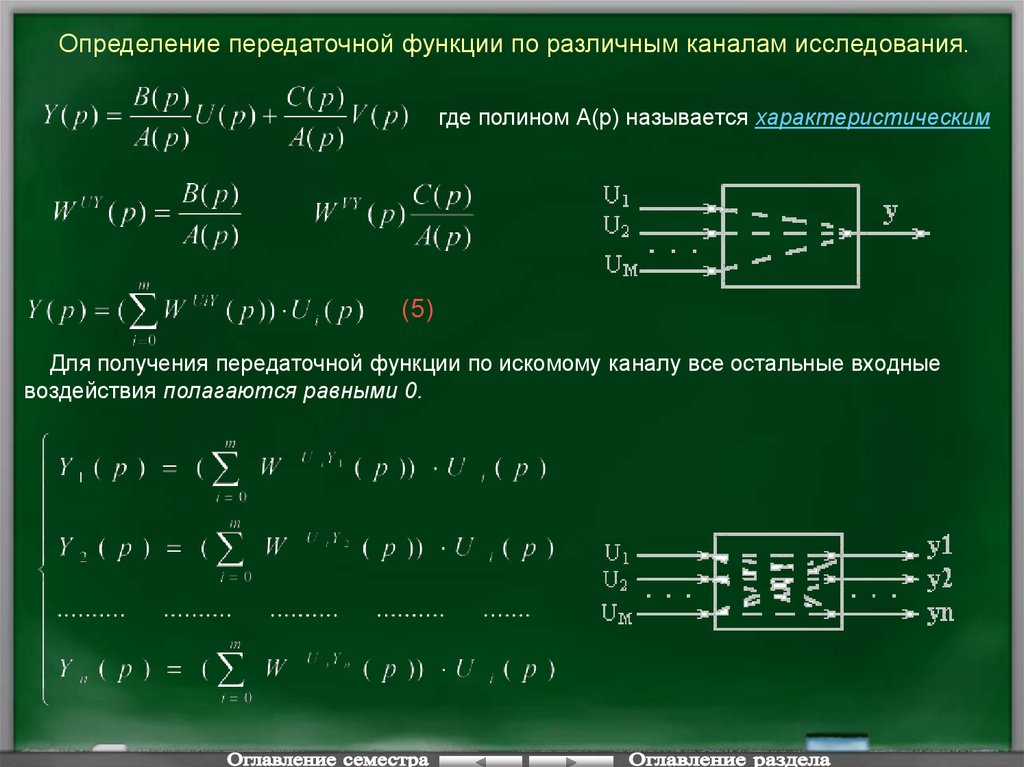
Определение передаточной функции по различным каналам исследования.где полином А(р) называется характеристическим
(5)
Для получения передаточной функции по искомому каналу все остальные входные
воздействия полагаются равными 0.
29.
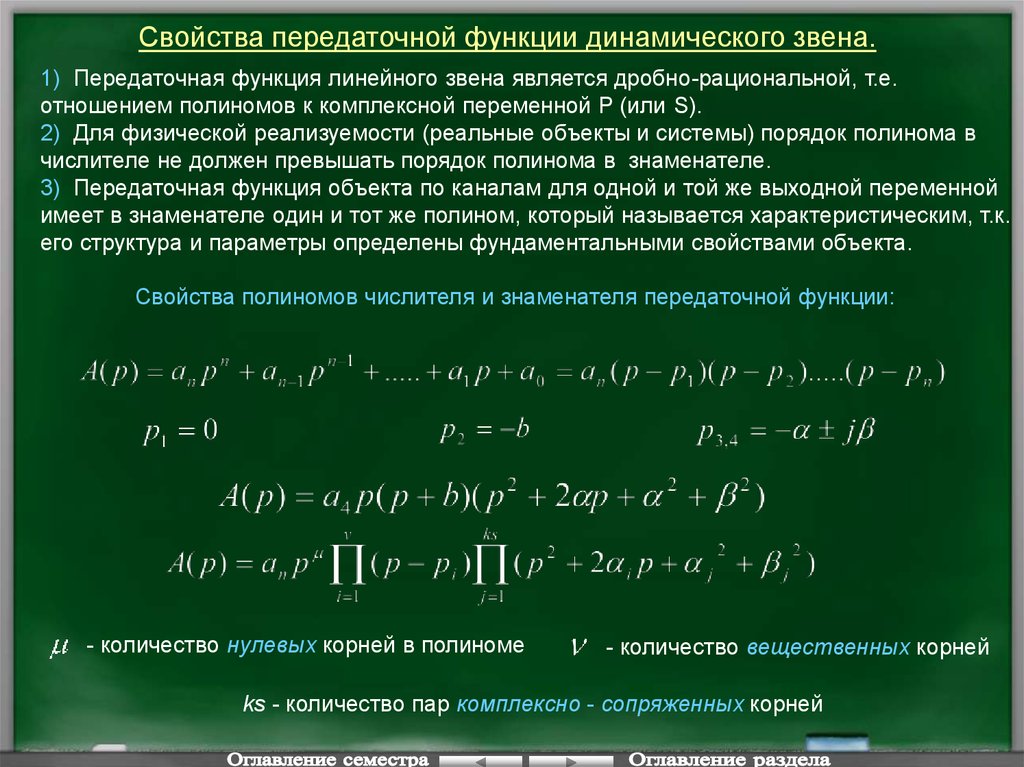
Свойства передаточной функции динамического звена.1) Передаточная функция линейного звена является дробно-рациональной, т.е.
отношением полиномов к комплексной переменной Р (или S).
2) Для физической реализуемости (реальные объекты и системы) порядок полинома в
числителе не должен превышать порядок полинома в знаменателе.
3) Передаточная функция объекта по каналам для одной и той же выходной переменной
имеет в знаменателе один и тот же полином, который называется характеристическим, т.к.
его структура и параметры определены фундаментальными свойствами объекта.
Свойства полиномов числителя и знаменателя передаточной функции:
- количество нулевых корней в полиноме
- количество вещественных корней
ks - количество пар комплексно - сопряженных корней
30.
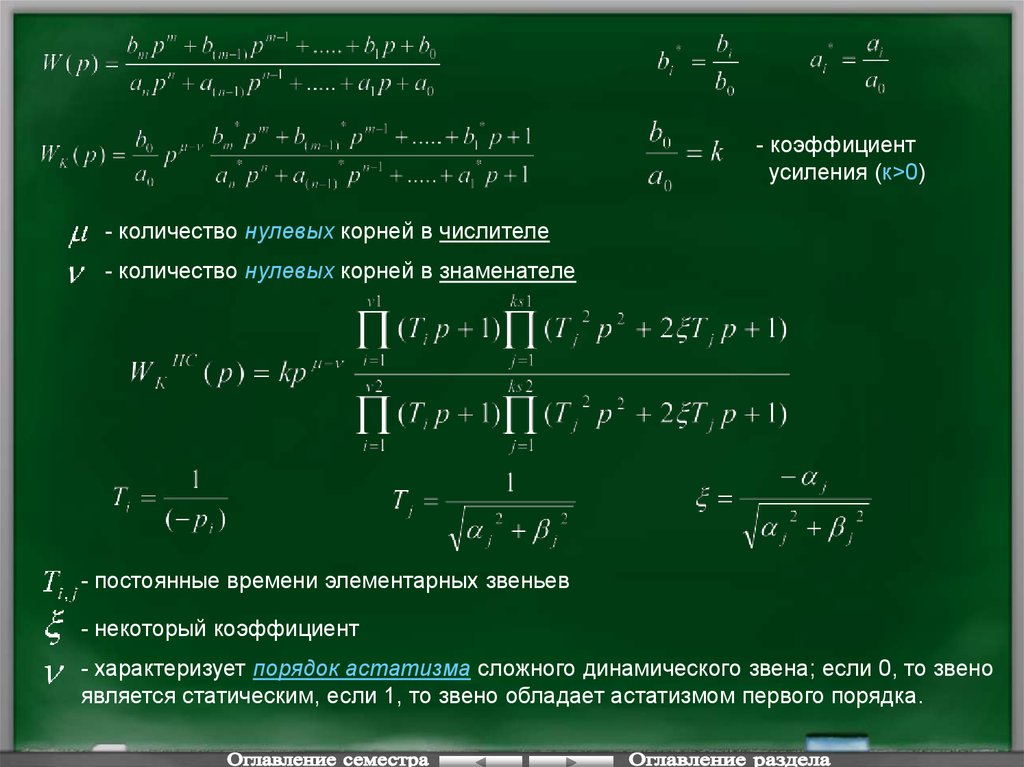
- коэффициентусиления (к>0)
- количество нулевых корней в числителе
- количество нулевых корней в знаменателе
- постоянные времени элементарных звеньев
- некоторый коэффициент
- характеризует порядок астатизма сложного динамического звена; если 0, то звено
является статическим, если 1, то звено обладает астатизмом первого порядка.
31.
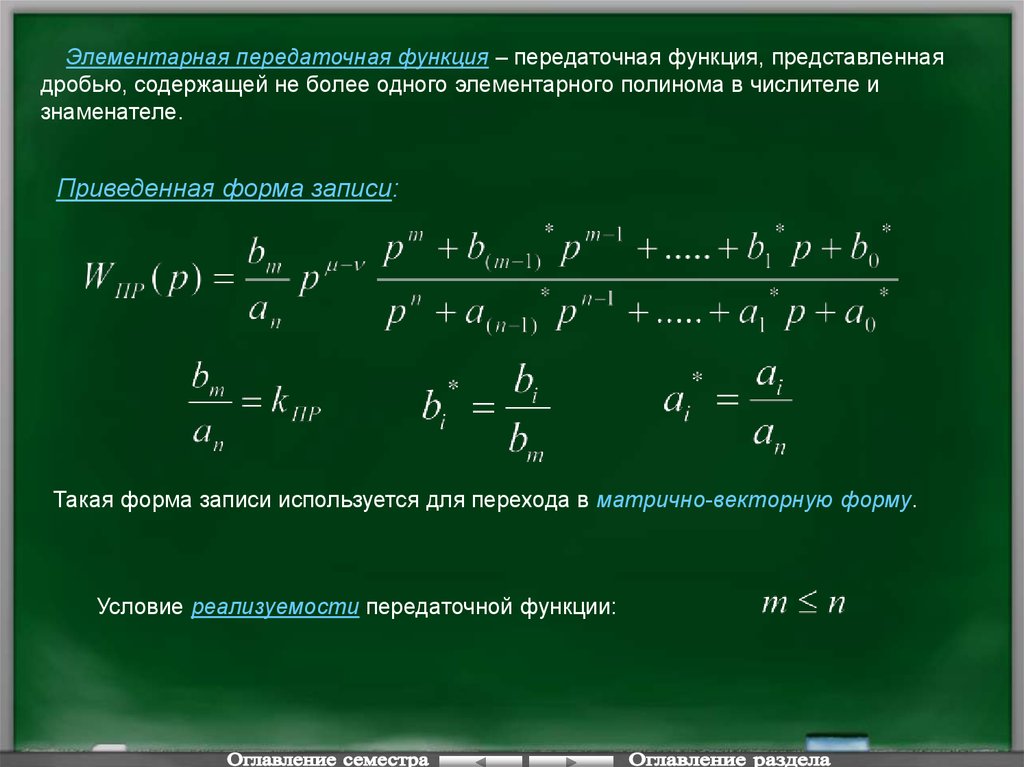
Элементарная передаточная функция – передаточная функция, представленнаядробью, содержащей не более одного элементарного полинома в числителе и
знаменателе.
Приведенная форма записи:
Такая форма записи используется для перехода в матрично-векторную форму.
Условие реализуемости передаточной функции:
32.
Типовые (элементарные) динамические звенья.1) Пропорциональное звено (ПЗ)
2) Дифференцирующее звено (ДЗ)
3) Интегрирующее звено (ИЗ)
4) Пропорционально-дифференцирующее звено (ПД)
5) Апериодическое звено (АЗ)
6) Пропорционально-дифференцирующее звено 2-го порядка (ПД2)
7) Колебательное звено (КЗ)
Звенья 1,3,5,7 – являются физически реализуемыми, т.е. реальными, а 2,4,6 –
физически не реализуемыми т.е. идеальными.
(но Т<<TД и Т 0)
33.
Структурные представления и анализв теории управления
Структурной схемой в ТАУ называется графическое изображение
математической модели автоматической системы в виде соединения звеньев.
Разбиение сложной передаточной функции на элементарные составляющие
(типовые звенья) не является чисто математическим приемом. Любое реальное
устройство физически или технологически может быть разбито на совокупность
динамических звеньев низкого порядка. Переход от реальных объектов (элементов)
САУ к их математическим моделям позволяет абстрагироваться от физически
принципов систем, поэтому структурная схема является основой универсальных
методов анализа и синтеза математических систем.
В структурных схемах переменные – стрелки, динамические звенья –
прямоугольники, а математическое изложение сигнала представляется специальными
знаками - сумматорами.
Структурные схемы являются самой наглядной формой математического
представления объектов и систем.
34.
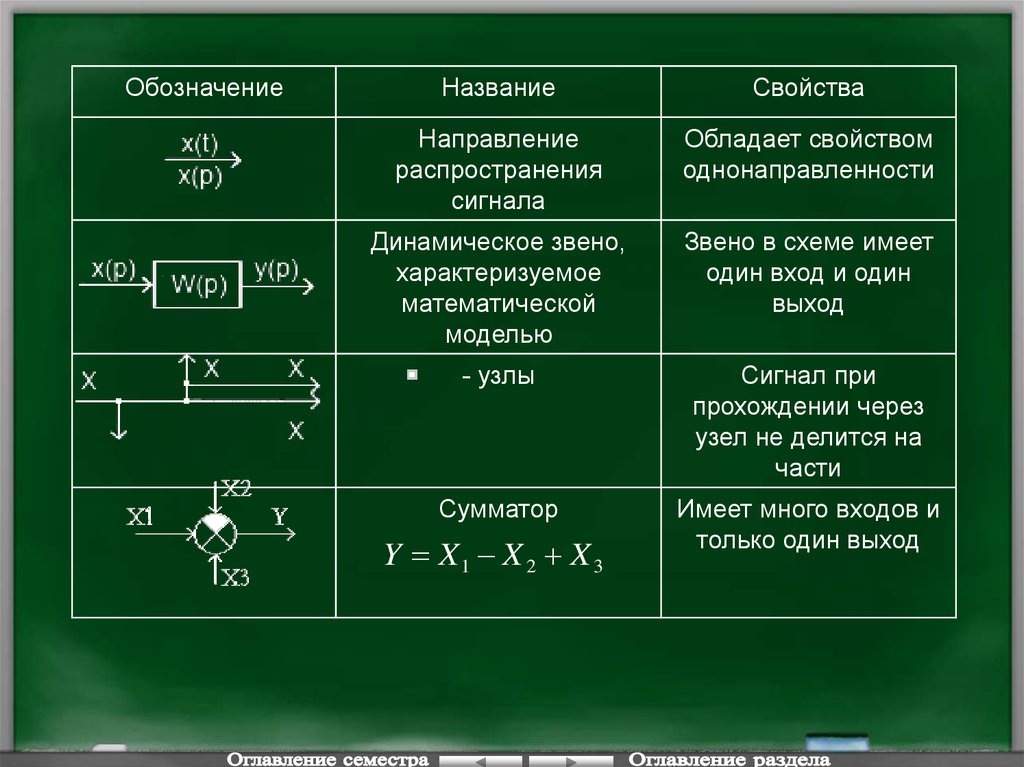
ОбозначениеНазвание
Свойства
Направление
распространения
сигнала
Обладает свойством
однонаправленности
Динамическое звено,
характеризуемое
математической
моделью
Звено в схеме имеет
один вход и один
выход
- узлы
Сигнал при
прохождении через
узел не делится на
части
Сумматор
Имеет много входов и
только один выход
Y X1 X 2 X 3
35.
Основные типы соединения звеньев в САУ1) Параллельное соединение
2) Последовательное соединение
3) Обратная связь
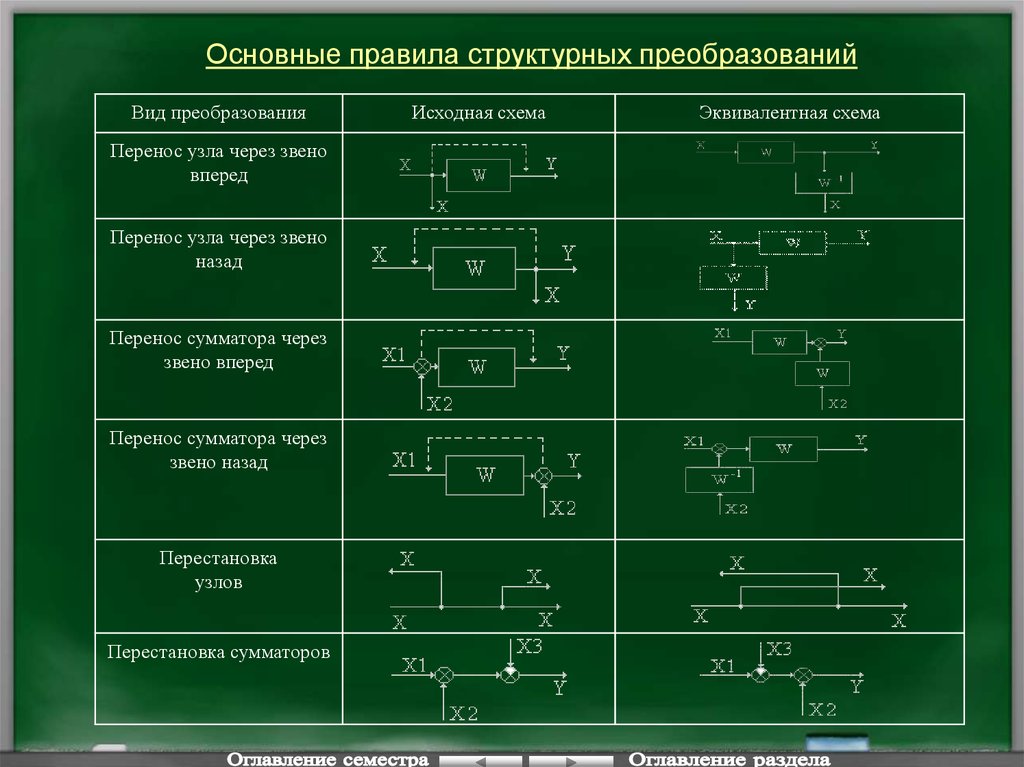
36.
Основные правила структурных преобразованийВид преобразования
Перенос узла через звено
вперед
Перенос узла через звено
назад
Перенос сумматора через
звено вперед
Перенос сумматора через
звено назад
Перестановка
узлов
Перестановка сумматоров
Исходная схема
Эквивалентная схема
37.
Суть этих преобразований сводится к целенаправленному переносуэлементов структурных схем (звеньев, узлов, сумматор) друг через друга,
но так чтобы результирующая передаточная функция не изменилась.
Замечание:
Не всякая структурная схема упрощается до типовой.
Рассмотренными выше методами преобразования, иногда приходится
переносить узел через сумматор, тогда эквивалентные преобразования
применять не рекомендуется, так как проще записать систему
алгебраических уравнений для всех звеньев и методом последовательно
исключения промежуточных переменных получить эквивалентную
передаточную функцию по заданному каналу.
38.
Временные и частотные характеристикидинамических объектов и систем.
Временные характеристики.
Понятие детерминированных и стационарных систем.
(динамическое звено)
Система называется детерминированной, если каждому входному
сигналу X(t) отвечает один, единственный сигнал Y(t). В недетерминированных
системах входному сигналу соответствует несколько возможных выходных
сигналов, каждый из которых имеет определенную вероятность появления.
Система называется стационарной, если взаимосвязь между входом
и выходом не зависит от времени. В стационарной системе величина и вид
выходного сигнала не зависит от входного сигнала.
Временные характеристики в ТАУ применяют с целью изучения поведения
автоматических систем во временной области, когда о свойствах системы можно
судить на любом этапе управления по ее реакции на входное воздействие.
В качестве входных воздействий могут выступать как известные, так и
случайные функции, в ТАУ используются так называемые специальные функции.
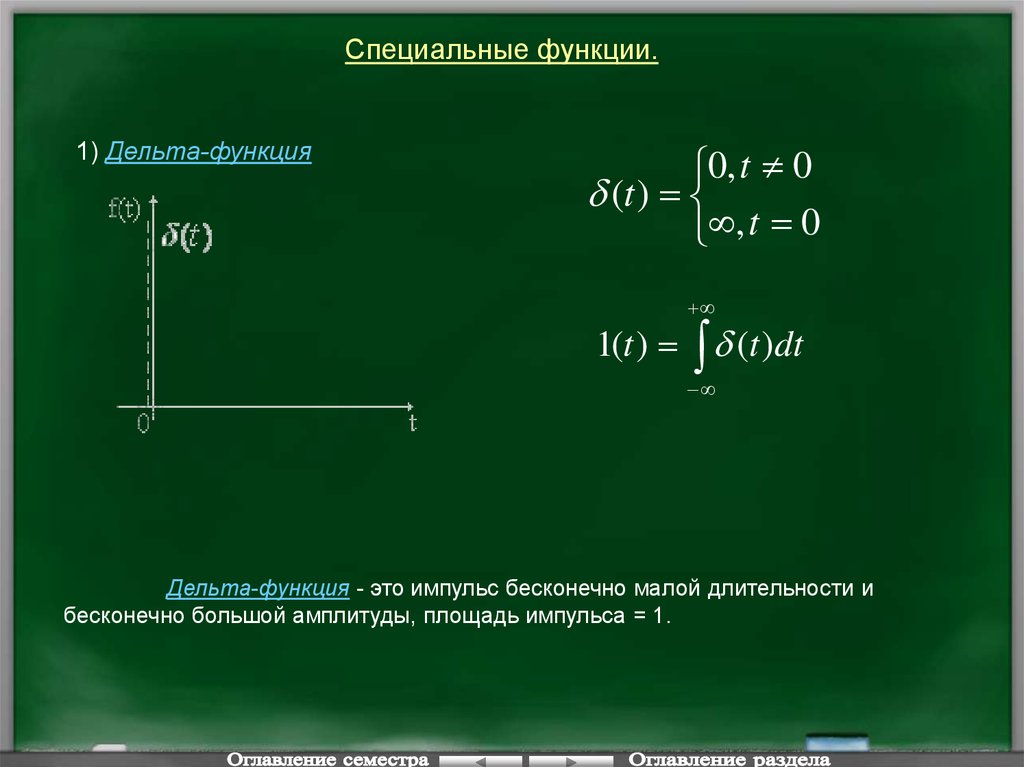
39.
Специальные функции.1) Дельта-функция
0, t 0
(t )
, t 0
1(t ) (t )dt
Дельта-функция - это импульс бесконечно малой длительности и
бесконечно большой амплитуды, площадь импульса = 1.
40.
2) Единичное, ступенчатое воздействие (функция Хевисайда)0, t 0
1(t )
1, t 0
0, t a
1(t a)
1, t a
Самая распространенная функция в ТАУ.
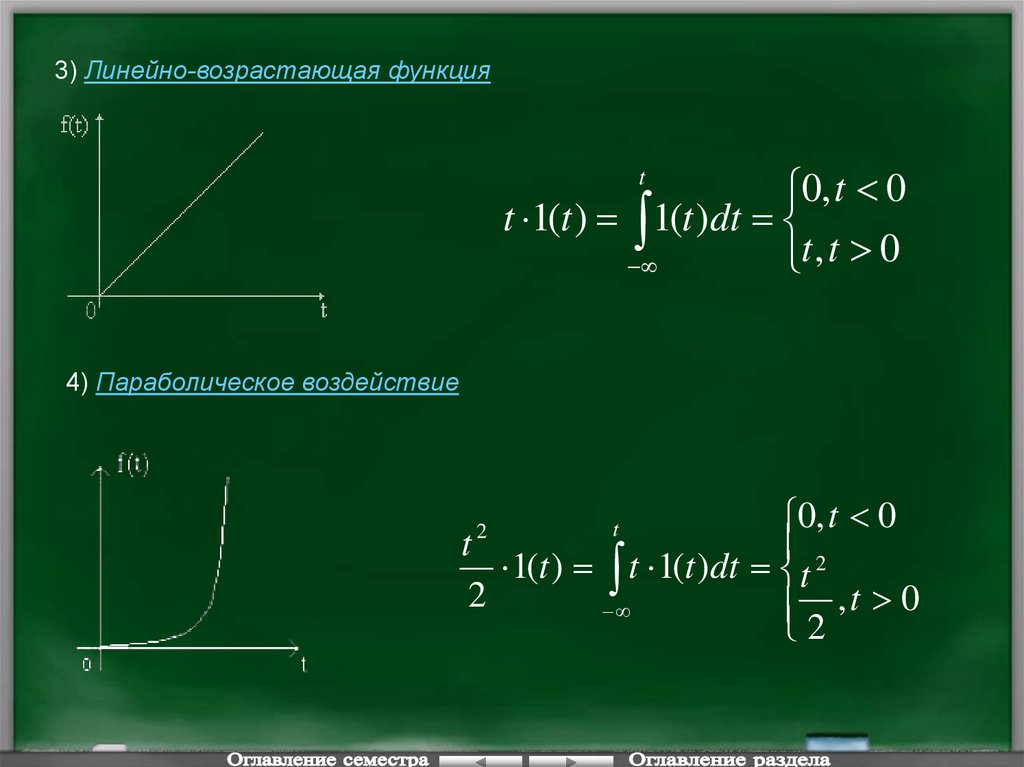
41.
