














































")

 или аналитические сети")
 или аналитические сети")















 География
ГеографияПохожие презентации:




")
. Тема 2.3")




Фотограмметрия и дистанционное зондирование
1.
Фотограмметрия идистанционное зондирование
Кафедра
“Геоэкология и инженерная геология”
2013 – 14 уч. год
Доц. Глухов А.Т.
2. Содержание курса
Ведение.Применение фотограмметрии и дистанционного
зондирования местности для землеустройства и
формирования земельного кадастра.
Общие понятия о фотограмметрии и дистанционном
зондировании.
Геометрические основы фотограмметрии. Свойства
аэрофотоснимков.
Дешифрирование аэроснимков.
Трансформирование аэроснимков
Фотограмметрическая обработка аэроснимков.
Планово-высотное обоснование аэроснимков.
Применение электронной геодезической техники и
спутниковые методы геодезических измерений.
Методы цифровой фотограмметрии.
Методы дистанционного зондирования местности.
3. Литература
Основная
Назаров, А.С. Фотограмметрия: пособие для студентов вузов / А.С. Назаров.
– 2-е изд., перераб. и доп. – Минск : ТетраСистемс, 2010. 400 с.
Назаров, А.С. Фотограмметрия. Минск : ТетраСистемс, 2006. 330 с.
Назаров, А.С. Средства получения цифровых снимков и методы их
фотограмметрической обработки. Минск : ТетраСистемс, 2009. 99 с.
Глухов, А.Т. Дороги, улицы и транспорт города: мониторинг, экология,
землеустройство: учебное пособие // А.Т. Глухов, А.Н. Васильев, О.А. Гусева;
ФГОУ ВПО “Саратовский ГТУ им. Ю.А. Гагарина”. – Саратов, 2015. – 320 с.
Дополнительная
Новаковский, Б.А. Фотограмметрия и дистанционные методы изучения
Земли. М., МГУ, 1997. 204 с.
Инструкция по фотограмметрическим работам при создании цифровых
топографических карт и планов. ГКИНП (ГНТА)–02-036-02. — М.: ЦНИИГАиК,
2002. —49 с.
Интернет- ресурс
Михелев Д.Ш. Инженерная геодезия: учебник /Е.Б. Клюшин [и др.]; под
ред. Д.Ш.Михелева, - 9-е изд. стер. – Электронные текстовые данные
–М.: ИЦ «Академия», 2008.
4. Введение
1. Применение фотограмметрии и дистанционного зондированияместности для землеустройства и формирования земельного
кадастра.
В различные периоды решаются следующие задачи:
В период проектирования землеустройства:
1. Сбор исходной картографической информации для решения принципиального
вопроса о размещении на местности объектов землеустройства;
2. Съемочные работы (мониторинг) в крупном масштабе для детального
проектирования землеустройства и иных действий земельного права.
В период выноса на местность землеустроительного проекта:
1. Вынос и закрепление на местности границ землепользования поселений (городской
черты);
2. Контроль планового положений элементов проекта землеустройства.
В период формирования и эксплуатации земельного кадастра:
1. Исполнительная съемка по межевым знакам, закрепляющим на местности границы
землепользования (положение городской черты). Контроль правильности ее положения
и выявления отступлений от проекта;
2. Формирование земельного кадастра территории. Юридическое оформление документов
земельного права.
5. 2. Общие понятия о фотограмметрии и дистанционном зондировании
Фотограмметрия – научная дисциплина, изучающаяспособы определения формы, размеры и
пространственное положение объектов земной
поверхности по их фотографическим и иным
изображениям в заданной системе координат.
Фотограмметрия – греческий : PHOTOGRAMMETRIE:
photos – свет; gramma – запись; metrio – измерение.
Дословный перевод означает “измерение светозаписи”.
