




 Физика
ФизикаПохожие презентации:






")



Основы механики. Кинематика. Тема №1
1. Тема №1 ОСНОВЫ МЕХАНИКИ кинематика
2. 1.1. Модели в механике. Система отсчета. Траектория, длина пути, вектор перемещения
Механика делится на три раздела:1) кинематику;
2) динамику;
3) статику.
Кинематика изучает движение тел, не рассматривая причины,
которые обусловливают это движение.
Динамика изучает законы движения тел и причины, которые
вызывают или изменяют это движение.
Статика изучает законы равновесия системы тел. Если известны
законы движения тел, то из них можно установить и законы
равновесия.
3.
Механика, как наука служит для описания движения тел. Взависимости от условий, обусловленных конкретными задачами
использует разные физические модели. Простейшей моделью
является материальная точка - тело, обладающее массой,
размерами которого, в данной задаче можно пренебречь.
Совокупность нескольких тел можно представить системой
материальных точек.
Под воздействием тел друг на друга тела могут деформироваться,
т. е. изменять свою форму и размеры. Поэтому в механике
вводится еще одна модель - абсолютно твердое тело. Абсолютно
твердым телом называется тело, которое ни при каких условиях
не может деформироваться и при всех условиях расстояние
между двумя точками (или точнее между двумя частицами) этого
тела остается постоянным.
4.
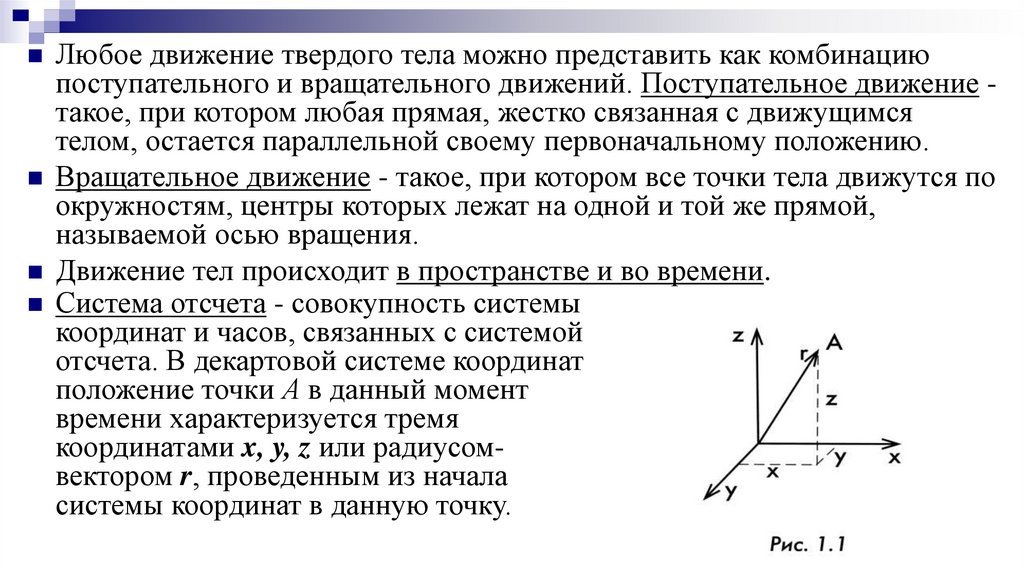
Любое движение твердого тела можно представить как комбинациюпоступательного и вращательного движений. Поступательное движение такое, при котором любая прямая, жестко связанная с движущимся
телом, остается параллельной своему первоначальному положению.
Вращательное движение - такое, при котором все точки тела движутся по
окружностям, центры которых лежат на одной и той же прямой,
называемой осью вращения.
Движение тел происходит в пространстве и во времени.
Система отсчета - совокупность системы
координат и часов, связанных с системой
отсчета. В декартовой системе координат
положение точки А в данный момент
времени характеризуется тремя
координатами x, y, z или радиусомвектором r, проведенным из начала
системы координат в данную точку.
5. 1.2. Скорость
При движении материальной точки ее координаты с течением времениизменяются. В общем случае ее движение определяется скалярными
уравнениями
x = x(t), у = y(t), z = z(t),
(1.1)
эквивалентными векторному уравнению
r = r(t).
(1.2)
Уравнения (1.1) и (1.2) называются кинематическими уравнениями
движения материальной точки.
1.2. Скорость
Для характеристики движения материальной точки вводится векторная
величина — скорость, которая определяется как быстрота движения и
его направление в данный момент времени.
6.
