



































 Физика
ФизикаПохожие презентации:






")


")
Системы автоматического управления
1. Системы автоматического управления
Основные понятия теорииавтоматического
управления
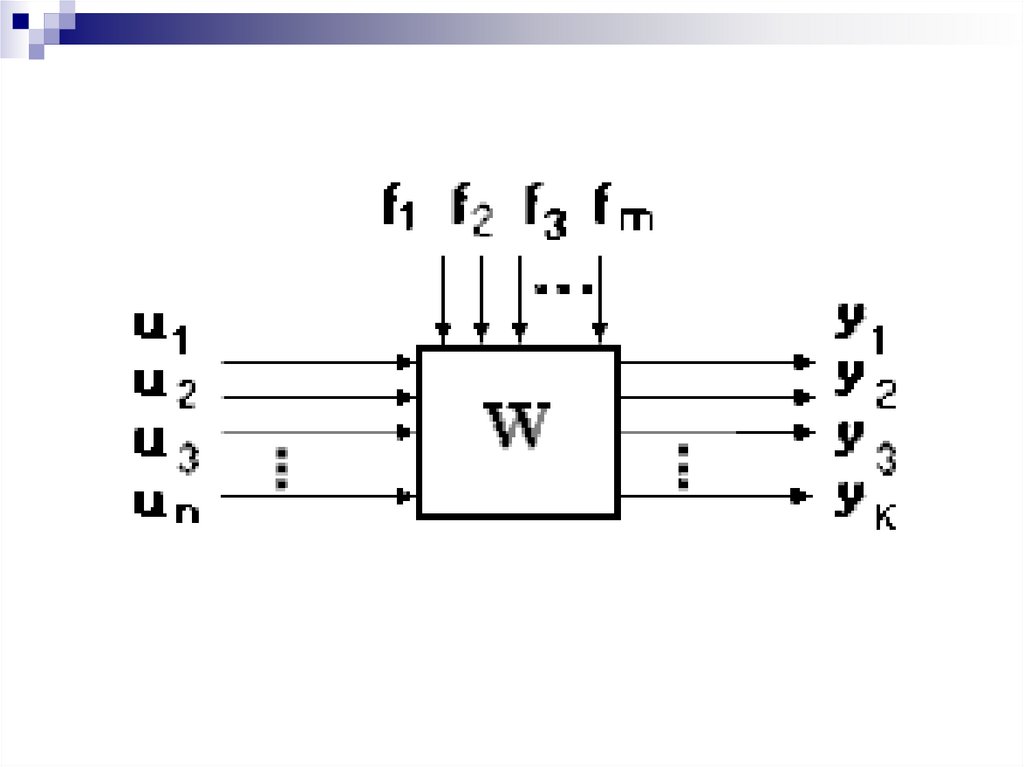
2. Структурная схема САУ
3. Функциональная схема САУ
4.
5. САУ температурой печи
6. Принцип компенсации
7. Принцип обратной связи
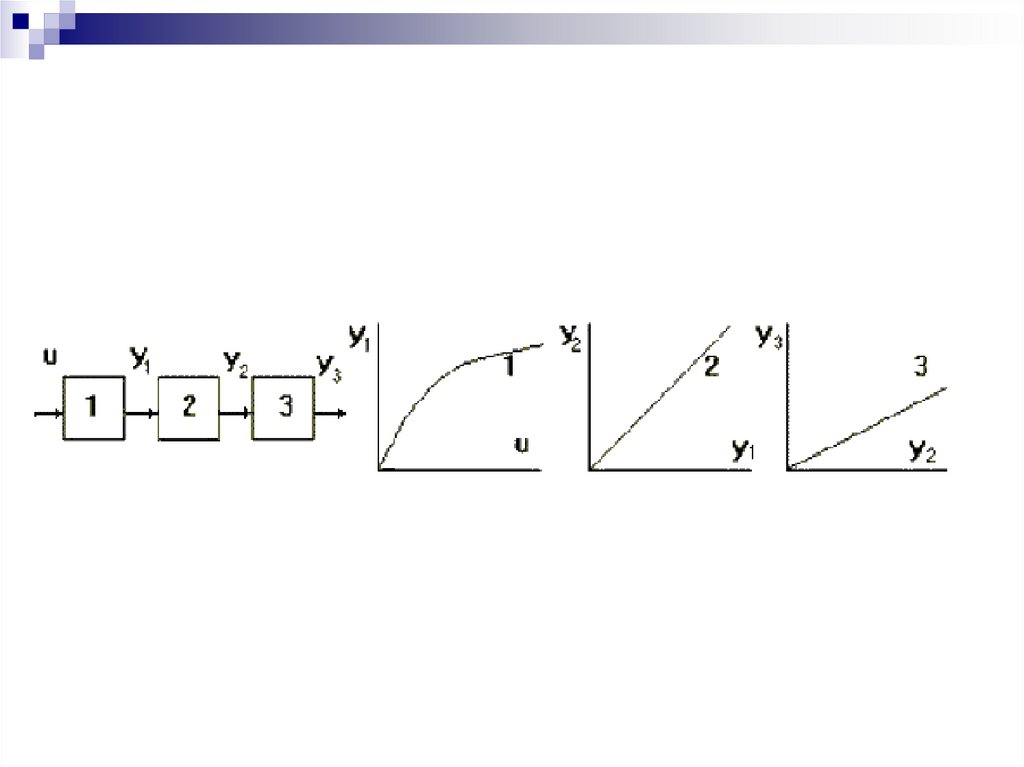
8. Статические характеристики САУ
y = F(u,f)K = y/u
K = Δy/Δu ≠ const.
