





: Принцип устройства")
")
")
















")















































 География
География Промышленность
Промышленность Строительство
СтроительствоПохожие презентации:




")





Геодезия. Задачи геодезии в разных циклах строительного производства
1. ГЕОДЕЗИЯ
КафедраГеоэкология и инженерная геология
2015 – 16 уч. год
Доц. А.Т.Глухов
2. ЛИТЕРАТУРА
Инженерная геодезия: учебник для студ. высш. учеб. заведений /
Е.Б. Клюшин, М.И. Киселев, Д.Ш. Михелев, В.Д. Фельдман; под ред.
Д.Ш. Михелева. – 8-е изд., стер. – М.: Изд. Центр “Академия”, 2008.
– 480 с.
Федотов Г.А. Инженерная геодезия: учебник / Г.А. Федотов. – 4-е
изд. стер. – М.: Высш. шк., 2007. – 463 с.
Сборник задач и упражнений по геоинформатике: учеб. пособие /
Е.Г. Капралов, и др.; под ред. В.С. Тикунова. – 2-е изд. Перераб и
доп. – М.: Академия, 2009. – 512 с.
Интернет- ресурс
Михелев Д.Ш. Инженерная геодезия: учебник /Е.Б. Клюшин [и
др.]; под ред. Д.Ш.Михелева, - 9-е изд. стер. – Электронные
текстовые данные –М.: ИЦ «Академия», 2008.
3. ВВЕДЕНИЕ Задачи геодезии в разных циклах строительного производства
В период проектирования:
сбор исходной картографической информации для принципиального
решения вопроса размещения объекта строительства;
съемочные работы в крупном масштабе для детального проектирования
элементов объекта строительства.
В период строительства:
определение местоположения площадки строительства и пространственное
размещение в плане и по высоте элементов запроектированного
сооружения;
геодезическое сопровождение строительства объекта для контроля
правильности возведения конструкции в целом и взаимного расположения
его элементов.
В период эксплуатации:
исполнительная съемка для контроля правильности завершенного
строительства и выявления отступлений от проекта;
геодезические работы по определению эксплуатационных сдвигов объекта в
целом и смещений его элементов для контроля и прогноза устойчивости
конструкции.
4. Угловые измерения
• Единицы измерения углов: Радиан, градус, град.Радиан – угол треугольника, две стороны которого являются
радиусами окружности, а третья сторона криволинейна и равна
радиусу этой же окружности.
R
ρ
R
1 ρ = 180°/π = 57,295577951°
R
1 ρ = 57,295577951*60 = 3437,746770′
1 ρ = 3437,746770′*60 = 206264,80
Градус – угол треугольника, две стороны которого равны радиусу
окружности, а третья криволинейная сторона равна 1/360 длины той
же окружности.
R
R
1°
l = 2πR/360
Град - угол треугольника, две стороны которого равны радиусу окружности, а
третья криволинейная сторона равна 1/400 длины той же окружности.
5. Угловые измерения Принцип измерения горизонтальных и вертикальных углов
ВZ (зенит)
Уровень
лимба
ZB
νB
А
β
ZC
Лимб
В′
С
P
N (надир)
V = 90 – Z
С′
νC
B′AC′ = β – есть
проекция угла ВАС на
горизонтальную
плоскость
Q
VB = 90 – ZB
VC = 90 – ZC
6. Угловые измерения Прибор для измерения горизонтальных и вертикальных углов
Вертикальный кругОтсчетное
устройство
(объектив, окуляр)
Визирная оптическая труба
Горизонтальный круг
(лимб, алидада)
Подставка
Основные части
теодолита 2Т30
7. Угловые измерения Конструкция теодолита (тахеометра): Принцип устройства
2СОсь вращения оптической
зрительной трубы
90
°
Вертикальный круг
Коллимационная
погрешность
Оптический центр
(фокус) объектива
оптической трубы
90°
Сетка нитей
Уровень при
горизонтальном круге
Лимб горизонтального круга
90°
Визирная ось оптической
зрительной трубы
Ось уровня при
горизонтальном круге
Ось вращения теодолита
8. Угловые измерения Поверки теодолита (тахеометра)
90°1. Ось уровня при горизонтальном круге
должна быть перпендикулярна оси
вращения теодолита.
2. Визирная ось оптической зрительной
трубы должна быть перпендикулярна оси
вращения трубы.
90
°
90°
3. Ось вращения оптической зрительной
трубы должна быть перпендикулярна оси
вращения теодолита
Н
δ
α
01 03 2012 г
a 1
H
9. Угловые измерения Поверки теодолита (тахеометра)
Ось вращениятрубы
4. Вертикальная нить сетки нитей
должна быть перпендикулярна а
горизонтальная нить должна быть
параллельна оси вращения трубы
теодолита.
5. Рен. Расстояние между соседними
градусными делениями лимба (а)
должно быть равно расстоянию
между нулевым и шестым штрихом
алидады (b).