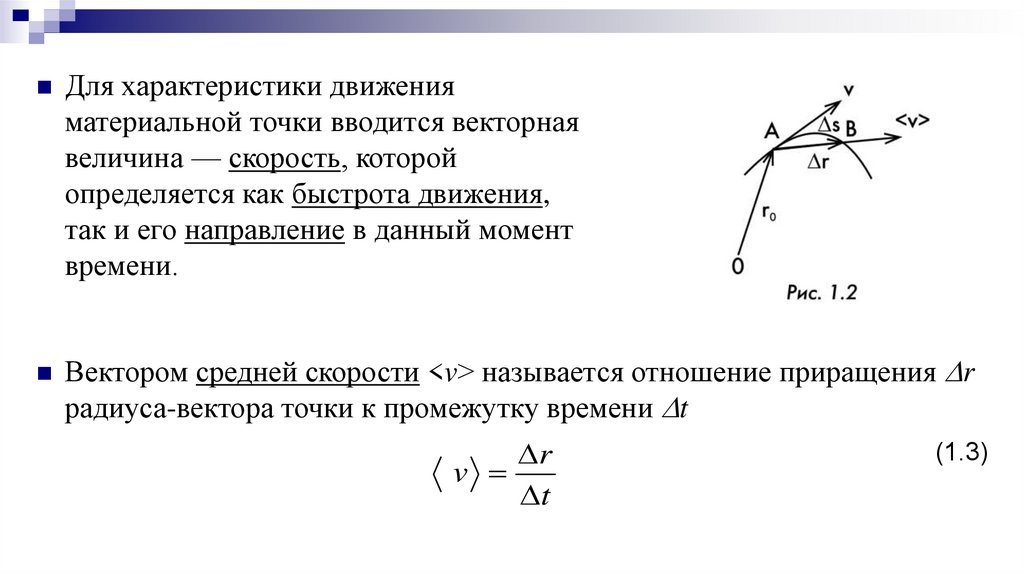
Для характеристики движенияматериальной точки вводится векторная
величина — скорость, которой
определяется как быстрота движения,
так и его направление в данный момент
времени.
Вектором средней скорости <v> называется отношение приращения Dr
радиуса-вектора точки к промежутку времени Dt
Dr
v
Dt
(1.3)
7.
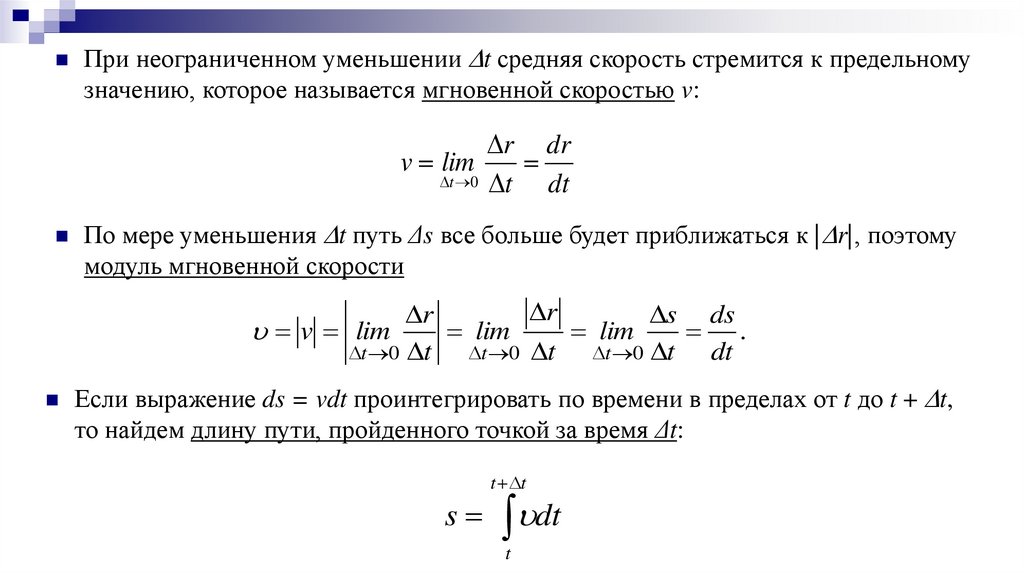
При неограниченном уменьшении Dt средняя скорость стремится к предельномузначению, которое называется мгновенной скоростью v:
Dr dr
v lim
Dt 0 Dt
dt
По мере уменьшения Dt путь Δs все больше будет приближаться к |Dr|, поэтому
модуль мгновенной скорости
Dr
Dr
Ds ds
v lim
lim
lim
.