Методом фотограмметрии изучаются изображения, полученные с помощью:
1. Аналоговых аэрофотоаппаратов (АФА);
2. Цифровых аэрофотоаппаратов (ЦАФА);
3. Лазерных сканеров (ЛС);
Фотографирование (сканирование) осуществляется:
c самолетов, вертолетов, аэростатов, а также с искусственных спутников
Земли (ИСЗ)
6. Общие понятия фотограмметрии
Методы построения ипреобразования
аналоговых и цифровых
изображений,
основанные на
использовании
одиночного аэроснимка
называют
фотограмметрическими
b
c
d
a
S
dº
aº
cº
bº
A
D
C
B
7. Общие понятия о фотограмметрии
LcL
R
оL aL
cR
оR
aR
Методы
построения и
преобразования
аналоговых и
цифровых
изображений
основанные на
использовании
пары аэроснимков
B
SL
SR
А
О2
О1
Перекрытие изображений
C
называют
стереофотограмметрическими
8. Обратимость фотоизображения
BSR
b
SL2
SL1
AR B C
R
R
L2
L
AL BL CL
AL2 BL2 CL2
A2
B2
C2
A1
B1
C1
1
b
M
B
R
9. Классификация видов съемочных работ для создания планов и карт
Фототопографическая съемкаНаземная
Фототопографическая
съемка
Аэрофототопографическая
съемка
Стереофототопографический
метод
Дифференцированный
способ
Комбинированный
метод
Универсальный
способ
10. Понятие об аэрофотосъемке
Аэрофотосъемка – процесс получения изображений местности сцелью их преобразования в карту или план местности.
Процесс включает:
1. Летно-съемочные работы: разработка полетного задания, проекта
съемки и ее выполнение.
2. Полевые фотолабораторные работы (использование аналоговых
АФА): фотохимическая обработка аэрофильма (негативов),
изготовление (печать) аэрофотоснимков.
3. Полевые фотограмметрические работы: регистрация, приемка и
оценка качества аналоговых снимков; формирование
синтезированных (композитных) панхроматических и цветных
изображений.
11. Принцип аэрофотосъемки
Маршрутная съемка
а)
P
B
б)
Q
Площадная
съемка
в)
Съемка по
криволинейном
у маршруту
12. Схема маршрутной аэросъемки
fkS1
S2
Вх1
S3
Вх2
Hф
Р1
Р2
fk
1
m Hф
Направление
полета
(1)
13. Принцип аналоговой и цифровой аэрофотосъемки
a) Плановаяб) Перспективная
S
S
α ≤ 3°
α > 3°
14. Характеристика аналоговых снимков
Эмульсия480
520
560
Голубой
Зеленый
Желтый
440
Синий
400
Фиолетовый
Цвет
280-360
Ультрафиолетовый
Длина
волны,
нм
Глаз человека
600
640
680
720
Инфракрасный
Красный
Зернистость – видимая прерывистость изображения в зависимости от размеров
светочувствительных зерен;
Разрешающая способность – максимальное число линий на снимке, раздельно
изображенных на расстоянии одного миллиметра: эмульсии - Rэ = 0,25Δ – 0,33Δ.
1
1
1
в сумме
R
Rо б
Rэ
;
Контрастность – способность изображения передавать различия в яркости объектов;
Цветопередача – цветовая чувствительность или избирательное поглощение цветовых
излучений
Оранжевый
760
15. Датчики цифрового изображения
Из физики (квантовой механики) известно, что вструктуре атома любого элемента выделяют три
зоны:
• валентную зону, где размещаются электроны
обладающие энергией и связанные с ядром атома;
• зону проводимости, где размещаются свободные
электроны (отрицательный заряд) и
перемещающиеся в произвольном направлении под
действием электрического поля;
• запрещенную зону, которая свободна от электронов
и является энергетическим барьером.