3) Линейно-возрастающая функция0, t 0
t 1(t ) 1(t )dt
t , t 0
t
4) Параболическое воздействие
0, t 0
t
2
1(t ) t 1(t )dt t
2
,t 0
2
2
t
42.
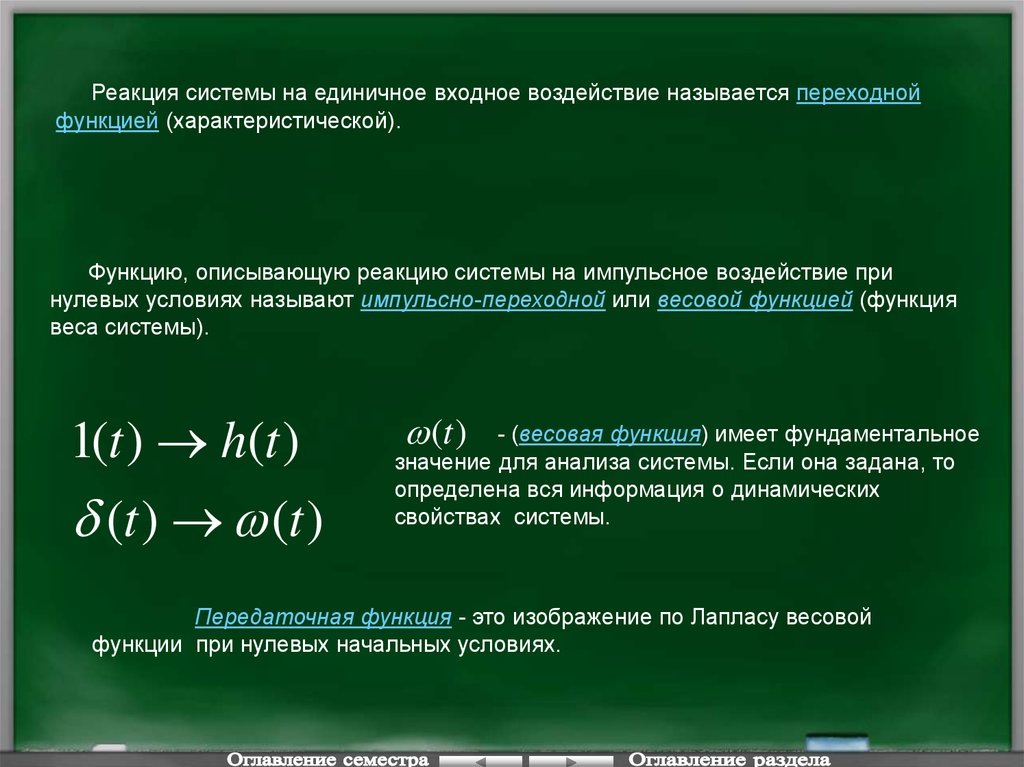
Реакция системы на единичное входное воздействие называется переходнойфункцией (характеристической).
Функцию, описывающую реакцию системы на импульсное воздействие при
нулевых условиях называют импульсно-переходной или весовой функцией (функция
веса системы).
1(t ) h(t )
(t ) (t )
(t )
- (весовая функция) имеет фундаментальное
значение для анализа системы. Если она задана, то
определена вся информация о динамических
свойствах системы.
Передаточная функция - это изображение по Лапласу весовой
функции при нулевых начальных условиях.
43.
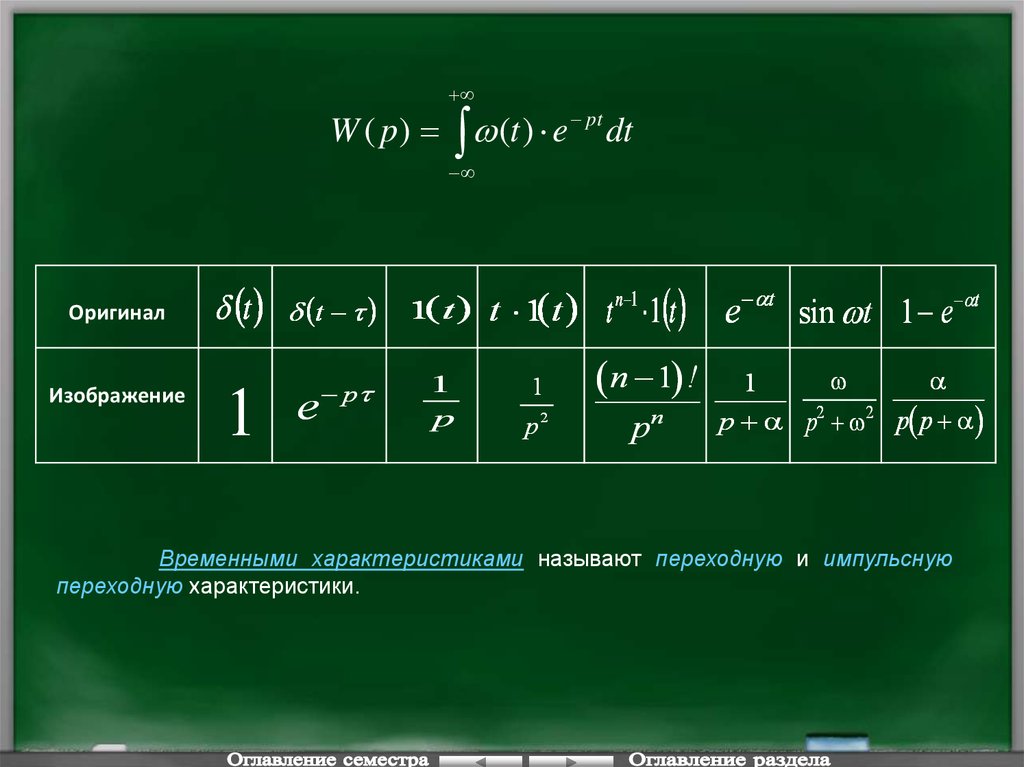
W ( p) (t ) e pt dtОригинал
Изображение
t
1
t
e
p
1 t
1
p
t 1 t t n 1 1 t
1
n 1 !
p2
pn
e t sin t 1 e t
1
p p2 2 p p
Временными характеристиками называют переходную и импульсную
переходную характеристики.
44.
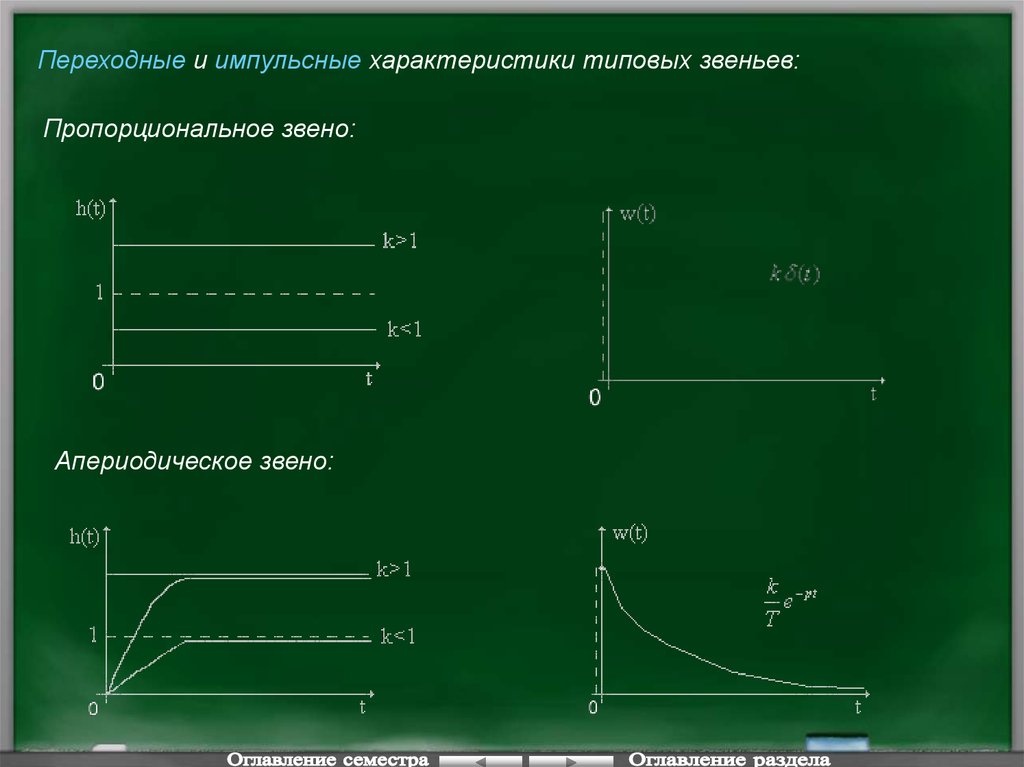
Переходные и импульсные характеристики типовых звеньев:Пропорциональное звено:
Апериодическое звено:
45.
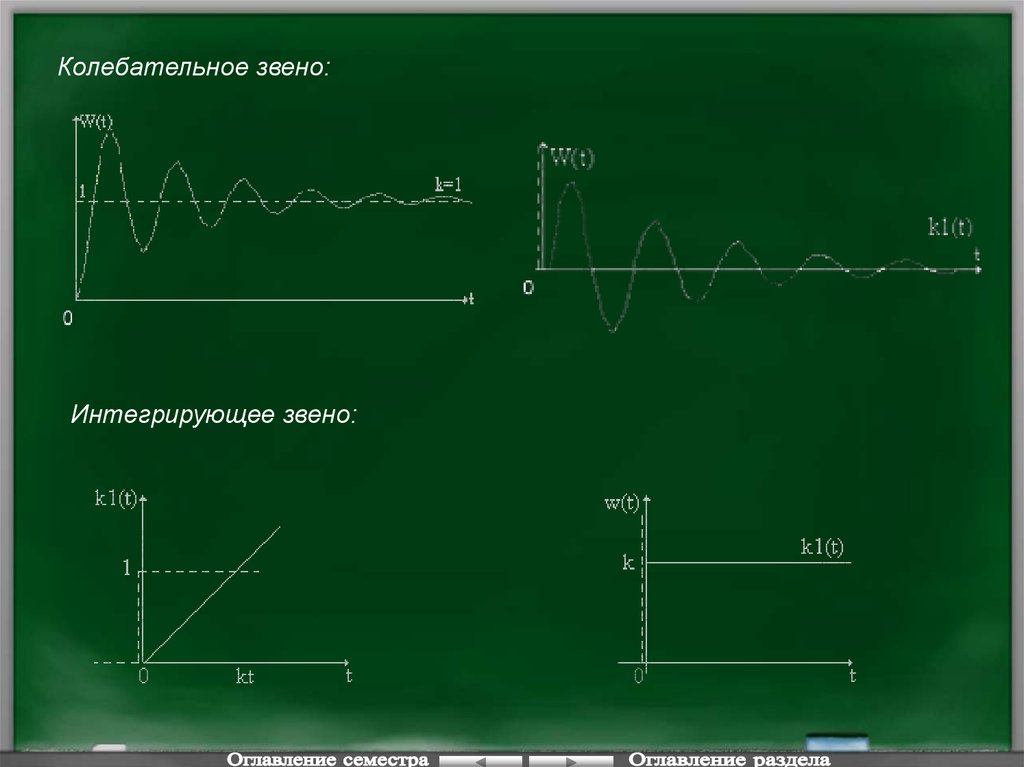
Колебательное звено:Интегрирующее звено:
46.
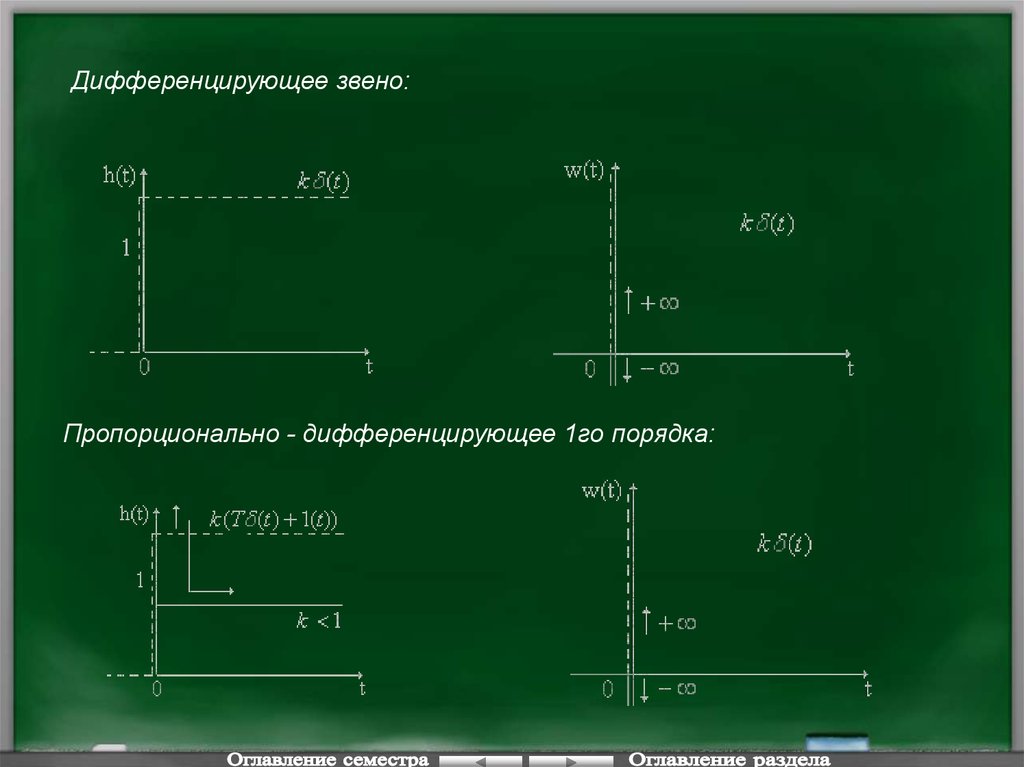
Дифференцирующее звено:Пропорционально - дифференцирующее 1го порядка:
47.
Частотные характеристики линейных динамическихзвеньев и систем.
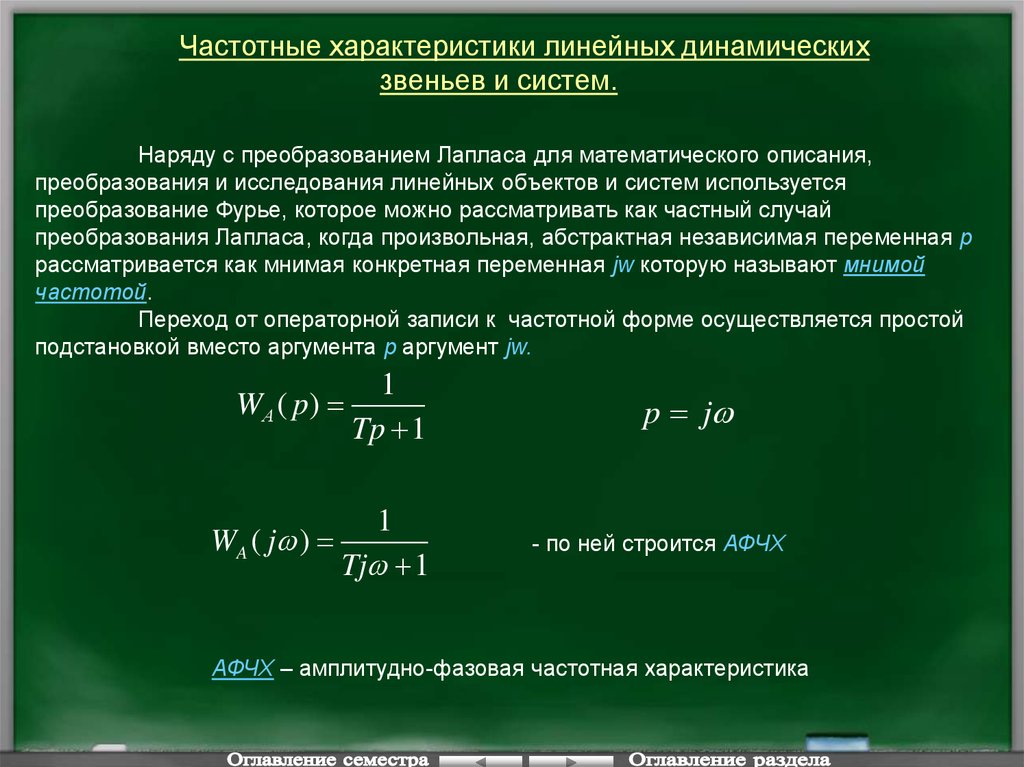
Наряду с преобразованием Лапласа для математического описания,
преобразования и исследования линейных объектов и систем используется
преобразование Фурье, которое можно рассматривать как частный случай
преобразования Лапласа, когда произвольная, абстрактная независимая переменная p
рассматривается как мнимая конкретная переменная jw которую называют мнимой
частотой.
Переход от операторной записи к частотной форме осуществляется простой
подстановкой вместо аргумента p аргумент jw.
WА ( p )
W A ( j )
1
Tp 1
1
Tj 1
p j
- по ней строится АФЧХ
АФЧХ – амплитудно-фазовая частотная характеристика
48.
1 Tj1 Tj
2
2
Tj 1
(1 Tj ) (1 Tj )
1 T
1
T
j
ВЧХ - вещественная частотная
1 T 2 2
1 T 2 2
характеристика
1
WA
ВЧХ
МЧХ
МЧХ - мнимая частотная
характеристика
АЧХ - амплитудно - частотная
характеристика
ФЧХ - фазо - частотная
характеристика
ВЧХ – Re(w), МЧХ – Im(w)
W ( j ) Re( ) j Im( ) A( )e j ( )
A( ) Re ( ) Im ( )
2
A( ) W ( j )
1
Re A ( )
1 T 2 2
2
- АЧХ
Im( )
( ) arctg
Re( )
( ) arg W ( j )
T
Im A ( )
1 T 2 2
- ФЧХ
49.
Для построения частотных характеристик используется диапазон частот от 0 до.
50.
1T
1
2
2
AA ( ) (
) (
)
2 2
2 2
1 T
1 T
1 T 2 2
T
2 2
A ( ) arctg
(
1
T
) arctgT
2 2
1 T
51.
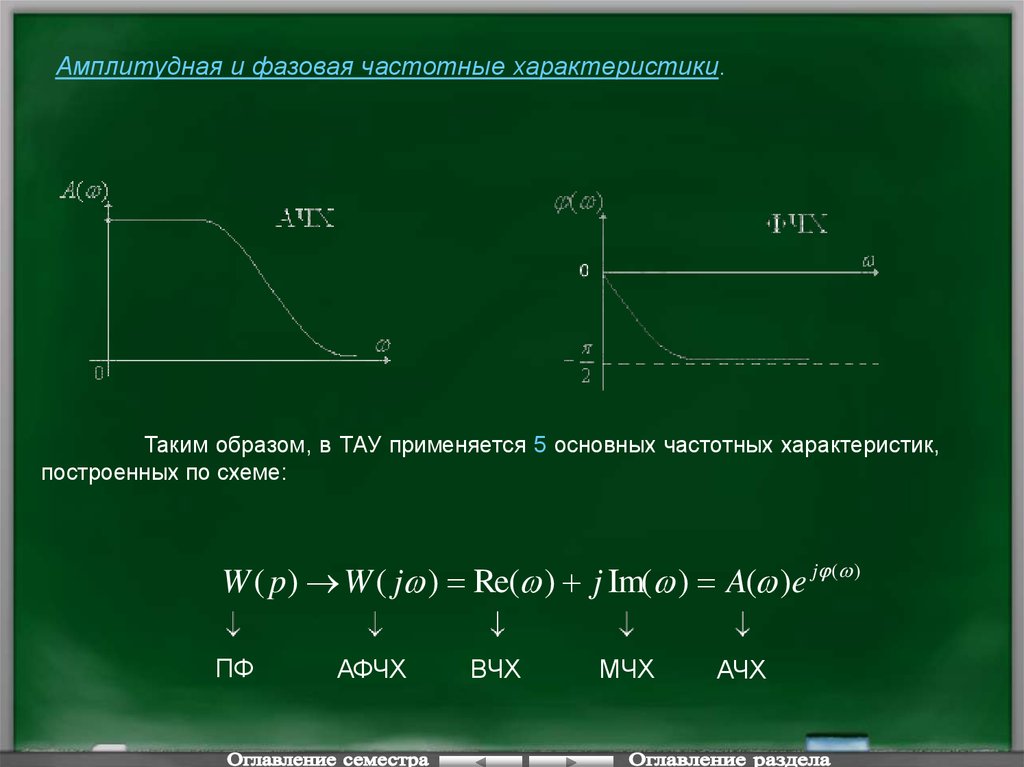
Амплитудная и фазовая частотные характеристики.Таким образом, в ТАУ применяется 5 основных частотных характеристик,
построенных по схеме:
W ( p) W ( j ) Re( ) j Im( ) A( )e j ( )
ПФ
АФЧХ
ВЧХ
МЧХ
АЧХ
52.
Физический смысл характеристик:x(t ) Aвх cos( t )
Aвх j t j t
(e e )
2
Aвх j t
Aвых j ( t )
e ;
Y (t )
e
2
2
Aвых
Y (t ) Aвых j
e
A( i )
;
X (t ) Авх
Авх
x(t )
( i )
A( )
W ( j ) W ( p) ДУ
( )
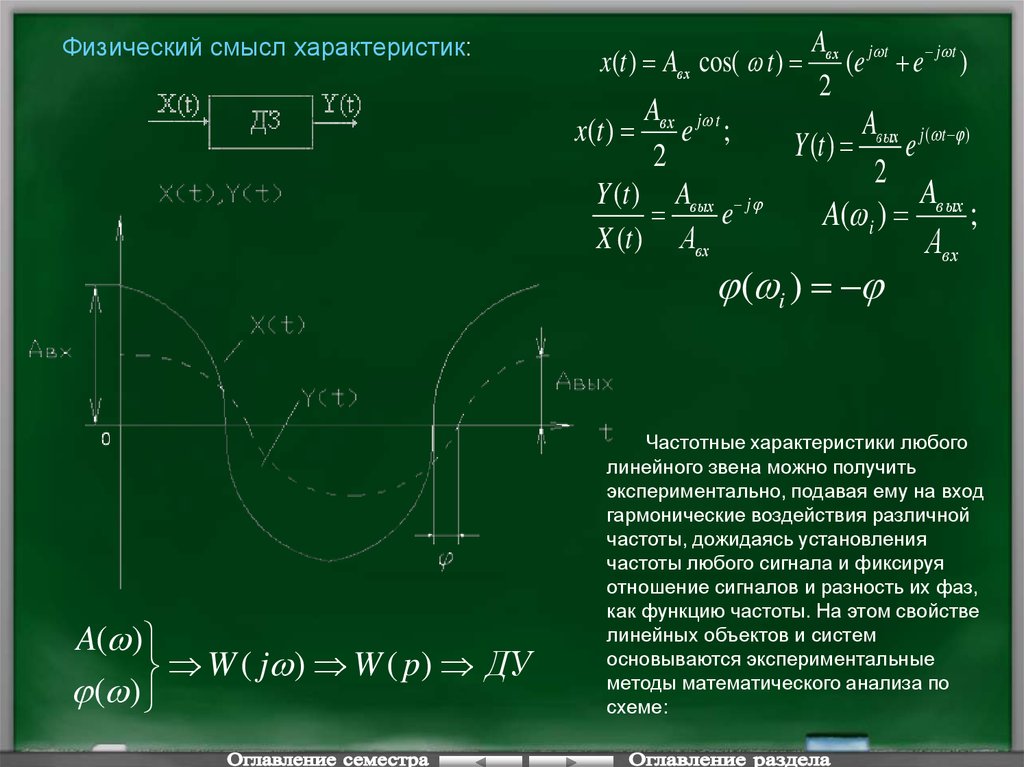
Частотные характеристики любого
линейного звена можно получить
экспериментально, подавая ему на вход
гармонические воздействия различной
частоты, дожидаясь установления
частоты любого сигнала и фиксируя
отношение сигналов и разность их фаз,
как функцию частоты. На этом свойстве
линейных объектов и систем
основываются экспериментальные
методы математического анализа по
схеме:
53.