Dt 0 Dt
Dt 0 Dt
Dt 0 Dt
dt
Если выражение ds = vdt проинтегрировать по времени в пределах от t до t + Dt,
то найдем длину пути, пройденного точкой за время Δt:
t Dt
s
dt
t
8. 1.3. Ускорение и его составляющие
Средним ускорением неравномерного движения в интервале от t до t+Dtназывается векторная величина, равная отношению изменения скорости
Dv к интервалу времени Dt:
<a> = Dv /Dt.
Мгновенным ускорением а материальной точки в момент времени t
будет предел среднего ускорения:
Dv dv
a lim a lim
.
Dt 0
Dt 0 Dt
dt
Таким образом, ускорение а есть векторная величина, равная первой
производной скорости по времени.
9.
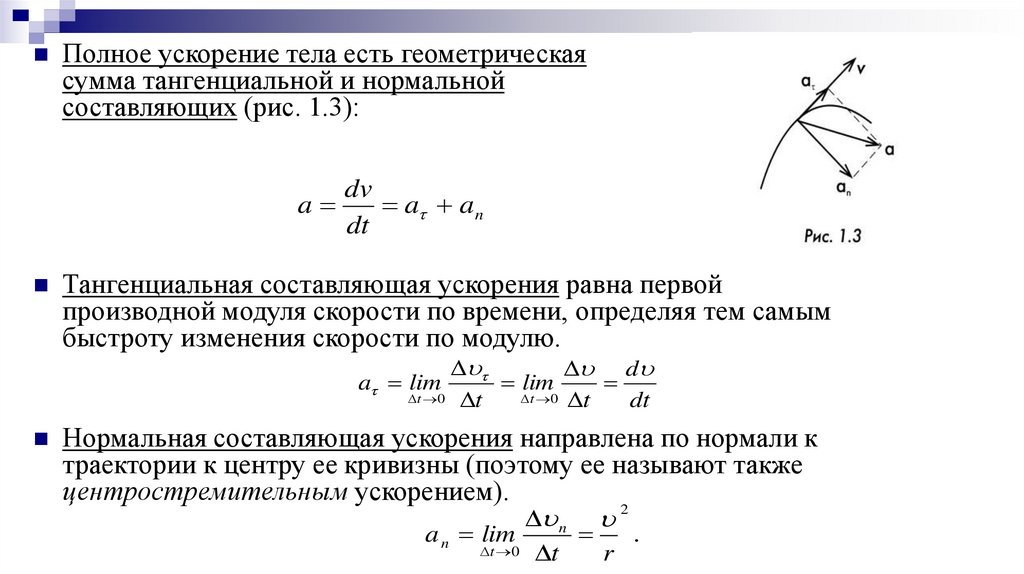
Полное ускорение тела есть геометрическаясумма тангенциальной и нормальной
составляющих (рис. 1.3):
dv
a
a a n
dt
Тангенциальная составляющая ускорения равна первой
производной модуля скорости по времени, определяя тем самым
быстроту изменения скорости по модулю.
D
D d
lim
Dt 0 Dt
Dt 0 Dt
dt
a lim
Нормальная составляющая ускорения направлена по нормали к
траектории к центру ее кривизны (поэтому ее называют также
центростремительным ускорением).
D n
a n lim
.
Dt 0 Dt
r
2
10. 1.4. Угловая скорость и угловое ускорение
Пусть некоторая точка движется по окружности радиуса R. Ееположение через промежуток времени Dt зададим углом D .
Угловой скоростью называется векторная величина, равная первой
производной угла поворота тела по времени:
D d
lim
.
Dt 0 Dt
dt
Линейная скорость точки связана с угловой скоростью
соотношением:
v = R·
11.
Если = const, то вращение равномерное и его можно характеризоватьпериодом вращения Т - временем, за которое точка совершает один полный
оборот, т. е. поворачивается на угол 2 :
Т = 2 / .
Число полных оборотов, совершаемых телом при равномерном его движении
по окружности, в единицу времени называется частотой вращения.
n = 1/T = /2 .
Таким образом:
= 2 n.
Угловым ускорением называется векторная величина, равная первой
производной угловой скорости по времени:
d
.
dt
При вращении тела вокруг неподвижной оси вектор углового ускорения
направлен вдоль оси вращения в сторону вектора элементарного приращения
угловой скорости.
12.
Тангенциальная составляющая ускоренияat = dv/dt = d( R)/dt =R·d /dt = Re.
Нормальная составляющая ускорения
2 2R2
an
2R
R
R
Таким образом, связь между линейными (длина пути s, пройденного точкой по
дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение аt
, нормальное ускорение аn) и угловыми величинами (угол поворота D , угловая
скорость , угловое ускорение e) выражается следующими формулами:
s R , R , a R , an 2 R.
В случае равнопеременного движения точки по окружности (e = const)
0 t , t t 2 / 2,
0
где 0 — начальная угловая скорость.