90°
Сетка нитей
0
ai = b
159
b
6
а
А
158
V0
4. Место нуля вертикального круга
должно быть равно нулю.
V = V0 ±МО
МО = (КП – КЛ)/2
Горизонтальная
линия
V
+МО
V0
-М0
10. Угловые измерения Способы измерения углов
1.А
От нуля;
0° 00,0′
В
β
С
2.
Приемов;
В
А
β
С
E
3.
А
Круговых приемов
D
4.
Повторений
7,0′
1
°
0
В
С
11. Угловые измерения Точность измерения углов
Погрешность центрированияA1
Погрешность
центрирования
Погрешность редукции
A β
A1
ΔβA = βA1 – βA
B
βA
βB
βB1
ΔβB = βB1 – βB
B1
ΔβC = βC1 – βC
ΔβD = βD1 – βD
βC
βD
D
C
Погрешность
редукции
ΣΔβ = fβ = (βA1 – βA) + (βB1 - βB ) +
+(βC1 - βC)+ (βD1- βD)
fβ = Σβизм – Σβтеор
fβ = Σβизм – 180 (n – 2)
12. Угловые измерения Точность измерения углов
Δβ1, Δβ2, …, Δβnf(x)
или
x1, x2, …, xn
t=1
t = 1,96
-m
x
1
f ( x)
e
m 2
m
-2m
2m
-3m
x x 2
i ср2
2m
3m
t=3
f (доп) t m n
m
( xi xср )
i
n 1
2
13. Линейные измерения
Горизонтальные проложенияA
d
Наклонные
D
B
А
d = D Cos v
v
В
h
d
Вертикальные (отметки,
превышения)
В
H, h, z
h = D tg v
Непосредственные:
• 20-и метровая стальная геодезическая лента;
• Геодезические рулетки (стальные, тесмянные и
пластиковые) с номинальной длиной 5, 10, 20, 30, 50 и 100 м;
• Трос, длиной 100 м;
• 24-х метровые геодезические инварные проволоки.
Косвенные:
• Оптические дальномеры;
• Светодальномеры;
• Лазерные дальномеры.
А
14. Линейные измерения Конструкция мерной ленты
б) Шпилькаа) Начало мерной ленты
1,0
Ручка
3 мм
0,5
Крючок
0,1
1
Штрих начала счета
Отверстия
Заклепка
Заклепка с числом
(количество метров от
начала ленты)
15. Линейные измерения Косвенные. Оптические дальномеры
С постоянным углом и переменнымбазисом, нитяной дальномер
С постоянным базисом и
переменным углом
а
n2
f
v= Const
n1
A
b = Const
D1
B
D2
β1
Дальномерные нити
β2
Поле зрения
оптической
трубы
Так как
d ≡ 1/β, то
A1
а
d2
d1
f D
f
D n k n 100 n
a n
a
если n 100 см, тт D 100 *100 10000 см 100 м.
A
b
d
16. Линейные измерения Косвенные. Светодальномер. Лазерный дальномер
D = Vt/2h′AB
v
l
h′AB = D Sin v
i
hAB = h′AB + i - l
d = D Cos v
А
15 03 2012
В
17. Линейные измерения Компарирование мерных приборов
Компарирование мерного прибора - сопоставление номинальнойдлины прибора или его частей с эталоном.
Мерный прибор
-ΔL
2
+ΔL
1
Эталонное расстояние, L0
-ΔL
2
Мерный прибор
1
+ΔL
18. Линейные измерения
Методика измерения линий 20-и метровой стальной лентой20-и метровая
стальная лента
20-и метровая
стальная лента
D
Lизм
d = Lизм Cos v
D
Lизм = N *[(А- 1) * Lном] + (Lном *n) + D ± [N (A-1) +n] ΔL
19. Линейные измерения Геометрическое нивелирование из середины
h2 = з2 – п2h1 = з1 – п1
2
1
з1
A
п2
з2
п1
h1
B
h2
hAB
X1
hAB = h1 + h2
HA
HB = HA + hAB
Уровень Балтийского моря
HB
20. Линейные измерения Геометрическое нивелирование способом вперед
hАВ = ЗА – ПВГИ = НА + ЗА
HB = HA + hAB
Hпр = ГИ - Пр
ПВ
ПрС
ЗА
А
ПрD
ПрE
С
HA
HС
HD
В
F
E
D
ПрF
HВ
ГИ
HE
Уровень Балтийского моря
HF
21. Линейные измерения Тригонометрическое нивелирование
os vv
n
C
n′ = n
n′
l
n′
D=k
h′
В
v
i
h
d = k n Cos v *Cos v = k n Cos2v
А
h′ = d tg v
h′ = k n Cos2v * tg v
h D Sin 2v.
2
h′ = D Sin v
h = h′ + i - l
22. ФИГУРА ЗЕМЛИ И МЕТОД ПРОЕКЦИЙ
Общая фигура Земли, как планеты. Географическая, геодезическая и
астрономическая системы координат.
Равноугольная поперечно-цилиндрическая проекция Земной
поверхности (проекция Гаусса-Крюгера).
Плоская прямоугольная зональная система координат.