16. Датчики цифрового изображения ПЗС-элемент – прибор с зарядовой связью
ФотоныМикролинза
Светофильтр
Электрод
Оксид кремния
Канал n-типа
Потенциальная яма
Подложка p-типа
17. Характеристики датчиков цифрового изображения
• квантовая эффективность – отношение числазарегистрированных носителей заряда к числу фотонов,
попавших в светочувствительную область;
• светочувствительность датчика ПЗС;
• светочувствительность матрицы ПЗС – способность
реагировать на оптическое излучение;
• порог светочувствительности – минимальная величина
регистрируемого светового сигнала;
• диапазон динамический – способность потенциальной
ямы удерживать заряд определенного значения или
отношение максимального выходного сигнала к уровню
собственного шума;
• размер матрицы светочувствительных элементов в
мегапикселах.
18. Дистанционное зондирование или лазерное сканирование
19. Аэрофотоаппарат - АФА
1.Корпус6
2. Конус
4
3.Кассета
4.Командный
прибор
3
5.Аэрофотоустановка
6. Воздушный насос
1
5
5
2
20. Результаты аэросъемочных работ
Облако точек воздушногосканирования
Аэроснимок
21. Фрагмент цифрового топографического плана
22. Дистанционное зондирование или лазерное сканирование
Leica GeosystemsФильм. Земельный кадастр
Часть 1: Основы;
Часть 2: Как это работает;
Часть 3: Примеры проектов.
23. Свойства аэроснимков Схема центральной проекции АФА
Картинная поверхность,P-негатив
a b o c
fk
ab a b So fk 1
AB AB SO H m
S
с о
в а
H0
Поверхность
Земли
Картинная поверхность, Pпозитив
Предметная поверхность
C
O
B
A
(3)
24. Свойства аэроснимков Основные точки центральной проекции в теории перспективы
iS
α
P
αc
o
o0
P0
c
αc/2
n
αc/2
90 - αc
V
O
90 - αc/2
C
α
N
v0
J
25. Свойства аэроснимков
P – картинная плоскость, в которой строится изображение объектов (плоскость
аэроснимка);
S – центр проекции (узловая точка объектива);
v0 – главная точка основания картины;
i – главная точка схода;
v0 i – главная вертикаль;
v0 V – проекция главной вертикали;
J – главная точка схода предметной плоскости, точка пересечения линии картинного
горизонта с плоскостью главного вертикала;
So – главная оптическая ось съемочной камеры, проходящая через центр проекции
перпендикулярно картинной плоскости (фокусное расстояние фотокамеры);
o – главная точка картинной плоскости (аэроснимка), точка пересечения оптической оси с
картинной плоскостью;
O – проекция главной точки картинной плоскости (аэроснимка), точка пересечения
оптической оси с предметной плоскостью;
n – точка надира, точка пересечения картинной плоскости с отвесной линией опущенной
из центра проекции;
N – проекция точки надира, точка пересечения предметной плоскости с отвесной линией,
опущенной из центра проекции (SN – высота фотографирования);
αc – угол наклона картинной плоскости (продольный угол наклона снимка), угол
отсчитываемый от оптической оси So до отвесной линии SN;
c – точка нулевых искажений, точка пересечения главной вертикали с биссектрисой угла
наклона картинной плоскости, отсчитываемого в точке S;
C – проекция точки нулевых искажений на картинную плоскость (точка пересечения
проекции главной вертикали с биссектрисой продольного угла наклона аэроснимка.
