
Похожие презентации:










Системи комбінаційного керування
1. Системи комбінаційного керування
Приклад 1:У багатьох системах керування
потрібні перетворювачі кодів,
наприклад, у випадку, коли в
окремих частинах даної системи
застосовуються різні коди.
Спроектуйте перетворювач для
заміни двійкового коду з
сигналами а, b, c, d на код Ґрея
з сигналами w, x, y, z.
2.
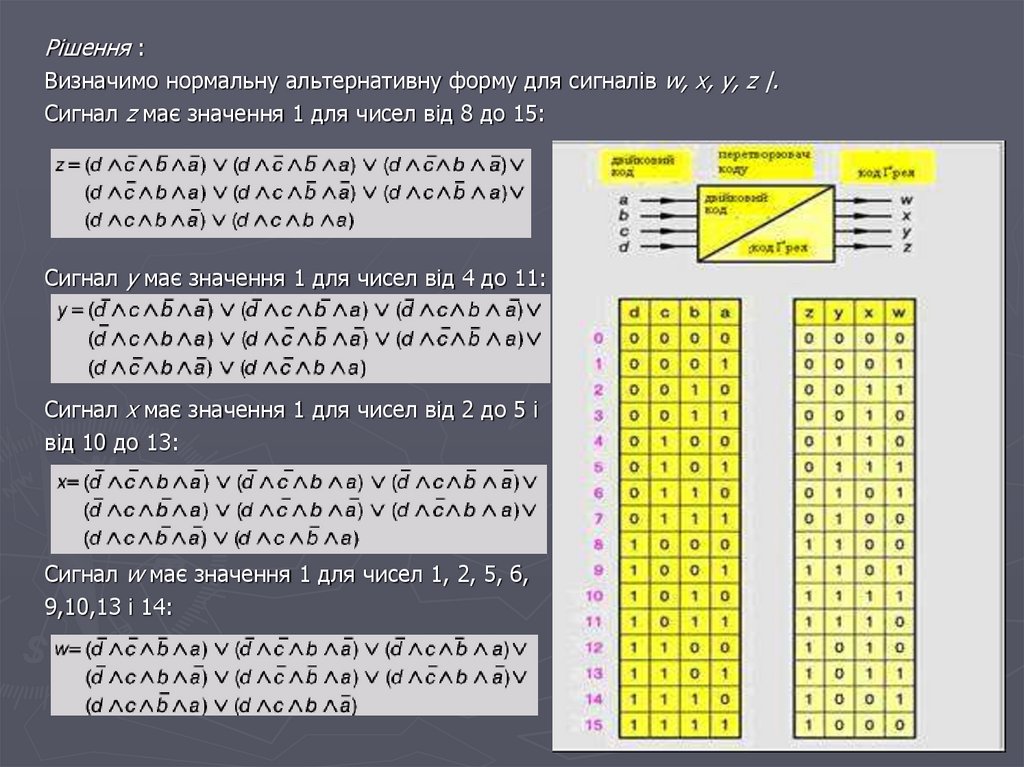
Рішення :Визначимо нормальну альтернативну форму для сигналів w, x, y, z |.
Сигнал z має значення 1 для чисел від 8 до 15:
Сигнал y має значення 1 для чисел від 4 до 11:
Сигнал x має значення 1 для чисел від 2 до 5 і
від 10 до 13:
Сигнал w має значення 1 для чисел 1, 2, 5, 6,
9,10,13 і 14:
3.
4.