Ориентирование линий на Земной поверхности. Истинный и
магнитный азимут, дирекционный угол, румб.
Склонение магнитной стрелки. Сближение меридианов. Связь между
истинным и магнитным азимутами, истинным азимутом и
дирекционным углом.
23. ОБЩАЯ ФИГУРА ЗЕМЛИ, КАК ПЛАНЕТЫ
ЭВОЛЮЦИЯ ПРЕДСТАВЛЕНИЯ ЛЮДЕЙО ФОРМЕ ЗЕМЛИ
первое –
второе –
третье –
четвертое –
Плоскость;
Шар;
Эллипсоид вращения;
Геоид
24. ПЛАН И КАРТА
• План – уменьшенное изображение земнойповерхности выполненное в ортогональной
проекции:
без искажения расстояний и углов;
имеет место подобие геометрических фигур;
первое представление людей о форме Земли.
• Карта - уменьшенное изображение земной
поверхности выполненное в специальной
картографической проекции:
искажаются либо расстояния либо углы;
отсутствует подобие геометрических фигур;
второе или третье представление людей о форме Земли.
25. Системы координат
Нормаль к поверхностиэлипсоида
Гринвич
Плоскость нулевого
меридиана
Ось вращения Земли
Рс
А
в
R
а
Плоскость меридиана
проходящего через
заданную точку А
φ
О
λ
Pю
Плоскость экватора
26. РАВНОУГОЛЬНАЯ ПОПЕРЕЧНО-ЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯ ЗЕМНОЙ ПОВЕРХНОСТИ (ПРОЕКЦИЯ ГАУССА-КРЮГЕРА)
РАВНОУГОЛЬНАЯ ПОПЕРЕЧНОЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯЗЕМНОЙ ПОВЕРХНОСТИ
(ПРОЕКЦИЯ ГАУССА-КРЮГЕРА)
27. Проекция Гаусса-Крюгера
ГринвичX
С
Зона 31
Зона 33
Зона 32
φ = 6°
Y
X = 0 км
Y = 0 км
Ю
X′ = 0 км
Y = 500 км
28. Плоская прямоугольная зональная система координат
№ Зоны32
33
31
X′
С
X′
X′
С
34
С
X′
X
X′
С
αАВ
yB
0
3
6
9
12
18
15
24
X = 0 км
Y = 0 км
Y
Экватор
Осевой
меридиан зоны
Ю
Ю
Ю
Ю
yB А
xA
В
xB
Y
X′ = 0 км
Y = 500 км
29. Ориентирование линий на Земной поверхности
Систинным азимутом называют – угол,
образованный северным
направлением истинного меридиана и
заданным направлением.
Отсчитывается по ходу часовой
стрелки в пределах от 0° до 360°.
Измеренные углы от северного
Магнитный
направления магнитной стрелки по
меридиан
ходу часовой стрелки до заданного
направления называют магнитным
азимутом. Диапазон измерений от 0°
до 360°.
Отклонение намагниченной стрелки буссоли
от северного направления истинного
меридиана называют склонение магнитной
стрелки:
Если стрелка отклоняется на запад –
западное склонение;
Если стрелка отклоняется на восток –
восточное склонение;
А
В
D
САD < CВD
См
А
Cг
Истинный
меридиан
D
В
CмАD ≠ CгАD; CмАD ≠ CгАD;
30. Ориентирование линий на Земной поверхности
Магнитный азимут, склонение магнитной стрелкиС
Истинный
меридиан
Аи
А
Аи
АмАВ
АмАВ
Восток
Ю
δЗ
Магнитная
стрелка
δВ
Истинный
меридиан
В
А и = А м + δВ
Аи = А м – δ З
А
Запад
Ю
В
31. Ориентирование линий на Земной поверхности
СX
А
X
В
С
αA
А
D
γв
γз
αА = αВ = αD
αD
αB
В
D
αА = Аи(А) + γз
Y
Y
Осевой
меридиан
Ю
αВ = Аи(В)
αD = Аи(D) - γв
Ю
Аи(А) < Аи(В) < Аи(D)
К понятию дирекционного угла
32. Ориентирование линий на Земной поверхности
Сближение меридиановP
б)
γВ
С
γЗ
а)
С
γ
А
А
α
Аи
Аи
α
В
В
φ
λА
Ю
λВ
Ю
γ = (λВ – λА) Sin φ
Линии касательные к
меридианам на одной и той
же заданной широте φ
33. Ориентирование линий на Земной поверхности Понятие румба
СX+
СЗ
СВ
r
α = 360° - r
Y-
α=r
α
Y+
З
В
α
α = 180° + r
r
α
α = 180° - r
r
ЮЗ
ЮВ
Ю X-
Румбом называют угол < 90°,
отсчитываемый от северного
или южного направления
меридиана до заданного
направления.
Румб имеет наименование:
СВ, ЮВ, ЮЗ, СЗ.