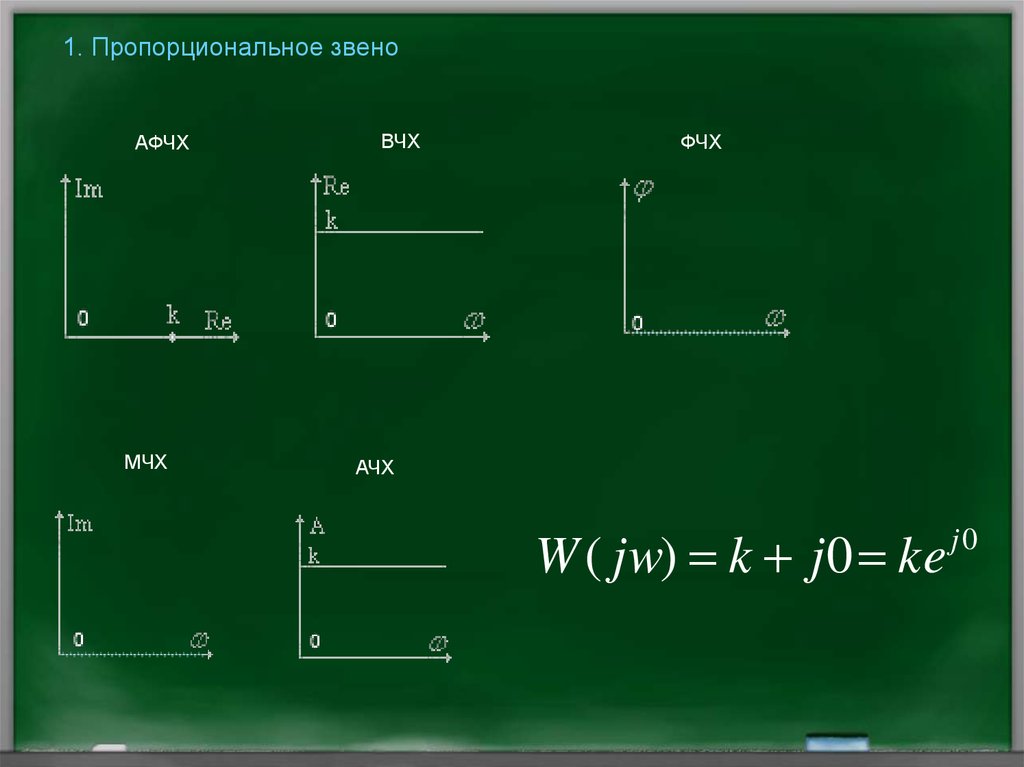
1. Пропорциональное звеноАФЧХ
МЧХ
ВЧХ
ФЧХ
АЧХ
W ( jw) k j 0 ke
j0
54.
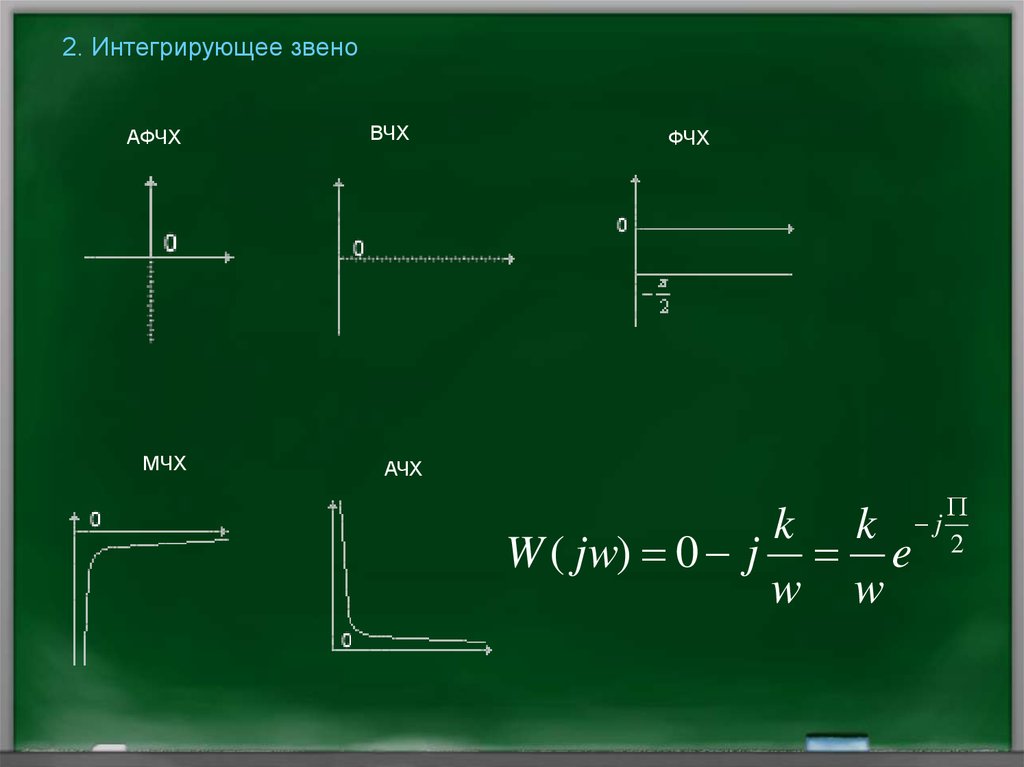
2. Интегрирующее звеноАФЧХ
МЧХ
ВЧХ
ФЧХ
АЧХ
k k
W ( jw) 0 j e
w w
j
2
55.
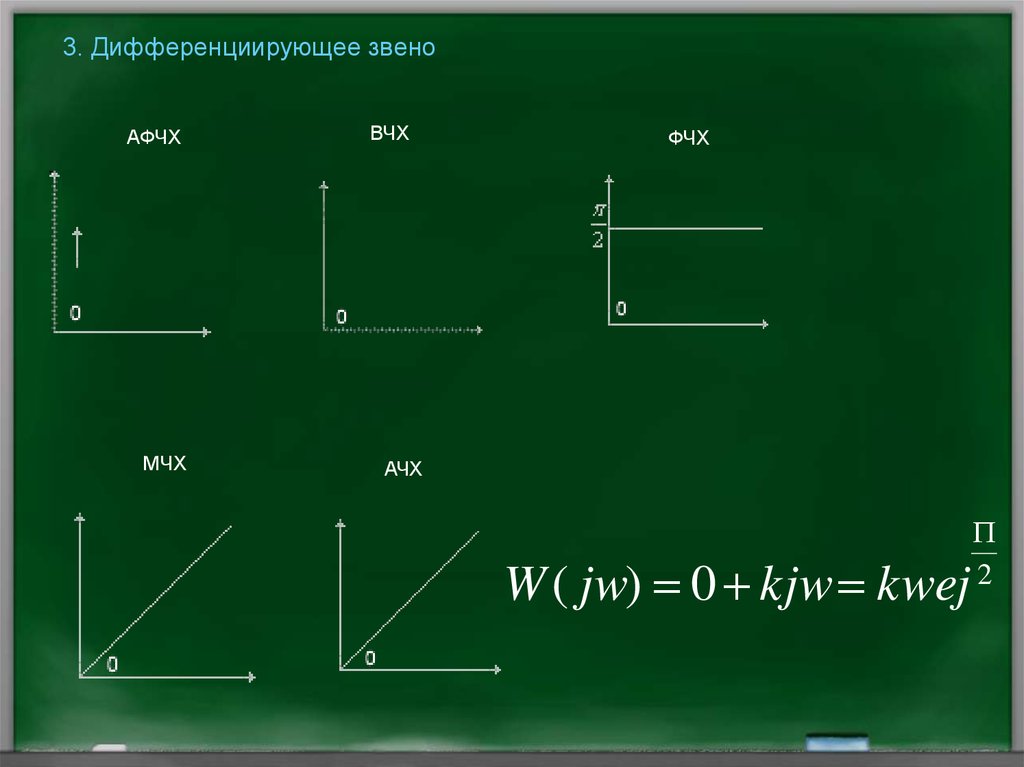
3. Дифференциирующее звеноАФЧХ
МЧХ
ВЧХ
ФЧХ
АЧХ
W ( jw) 0 kjw kwej
2
56.
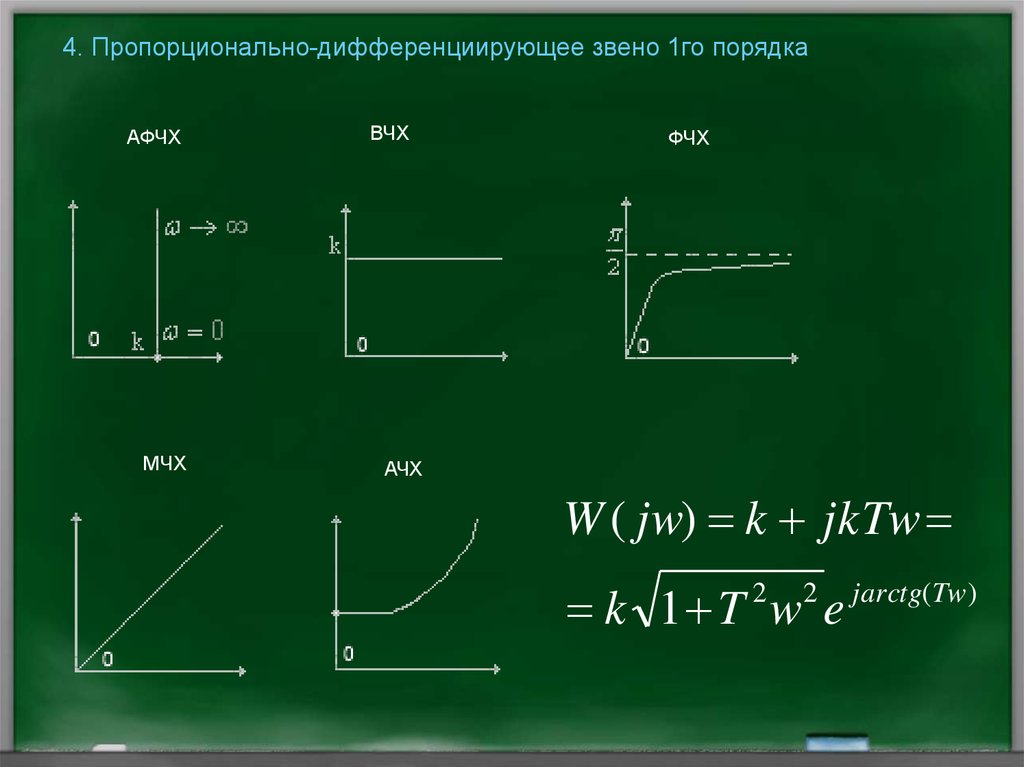
4. Пропорционально-дифференциирующее звено 1го порядкаАФЧХ
МЧХ
ВЧХ
ФЧХ
АЧХ
W ( jw) k jkTw
k 1 T w e
2
2
jarctg(Tw )
57.
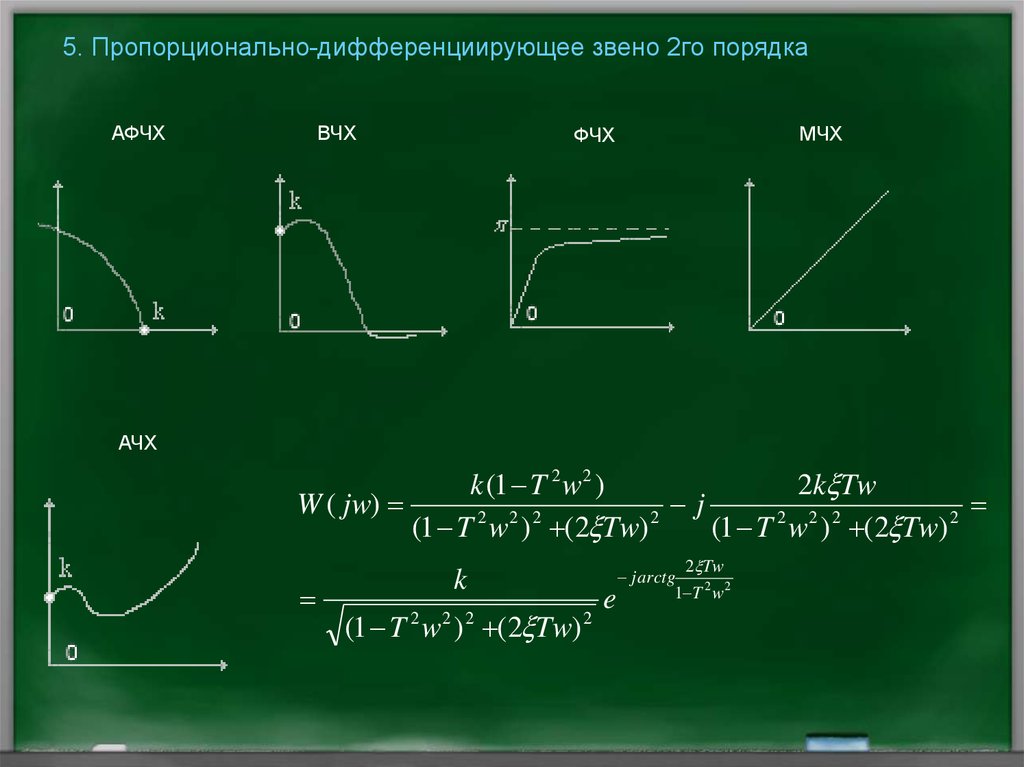
5. Пропорционально-дифференциирующее звено 2го порядкаАФЧХ
ВЧХ
МЧХ
ФЧХ
АЧХ
k (1 T 2 w2 )
2k Tw
W ( jw)
j
2 2 2
2
2 2 2
2
(1 T w ) (2 Tw)
(1 T w ) (2 Tw)
k
(1 T w ) (2 Tw)
2
2 2
2
e
2 Tw
jarctg
1 T 2 w 2
58.
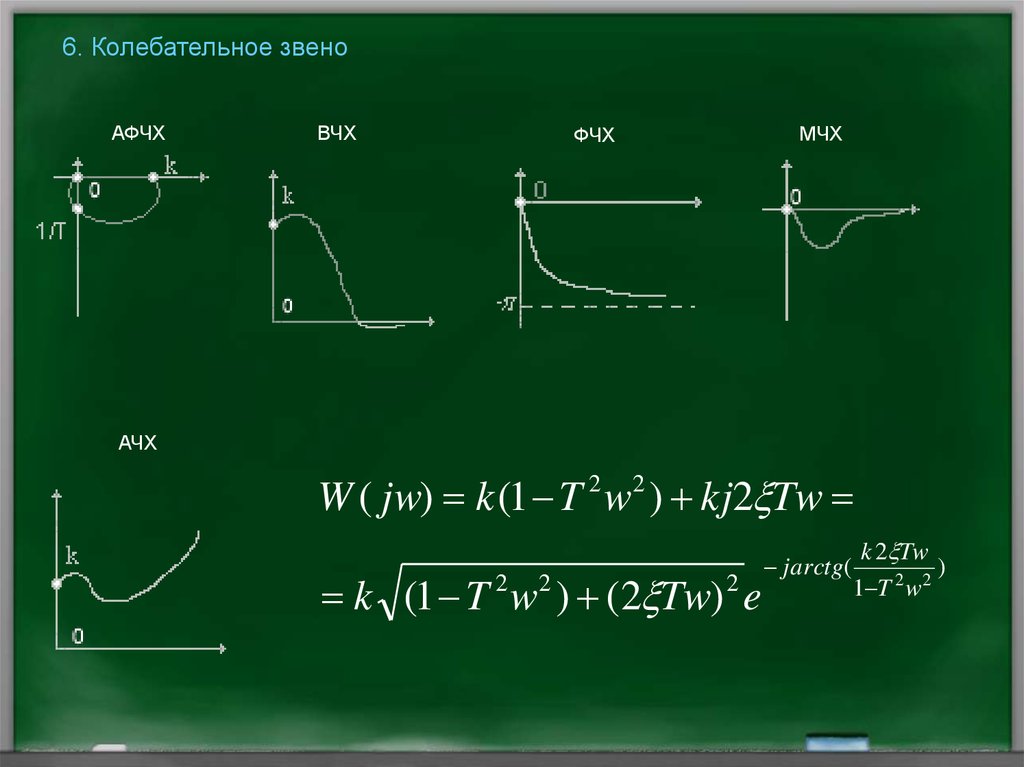
6. Колебательное звеноАФЧХ
ВЧХ
МЧХ
ФЧХ
АЧХ
W ( jw) k (1 T 2 w2 ) kj2 Tw
k (1 T w ) (2 Tw) e
2
2
2
jarctg(
k 2 Tw
1 T w
2
2
)
59.
ПЗИЗ
ДЗ
ПД1
ПД2
АФЧХ
ВЧХ
Частотные характеристики типовых звеньев
МЧХ
АЧХ
ФЧХ
КЗ
60.
Логарифмические частотные характеристикидинамических объектов и систем.
В ТАУ применяется две логарифмические частотные характеристики: ЛАЧХ и ЛФЧХ.
ЛАЧХ – график зависимости логарифма амплитуды от логарифма частоты.
L( ) 20 lg W ( j ) 20 lg A( )
Логарифм измеряется в децибелах по оси ординат и в декадах по оси абсцисс.
Декадой называется интервал, на котором частота изменяется в 10 раз.
61.
ЛФЧХ – график зависимости фазы от логарифма частоты.A( )
1
1 T 2 2
arctg (T )
L( ) 0
lim
C
0
1
T
(сопрягающая частота)
L( ) 20 lg T
lim
L( ) 10 lg( 2) 3дб
L( ) 20 lg(
1
1 T 2 2
) 20 lg( 1) 20 lg( 1 T 2 2 ) 10 lg( 1 T 2 2 )
62.
nA( ) Ai ( )
i 1
n
n
W ( p) Wi ( p) Ai ( )e
i 1
n
n
i 1
i 1
n
j i ( )
i 1
i 1
20 lg( Ai ( )) L( ) (20 lg Ai ( ))
По сопрягающей частоте можно построить ЛЧХ. Реальную ЛАЧХ можно
заменить асимптотической, для удобства построения. ЛЧХ сохраняет свою форму при
изменении Т, но если изменяется wc то графики меняют свое расположение
относительно оси частот lg(w)
Все звенья первого порядка имеют наклон в 20 дб/дк в зависимости от того,
где стоит полином: в числителе или знаменателе, наклон + или – соответственно. Все
звенья второго порядка имеют наклон в 40 дб/дк т.е. в 2 раза больше, наклон
определяется также.
63.
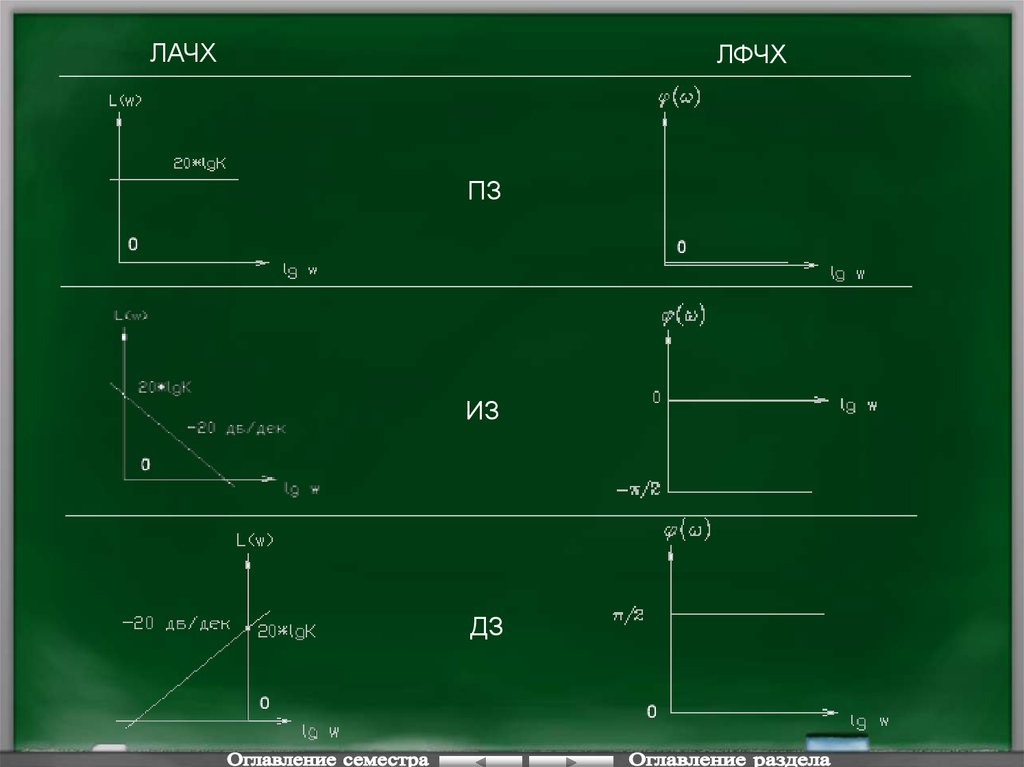
ЛАЧХЛФЧХ
ПЗ
ИЗ
ДЗ
64.
ЛАЧХЛФЧХ
ПД1
КЗ
ПД2
65.
Построение логарифмических частотных характеристик (ЛЧХ)сложных динамических звеньев.
Исходными данными для построения этих характеристик является передаточная
функция объекта или системы, преобразуемая к канонической последовательноструктурированной форме записи.
WK
ПС
m
( p) kp Wi ( p)
i 1
Построение ЛФЧХ сложного динамического звена.
Сначала строится ЛФЧХ элементарных динамических звеньев, входящих в
сложное по отдельности. После этого они суммируются и формируют ЛФЧХ сложного
звена.
Построение ЛАЧХ сложного динамического звена.
При этом процедура графического сложения необязательна и неэффективна
с временной точки зрения, т.к. возможно последовательное построение графика
асимптотической характеристики путем поворота асимптот в сопрягающих частотах при
движении по оси частот слева направо.
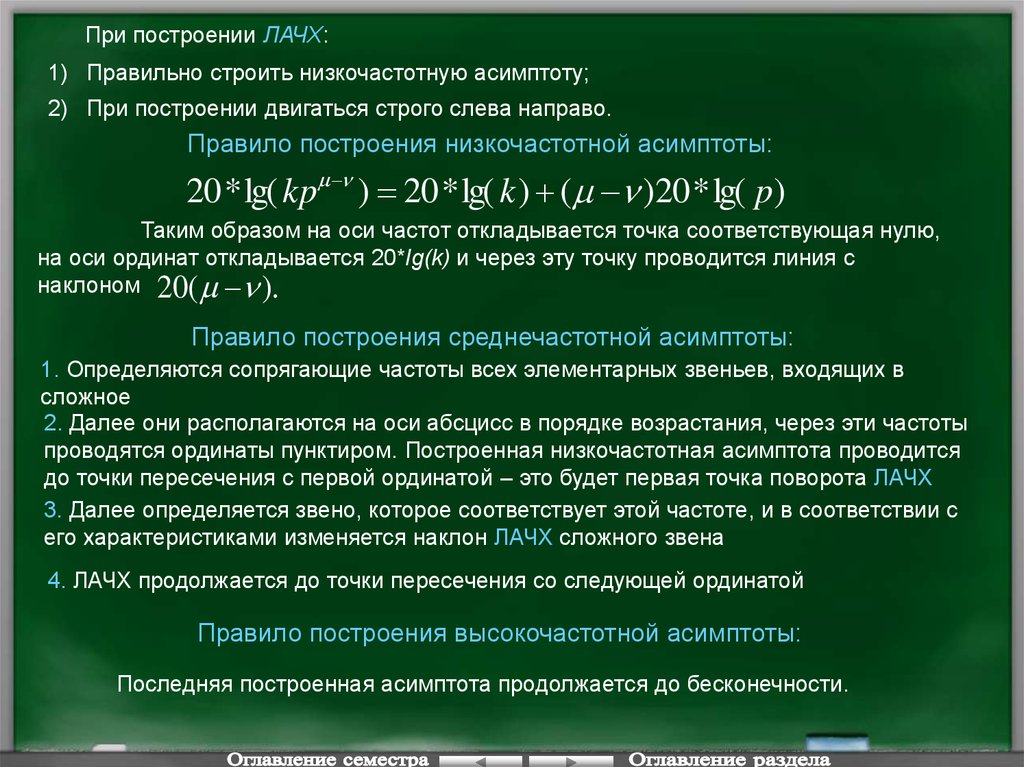
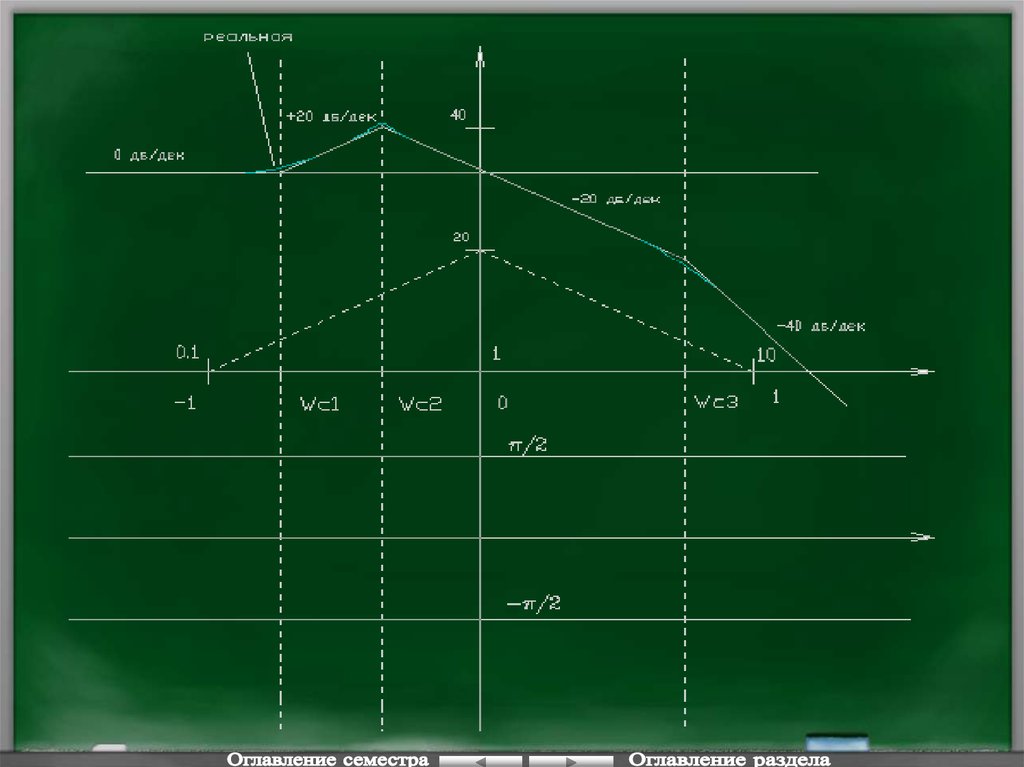
66.