26. Свойства аэроснимков Завиимости геометрических характеристик в теории перспективы
• So = Soo = fon = f tg αc
oi = f ctg αc
SN = H
ON = H tg αc
SN = f/Cos αc
iv0 = H/ Sin αc
Расстояние от центра
проекции S до главной
точки схода i
f
Si ic
sin c
Расстояние от главной
точки картины o до точки
нулевых искажений с oc
Расстояние от центра
проекции S до точки
схода предметной
поверхности J
Расстояние от точки
нулевых искажений с
до точки основания
картины v0
1 Cos c
c
f tg f
Sin c
2
H
SJ ivo
Sin c
H f
Cv0 cv0
Sin c
27. Свойства аэроснимков Зависимость координат точек местности и координат точек снимка
yxa
ya
o
ха y a f k
Х А YA H ф
x
(4)
fk
a
S
Y
X A xa
A
Hф
YA
X
O
XA
YA y a
Hф
fk
Hф
fk
;
(5)
28. Свойства аэроснимков Влияние рельефа на масштаб изображения
ab
c o
S
fk
1
;
mA
H ф hA
fk
fk
1
;
mB
H ф hB
HB
HO
HC
(6)
fk
1
mC
H ф hC
HA
А
B
C
O
PA
PB
PC
PO
fk
1
m HO h
(7)
29. Влияние рельефа на масштаб изображения
axδh
rh
h
Ho h
ao o
S
fk
HO h
X A xa
;
fk
A
HO h
YA y a
fk
HO
h
O
AO
r
(8)
AX
Δh
(9)
30. Влияние продольного угла наклона на масштаб изображения
аr2
Sin Sin
fk
α
o
fk
δα
S
о
о′
а
α
Hф
A
O
a
φ
r
Направление
полета
α
31. Элементы ориентирования снимков
Направлениеполета
Z
Y
Z
XSЛ, YSЛ, HSЛ, αл, ωл, ηл
XSП, YSП, HSП, αп, ωп, ηп
SП
B
Z
SЛ
Y
BХ
BZ
γв
γг
(12)
XSЛ, YSЛ, HSЛ, αл, ωл, ηл,
BY
X
ΔX, ΔY, ΔH, Δα, Δω, Δη,
(13)
где
ΔX = Bx = B Cos γв Cos γг
X
ΔY = By = B Cos γв Sin γг
ΔH = Bz = B Sin γв
(14)
32. Определение элементов ориентирования снимков
fkЛ
(q4 q6 )
2by
fk
П
(q3 q5 )
2by
Стандартное расположение
точек стереопары
y
L
y
*3
*4
*1
*2
*5
*6
*3
x
*1
*5
*4
*2
*6
Δα = αЛ - αП
R
x
(15)
(16)
(17)
Л П
(18)
fk
(q3 q 4 q5 q 6 )
2
4y
fk
Л П
b
(19)
33. 3. Дешифрирование аэроснимков
34. 4. Фотограмметрическая обработка аэроснимков Схема бинокулярного зрения
СJ
С
0
А
рj = 0,
А
рА = J1а1 – J2а2,
S2
в
S1
+
А > 0 > С
с1 J1 а1
+
с2
а2
J2
рС = J1c1 – J2c2
35. Аэронивелирование
h H1 H 2 H HТраектория
полета самолета
Изобарическая
поверхность
(2)
S2
ΔH
бH
S1
H2
H1
Поверхность земли
2
h
1
А1
Уровень моря
А2
36. Фотограмметрическая обработка аэроснимков Определение превышений
BS1
fk
o1
Направление полета
S2
a1
a2
a0
o2
a0'
H
A
Территория местности
h
O1
A2
A0
A1
O2
Т
A A H
B
H h
h 1 2
A1 A2
h
B A1 A2
(20)
37. Определение превышений по аэроснимкам
BH h
A1 A2
h
h
A1 A2 H
B A1 A2
(20)
H
H
H
о
о
(хл – хп ) = fk P0
(a0 o1 + a0'o2) =
В = А0 О1 + А0О2 =
fk
fk
A0 A2
A A
H
0 1
a0 a 2
a0 a1
fk
A1A2 = A0A2 + A0A1 =
Р0 = хло – хпо = B
H
а
а
о
о
fk (xл – хп – хл + хп )
Ра = xла – хпа
B
H
P0 ;
fk
H
H
A1 A2 ( Pa P0 ) P
fk
fk
P H
h
P0 P
(21)
38. Принцип измерения параллаксов и превышений
Левыйглаз
ал вл
вп
В
Sл
L
oл а л
вл
А
ап
Sп
ап вп оп
γA
Правый
глаз
R
γB
В
А-В - стереомодель
39. Принцип измерения параллаксов и превышений
Винтпродольных
параллаксов
ха
*а
L
ол
-хап
Y
л
оп*
b
Винт совместного перемещения
кареток вдоль оси Х.