9.
10. Динамические характеристики
11. Колебательный процесс
12. Уравнение динамики
y(t) = F(u, f, t)Поэтому основным методом исследования
САУ в динамических режимах является
метод решения дифференциальных
уравнений.
Уравнение динамики в общем виде можно
записать так:
F(y, y’, y”,..., y(n), u, u’, u”,..., u(m), f, f ’, f ”,..., f(k)) = 0
13. Передаточная функция
Дифференциальный оператор p = d/dt так, что, dy/dt= py, а pn = dn/dt.
Операция интегрирования записывается как 1/p.
a0pny + a1pn-1y + ... + any = (a0pn + a1pn-1 + ... + an)y
Не надо путать эту форму записи с операционным
исчислением - здесь используются непосредственно
функции времени y(t), u(t) (оригиналы), а не их
изображения Y(p), U(p), получаемые из оригиналов
по формуле преобразования Лапласа.
14. Уравнение динамики
K = bm/an15. Частотные характеристики
u ( t ) U m e j t U m (cos t jsin t )y( t ) Ym e
pu pU m e
j( t )
j t
Ym e
U m j e
j t j
j t
e
j u
p n u p n U m e j t U m ( j ) n e j t ( j ) n u
y
b 0 ( j ) m b1 ( j ) m 1 ... b m
a 0 ( j ) a1 ( j )
n
n 1
... a n
u W ( j )u
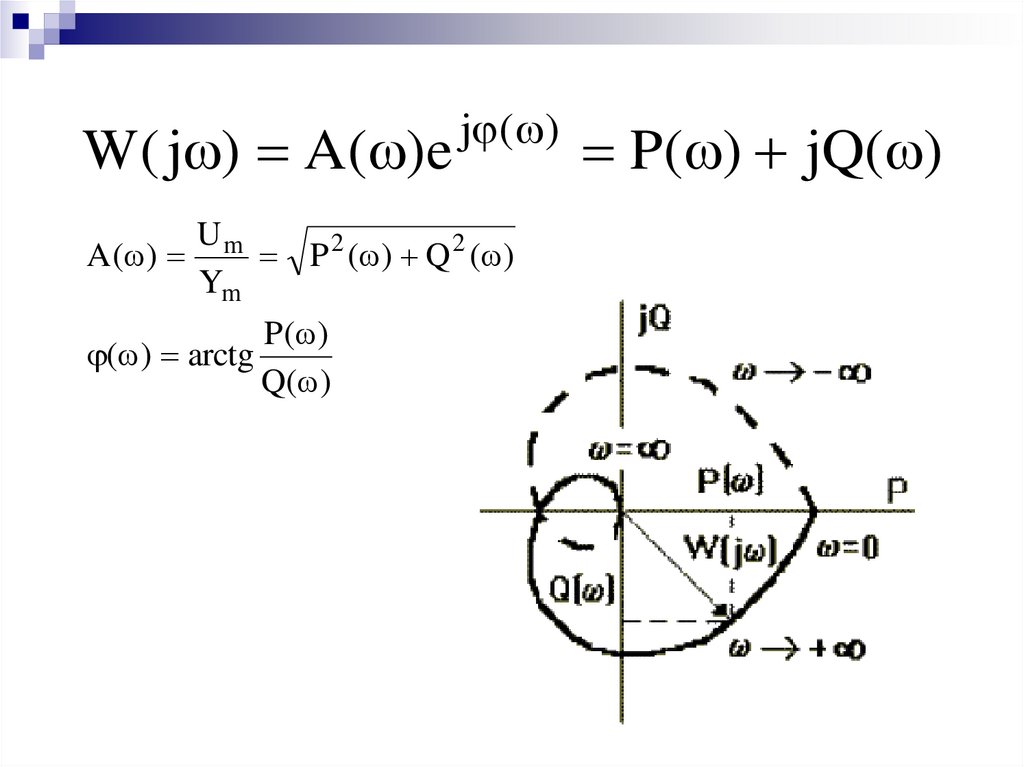
16.
W ( j ) A( )eA( )
j ( )
Um
P 2 ( ) Q 2 ( )
Ym
P( )
( ) arctg
Q( )
P( ) jQ( )
17. Логарифмические частотные характеристики
ln[ W ( j )] ln[ A( )e j ( ) ]ln[ A( )] ln[[ e j ( ) ]
ln[ A( )] ( )
L(ω) = 20lgA(ω)
18. Временные характеристики
1, при t 0;1(t )
0 при t 0.