При построении ЛАЧХ:1) Правильно строить низкочастотную асимптоту;
2) При построении двигаться строго слева направо.
Правило построения низкочастотной асимптоты:
20 * lg( kp ) 20 * lg( k ) ( )20 * lg( p)
Таким образом на оси частот откладывается точка соответствующая нулю,
на оси ординат откладывается 20*lg(k) и через эту точку проводится линия с
наклоном 20( ).
Правило построения среднечастотной асимптоты:
1. Определяются сопрягающие частоты всех элементарных звеньев, входящих в
сложное
2. Далее они располагаются на оси абсцисс в порядке возрастания, через эти частоты
проводятся ординаты пунктиром. Построенная низкочастотная асимптота проводится
до точки пересечения с первой ординатой – это будет первая точка поворота ЛАЧХ
3. Далее определяется звено, которое соответствует этой частоте, и в соответствии с
его характеристиками изменяется наклон ЛАЧХ сложного звена
4. ЛАЧХ продолжается до точки пересечения со следующей ординатой
Правило построения высокочастотной асимптоты:
Последняя построенная асимптота продолжается до бесконечности.
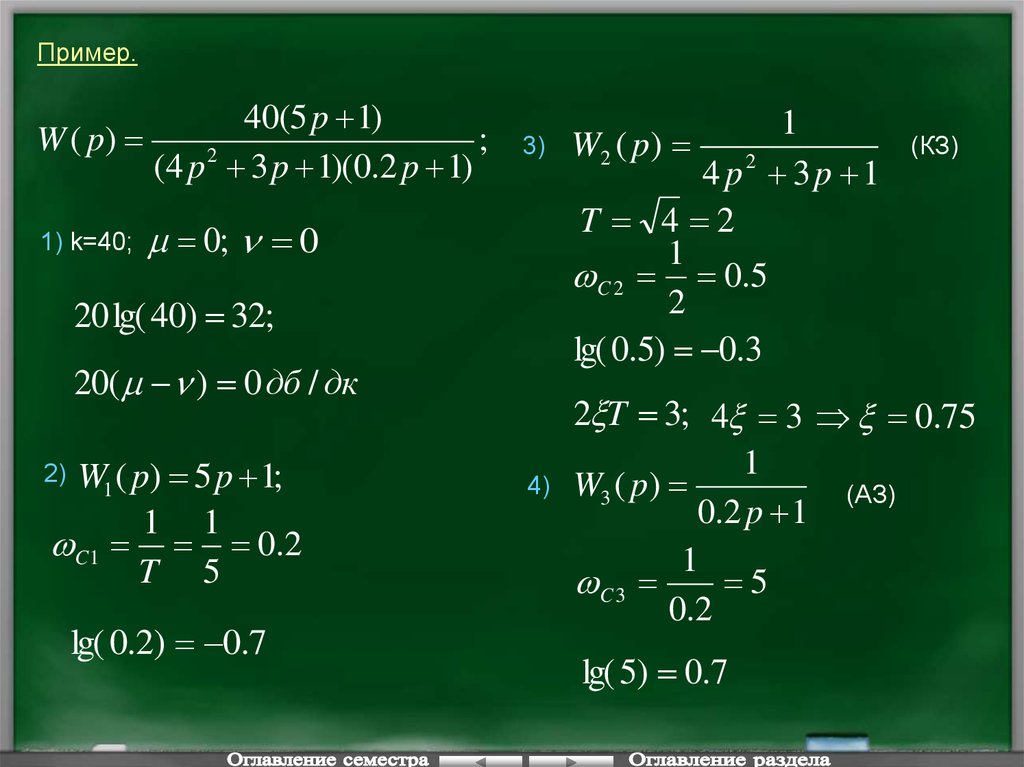
67.
Пример.40(5 p 1)
W ( p)
;
2
(4 p 3 p 1)(0.2 p 1)
1) k=40;
3)
0; 0
20 lg( 40) 32;
20( ) 0 дб / дк
W1 ( p) 5 p 1;
1 1
C1 0.2
T 5
2)
lg( 0.2) 0.7
4)
1
W2 ( p )
4 p2 3p 1
T 4 2
1
C 2 0.5
2
lg( 0.5) 0.3
(КЗ)
2 T 3; 4 3 0.75
1
W3 ( p)
(АЗ)
0.2 p 1
1
C 3
5
0.2
lg( 5) 0.7
68.
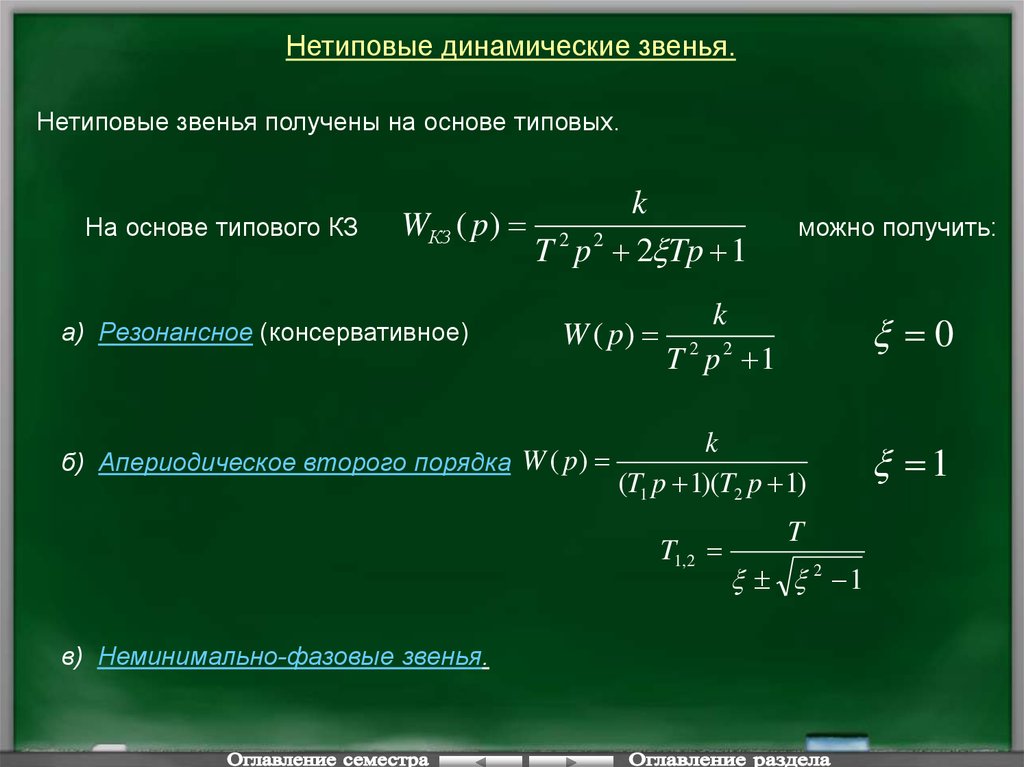
69.
Нетиповые динамические звенья.Нетиповые звенья получены на основе типовых.
На основе типового КЗ
k
WКЗ ( p) 2 2
T p 2 Tp 1
а) Резонансное (консервативное)
W ( p)
б) Апериодическое второго порядка W ( p)
k
T 2 p2 1
0
k
(T1 p 1)(T2 p 1)
T1, 2
в) Неминимально-фазовые звенья.
можно получить:
T
2 1
1
70.
Неминимально-фазовое звено – звено, в котором хотя бы один нуль илиполюс его передаточной функции имеет положительную вещественную
часть (все типовые звенья называются минимально-фазовыми).
WA ( p )
k
Tp 1
k
W ( p)
Tp 1
В минимально-фазовых звеньях, т.е. типовых, есть однозначная связь
между АЧХ и ФЧХ, т.е. для полной идентификации 4 характеристик
достаточно знать только одну из них.
В неминимально-фазовых
звеньях необходимо строить обе
характеристики.
Пример:
W ( j )
k
Tj 1
k
1 T 2 2
e j ( arctg(T ))
71.
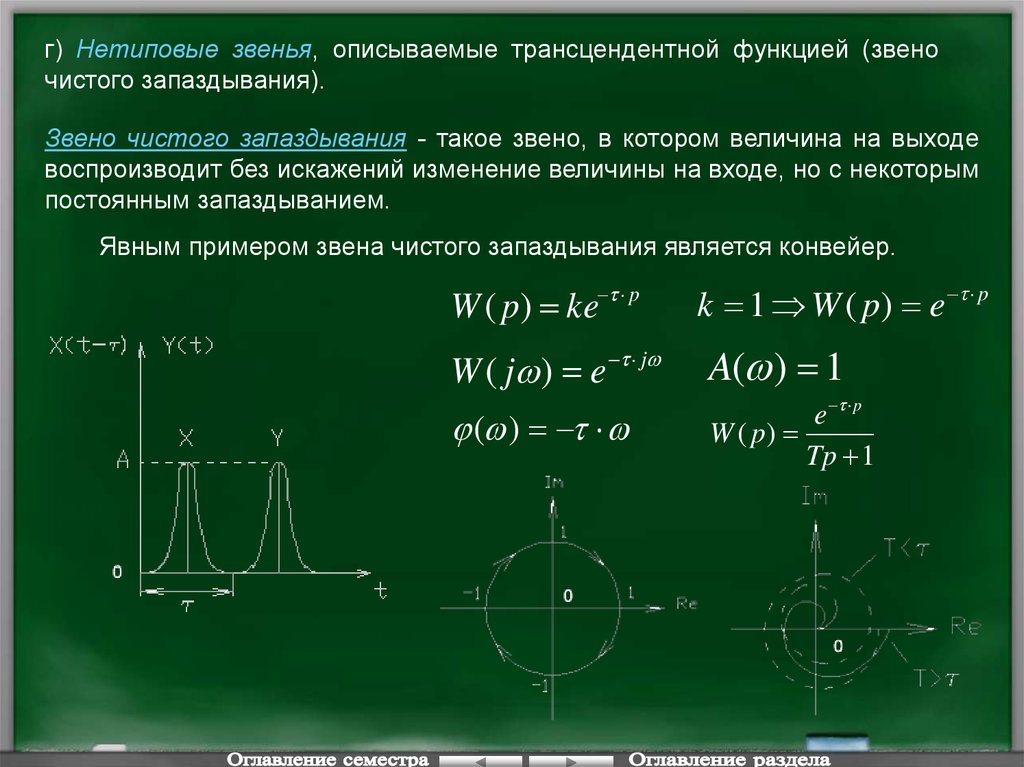
г) Нетиповые звенья, описываемые трансцендентной функцией (звеночистого запаздывания).
Звено чистого запаздывания - такое звено, в котором величина на выходе
воспроизводит без искажений изменение величины на входе, но с некоторым
постоянным запаздыванием.
Явным примером звена чистого запаздывания является конвейер.
W ( p) ke p
k 1 W ( p) e p
W ( j ) e j
A( ) 1
( )
e p
W ( p)
Tp 1
72.
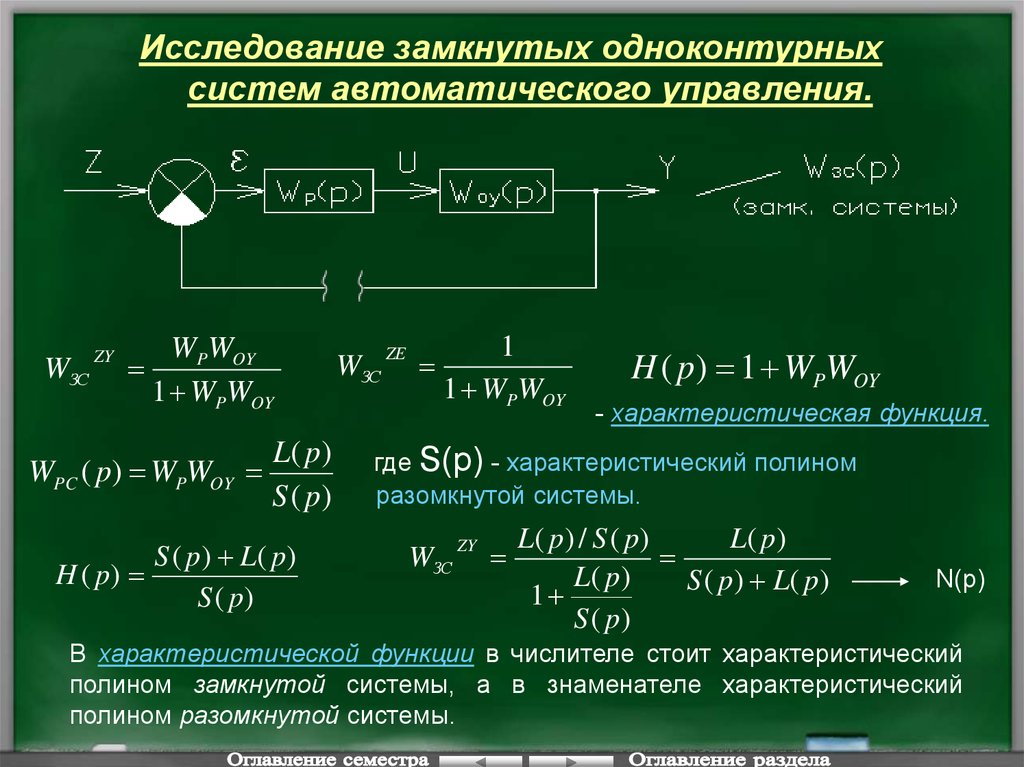
Исследование замкнутых одноконтурныхсистем автоматического управления.
WЗС
ZY
WPWOY
1 WPWOY
WPC ( p) WPWOY
L( p )
S ( p)
S ( p ) L( p )
H ( p)
S ( p)
WЗС
ZE
1
1 WPWOY
H ( p) 1 WPWOY
- характеристическая функция.
где S(p) - характеристический полином
разомкнутой системы.
WЗС
ZY
L( p ) / S ( p )
L( p )
L( p )
S ( p ) L( p )
1
S ( p)
N(p)
В характеристической функции в числителе стоит характеристический
полином замкнутой системы, а в знаменателе характеристический
полином разомкнутой системы.
73.
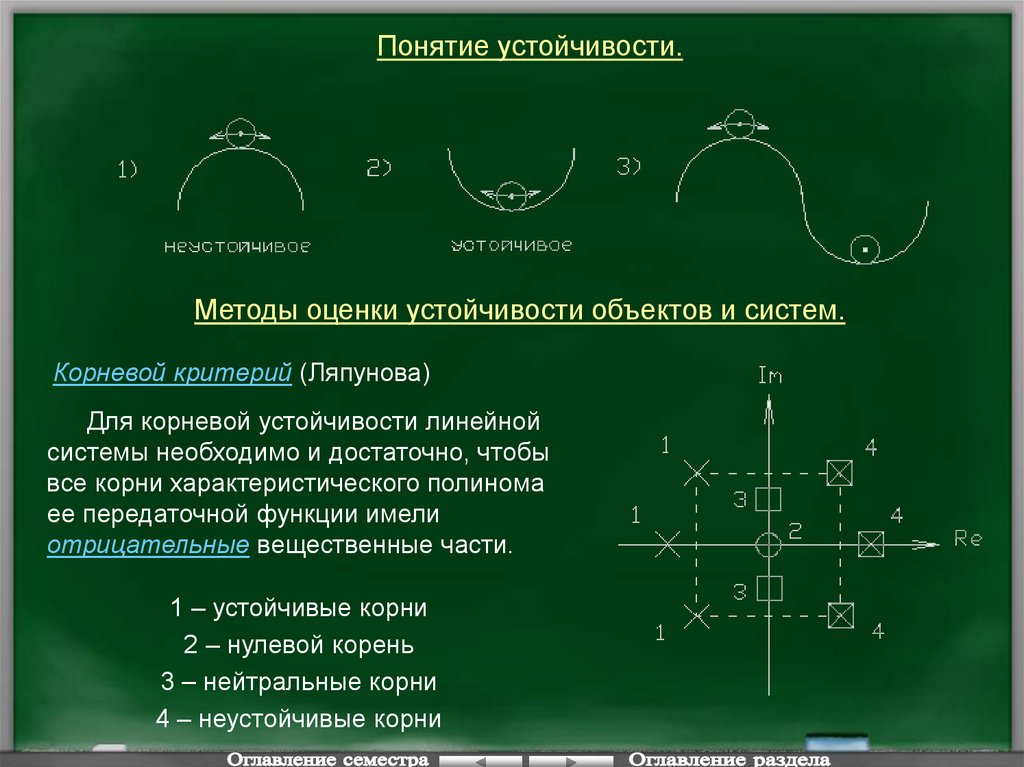
Понятие устойчивости.Методы оценки устойчивости объектов и систем.
Корневой критерий (Ляпунова)
Для корневой устойчивости линейной
системы необходимо и достаточно, чтобы
все корни характеристического полинома
ее передаточной функции имели
отрицательные вещественные части.
1 – устойчивые корни
2 – нулевой корень
3 – нейтральные корни
4 – неустойчивые корни
74.
Качественная оценка характеристического полинома.Необходимое условие устойчивости всех корней характеристического полинома:
1) Все коэффициенты характеристического полинома
должны быть одного знака;
2) Характеристический полином должен быть полным, т.е. содержать все
ненулевые коэффициенты, т.е. для каждого аi 0 i 0, n
Эти же условия для полинома второго порядка являются и
достаточными, а для полиномов более высокого порядка они только
необходимые.
Все методы оценки устойчивости делятся на 2 основных класса:
а) Алгебраические (с помощью алгебраических вычислений)
б) Частотные (используя частотные характеристики)
Алгебраические критерии: Рауса
Гурвица
Льенара-Шипара
75.
Алгебраические критерии:Критерий Рауса
В 1878 году английский математик Раус предложил критерий:
Исходными данными является характеристический полином
N ( p) a n p n a n 1 p n 1 ..... a1 p a0
По критерию Рауса исследуемая система устойчива, если все
коэффициенты в первом столбце таблицы Рауса имеют одинаковый знак, если
условие не соблюдается, то характеристический полином имеет неустойчивые
корни, количество которых равно числу перемен знака. В таблице всегда (n-1)
строк.
Критерий Гурвица
В 1895 году новый критерий изобрел немецкий математик Гурвиц.
Для оценки устойчивости также используется характеристический полином.
На его основе составлен главный определитель Гурвица
an 1 an 3
n
an
0
0
0
0
an 2 ... ...
an 1 ... 0
...
... a 0
Для проверки правильности составления
определителя, анализируется главная
диагональ, где должны стоять все
коэффициенты характеристического
полинома от а0 до аn-1
76.
Правило определения устойчивости: Если все диагональные минорыположительны и а0 тоже, то данный объект является устойчивым, если
главный минор равен 0, то либо а0=0 и есть один нулевой корень, либо другие
коэффициенты равны 0 и есть пара чисто мнимых корней.
Критерий Льенара-Шипара
Правило: Если все коэффициенты характеристического полинома
не равны нулю и все главные миноры матрицы Гурвица с четными
(нечетными) номерами тоже, то характеристический полином является
устойчивым.
77.
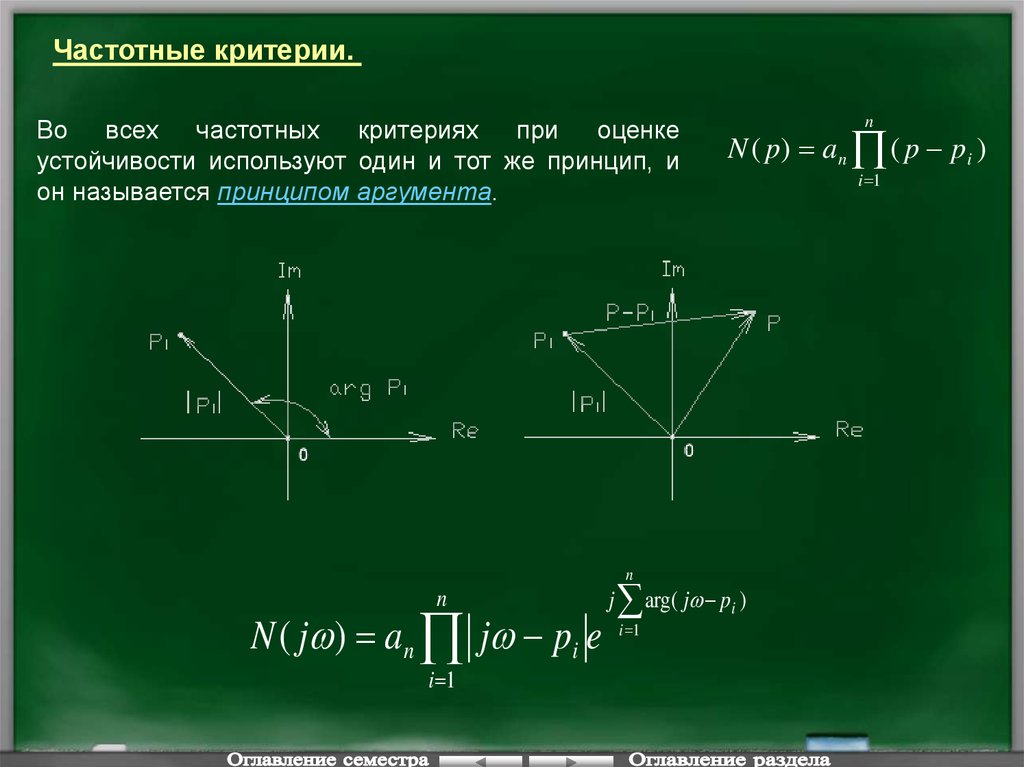
Частотные критерии.Во всех частотных критериях при оценке
устойчивости используют один и тот же принцип, и
он называется принципом аргумента.
n
n
N ( j ) a n j pi e
i 1
j
N ( p) a n ( p pi )
arg( j pi )
i 1
n
i 1
78.
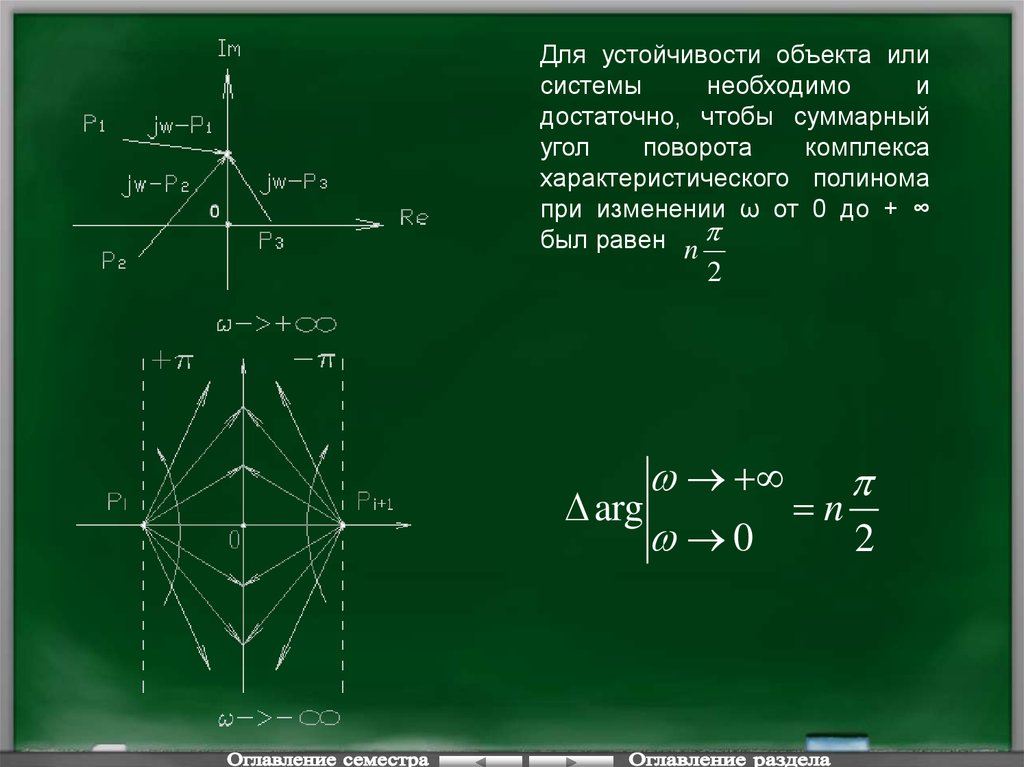
Для устойчивости объекта илисистемы
необходимо
и
достаточно, чтобы суммарный
угол
поворота
комплекса
характеристического полинома
при изменении ω от 0 до + ∞
был равен n
2
arg
n
0
2
79.