*а
R
оп
*ол
хоп
Ра = хал – хaп
х
Р0 = хол - хоп = b
ΔР = Ра – Р0
40. Нивелирование по аэроснимкам
№1№2
№3
y
y
x
№4
y
x
y
x
x
41. Журнал нивелирования по аэроснимкам
№№ПП
Пикет
ПК +
Отсчеты по винту
параллаксов, мм
Р1
Р2
Рср
Разность
паралла
ксов
Превышения Отметки
ΔР = Pср(i) - Pср(ц),
мм
h, м
А, м
Стереопара: снимки №_____, ______; b = 61,0 мм; Н = 1156 м; Ац = 145.31 м.
Центр
правого
снимка
61,1
60,8
60,95
0,0
1
ПК 0
62,3
62,4
62,35
+1,40
+25.9
2
ПК 1
62,7
62,9
62,8
+1,85
+34.0
3
ПК 2
62,5
62,8
62,65
+1,70
+31.3
Исходный
Pср = (P1 + P2)/2
ΔР = Pср(i) - Pср(ц),
h
Ai = Aц + h
P H
b P
42. Трансформирование аэроснимков
Трансформирование - преобразование центральной перспективной (α >3°) проекции снимков в их плановое положение (α = 0°)
• Способы nрансформирования:
1. Аналитический: по формулам при измерении координат и
параллаксов на стереокомпараторе;
2. Фотомеханический: на приборах – фототрансформаторах с
получением трансформированных снимков;
3. Оптико-графический: на приборах – фототрансформаторах с
перерисовкой изображений в ручном режиме;
4. Дифференциальный: (фотомеханический) с учетом высоты
рельефа;
5. Цифровой: комбинация аналитического и фотомеханического
способов при использовании компьютерной техники.
43. Трансформирование аэроснимков
• Аналитическое трансформирование по формулам приизмерении координат и параллаксов на
стереокомпараторе:
X
A1 x A2 y A3
;
C1 x C 2 y 1
где A1
Y
B1 x B2 y B3
C1 x C 2 y 1 (22)
a H
a1 H
a H
; A2 2
; A3 3
;
c3 f
c3 f
c3
b3 H
b1 H
b2 H
B1
; B2
; B3
;
c3 f
c3 f
c3
c1
c2
C1
; C2
c3 f
c3 f
44. Определение направляющих косинусов
В формулах (22) коэффициенты α1, α2, α3, b1, b2, b3, c1, c2, c3 называютнаправляющими косинусами. Вычисляют по формулам:
a1 Cosα Cosη - Sinα Sin Sin ;
b1 Cos Sin ;
a 2 Cosα Cosη - Sinα Sin Cos ; b2 Cos Cos ;
a3 Sin Cos ;
(23)
b3 Sin ;
c1 Sinα Cosη Cosα Sin Sin ;
c 2 Sinα Sinη - Cosα Sin Cos ;
c3 Cos Cos .
где α, , η – угловые элементы ориентирования снимков.
Устанавливают по формулам (15) – (19).
45. Трансформирование аэроснимков
2. Фотомеханический: на приборах – фототрансформаторах сполучением трансформированных снимков;
2.1. Оптическое условие трансформирования
α
c
1 1 1
F D d
b
d
2.2. Геометрическое условие
трансформирования:
Соответствие координат картинной
и предметной плоскостей
d0
b0
c0
α0
xa ≡ Xa0;
ya ≡ Ya0
xb ≡ Xb0;
yb ≡ Yb0
xc ≡ Xc0;
yc ≡ Yc0
xd ≡ Xd0;
yd ≡ Yd0
46. Трансформирование аэроснимков
3. Оптико-графический: на приборах –фототрансформаторах с
перерисовкой
изображений в ручном режиме;
4. Дифференциальный: (фотомеханический) с
учетом высоты рельефа;
5. Цифровой: комбинация аналитического и
фотомеханического способов при использовании
компьютерной техники.