K (0) n K (p k ) e p k t
h(t)
D(0) k 1 p k D (p k )
19. Элементарные звенья САУ
Wэ (p)b 0 p 2 b1p b 2
a 0 p 2 a1p a 2
20. Пропорциональное звено
Егоуравнение: y(t) = ku(t).
Передаточная функция: W(p) = k.
Переходная характеристика: h(t) = k1(t).
АФЧХ: W(jω) = k.
ВЧХ: P(ω) = k.
МЧХ: Q(ω) = 0.
АЧХ: A(ω) = k.
ФЧХ: φ(ω) = 0.
ЛАЧХ: L(ω) = 20lgk.
21. Интегрирующее звено
Передаточная функция: W(p) = k/p.При k = 1 звено представляет собой
“чистый” интегратор с передаточной
функцией W(p) = 1/p.
АФЧХ: ВЧХ: P(ω) = 0.
МЧХ: Q(ω) = – 1/ω.
АЧХ: A(ω) = 1/ω.
ФЧХ: φ(ω) = – π/2.
ЛАЧХ: L(ω) = 20lg(1/ω) = – 20lg(ω).
t
y( t ) k u ( t )dt
0
t
h ( t ) k 1( t )dt k t
0
22. Апериодическое звено
dyy T
k u
dt
W( j )
P( )
1
1 j T
j T 1 1 ( T) 2
1
1 ( T) 2
A( )
k
W ( p)
Tp 1
Q( )
T
1 ( T) 2
1
1 ( T ) 2
( ) arctg( T)
L( ) 20 lg( A( )) 20 lg( 1 ( T) 2 )
23. Колебательное звено
W ( p)W ( p)
k
T12 p 2 T2 p 1
k
T 2 p 2 2 Tp 1
T2
2T1
24. Дифференцирующее звено
duy( t ) k
dt
W(p) = kp
kTp
W ( p)
Tp 1
АФЧХ: W(j ω )=jk ω;
ВЧХ: P(ω) = 0;
МЧХ: Q(ω) = jkω;
АЧХ: А(ω) = kω;
ФЧХ: φ(ω) = π/2;
ЛАЧХ: L(ω) = 20lgk+20lgω.
25. Структурные схемы. Правила преобразования
Структурной схемой САУ называют графическоеизображение ее математической модели.
Структурная схема САУ в простейшем случае
строится из комбинации элементарных динамических
звеньев, соединенных между собой определенным
образом.
Но несколько элементарных звеньев могут быть
заменены одним звеном со сложной передаточной
функцией.
26. Последовательное соединение
nWэкв Wi
i 1
27. Параллельное соединение
nWэкв Wi
i 1
28. Соединение с обратной связью
WпWэкв
1 Wп Wос
Wэкв
Wп
1 Wос
29. Устойчивость
30. Условие устойчивости
31. Необходимое условие устойчивости
D(p) = aopn + a1pn-1 + a2pn-2 + ... + an = ao(pp1)(p-p2)...(p-pn) = 0,где p1, p2, ..., pn - корни этого уравнения.
ai = -|ai| < 0.
a0 (p + |a1|) (p + |a2| - jω2) (p + |a2| + jω2) ... = 0.
a0 (p + |a1|) ((p + |a2|)2 + (ω2)2) ... = 0
a0 pn + a1 pn-1 + a2 pn-2 + ... + an = 0.
32. Критерий Гурвица
33. Принцип аргумента
ПРИНЦИП АРГУМЕНТАD(p) = a0 (p - p1) (p - p2) ... (p - pn) = 0
pi = αi + jαi = |pi|ejarg(pi)
где arg(pi) = arctg(ωi/ai) + kπ
pi i 2 i 2
34. Принцип аргумента
D(jω) = |D(jω)|ejarg(D(jω)),где |D(jω)| = a0 |jω - p1| |jω - p2|...|jω - pn|,
arg(D(jω)) = arg(jω - p1) + arg(jω - p2) + .. + arg(jω - pn).
D(jω) при изменении ω от -∞ до +∞
n
arg( D( j )) arg( j p i ) (n m) m
i 1
при изменении ω от 0 до +∞ получаем
arg( D( j )) (n 2m)
2
35. Критерий устойчивости Михайлова
D( j ) a 0 ( j ) a1( j )n
n 1
... a n
D( j ) X jY
X a n 2 a n 2 4 a n 4
Y (a n 1 2a n 3 4a n 5
36. Критерий Михайлова
arg( D( j )) n2
37. Критерий Найквиста
W ( p)Wз (p)
1 W ( p)
R( p)
Wз ( p )
Q( p ) R( p )
R ( p)
W (p) W1 W2
Q( p )
Q( p) R ( p)
S(p) 1 W (p)
Q( p )
38. Критерий Найквиста
S( j ) 1 W ( j ) 1 W ( j ) e jArgS ( j )Q( j ) R ( j ) e j 1 ( j )
Q( j ) e
j 2 ( j )
Q( j ) R ( j ) jArgS ( j )
e
Q( j )
ArgS ( j ) 1 ( j ) 2 ( j )
n
1 ( j )
2
39. Критерий Найквиста
2 ( j ) (n 2m)2
n
m
ArgS ( j )
( n 2m) 2
2
2 2