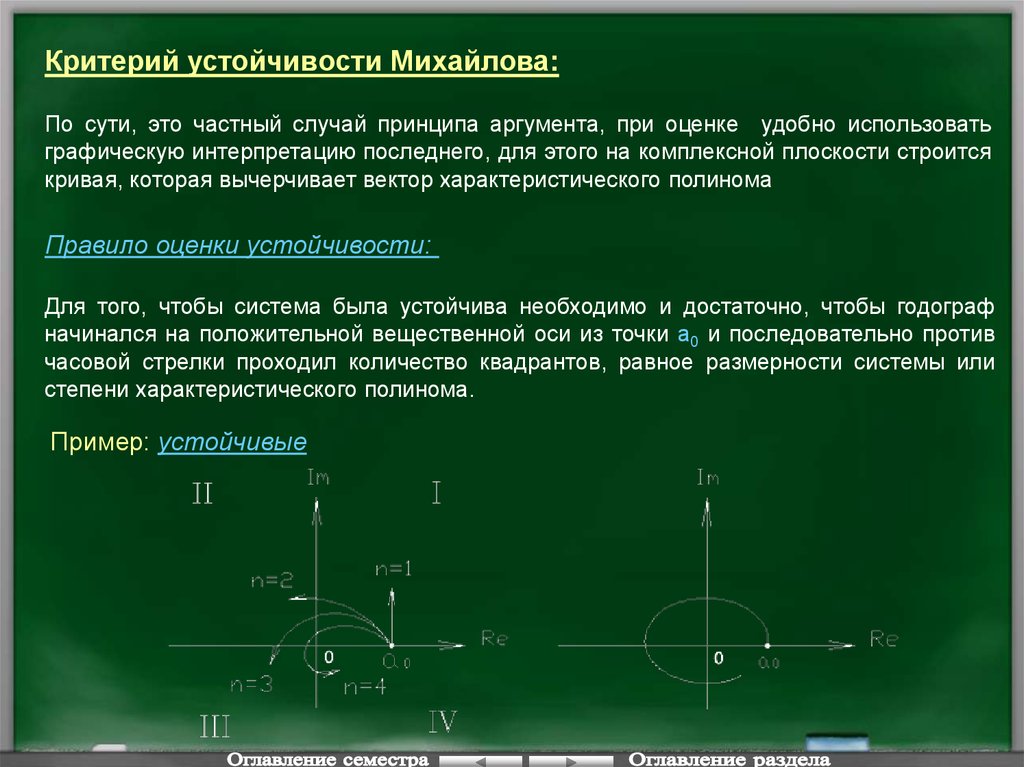
Критерий устойчивости Михайлова:По сути, это частный случай принципа аргумента, при оценке удобно использовать
графическую интерпретацию последнего, для этого на комплексной плоскости строится
кривая, которая вычерчивает вектор характеристического полинома
Правило оценки устойчивости:
Для того, чтобы система была устойчива необходимо и достаточно, чтобы годограф
начинался на положительной вещественной оси из точки а0 и последовательно против
часовой стрелки проходил количество квадрантов, равное размерности системы или
степени характеристического полинома.
Пример: устойчивые
80.
Пример: неустойчивыеПример: на границе устойчивости
81.
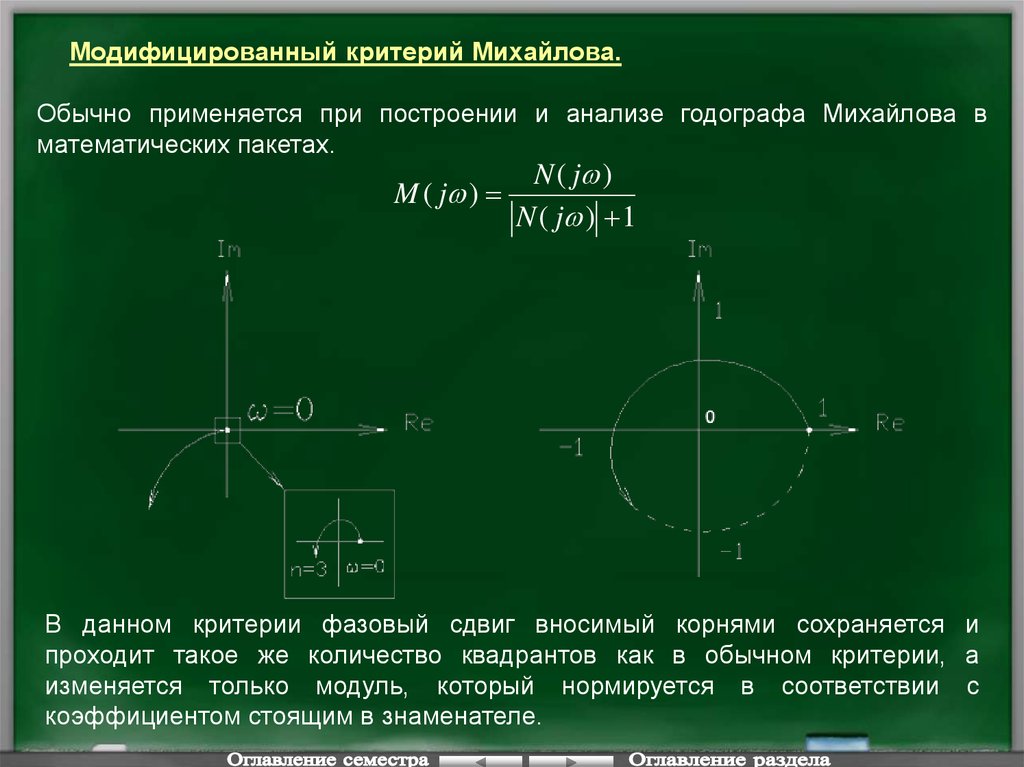
Модифицированный критерий Михайлова.Обычно применяется при построении и анализе годографа Михайлова в
математических пакетах.
M ( j )
N ( j )
N ( j ) 1
В данном критерии фазовый сдвиг вносимый корнями сохраняется и
проходит такое же количество квадрантов как в обычном критерии, а
изменяется только модуль, который нормируется в соответствии с
коэффициентом стоящим в знаменателе.
82.
Критерий Найквиста: Оценка устойчивости замкнутых систем поразомкнутым
Для оценки устойчивости используют АФЧХ разомкнутой системы.
L( p )
WPC ( p)
S ( p)
S ( p)
L( p ) S ( p )
H ( p) 1 WPC ( p)
S ( p)
- характеристический полином разомкнутой системы
nPC nЗС
L( p) S ( p) - характеристический полином замкнутой системы
83.
Годограф, изображающий характеристическую функцию, совпадает сгодографом АФЧХ разомкнутой системы, если начало вектора перенести в
точку (-1, j0)
Таким образом, если из условий устойчивости корней характеристического
полинома найти обязательным образом связанные свойства вектора,
изображающего характеристическую функцию, то можно по годографу АФЧХ
разомкнутой системы судить об устойчивости замкнутой системы.
Для оценки устойчивости можно использовать принцип аргумента, как в
критерии Михайлова.
84.
Аналитическая трактовка критерия Найквиста.N ( p) N ( j )
N n
2
N ( j ) AN ( j )e j N
H ( p) H ( j )
S ( j )
AS ( j )e j S
H N S
Пусть в разомкнутой системе в характеристическом полиноме есть r –
устойчивых, m – неустойчивых и q – нейтральных корней.
S r
2
m
2
q 0
H (r m q)
2
r
H n
2
m
2
2
m q
r
2
2
m
n r m q
2
H m q
2
85.
Для того, чтобы замкнутая система была устойчивой, необходимо идостаточно, чтобы вектор проведенной из точки (-1 , j0) к годографу АФЧХ
разомкнутой системы совершал суммарный поворот при изменении частоты
ω от 0 до +∞ на угол, равный сумме m полуоборотов и q четверть оборотов в
положительном направлении.
H m q
2
Графическая трактовка критерия Найквиста.
Частные случаи применения критерия:
1) Разомкнутая система является устойчивой
H 0
Для устойчивости замкнутой
системы необходимо и остаточно, чтобы
годограф АФЧХ не охватывал точку с
координатами (-1, j0). Для этого
применяется эмпирическое правило
правой штриховки: на годограф АФЧХ
наносится штриховка справа по мере
увеличения частоты, если точка (-1 , j0)
попадает в область штриховки, значит
годограф охватывает ее.
86.
2) Разомкнутая система обладает астатизмом первого порядка3) Разомкнутая система обладает
астатизмом произвольного
порядка (допустим третьего)
q 1
m 0
1 – устойчива
2 – неустойчива
H
2
q 3
m 0
3
H
2
87.
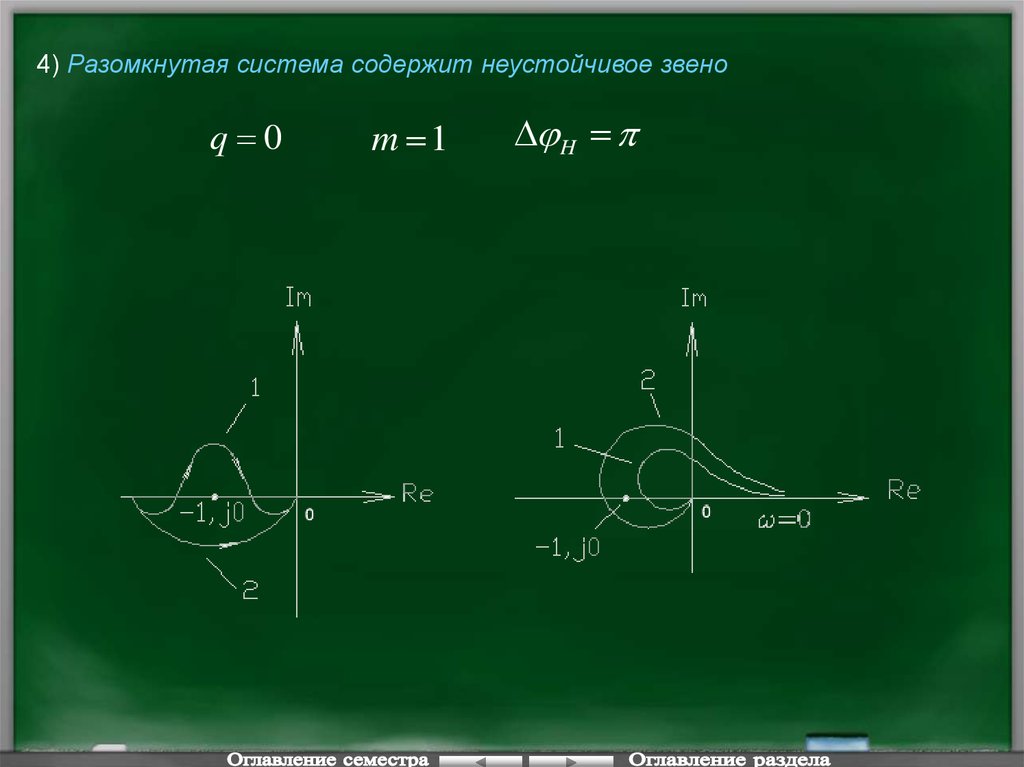
4) Разомкнутая система содержит неустойчивое звеноq 0
m 1
H
88.
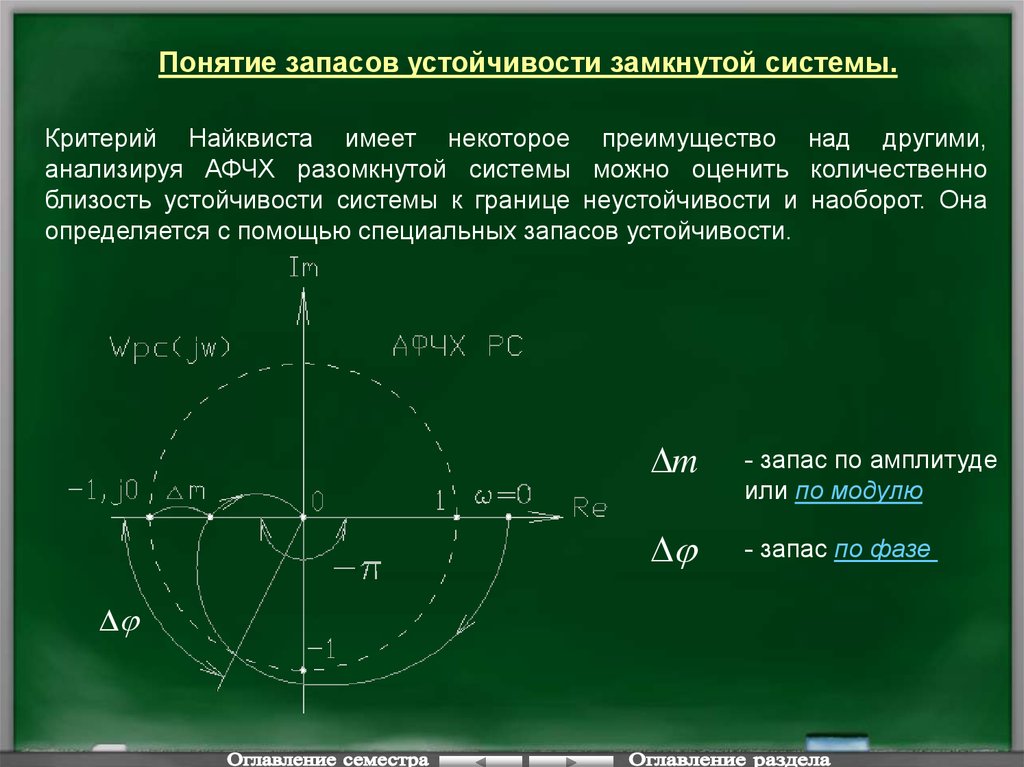
Понятие запасов устойчивости замкнутой системы.Критерий Найквиста имеет некоторое преимущество над другими,
анализируя АФЧХ разомкнутой системы можно оценить количественно
близость устойчивости системы к границе неустойчивости и наоборот. Она
определяется с помощью специальных запасов устойчивости.
m
- запас по амплитуде
или по модулю
- запас по фазе
89.
90.
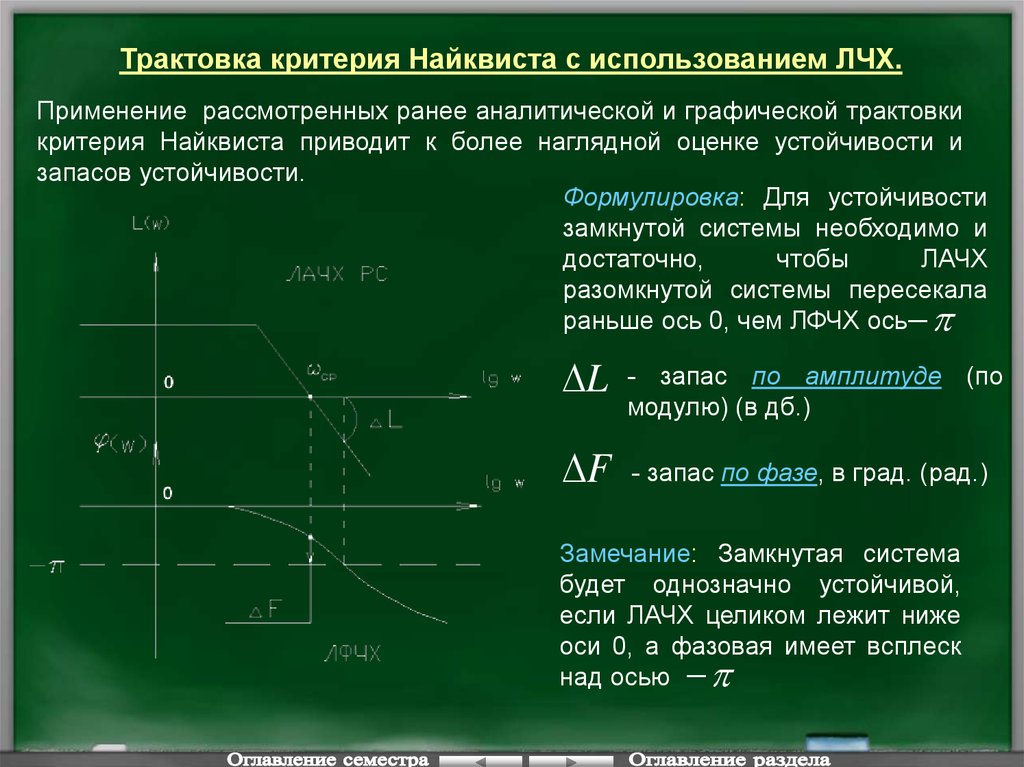
Трактовка критерия Найквиста с использованием ЛЧХ.Применение рассмотренных ранее аналитической и графической трактовки
критерия Найквиста приводит к более наглядной оценке устойчивости и
запасов устойчивости.
Формулировка: Для устойчивости
замкнутой системы необходимо и
достаточно,
чтобы
ЛАЧХ
разомкнутой системы пересекала
раньше ось 0, чем ЛФЧХ ось
L
F
- запас по амплитуде (по
модулю) (в дб.)
- запас по фазе, в град. (рад.)
Замечание: Замкнутая система
будет однозначно устойчивой,
если ЛАЧХ целиком лежит ниже
оси 0, а фазовая имеет всплеск
над осью
91.
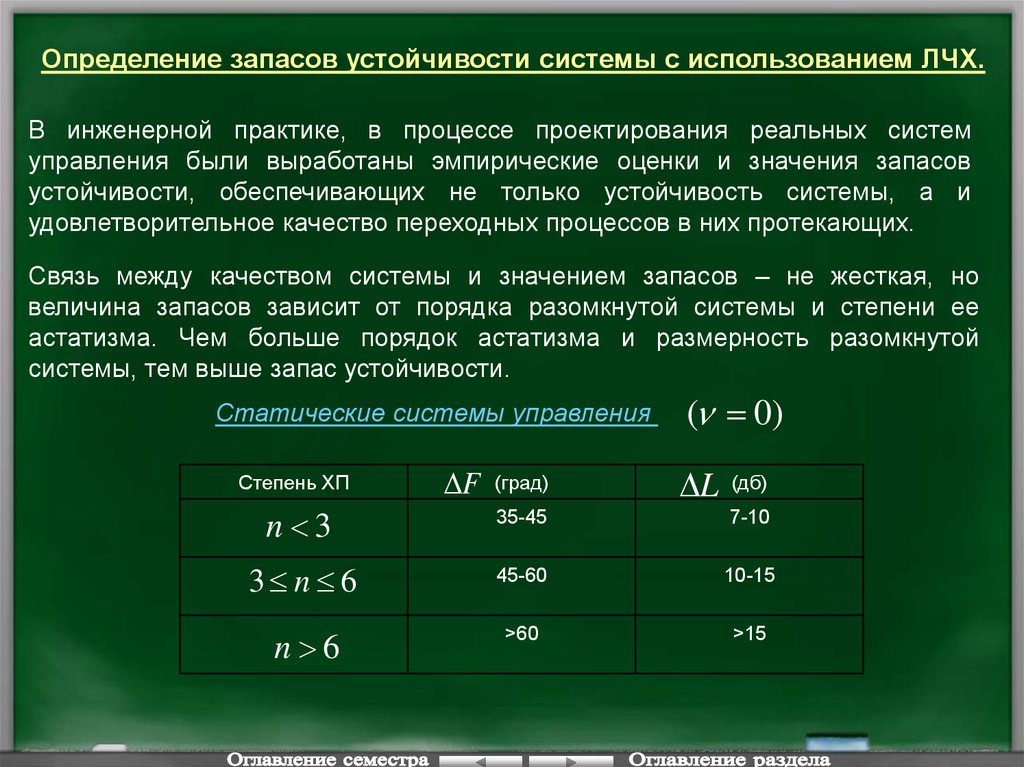
Определение запасов устойчивости системы с использованием ЛЧХ.В инженерной практике, в процессе проектирования реальных систем
управления были выработаны эмпирические оценки и значения запасов
устойчивости, обеспечивающих не только устойчивость системы, а и
удовлетворительное качество переходных процессов в них протекающих.
Связь между качеством системы и значением запасов – не жесткая, но
величина запасов зависит от порядка разомкнутой системы и степени ее
астатизма. Чем больше порядок астатизма и размерность разомкнутой
системы, тем выше запас устойчивости.
Статические системы управления
Степень ХП
F
(град)
( 0)
L
(дб)
n 3
35-45
7-10
3 n 6
45-60
10-15
n 6
>60
>15
92.
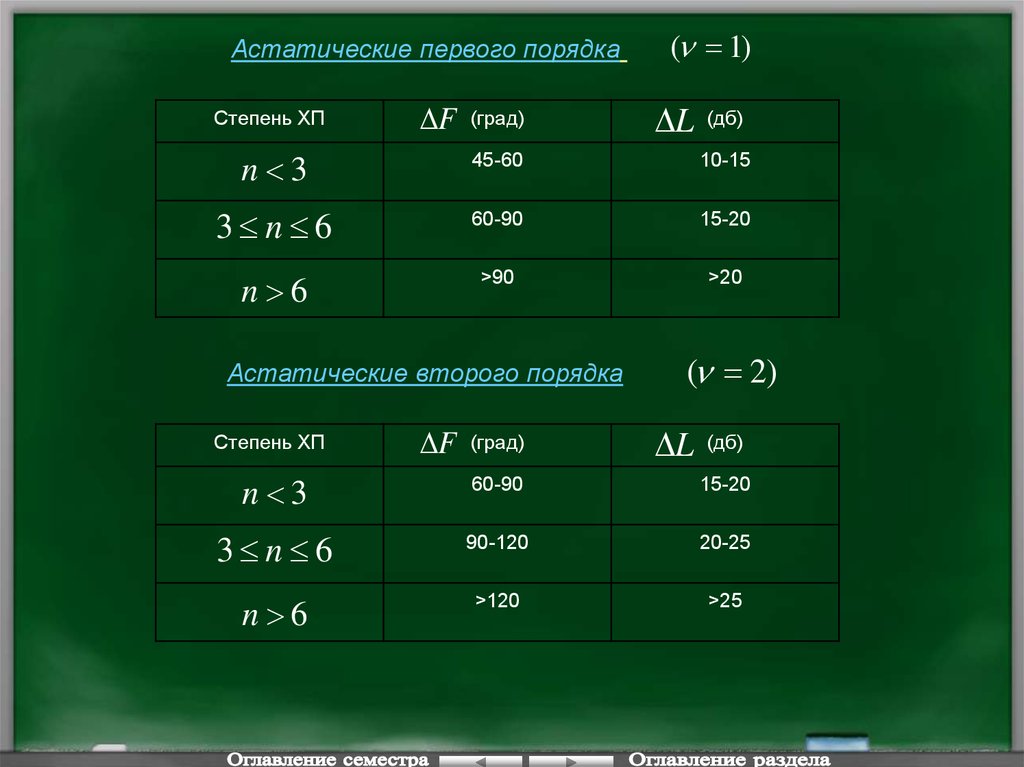
Астатические первого порядкаСтепень ХП
F
(град)
( 1)
L
(дб)
n 3
45-60
10-15
3 n 6
60-90
15-20
n 6
>90
>20
Астатические второго порядка
Степень ХП
F
(град)
( 2)
L
(дб)
n 3
60-90
15-20
3 n 6
90-120
20-25
n 6
>120
>25
93.
Синтез систем автоматического управленияметодом типовых регуляторов.
Существует 5 типовых регуляторов. Среди этих регуляторов есть простые и сложные.
1) П – пропорциональный регулятор, W(p)=k (является простым, т.к.
один параметр настройки - k). Является статическим регулятором.
1
2) И – интегрирующий регулятор W ( p)
TИ p
Так же является простым, но в отличие от первого он является астатическим.
3) ПИ – пропорционально-интегральный регулятор
W ( p) k
Является сложным и астатическим.
4) ПД – пропорционально-дифференциальный регулятор
W ( p)
P
k TД p
T T Д
Tp 1
T 0
1
TИ p
TИ p
W И ( p) k T Д p
- является сложным и статическим.
5) ПИД – пропорционально-интегрально дифференцируемый регулятор
W ( p) k T Д p
1
- является сложным и астатическим
94.