47. 5. Планово-высотное обоснование или привязка аэроснимков Выбор на местности местоположения опознаков
yНаправление маршрутной съемки
*3 *4
*1 *2
*5 *6
y
*3 *4
x
x
*1 *2
*5 *6
Промежуточный маршрут
y
*3 *4
Заключительный маршрут
*1 *2
*5 *6
x
48. Конструкция опознаков
Вид с самолетаВид в разрезе
На снимке
0,2 мм
На снимке
0,2 мм
На снимке
0,2 мм
5 – 10 м
На снимке
0,2 мм
Скважина
Обсадная труба, d
100-150 мм
Труба d = 50–70 мм
Материковый грунт
Бетонный башмак
49. Теодолитные хода повышенной точности (полигонометрия)
Направление на северТеодолитные хода повышенной точности
(полигонометрия)
X
3
В
βB
dB1
d3n
d23
1
β3
d12
β1
n
dnC
2
β2
βn
А
f ф i ( к н 180 n)
f доп t m n
v
D
X
f
n
С β
C
ΔXi = di*Cos βi
Xi+1 = Xi + ΔXi
ΔYi = di*Sin βi
Yi+1 = Yi + ΔYi
fx ( X ) ( X X ),
ф
к
н
fy ( Y ) (Y Y ),
ф
к
н
f f f , f
2
абс
x
2
y
отн
f
абс
d
, f
i
отн( доп)
1
.
5000
50. Нивелирование опознаков
f h hi ( Aк Aн ),f h(доп) E L
hB1
ВА
AB = AH
fh
Vh
n
3
1
h12
h23
h3n
2
hnC
n
Ai+1 = Ai + hi
СА
AC = A K
51. Триангуляция (трилатерация) или аналитические сети
Направление на северА
Триангуляция (трилатерация) или
аналитические сети
X
X
В
dB1
βB2
β12
βB1 d
dAB
βA1
1
dA2
B2
β21
1
2
β22
β1
d13
β23
2
3
β1
β3
d14
d12
5 d4n
4
d AB
d A2
d B2
Sin 21 Sin B1 Sin A1
βD
7
dnC
β4
4
βn
βC
6
β4
β4
Для треугольника 1
βn
D
dnD
n
βn
β3
β4
3
d24
d3n
βC
d4C
С
Y
52. Триангуляция (трилатерация) или аналитические сети
Уравнивание углов втреугольниках
Вычисление приращений
координат
3
ΔXi = di*Cos βi
Xi+1 = Xi + ΔXi
ΔYi = di*Sin βi
Yi+1 = Yi + ΔYi
f ( j ) ф j 180
1
f доп t m n
v
f
Вычисление координат
Уравнивание приращений
координат
3
f (i) x Xj
Vxj
f (i) x d (i) j
3
dj
1
n
1
3
f (i) y Yj
Vyj
f (i ) y d (i ) j
1
3
dj
1
f абс
fx fy ,
2
2
f отн
f абс
,
d
i
f отн( доп)
1
.
5000
53. Обратная засечка
XcDXY
Yc
γB
γА
Y A PA YD PD YB PB
PA PD PB
С
γD
ВXY
АXY
X A PA X D PD X B PB
;
PA PD PB
1
PA
;
ctgA ctg A
1
PD
;
ctgD ctg D
1
PB
ctgB ctg B
54. Фототриангуляция
№1№2
y
y
*41
*31
*11
*21
*51
*61
*32
x
y
*42
*12
*22
*52
*62
№4
№3
*43
x
y
*33
x
*23
*13
*63
*53
XSЛ, YSЛ, HSЛ, αл, ωл, ηл,
x
(13)
ΔX, ΔY, ΔH, Δα, Δω, Δη,
Y
где
Z
X
ΔX = Bx = B Cos γв Cos γг
ΔY = By = B Cos γв Sin γг
ΔH = Bz = B Sin γв
(14)
55. Фототриангуляция
fkЛ
(q4 q6 )
2by
fk
П
(q3 q5 )
2by
(15)
Δα = αЛ - αП
(16)
(17)
Л П
fk
(q3 q 4 q5 q 6 )
2
4y
fk
Л П
b
(18)
(19)
56. 6. Применение электронной геодезической техники и спутниковые методы геодезических измерений
57.