34. Ориентирование линий на Земной поверхности
Истинный меридианЛинии параллельные
осевому меридиану
(линии сетки координат)
Магнитный
меридиан
γ°
δ°
Склонение магнитной
стрелки западное
α°
Сближение меридианов
восточное
АМ
А
АИ
В
35. Съемка территории. Составление плана участка местности
Планово-высотное обоснование• Пункты триангуляции и полигонометрии: точки
обозначенные на местности постоянными
специальными знаками, имеющими надземную и
подземную часть. Для таких точек установлены их
координаты и высоты в единой государственной
системе координат (X, Y, H):
а) на незастроенной территории;
а)
б)
б) заделка в фасаде здания.
• Съемочные точки теодолитных ходов: точки
обозначенные на местности временными знаками X
(деревянные колышки, дюбель в асфальтовом
1
покрытии, местные предметы точечного характера).
76.51
Для таких точек устанавливают их координаты и
высоты (X, Y, H) в процессе съемочных работ.
а
9 КЖ
б
2
4
78.52
77.28
3
79.64 Y
36. Съемка территории. Составление плана участка местности
Полевые работы• Рекогносцировка – осмотр территории съемки;
• Детальная рекогносцировка → закрепление точек временными
знаками (колышки, дюбеля и др.), составление схемы местоположения
точек обоснования;
• Измерение горизонтальных и вертикальных углов между смежными
точками;
• Измерение расстояний между смежными точками;
• Съемка горизонтальной ситуации (теодолитная съемка);
• Геометрическое нивелирование по точкам теодолитного хода;
• Съемка рельефа (нивелирование застроенной территории или
тахеометрическая съемка)
37. Съемка территории. Составление плана участка местности
Схема теодолитного ходаНаправление
на Север
3
X
3
Dср(2-3)
2
Dср(3-4)
4
2
Dср(4-5)
Dср(1-2)
1
1xy
Dср(5-1)
прим
X
αA-1
4
Аxy
5
5
Y
38. Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуации3. Способ
линейной
засечки
9 КЖ
10,0
60,0
12,3
4. Способ
створов
43° 17′
,5
24
18,2
8,0
14,9
4,2
11
,9
4,
7
7,8
154,7
0 00,0
83,6
0
23,5
2
3
337° 50′
88,2
1. Способ
перпендикуляров
2. Способ
полярных
координат
39. Съемка территории. Составление плана участка местности
Способы съемки горизонтальной ситуацииСпособ угловой засечки
0 квт
2
2
=
U
Опора ЛЭП
высокого
напряжения
319° 20′
40° 59′
0 00,0
2
0 00,0
3
40. Съемка территории. Составление плана участка местности
Камеральные работы
Решение обратной геодезической задачи;
Вычисление горизонтальных углов по результатам полевых измерений;
Вычисление горизонтальных проложений между смежными точками;
Вычисления в ведомости координат:
Исходные данные;
Уравнивание горизонтальных углов;
Вычисление дирекционных углов;
Вычисление приращений координат;
Уравнивание приращений координат;
Вычисление координат точек теодолитного хода.
Вычисления в ведомости геометрического нивелирования:
• Исходные данные;
• Уравнивание превышений
• Вычисление отметок точек нивелирного хода.
Вычисления в журнале тахеометрической съемки:
• Исходные данные;
• Вычисление отметок пикетов.
Составление плана ситуации и рельефа:
• Нанесение ситуации;
• Нанесение пикетов и рисовка горизонталей.
41. Съемка территории. Составление плана участка местности
Обратная геодезическая задачаX
1
X1
r = αА1
d
dA1
XА
А
Y
yА
r
Arctg
пред-посл
y1
Y Y
r Arctg 1 A
A1
X X
1
A
(X
посл
X
X
посл
X
пред
2
2
) (Y
Y
)
пред
посл
пред
Знаки приращений
координат
Yпосл– Yпред
Y
Y
посл
пред
Xпосл− Xпред
Наименование
румба
Формула
дирекционного
угла
+
+
СВ
α=r
+
−
ЮВ
α = 180 – r
ЮЗ
α = 180 + r
42. Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.Исходные данные:
1. Измеренные горизонтальные углы; 2. Исходный дирекционный угол;
3. Горизонтальные проложения между смежными точками; 4. Координаты исходных точек.
Уравнивание горизонтальных углов:
В разомкнутом теодолитном ходе
угловая невязка равна:
В замкнутом теодолитном ходе так
как αк = αн, то угловая невязка равна:
Допустимая угловая невязка равна:
Поправки в углы вычисляют по
формуле:
[ к н 180 (n 2)];
i
ф
f
180 (n 2);
i
ф
f
t m n;
доп
f
ф
V
.
n
f
43. Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.Вычисление дирекционных углов
С
Север
С
Север
αпред
αпред
βлев
В
αпосл
βправ
180°
А
посл
пред
180
прав
посл пред 180
лев
D
44. Съемка территории. Составление плана участка местности
Вычисления в ведомости координат.Прямая геодезическая задача
X
B
XB
ΔXAB
ΔXAB = dAB Cos αAB
XA
αAB
A
ΔYAB = dAB Sin αAB
dAB
XB = XA + ΔXAB
ΔYAB
YA
Y
YB
YB = YA + ΔYAB
45. Съемка территории. Составление плана участка местности
Вычисление в ведомости координат.Уравнивание (сторон) приращений координат
fY
X
B
dAB+δd1
∆XAB+δX1
XA
B′
dBC+δd2
∆XBC+δX2
AXY
CXY
XC
∆YAB+δY1
С′
∆YBC+δY2
fX
Y
0
YA
YС
fабс
46. Съемка территории. Составление плана участка местности
Вычисление в ведомости координат.Уравнивание (сторон) приращений координат
(∆XAB+δX1) + (∆XBC+δX2) = XC - XA;
(∆YAB+δY1) + (∆YBC+δY2) = YC - YA.