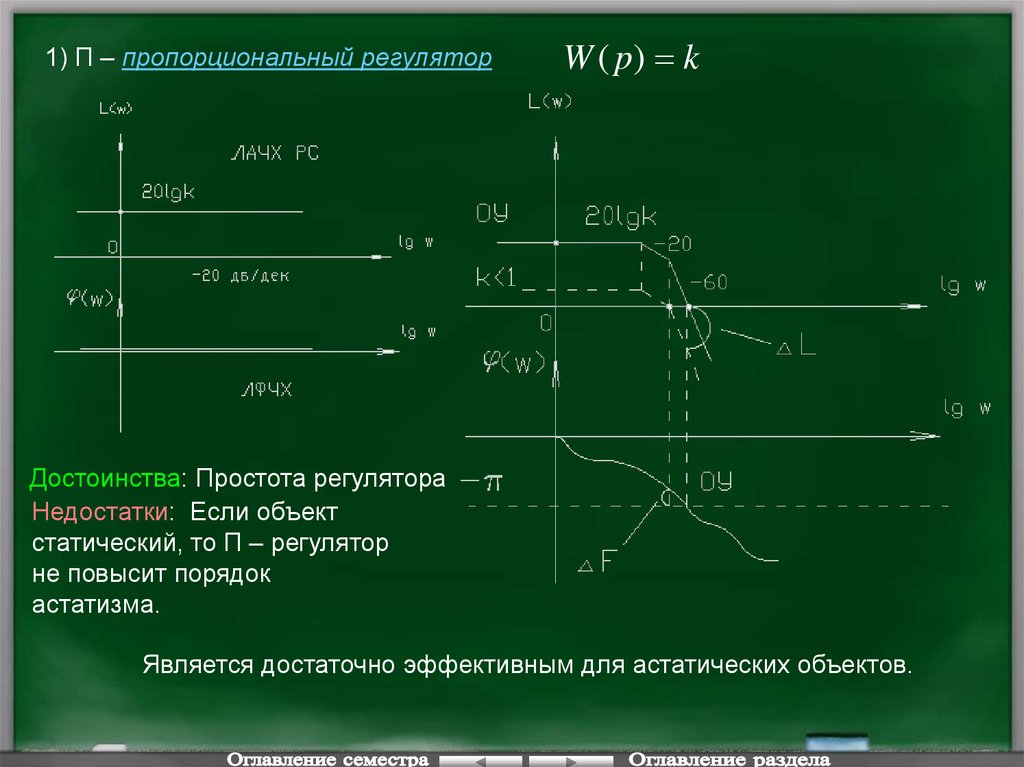
1) П – пропорциональный регуляторW ( p) k
Достоинства: Простота регулятора
Недостатки: Если объект
статический, то П – регулятор
не повысит порядок
астатизма.
Является достаточно эффективным для астатических объектов.
95.
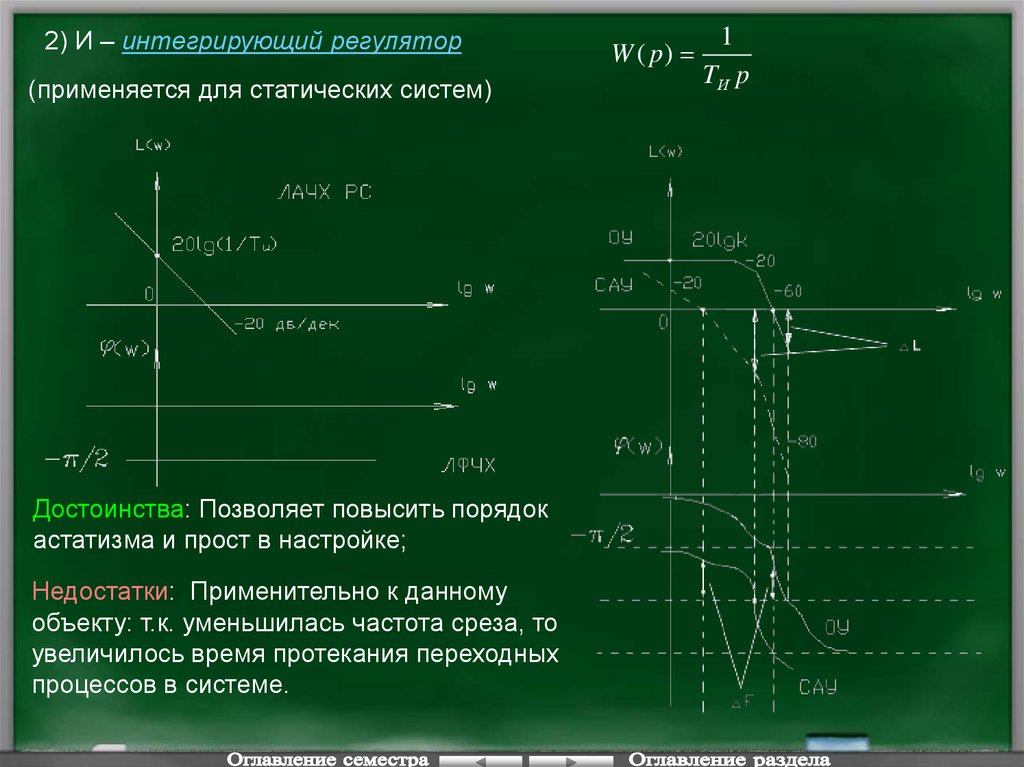
2) И – интегрирующий регулятор(применяется для статических систем)
Достоинства: Позволяет повысить порядок
астатизма и прост в настройке;
Недостатки: Применительно к данному
объекту: т.к. уменьшилась частота среза, то
увеличилось время протекания переходных
процессов в системе.
W ( p)
1
TИ p
96.
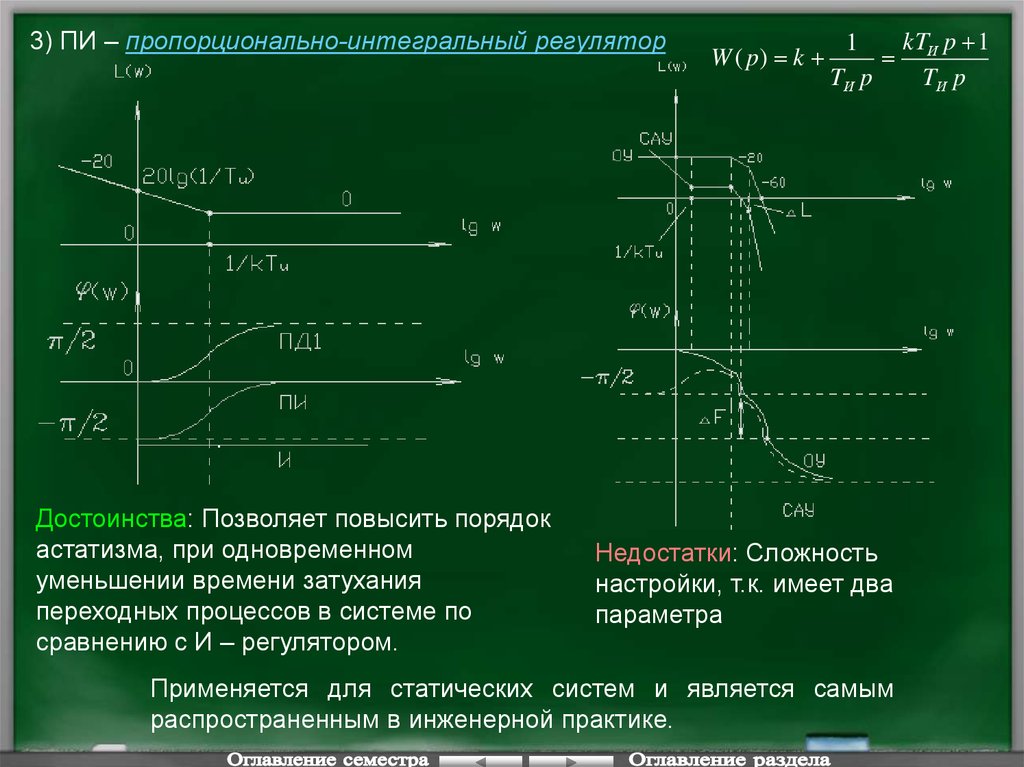
3) ПИ – пропорционально-интегральный регуляторW ( p) k
1
TИ p
.
Достоинства: Позволяет повысить порядок
астатизма, при одновременном
уменьшении времени затухания
переходных процессов в системе по
сравнению с И – регулятором.
Недостатки: Cложность
настройки, т.к. имеет два
параметра
Применяется для статических систем и является самым
распространенным в инженерной практике.
kTИ p 1
TИ p
97.
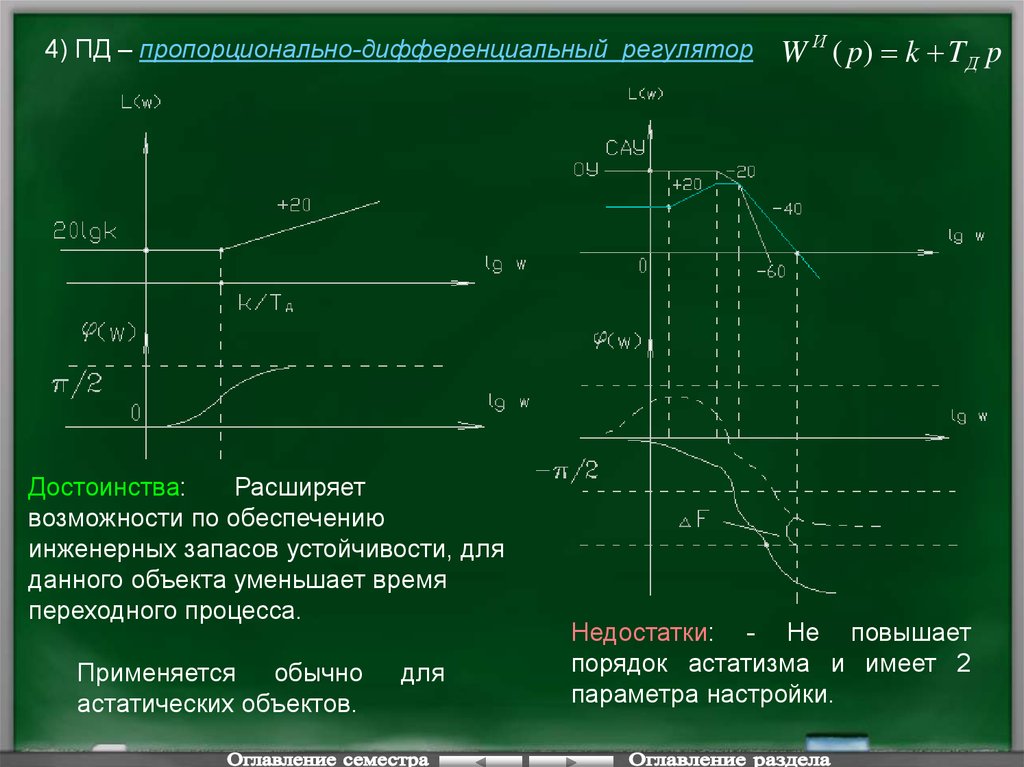
4) ПД – пропорционально-дифференциальный регуляторДостоинства:
Расширяет
возможности по обеспечению
инженерных запасов устойчивости, для
данного объекта уменьшает время
переходного процесса.
Применяется обычно
астатических объектов.
для
W И ( p) k T Д p
Недостатки: - Не повышает
порядок астатизма и имеет 2
параметра настройки.
98.
5) ПИД – пропорционально-интегрально дифференцируемый регуляторW ( p) k T Д p
1
TИ p
TИ T Д p 2 kTИ p 1
TИ p
99.
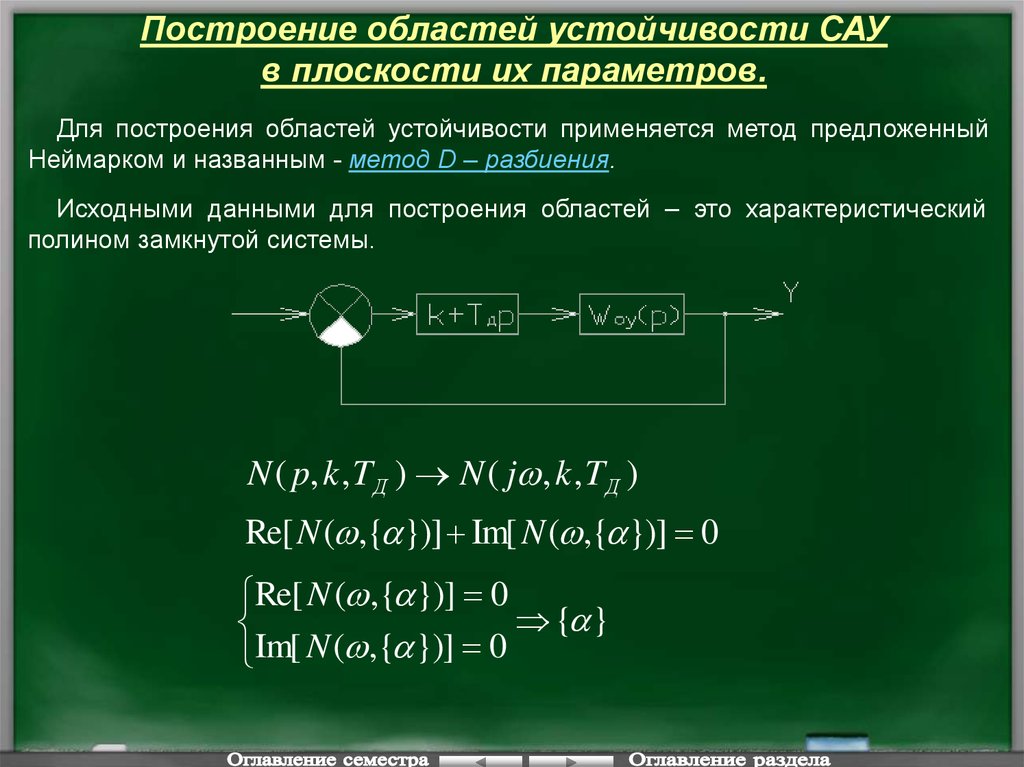
Построение областей устойчивости САУв плоскости их параметров.
Для построения областей устойчивости применяется метод предложенный
Неймарком и названным - метод D – разбиения.
Исходными данными для построения областей – это характеристический
полином замкнутой системы.
N ( p, k , T Д ) N ( j , k , T Д )
Re[ N ( ,{ })] Im[ N ( ,{ })] 0
Re[ N ( ,{ })] 0
{ }
Im[ N ( ,{ })] 0
100.
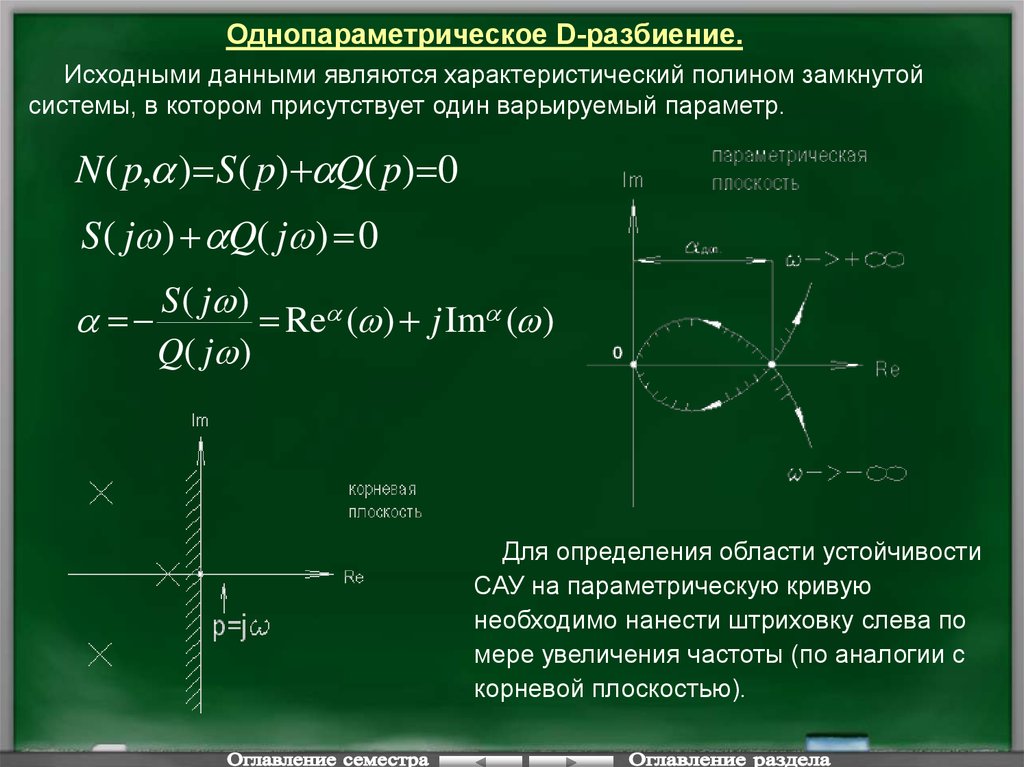
Однопараметрическое D-разбиение.Исходными данными являются характеристический полином замкнутой
системы, в котором присутствует один варьируемый параметр.
N ( p, ) S ( p) Q( p) 0
S ( j ) Q( j ) 0
S ( j )
Re ( ) j Im ( )
Q( j )
Для определения области устойчивости
САУ на параметрическую кривую
необходимо нанести штриховку слева по
мере увеличения частоты (по аналогии с
корневой плоскостью).
101.
Примечание: для построения параметрического годографа необязательнодо . Достаточно брать
от 0 до ,
изменять частоту от
при этом оставшаяся часть будет зеркальным отражением построенного участка
вещественной оси. Так как варьируемый параметр (k ,T , ai ) является
вещественным числом, то из полученной области устойчивости выделяется
только отрезок вещественной оси, лежащей в области устойчивости.
Двухпараметрическое D-разбиение
Исходные данные: характеристический полином замкнутой системы, в
который входят два варьируемых параметра.
K1( ) L1( ) M1( )
K 2 ( ) L2 ( ) M 2 ( )
K1( ) L1( )
M1( ) L1( )
1
;
M 2 ( ) L2 ( )
K 2 ( ) L2 ( )
N ( p, , ) K ( p) L( p) M ( p) 0
p j
K ( j ) K1( ) jK 2 ( )
L( j ) L ( ) jL ( )
1
2
M ( j ) M ( ) jM ( )
1
2
K1( ) M1( ) 1 ; 2
2
K ( j ) L( j ) M ( j ) 0
K 2 ( ) M 2 ( )
102.
Так как M2 L2 и K2 являются нечетными функциями, то и , и 21
также нечетные функции, а функции и будут четными. При построении
параметрических кривых необходимо соблюдать следующее: по оси абсцисс
располагается параметр , а по оси ординат - .
Рассмотрим три возможных случая решения систем уравнений.
1)
2)
Уравнения совместны и
имеют общее решение
Уравнения несовместны и не
имеют общее решение
103.
3)K ( k ) L( k ) M ( k ) 0
-
- уравнение особой прямой
Особая прямая – линия, построенная при одном и
том же значении
k
В большинстве практических случаев особые
и
прямые получаются при
В этом случае, хотя бы 1 из параметров -
0
.
или
входит в коэффициенты,
соответствующие свободному числу
an.
старшему числу характеристического полинома -
При
0 берется an , а при a0.
Если
a0
an
и
независимы от
и
1. (Для параметрической кривой) При возрастании
D-разбиения заштриховывается слева, если
и
четные, то при
0
от
до
, и справа, если
граница
0.
Так как
0 и 0 кривые совпадают. Таким образом,
кривая D-разбиения обходится дважды и поэтому она всегда заштриховывается
двойной штриховкой.
или
, то особых прямых нет.
Правила штриховки параметрических кривых и особых прямых.
функции
a0
104.
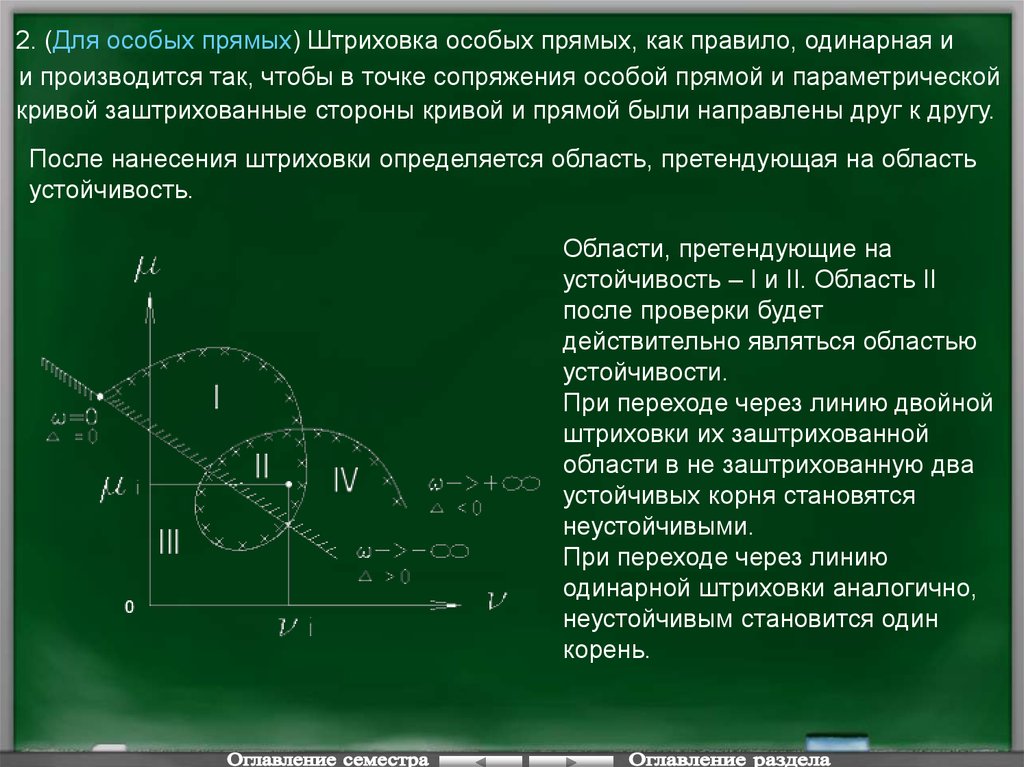
2. (Для особых прямых) Штриховка особых прямых, как правило, одинарная ии производится так, чтобы в точке сопряжения особой прямой и параметрической
кривой заштрихованные стороны кривой и прямой были направлены друг к другу.
После нанесения штриховки определяется область, претендующая на область
устойчивость.
Области, претендующие на
устойчивость – I и II. Область II
после проверки будет
действительно являться областью
устойчивости.
При переходе через линию двойной
штриховки их заштрихованной
области в не заштрихованную два
устойчивых корня становятся
неустойчивыми.
При переходе через линию
одинарной штриховки аналогично,
неустойчивым становится один
корень.
105.
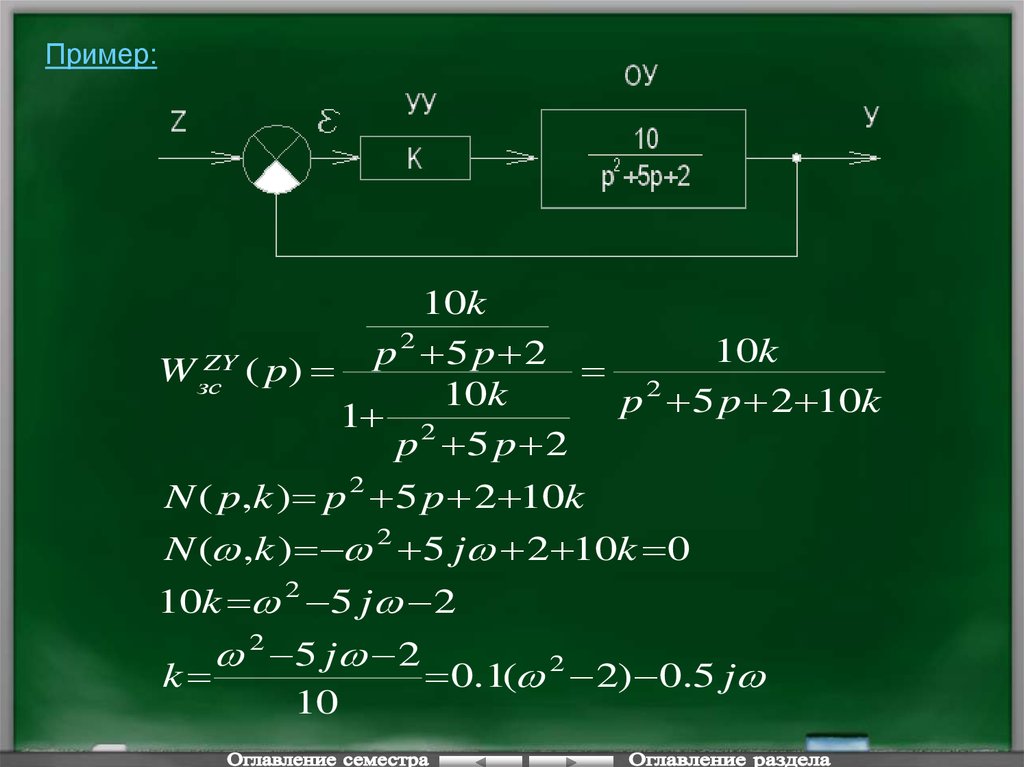
Пример:10k
2
10k
p
5
p
2
ZY
W зс ( p)
2
10k
p 5 p 2 10k
1 2
p 5 p 2
N ( p,k ) p 2 5 p 2 10k
N ( ,k ) 2 5 j 2 10k 0
10k 2 5 j 2
k
2 5 j 2
10
0.1( 2 2) 0.5 j
106.