Привязка снимков электроннымтеодолитом
Режим прямой геодезической задачи
С
di = Di Cos νi;
αi+1 = αi + βправ – 180°;
Xi+1 = Xi + di * Cos αi+1;
Yi+1 = Yi + di * Sin αi+1;
Hi+1 = Hi + Di*Sin νi + ii – li+1,
С
D
В(x,y)
αн
А
2
βВ
d23
dB1 d
12
1
β1
αк
n
β2
d3n
dnC
3
βn
β3
C(x,y)
βC
58.
Привязка снимков электроннымтеодолитом
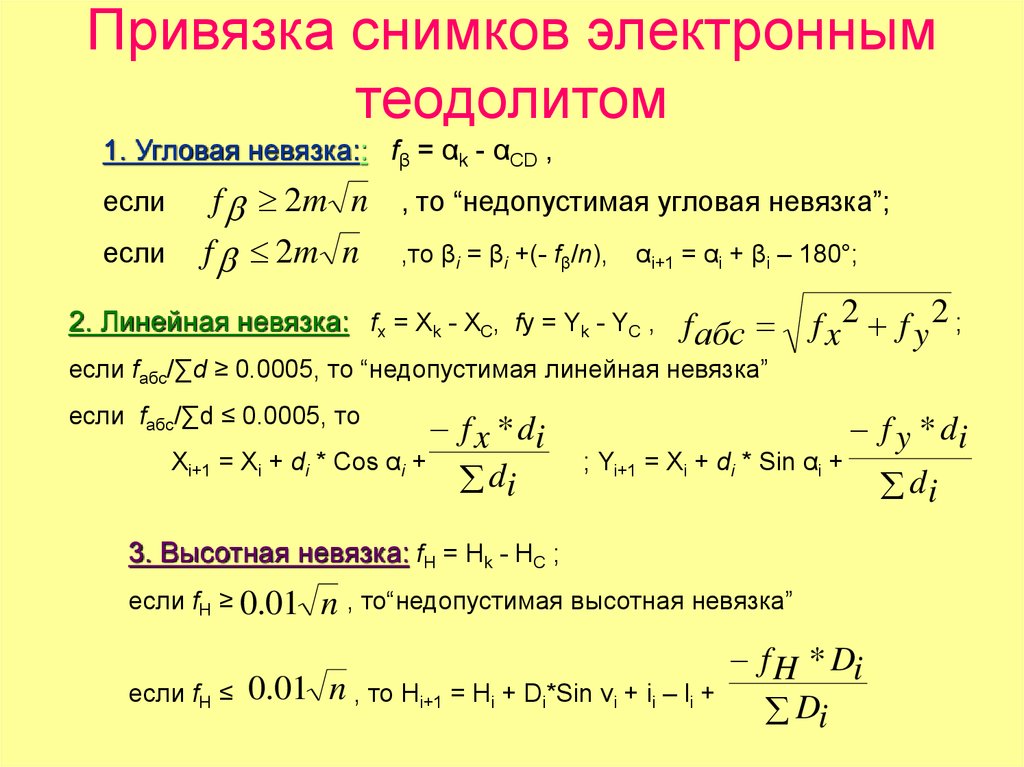
1. Угловая невязка:: fβ = αk - αCD ,
если
если
f 2m n , то “недопустимая угловая невязка”;
f 2m n ,то βi = βi +(- fβ/n), αi+1 = αi + βi – 180°;
2. Линейная невязка: fx = Xk - XС, fy = Yk - YC , f абс
f x2 f y 2 ;
если fабс/∑d ≥ 0.0005, то “недопустимая линейная невязка”
если fабс/∑d ≤ 0.0005, то
f x * di
Xi+1 = Xi + di * Cos αi +
di
f y * di
; Yi+1 = Xi + di * Sin αi +
di
3. Высотная невязка: fH = Hk - HC ;
если fH ≥ 0.01
если fH ≤
n , то“недопустимая высотная невязка”
0.01 n , то Hi+1 = Hi + Di*Sin νi + ii – li +
f H * Di
Di
59. Спутниковые методы привязки снимков
1. ГЛОНАСС – ГЛОбальная НАвигационная СпутниковаяСистема;
2. NAVSTAR – GPS – NAVigation Sistem with Time And
Rangiring – Global Positioning System (Навигационная
система определения расстояний и времени – глобальная
позиционирования система).