δX1 + δX2 = (XC - XA) – (∆XAB + ∆XBC)
δY1 + δY2 = (YC - YA) – (∆YAB + ∆YBC)
fx = -∑δX и
Разомкнутый ход:
Замкнутый ход
fy = -∑δY
fx = ∑∆X – (Xк – Xн);
fy = ∑∆Y – (Yк – Yн),
Если Xк = Xн и Yк = Yн,
то
fx = ∑∆X;
fy = ∑∆Y.
47. Съемка территории. Составление плана участка местности
Вычисление в ведомости координат.Уравнивание (сторон) приращений координат
Асолютная погрешность –
f
Допустимая погрешность –
f отн
абс
f
2
x
f абс
n
di
f
2
y
1
2000
i 1
Поправки в приращения координат –
Исправленные приращения координат –
f d
x i
v (i ) n
;
x
d
i 1 i
ΔXиспр = ΔXвыч + vx
ΔXиспр = ΔXвыч + vy
Координаты точек теодолитного хода –
Xпосл = Xпред + ΔXиспр
Yпосл = Yпред + ΔYиспр
f d
y i
v
n
y (i )
d
i 1 i
48. Съемка территории. Составление плана участка местности
Съемка рельефаСъемочное обоснование
Геометрическое нивелирование
Нивелирование
застроенной территории
Тригонометрическое нивелирование
Тахеометрическая съемка
Рисовка рельефа на плане
49.
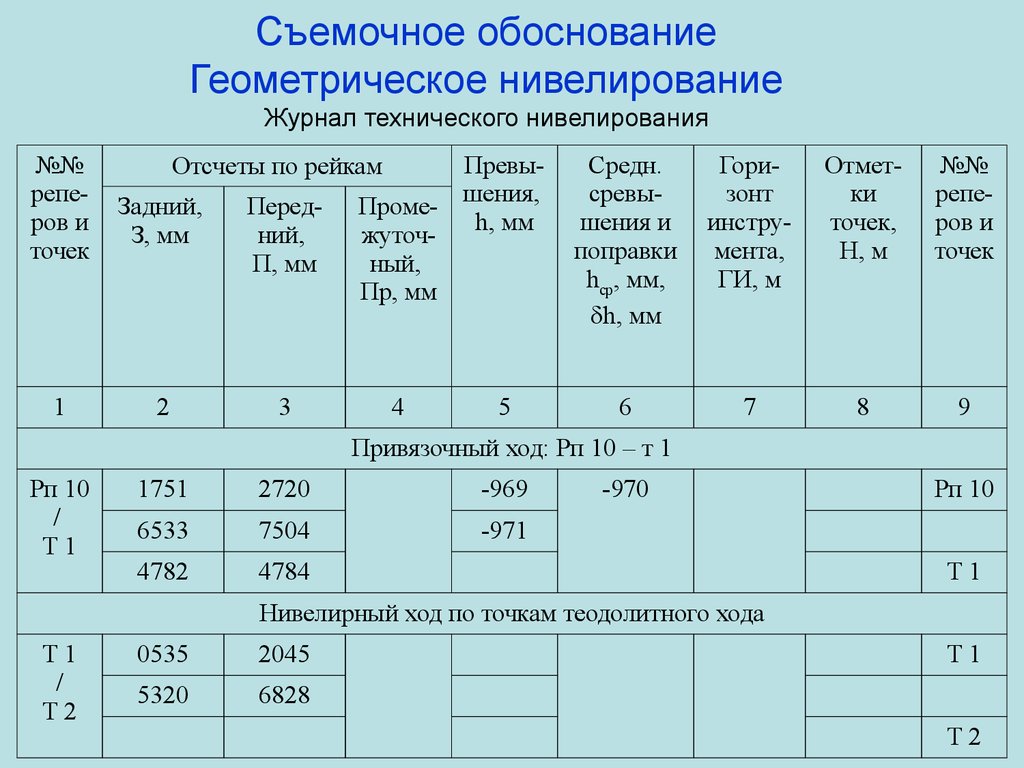
Съемочное обоснованиеГеометрическое нивелирование
Журнал технического нивелирования
№№
реперов и
точек
Задний,
З, мм
Передний,
П, мм
1
2
3
ПревыПроме- шения,
h, мм
жуточный,
Пр, мм
Отсчеты по рейкам
4
5
Средн.
сревышения и
поправки
hср, мм,
h, мм
Горизонт
инструмента,
ГИ, м
Отметки
точек,
H, м
№№
реперов и
точек
6
7
8
9
Привязочный ход: Рп 10 – т 1
Рп 10
/
Т1
1751
2720
-969
6533
7504
-971
4782
4784
-970
Рп 10
Т1
Нивелирный ход по точкам теодолитного хода
Т1
/
Т2
0535
2045
5320
6828
Т1
Т2
50.