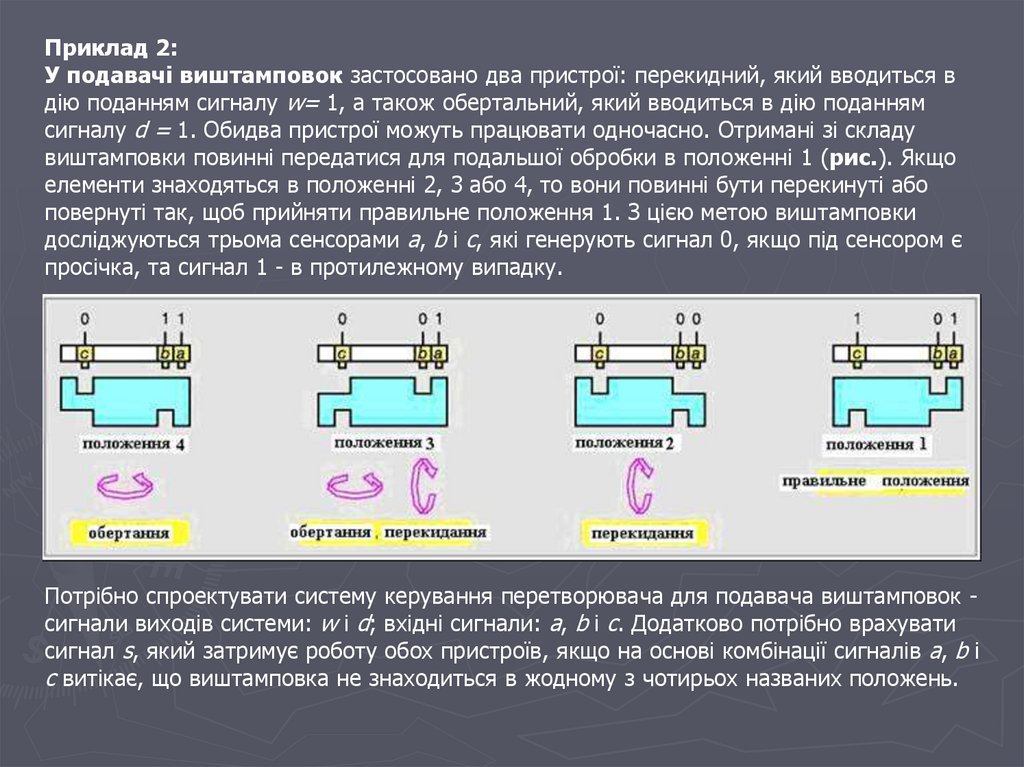
Приклад 2:У подавачі виштамповок застосовано два пристрої: перекидний, який вводиться в
дію поданням сигналу w= 1, а також обертальний, який вводиться в дію поданням
сигналу d = 1. Обидва пристрої можуть працювати одночасно. Отримані зі складу
виштамповки повинні передатися для подальшої обробки в положенні 1 (рис.). Якщо
елементи знаходяться в положенні 2, 3 або 4, то вони повинні бути перекинуті або
повернуті так, щоб прийняти правильне положення 1. З цією метою виштамповки
досліджуються трьома сенсорами а, b і c, які генерують сигнал 0, якщо під сенсором є
просічка, та сигнал 1 - в протилежному випадку.
Потрібно спроектувати систему керування перетворювача для подавача виштамповок сигнали виходів системи: w і d; вхідні сигнали: а, b і c. Додатково потрібно врахувати
сигнал s, який затримує роботу обох пристроїв, якщо на основі комбінації сигналів а, b і
c витікає, що виштамповка не знаходиться в жодному з чотирьох названих положень.
5.
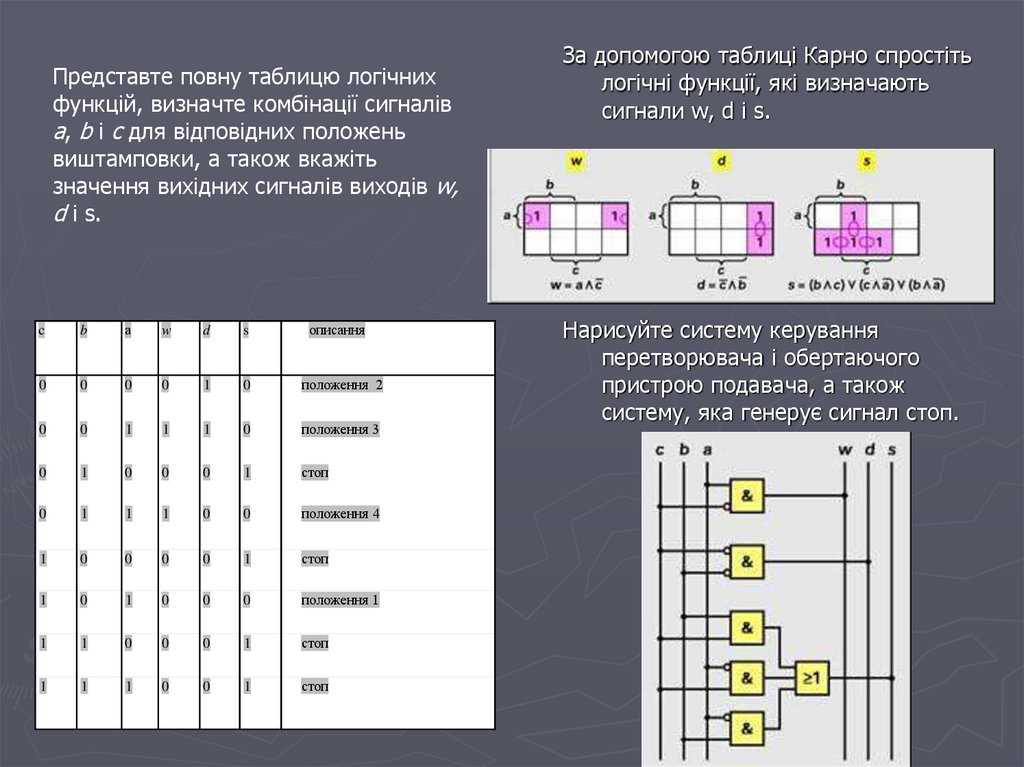
Представте повну таблицю логічнихфункцій, визначте комбінації сигналів
а, b і c для відповідних положень
виштамповки, а також вкажіть
значення вихідних сигналів виходів w,
d і s.