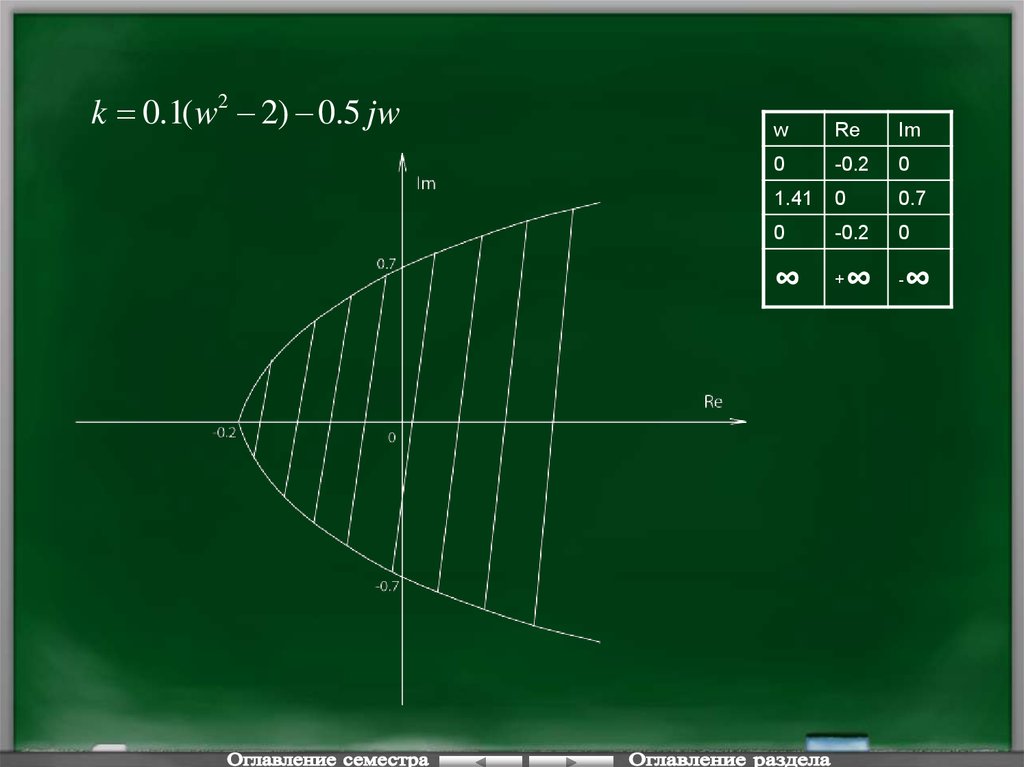
k 0.1( w2 2) 0.5 jww
Re
Im
0
-0.2
0
1.41
0
0.7
0
-0.2
0
∞
+
∞ -∞
107.
Оценка качества управления в линейныхавтоматических
системах.
Основные понятия и определения.
Под качеством управления в динамической системе понимают совокупность
показаний как качественного, так и количественного типа, которые характеризует
основные свойства системы и в установившемся состоянии и в процессе
реализации функции управления. Эти показатели также должны позволять
произвести оценку соответствия результатов управления целям и требованиям
управляемой технологии.
К качественным показателям относят такие оценки как:
- быстродействие;
- колебательность;
- астатизм …
Для оценки качества систем управления используют понятие как критерий
качества. Под ним понимается математическое выражение или система
выражений, позволяющая вычислить количественную оценку качества
управления по результатам исследований системы или ее математической
модели.
108.
Методы оценки качества и видыиспытываемых воздействий для оценки.
В теории управления применяют два основных подхода для оценки
качества:
- Прямая оценка качества (осуществляется по переходному процессу);
-Косвенная оценка качества (осуществляется по другим характеристикам,
например, частотным или корневым).
Прямые методы исследования качества САУ.
Они состоят из 2-х основных этапов:
1) Построение переходного процесса;
2) Исследование переходного процесса и формирование показателей
качества и критериев оценки.
Построение переходных процессов возможно 2-мя путями.
а) Экспериментальное исследование (в условиях эксплуатации)
б) Моделирование переходных процессов в системе (применяют при
теоретическом исследовании и математическом моделировании).
109.
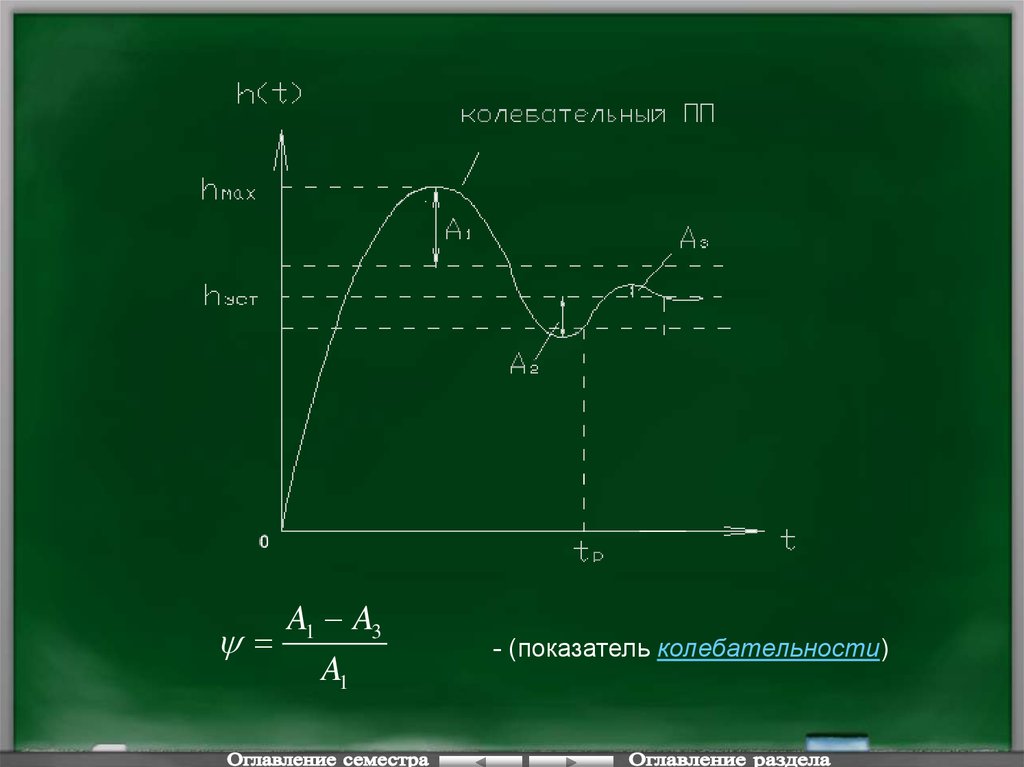
Оценка качества системы управления по виду переходного процесса.Вид переходного процесса зависит не только от динамических и статических
свойств исследования системы, но и от вида входных воздействий, для которых этот
процесс получен. Чаще всего переходным процессом называют реакцию системы на
единичное ступенчатое воздействие.
1) Переходной процесс с
перерегулированием, где
- величина перерегулирования.
hMAX hУСТ
100%
hУСТ
В реальных системах
35%
2) Апериодический переходной процесс
Δдоп – допустимая трубка регулирования
(по сути – допустимое отклонение
переходного процесса от hУСТ
Δдоп = 1% - 10%
Самые распространенные – 3% и 5%
t H - время нарастания переходного процесса;
t MAX - время достижения первого максимума;
tp1
tp2
- время регулирования
переходного процесса
110.
A1 A3A1
- (показатель колебательности)
111.
Построение переходных процессов в САУ.1) По изображению переходного процесса (по Лапласу);
2) По весовой функции системы;
3) Прямым решением ДУ (описывающим динамику объектов этой системы).
1)
Y ( p)
W ( p)
; Y ( p) W ( p) X ( p)
X ( p)
Для определения Y(p) важно знать изображение по Лапласу входного сигнала.
L 1{Y ( p)} Y (t ) применяется в основном для типовых входных воздействий
(т.к . для них есть изображение по Лапласу).
2) Более универсальный способ по сравнению с предыдущим, т.к.
применим для входных испытываемых воздействий любого сложного вида
представимого в графической или аналитической формах.
Сущность подхода заключается в том, что реакция системы на
входное воздействие произвольного вида может рассматриваться для
линейных систем как суммарная реакция на Δ-функцию.
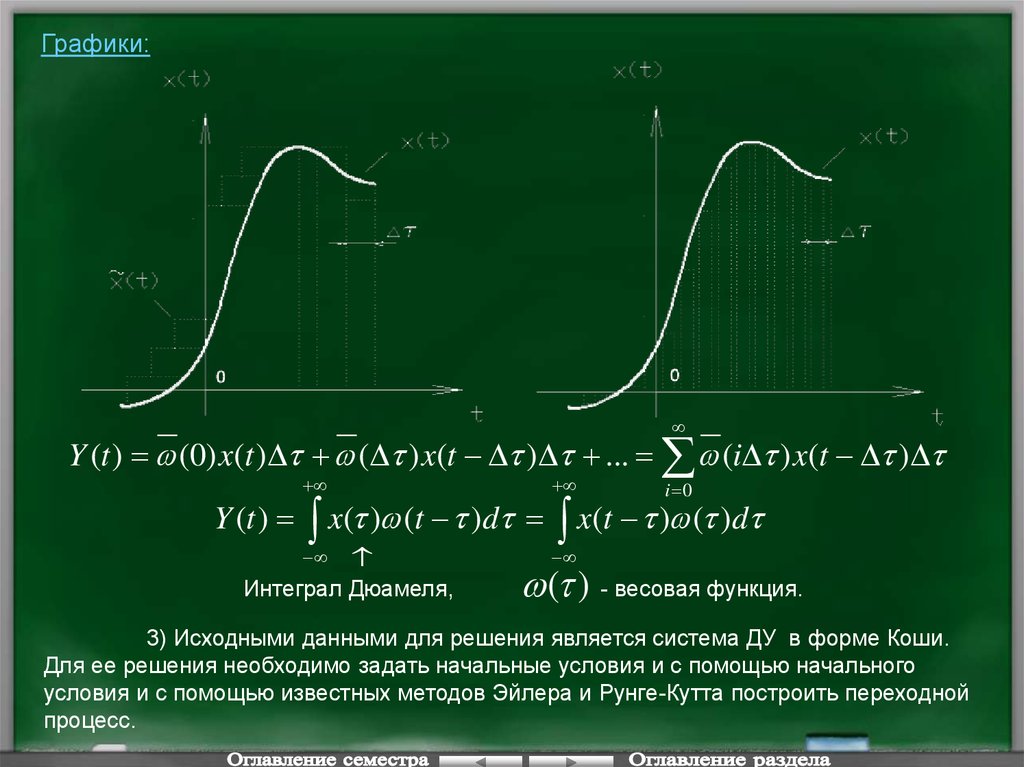
112.
Графики:Y (t ) (0) x(t ) ( ) x(t ) ... (i ) x(t )
Y (t )
i 0
x( ) (t )d x(t ) ( )d
Интеграл Дюамеля,
( ) - весовая функция.
3) Исходными данными для решения является система ДУ в форме Коши.
Для ее решения необходимо задать начальные условия и с помощью начального
условия и с помощью известных методов Эйлера и Рунге-Кутта построить переходной
процесс.
113.
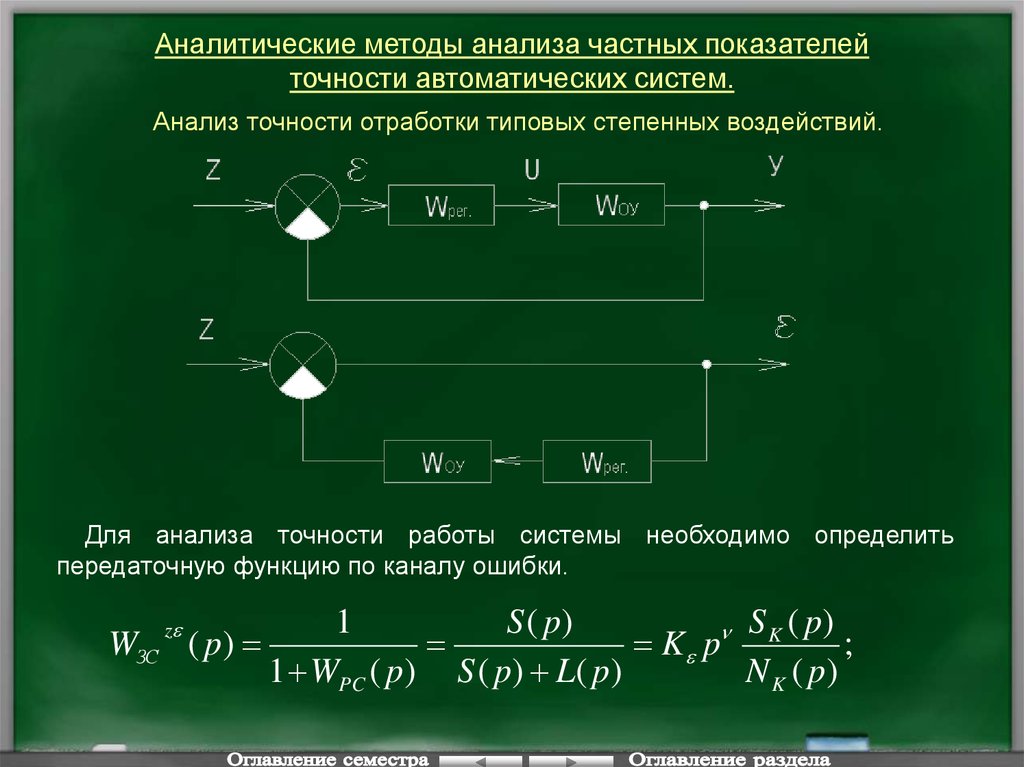
Аналитические методы анализа частных показателейточности автоматических систем.
Анализ точности отработки типовых степенных воздействий.
Для анализа точности работы системы необходимо определить
передаточную функцию по каналу ошибки.
z
WЗС ( p)
1
S ( p)
S ( p)
K p K
;
1 WPC ( p) S ( p) L( p)
N K ( p)
114.
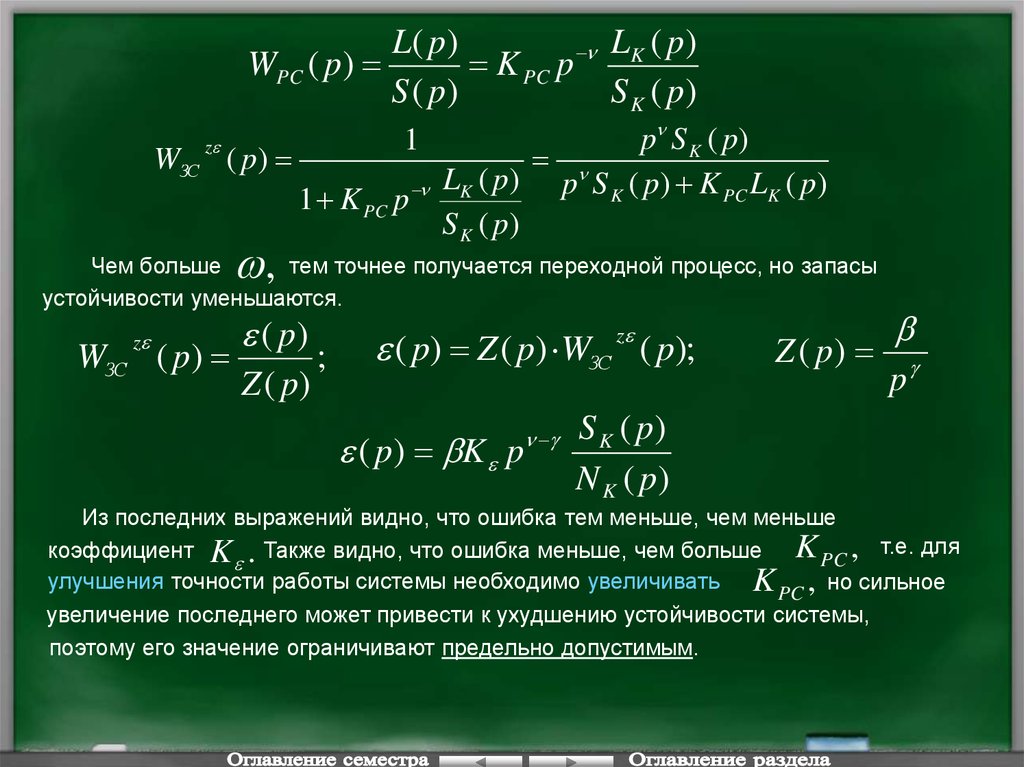
L( p )LK ( p )
WPC ( p)
K PC p
S ( p)
S K ( p)
1
z
WЗС ( p)
1 K PC p
,
p S K ( p)
LK ( p) p S K ( p) K PC LK ( p)
S K ( p)
Чем больше
тем точнее получается переходной процесс, но запасы
устойчивости уменьшаются.
z
WЗС ( p)
( p)
Z ( p)
;
z
( p) Z ( p) WЗС ( p);
( p) K p
Z ( p)
p
S K ( p)
N K ( p)
Из последних выражений видно, что ошибка тем меньше, чем меньше
коэффициент K . Также видно, что ошибка меньше, чем больше K PC , т.е. для
улучшения точности работы системы необходимо увеличивать K PC , но сильное
увеличение последнего может привести к ухудшению устойчивости системы,
поэтому его значение ограничивают предельно допустимым.
115.
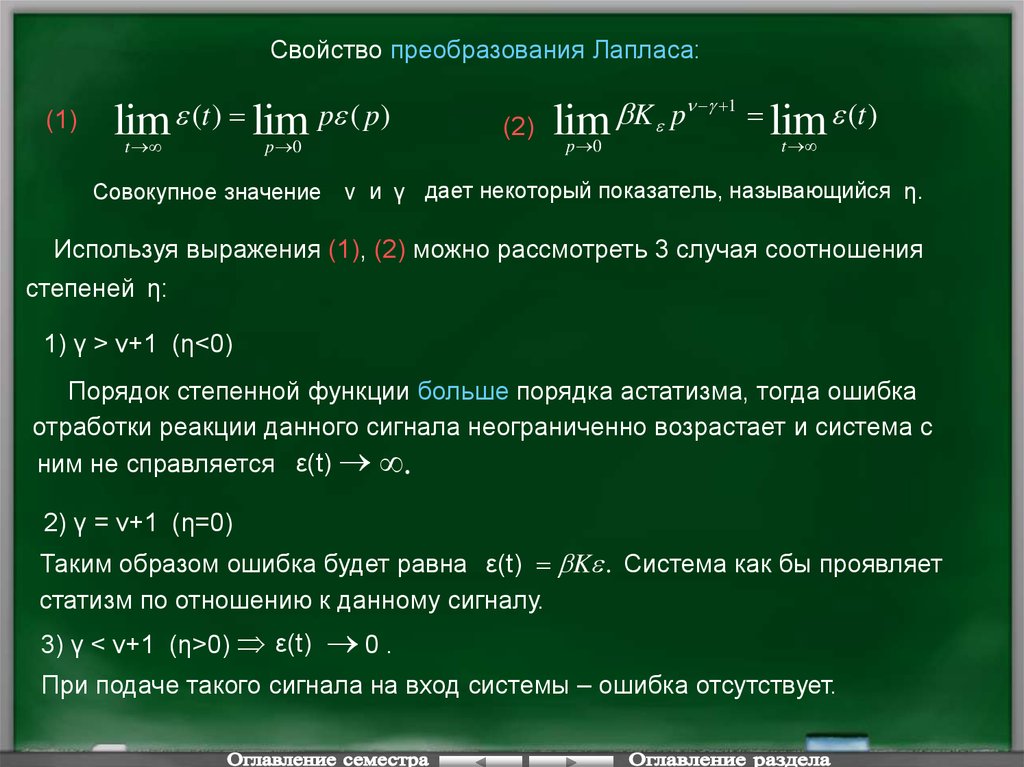
Свойство преобразования Лапласа:(1)
lim (t ) lim p ( p)
t
p 0
Совокупное значение
1
K
p
lim (t )
(2) lim
p 0
t
ν и γ дает некоторый показатель, называющийся η.
Используя выражения (1), (2) можно рассмотреть 3 случая соотношения
степеней η:
1) γ > ν+1 (η<0)
Порядок степенной функции больше порядка астатизма, тогда ошибка
отработки реакции данного сигнала неограниченно возрастает и система с
ним не справляется ε(t) .
2) γ = ν+1 (η=0)
Таким образом ошибка будет равна ε(t) K . Система как бы проявляет
статизм по отношению к данному сигналу.
3) γ < ν+1 (η>0) ε(t)
0.
При подаче такого сигнала на вход системы – ошибка отсутствует.
116.
Оценка ошибки в зависимости от порядка астатизма1) Если система является статической, то она отрабатывает единичное
ступенчатое воздействие с ошибкой = K , линейно-нарастающее и
параболическое с ошибкой =
2) Если система является астатической 1 порядка, то при ступенчатом
воздействии ошибка равна нулю, при линейно-нарастающем - K , а при
параболическом стремится к бесконечности
3) При астатизме 2-го порядка, при ступенчатом и линейно-нарастающем,
ошибка равна нулю, а при параболическом - K
117.
Исследование точности установившихся режимов воспроизведенияметодом коэффициентов ошибок.
Для исследования реакции системы на различные виды воздействий можно
разложить в ряд Тейлора в окрестности p 0, при t дробную, рациональную
часть передаточной функции по каналу ошибкой.
1) Для обеспечения разложения функции определим частотные производные
по оператору p и находим их численные значения при p=0.
z
WЗС ( p) K p WK ( p)
WK ( p) C0 C1 p C2 p 2 ...
iWK ( p)
Ci
i! pi
( p) K (C0 p C1 p 1 C 2 p 2 ...)Z ( p)
(t ) K (C0 z (t ) ( ) C1 z (t ) ( 1) C2 z (t ) ( 2) ...)
118.
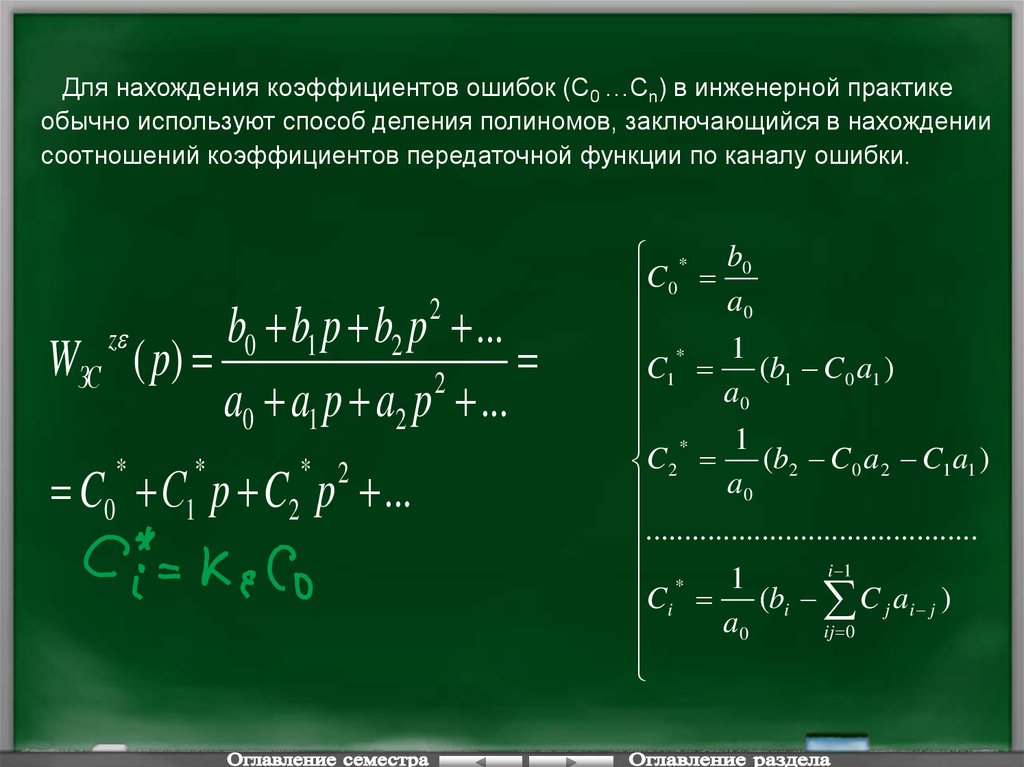
Для нахождения коэффициентов ошибок (С0 …Сn) в инженерной практикеобычно используют способ деления полиномов, заключающийся в нахождении
соотношений коэффициентов передаточной функции по каналу ошибки.
WЗС
z
b0 b1 p b2 p ...
( p)
2
a0 a1 p a2 p ...
2
C0 С p C2 p ...