Съемочное обоснованиеГеометрическое нивелирование
Журнал технического нивелирования,
окончание
1
2
3
4
5
6
7
8
9
Привязочный ход: Т 5 – Рп 11
Т4
/
Т5
Т5
/
Рп 11
1173
1738
-565
5958
6523
-565
-565
Т4
Т5
2188
1604
+584
6969
6387
+582
+583
Т5
Рп 11
З
П
Постраничный контроль:
h
З - П =
hср =
З П
2
Сумма средних превышений от репера № 10 до репера № 11 → hср =
51. Съемочное обоснование Геометрическое нивелирование Схема нивелирного хода
Т2hср
Т3
hср
hср
Т4
Т1
hср = -565
Т5
hср = - 970
Рп 10
hср = + 583
Рп 11
52. Съемочное обоснование Геометрическое нивелирование Уравнивание превышений
1. Исходные данные:Средние превышения между станциями
Сумма средних превышений
от репера № 10 до репера № 11
→
Отметки Реперов
→
→
2 Вычисления:
Фактической невязки:
hср
hср
Hрп10
Hрп11
f hф= hср – (HK - HH )
f hф= hср – (Hрп11 - Hрп10 )
50 мм L
Допустимой невязки:
fh(доп) =
Поправок в превышения:
δh = - f hф/ n
Исправленных превышений:
hиспр = hср + δh
Отметок точек:
Hi+1 = Hi + hиспр
53. Съемка рельефа Абрис нивелирования застроенной территории
10 КЖ9 КЖ
6
22
24
20
8
25
19
9
X40
41
58
23
21
Т1
7
9 КЖ
26
Ст 1
38
43
37
44
36
27
18
57
42
39
59
56
55
Т2
Ст 2
Тротуар
Газон
54
45
Проезжая часть улицы
10
17
11
16
15
12
13
28
14
29
9 КЖ
35
34
30
33
31
32
46
47
52
51
48
49
53
50
10 КЖ
9 КЖ
54. Съемка рельефа Нивелирование застроенной территории
Журнал нивелирования застроенной территорииОтсчеты по рейкам
ПревыСредн. Горизонт Отметки
№№ Задний, Пере- Промешения,
Сревыш.
инточек,
репе- З, мм
и попр.
струH, м
дний,
жуто h, мм
ров,
hср, мм,
мента,
П, мм
чный,
точек
ГИ, м
Пр, мм
h, мм
и
пикет
1
2
3
Т1
0535
2045
/
5320
6828
X 40
6
7
8
9
…
Нпосл = Нпред + h + h
4
0651
0832
1173
1076
…
55,333 = 56,841 + (-1,509) + 0,001
5
-1510
-1508
6
-1509
+1
7
57,376
8
56,841
№№
реперов,
точек
и
пикет
9
Т1
55,333
X 40
56,725
6
56,544
7
56,203
8
56,300
ГИ = НЗадн + З = 56,841 + 0,535
= 57,3769м
…
…
Нпр = ГИ – Пр = 57,376 – 0,651 = 56,725 м
Нпр = ГИ – Пр = 57,376 – 0,832 = 56,544 м
И так далее
55. Съемочное обоснование Тригонометрическое нивелирование Схема тахеометрического хода
v32v23
Превышения по
2
v34
d23
4
hi,i+1 = di,i+1 tg vi,i+1
v45
d12
Превышения обратные
направлению хода
v12
hi+1,i = di+1,i tg vi+1,i
v43
d34
v21
направлению хода
3
d45
1
v15
d51
v54
v51
5
56. Съемочное обоснование Тригонометрическое нивелирование
Журнал тахеометрической съемкиСтанция № __I__ Отметка, H = __100,00______ Высота инструмента, i = 1.58
Ориентировано (0 00) на станцию № ___V_____ Место нуля вертикального круга МО = 0 00,5
Отсчеты
№
пикета
1
гориз.
круг
дальномеру
D, м
вертик.
круг
КП
КЛ
2
3
4
Высо
-та
навед
.
, м
Угол
наклона
Горизо
нт.
проложение
d, м
Превышения
табл.
h , м
оконч.
h, м
5
6
7
8
9
Отметк
и
H, м
Описание
пикета
10
11
Измерения на смежные станции
II
-
-
0 35.5
3.00
II
-
-
-0 36.5
3.00
V
-
-
-1 08
3.00
V
-
-
+1 07
3.00
-0 36.0
263.02
-2.75
-4.17
+1 07.5
239.14
+4.70
+3.28
Измерения на пикеты при КЛ
1
57 50
111,2
-1 12,0
1,58
-1 11,5
111,1
-2,32
-2,32
97,68
Берег
2
140 05
61,8
+0 11,0
1,58
+0 11,5
61,8
+0,20
+0,20
100,20
Обрыв
3
181 10
66,0
+0 15,0
3,00
+0 15,0
66,0
+0,22
+0,22
100,22
Рельеф
57. Съемочное обоснование Тригонометрическое нивелирование Ведомость увязки превышений тахеометрического хода и вычисление отметок станци
Съемочное обоснованиеТригонометрическое нивелирование
Ведомость увязки превышений тахеометрического хода
и вычисление отметок станций
№№
Станц.