Состоят из трех сегментов:
космического, контроля и управления, сегмент пользователя
60. Космический сегмент
ГЛОНАСС – ГЛОбальнаяНАвигационная Спутниковая
Система
24 спутника на 3-х
орбитальных плоскостях.
Расстояние от поверхности
Земли 20 180 км;
От центра Земли 26 600 км
61. Космический сегмент
NAVSTAR – GPS – NAVigationSistem with Time And
Rangiring – Global
Positioning System
(Навигационная система
определения расстояний и
времени – глобальная
позиционирования
система).
21 рабочий и 3 запасных
спутника на 6-и
орбитальных плоскостях.
Расстояние от поверхности
Земли 20 180 км;
От центра Земли 26 600 км
2
7
12
5
15
18
4
19
10
16
21
20
8
9
3
17
14
1
6
11
13
62. Сегмент контроля и управления
ГЛОНАСС – ГЛОбальная
НАвигационная Спутниковая
Система
ЦУС - центр управления системой;
ЦС – центральный синхронизатор;
КС – контрольная станция;
СКФ – система контроля фаз;
КОС – квантово-оптическая станция;
АКП – аппаратура контроля параметров;
КСС – контрольная станция слежения.
NAVSTAR – GPS – NAVigation Sistem
with Time And Rangiring – Global
Positioning System
Станции слежения;
Главные станции контроля;
Kwaiatein
Наземные антены.
ПетропавловскКамчатский
С.-Петербург
Воркута
Москва
Енисейск
Якутск
Улан-Уде
Уссурийск
Kolorado Springs
Hawait
Ascencton
Diego
Garsia
63. Сегмент контроля и управления
Станцияслежения
Главная станция
контроля
Контроль
траектории
движения и
часов спутника
Прогноз эфемерид
и ухода часов
спутника,
формирование
навигационного
сообщения
Наземная
передающая
антена
Передача
навигационного
сообщения на
спутник
64. Сегмент пользователя Структурная схема приемника
41. Антенна
и
предусилитель
Кодовое
разделение
сигналов
5.
Кварцевый
генератор
8.
Блок
питания
6.
3.
Частотное
разделение
сигналов
Микропроцессор
Сигнальный
процессор
Память
2
Дисплей и
панель
управления
7.
Внешний
накопитель
информации
65. Сегмент пользователя Структурная схема приемника
1. Антена с предусилителем;2. Идентификатор сигралов и распределение частот по
каналам;
3. Микропроцессор для управления работой приемника;
4. Расшифровка принятой информации, вычисление
абсолютных координат и поправок в часы приемника,
выполнение фазовых измерений;
5. Стабильный кварцевый генератор;
6. Дисплей и панель управления;
7. Блок памяти для записи и хранения информации;
8. Блок питания.
66. Сегмент пользователя
• Классификация приемников по кодировке сигнала:C/A код;
C/A код + фазовые измерения на частоте L1;
C/A код + фазовые измерения на частотах L1 и L2;
C/A код + P-код + фазовые измерения на частотах L1 и L2;
Определение расстояний и координат приемника
Псевдодальность равна
D' = (TП – ТС) v ;
Расстояние между спутником и приемником равно:
D + δtv = (TП – ТС) v;
ИЛИ
( XC X П )2 (YC - YП)2 (ZC - ZП)2 tv (TП -ТС )v
67. Сегмент пользователя
• Режимы наблюдений:Статика;
Быстрая статика;
Кинематика;
Кинематика “в полете”;
Кинематика в реальном времени.
• Преобразование координат:
XR = Xr(1+μ) – Zrωy + Yr ωz + ΔX0;
YR = Yr(1+μ) – Zrωx + Xr ωz + ΔY0;
ZR = Zr(1+μ) – Yrωx + Xr ωy + ΔZ0;