*
*
1
* 2
* b0
C 0 a
0
* 1
C1 a (b1 C 0 a1 )
0
* 1
(b2 C 0 a 2 C1 a1 )
C 2
a0
...........................................
i 1
C * 1 (b C a )
i
j i j
i
a0
ij 0
119.
Методы косвенной (приближенной) оценки качества линейных систем.Частотные методы косвенной оценки.
Частотные методы обусловлены наличием связи между временными
процессами и их Фурье изображением.
Y ( p) W ( p) Z ( p)
Y ( j ) W ( j ) Z ( j )
Если задано изображение Фурье входного сигнала, то переходной
процесс связан с ним выражением для обратного преобразования Фурье.
1
Y (t )
2
j t
Y
(
j
)
e
d
120.
Если входным воздействием является ступенчатая функция, у которойизображение:
Z ( j )
j
то найти Y(t) можно по формуле:
Y (t )
2
0
Re ЗС ( )
sin( )d
(1)
121.
Качественная и приближенная количественная оценки переходныхпроцессов в линейных системах по ВЧХ.
Связь между переходным процессом и ВЧХ базируется на формуле
(1) и характерным рядом фундаментальны свойств, позволяющих по
внешнему виду ВЧХ и отдельным качественным характеристикам с
достаточной для инженерной практики точностью оценивать вид и
отдельные характеристики переходных процессов.
Свойства:
1) Линейность связи ВЧХ переходных процессов
n
n
Re ( ) Re ( ) Y (t ) Yi (t )
ЗС
i
i 1
Yi
i 1
- составляющая переходного процесса, полученная из
по формуле (1)
На этом свойстве базируется метод трапеций.
Re i ( )
122.
2) Изменение масштабова) Амплитудных (ось ординат)
Re( ) Y (t )
б) Аргументных (ось абсцисс)
t
2 Re ЗС ( )
Y( )
0
t
2 Re ЗС ( )
sin( )d
sin( t )d
0
t
Наблюдается обратная зависимость.
123.
3) Обратность соответствия предельных значений, основано на предельнойтеореме
ЗС
Y
(
t
)
Re
lim
lim ( )
t 0
ЗС
Y
(
t
)
Re
lim
lim ( )
t
0
124.
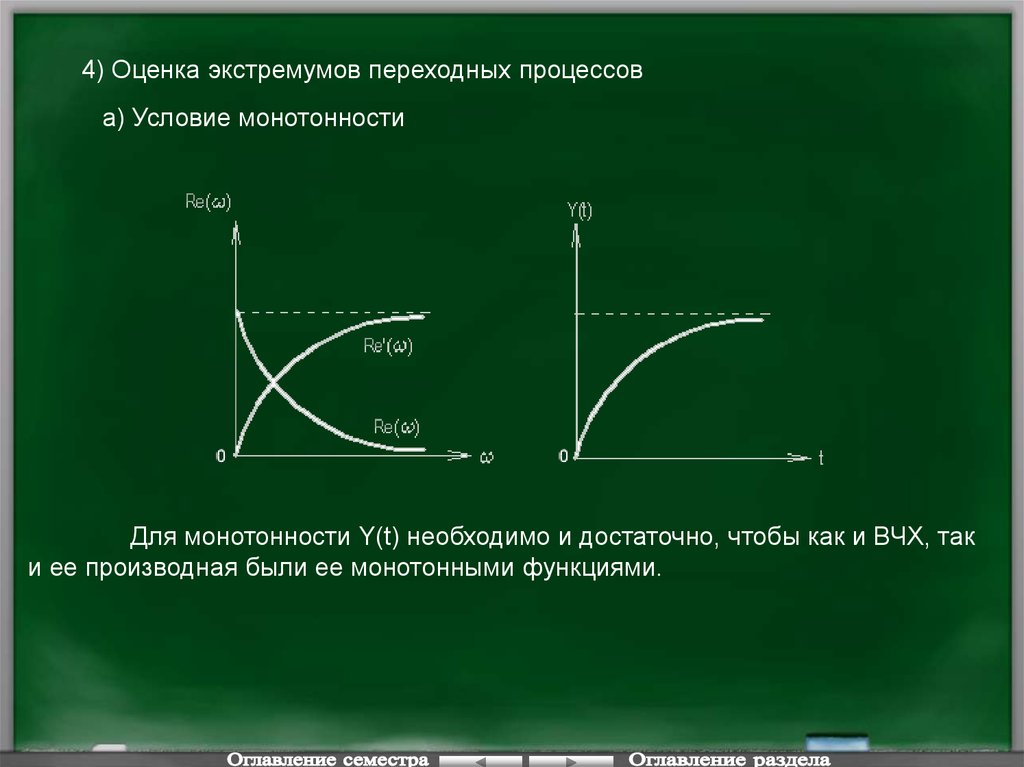
4) Оценка экстремумов переходных процессова) Условие монотонности
Для монотонности Y(t) необходимо и достаточно, чтобы как и ВЧХ, так
и ее производная были ее монотонными функциями.
125.
б) Условия ограничения перерегулированияЕсли ВЧХ является строго убывающей функцией, то перерегулирование
переходного процесса не превышает 18%.
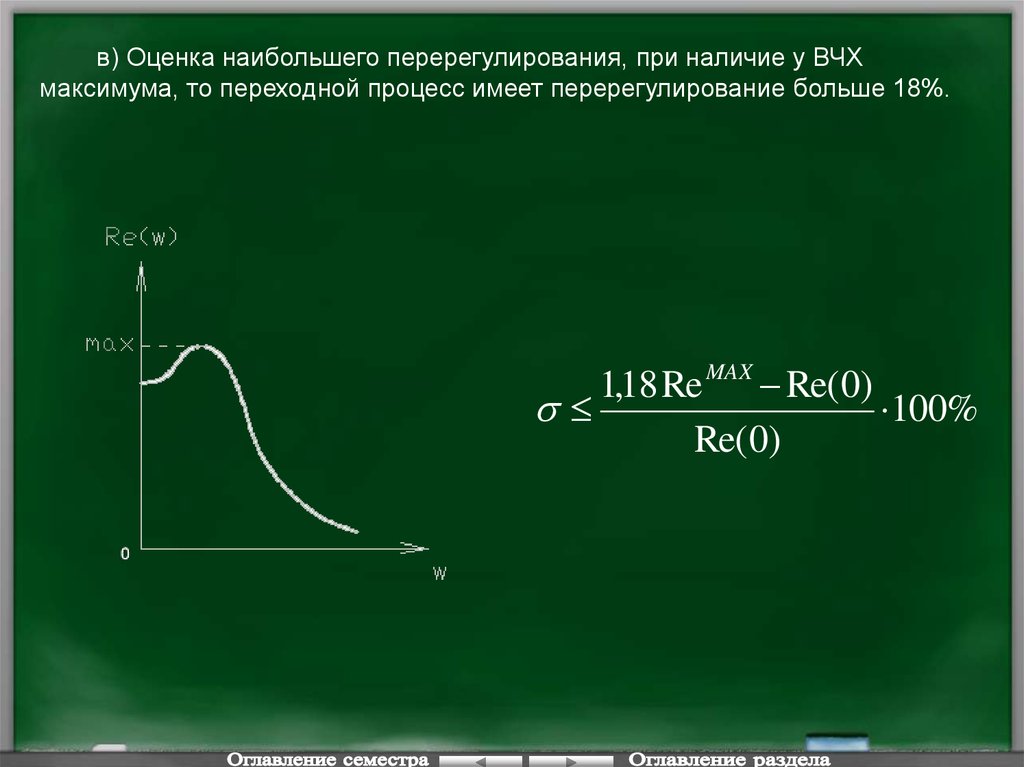
126.
в) Оценка наибольшего перерегулирования, при наличие у ВЧХмаксимума, то переходной процесс имеет перерегулирование больше 18%.
1,18 Re MAX Re( 0)
100%
Re( 0)
127.
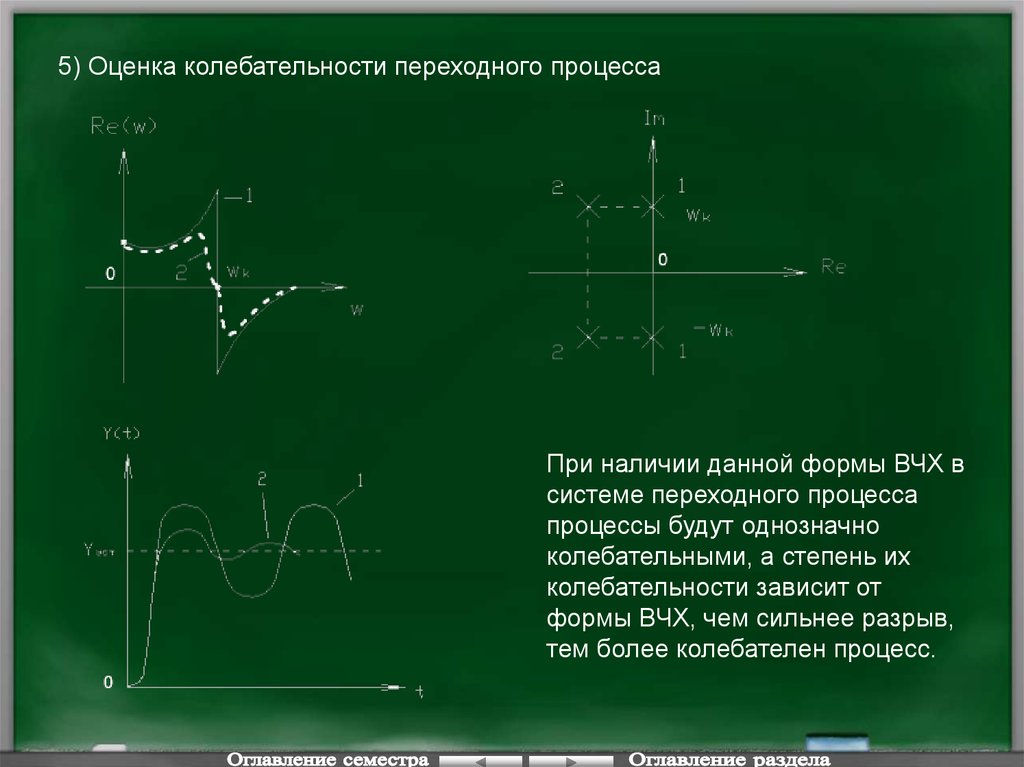
5) Оценка колебательности переходного процессаПри наличии данной формы ВЧХ в
системе переходного процесса
процессы будут однозначно
колебательными, а степень их
колебательности зависит от
формы ВЧХ, чем сильнее разрыв,
тем более колебателен процесс.
128.
6) Условие длительности затухания переходных процессовЕсли ВЧХ имеет строго убывающий характер и по виду близка к
трапеции, то время затухания переходного процесса можно определить
по формуле:
4
tp
2
2
Чем меньше w1, тем длительнее
переходный процесс
129.
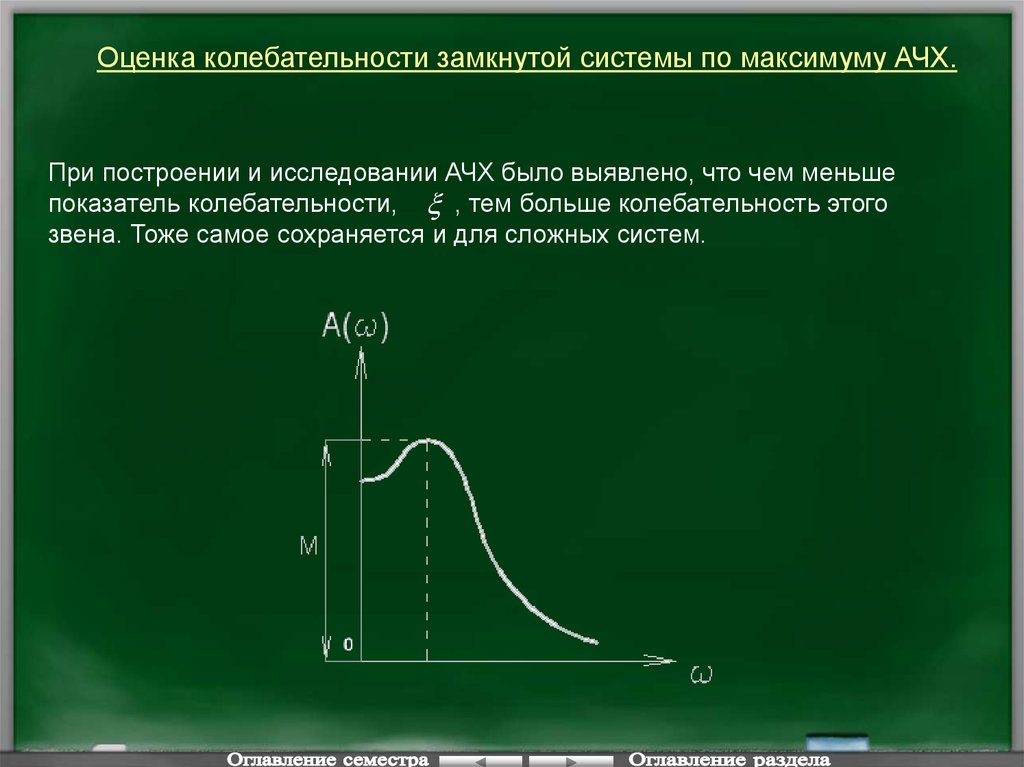
Оценка колебательности замкнутой системы по максимуму АЧХ.При построении и исследовании АЧХ было выявлено, что чем меньше
показатель колебательности, , тем больше колебательность этого
звена. Тоже самое сохраняется и для сложных систем.
130.
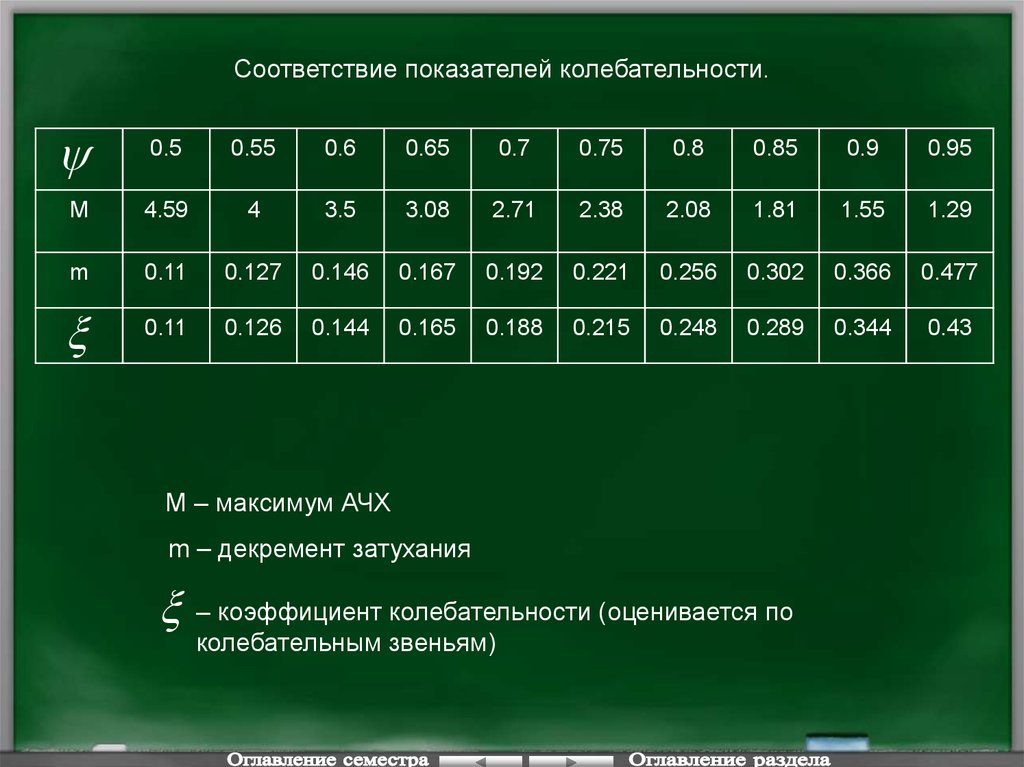
Соответствие показателей колебательности.0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
M
4.59
4
3.5
3.08
2.71
2.38
2.08
1.81
1.55
1.29
m
0.11
0.127
0.146
0.167
0.192
0.221
0.256
0.302
0.366
0.477
0.11
0.126
0.144
0.165
0.188
0.215
0.248
0.289
0.344
0.43
M – максимум АЧХ
m – декремент затухания
– коэффициент колебательности (оценивается по
колебательным звеньям)
131.
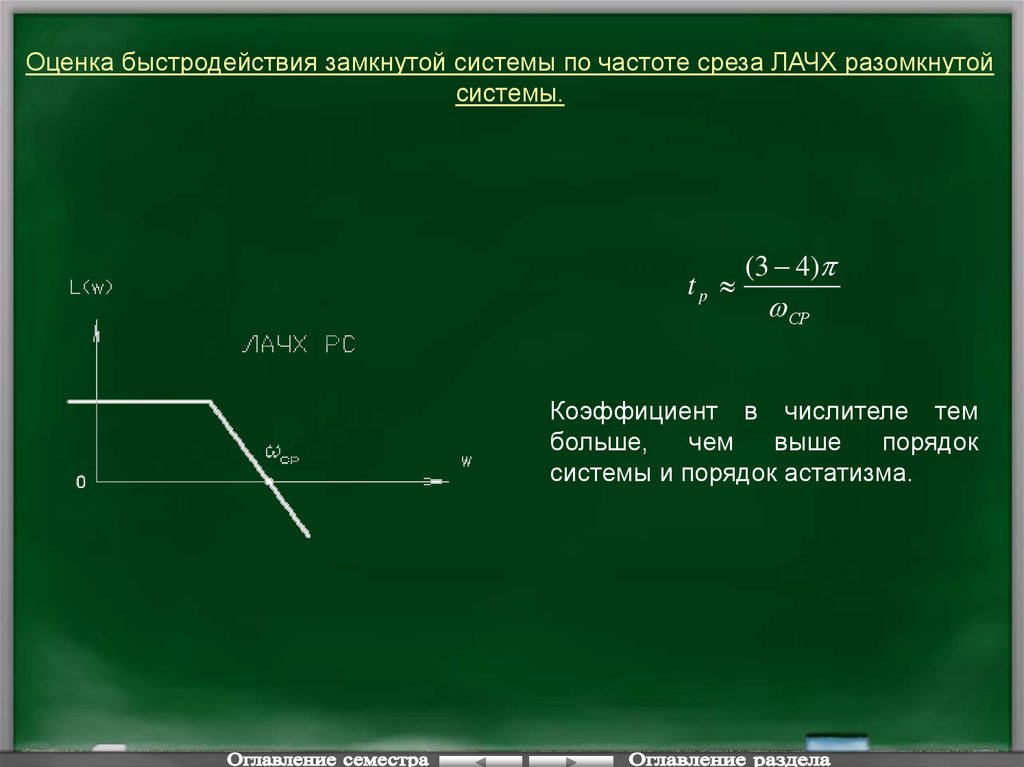
Оценка быстродействия замкнутой системы по частоте среза ЛАЧХ разомкнутойсистемы.
tp
(3 4)
СР
Коэффициент в числителе тем
больше,
чем
выше
порядок
системы и порядок астатизма.
132.
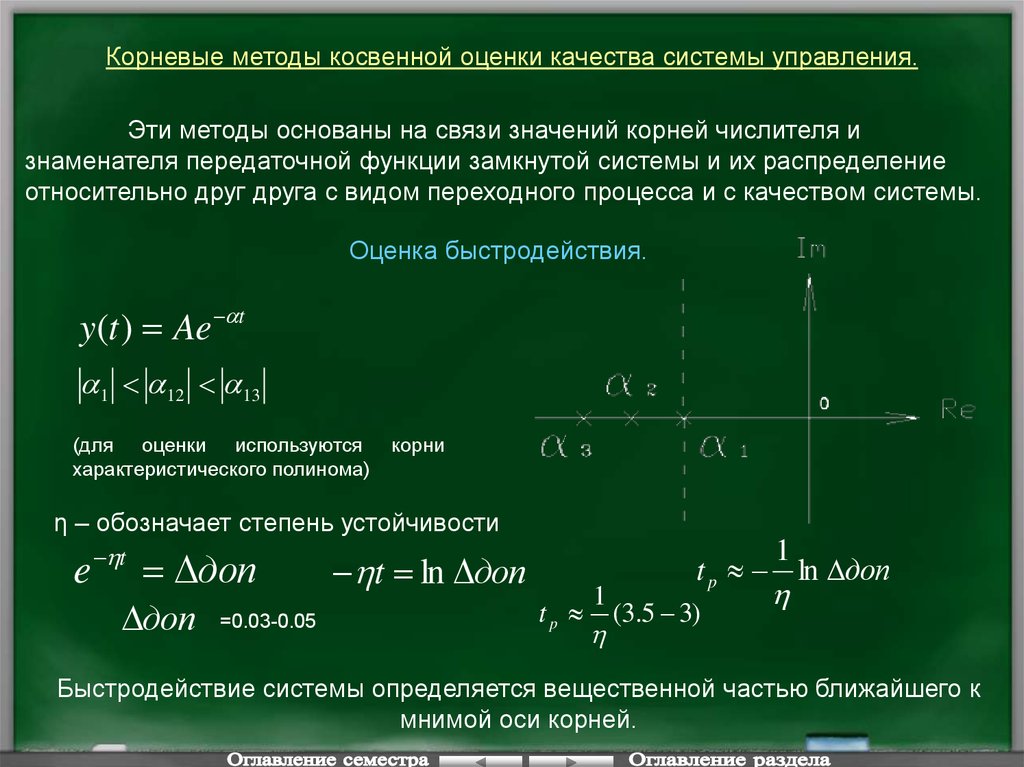
Корневые методы косвенной оценки качества системы управления.Эти методы основаны на связи значений корней числителя и
знаменателя передаточной функции замкнутой системы и их распределение
относительно друг друга с видом переходного процесса и с качеством системы.
Оценка быстродействия.
y(t ) Ae t
1 12 13
(для оценки используются
характеристического полинома)
корни
η – обозначает степень устойчивости
t
e
доп
доп
=0.03-0.05
t ln доп
tp
1
1
t p ln доп
(3.5 3)
Быстродействие системы определяется вещественной частью ближайшего к
мнимой оси корней.
133.
Оценка колебательности.1
m
m
(является более удобным)
1 e
2 m
m
1 m2
Эти формулы справедливы полностью для объектов второго порядка, а
для более высоких, они являются приближенными.
134.
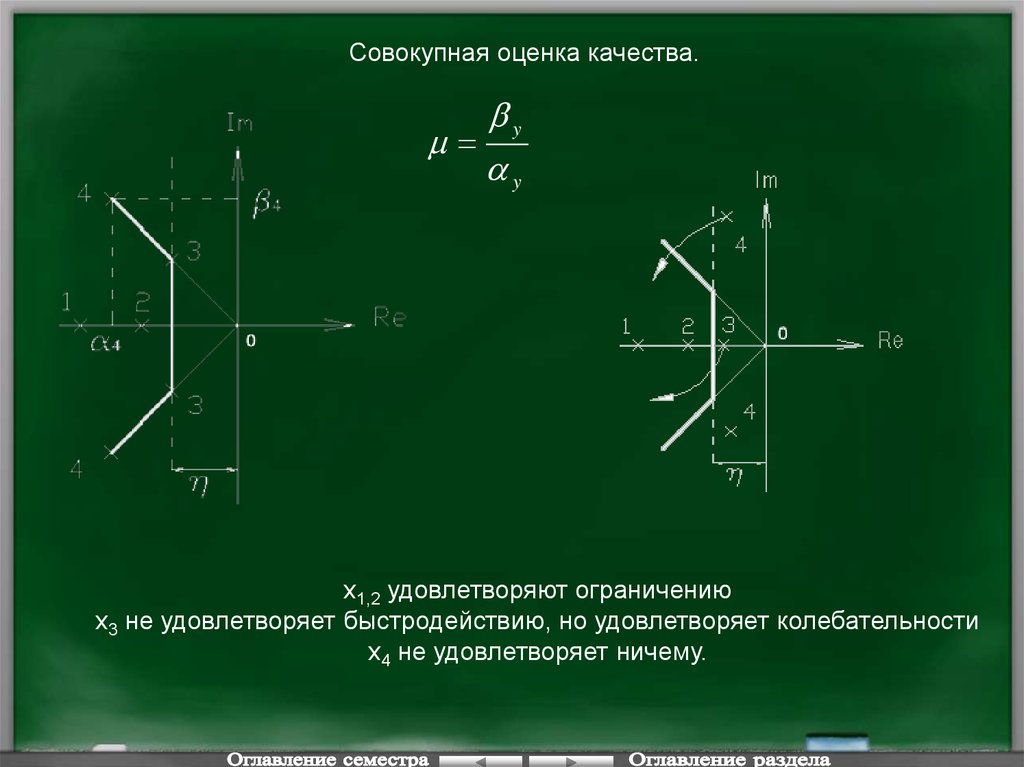
Совокупная оценка качества.y
y
х1,2 удовлетворяют ограничению
х3 не удовлетворяет быстродействию, но удовлетворяет колебательности
х4 не удовлетворяет ничему.