Расст.
d100
Превышения, м
hпр
hобр
hср
Поправ
-ки, vh,
м
Испр.
hиспр, м
I
Отметки,
H, м
№№
Станц.
100,00
I
II
3,00
-4,17
+4,13
-4,15
-0.04
-4.19
95,81
II
III
2,6
-0,30
+0,26
-0,28
-0.02
-0.30
95,51
III
2,4
+0,90
-0,92
+0,91
-0.02
+0.89
2,7
+6,87
-6,92
+6,90
-0.03
+6.87
96,40
IV
1,9
12,6
-3,24
+3,28
∑hср
-3,26
+0,12
-0.01
-0,12
-3.27
0,00
103,27
V
100,00
I
IV
V
I
∑ d100
fh = ∑hср - ∑hтеор = 0,12 – 0 = +0,12;
0,04 d
100 0,04 12.6 0.22 м
f (доп)
n
h
5
f d
v h 100
h
d100
58. Съемка рельефа Абрис тахеометрической съемки
Съемка на станции I12
13
На Т II
16
14
V
15
11
10
3
66.0
I
181 10
8
7
9
6
2
.8
1
6
0 00,0
17
57 50
140 05
111.
2
4
5
Р. Соть
1
59. Съемка рельефа Рисовка рельефа на плане
33,4533,24
33,77
32,17
33,89
31,88
32,19
33,15
34,25
35,77
34,87
34,35
36,45
35,65
36,09
36,59
34,98
33,91
35,97
34,55
37,11
35,18
60. Трассирование и нивелирование Трассирование, Разбивка ключевых точек трассы
Ву 1 ПК 7 + 27,3нт
пк 0
5 6 7
4
3
1 2
β1
При повороте вправо: θ1 = 180° - β1
θ1
При повороте влево: θ2 = β2 - 180°
Ву 2
β2
кт
θ2
61. Трассирование и нивелирование Трассирование, вычисление румбов
Наименование румбаначальной линии
Угол поворота:
± θ вправо, влево.
Формулы для вычислений
СВ
+ θ вправо
ri+1 = ri + θ,
если ri + θ > 90°,то СВ → ЮВ и ri+1 =180 –(ri +θ)
- θ влево
ri+1 = ri - θ,
если ri - θ < 0°, то СВ → СЗ и ri+1 = θ – ri
ЮВ
- θ вправо
ri+1 = ri - θ,
если ri - θ < 0°, то ЮВ → ЮЗ и ri+1 = θ – ri
+ θ влево
ri+1 = ri + θ,
если ri + θ > 90°, то ЮВ → СВ и ri+1 =180 –(ri+θ)
ЮЗ
+ θ вправо
ri+1 = ri + θ,
если ri + θ > 90°, то ЮЗ → СЗ и ri+1 =180– (ri+θ)
- θ влево
ri+1 = ri - θ,
если ri - θ < 0°, то ЮЗ → ЮВ и ri+1 = θ – ri
СЗ
- θ вправо
ri+1 = ri - θ,
если ri - θ < 0°, то СЗ → СВ и ri+1 = θ – ri
+ θ влево
ri+1 = ri + θ,
62. Трассирование и нивелирование Трассирование, вычисление румбов
CC
ri
ri+1
ri
З
C
ri+1
ri+1
θ
В
Ю
θ
θ
ri+1
ri
Ю
θ
C
З
ri
З
В
Ю
В
Ю
63. Трассирование и нивелирование Трассирование и разбивка кривой
Из треугольника НК, ВУ, ОПикетажные наименования
главных точек кривой (НК, КК):
следует, что
Т = R tg (Θ/2)
Т
К = (πR Θ)/180°
Б = R – R/Cos (Θ/2)
Д = 2Т - К
ПК 1
ПК 0
ПК 2
3
К 4
НК
Б
R
R
ПК НК = ПК ВУ – Т
ВУ ПК 4 + 21
Θ
4
Т
5
ПК КК = ПК НК + К
КК
ПК КК = ПК ВУ + Т - Д
6
7
R
Θ/2
8
9
Ψ=Θ
Из четырехугольника НК,ВУ,КК,О
следует, что
О
(180° – Θ) + 90° + 90° + ψ = 360°
Θ=ψ
64. Трассирование и нивелирование Трассирование, вынос пикетов на кривую
К* = ПК 2 – ПК НКВУ ПК 2 + 18,3
ПК
x R Sin
y R R Cos
Б СК
y
x
НК
θ
2
КК
ПК 2
R
К
П
А
1
R
НТ 0
ПК
ψ 180 К *
R
R
R
ψ
О
65. Трассирование и нивелирование Трассирование, ведомость прямых и кривых
Углы№
угл
а
Пк
верны
Угол:
+ право
- лево
Кривые
Прямые
66. Трассирование и нивелирование Нивелирование, продольный профиль
Трассирование и нивелированиеМасштаб
ы
Г 1:5000
В 1:500
5
0
Нивелирование, продольный профиль
1,88
70
65
60
55
50
45
40
35
30
25
20,00
"
"
300
"
"
17
Отметки
ПАШНЯ
"
0"
500
"
"
"
50
200
"
0
0
1
6
2
ЮВ7 27 47
929,86
55
3
8
11
4
9
30 70
40
60
5
10
60,52
39,48
45
Расстояния
29,86
70,14
Отметки земли
по оси трассы
Пикеты
кривые
километры
"
"
55,62
30
"
1,49
57,50
1,73
1,52
7,09
8,23
11,85
11,85
9,46
4,08
0,25
1,37
2,26
2,41
2,55
ПАШНЯ
Уклоны
20
10
15
15
Проектные
данные
Рп 10
р. Сев.
Донец
Развернутый план
трассы
= 18 15 R = 100.00 К = 128,56
Д = 1,25 Б = 1,88
67. Элементы теории погрешностей геодезических измерений
Свойства измеренных величин и свойства погрешностей :вероятнейшие, истинные.
Классификация погрешностей:
По источнику происхождения
Инструментальные
Личные
из Уче
ме т
ре пр
ни и
ях
Юстировка
приборов
По характеру действия
Внешние
факторы
Случайные
Методы
уравнивания
Результат измерения
Систематические
Грубые
ри х
п
т ния
е
Уч ере
м
из
Повторные измерения
68. Элементы теории погрешностей равноточные измерения Распределение вероятностей появления случайных погрешностей
Вероятнейшие погрешностиФормула Бесселя
X1, X2, …, Xn.
Xi
X ср i n
f ( )
δ1 = X1 - Xср,
δ2 = X2 - Xср,
…,
δn = Xn - Xср,.
1
m 2
2
2m 2
e
i 2
m i
n 1
69. Элементы теории погрешностей равноточные измерения Распределение вероятностей появления случайных погрешностей
Истинные погрешностиf1(x), f2(x), …, fn(X).
Формула Гаусса
Δ1 = f1(x) - fт(x),
Δ2 = f2(x) - fт(x),
…,
Δn = f2(x) - fт(x).
f ( )
Δi 2
m in
Δ
1
m 2
2
2m 2
e
70. Элементы теории погрешностей Распределение вероятностей появления случайных погрешностей
f(δ) f(Δ)f ( )
t=1
1
m 2
2
2
2m
e
f ( )
1
m 2
2
2
2m
e
Для 68,3 % от n, δ ≤ 1m или Δ ≤ 1m (t = 1).
t=2
-m
δ,
Δ
m
-2m
2m
-3m
3m
t=3
Для 95,4 % от n, δ ≤ 2m или Δ ≤ 2m (t = 2).
Для 99,7 % от n, δ ≤ 3m или Δ ≤ 3m (t = 3).
Определение доверительной вероятности
и формирование допустимой погрешности,
например,
f (доп) t m n
71. Элементы теории погрешностей Случайные погрешности обладают следующими свойствами:
1.2.
3.
4.
Свойством предельного значения. Абсолютные значения
случайных погрешностей при заданных условиях измерений не
могут превосходить предельного значения. Это предельное
значение является граничным, отделяющим случайные
погрешности от грубых.
Свойством симметрии. Появление отрицательных и
положительных случайных погрешностей равновероятно.
Свойством обратной пропорциональности. Меньшим значениям
случайных погрешностей соответствует большая вероятность их
появления и наоборот, чем больше случайная погрешность, тем
меньше вероятность ее появления.
Свойством компенсации. Среднее арифметическое случайных
погрешностей стремится к нулю при неограниченном увеличении
количества измерений.
i
ср i n 0
при n
или
i
ср i n 0
при n
72. Элементы теории погрешностей Оценка точности измерений
По разностям двойных измерений:d1 = x1 – x2,
d2 = x1 – x2,
…,
di = x1 – x2,
...,
.
dn = x1 – x2,
∑di = ∑(x1– x2)
p
Если ∑d ≡ 0, то
m
d 2
2n
d
-3 m
3m
dср nd 0
Если ∑d ≠ 0, то
dср nd
0
p
Δdi = di - dср
2
d
m
2(n 1)
d
0
dср
dср nd 0
73. Элементы теории погрешностей Оценка точности измерений
Относительная погрешностьf
отн
f
1
абс
d
d
f
абс
1
2000
74. Элементы теории погрешностей неравноточные измерения Оценка точности измерений
Понятие веса измерения:Степень доверия к измеренным параметрам:
Yi Pi
Yсв
Pi
X i Pi
X св
Pi
L1 = 1 км, m1 = 17 мм
1
Н1 = 10,021
Hi Pi
H св
Pi
L3 = 10 км, m3 = 53 мм
3
Н3 = 10,068
L2 = 2 км, m2 = 23 мм
2
P
m2
Н2 = 10,044
P1 = 10/1 = 10
P1 = 532/172 = 10
P2 = 10/2 = 5
P2 = 532/232 = 5
P3 = 10/10 = 1
P3 = 532/532 = 1
10,031
10.031