c
b
а
w
d
s
описання
0
0
0
0
1
0
положення 2
0
0
1
1
1
0
положення 3
0
1
0
0
0
1
cтоп
0
1
1
1
0
0
положення 4
1
0
0
0
0
1
cтоп
1
0
1
0
0
0
положення 1
1
1
0
0
0
1
cтоп
1
1
1
0
0
1
cтоп
За допомогою таблиці Карно спростіть
логічні функції, які визначають
сигнали w, d і s.
Нарисуйте систему керування
перетворювача і обертаючого
пристрою подавача, а також
систему, яка генерує сигнал стоп.
6.
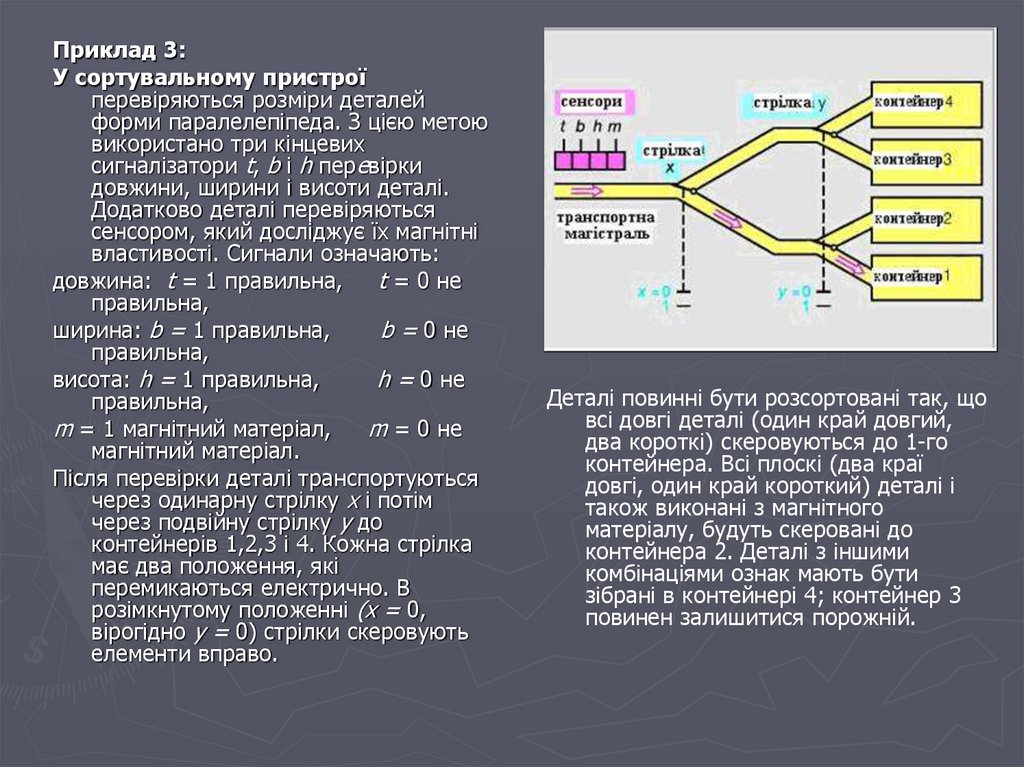
Приклад 3:У сортувальному пристрої
перевіряються розміри деталей
форми паралелепіпеда. З цією метою
використано три кінцевих
сигналізатори t, b і h перевірки
довжини, ширини і висоти деталі.
Додатково деталі перевіряються
сенсором, який досліджує їх магнітні
властивості. Сигнали означають:
довжина: t = 1 правильна,
t = 0 не
правильна,
ширина: b = 1 правильна,
b = 0 не
правильна,
висота: h = 1 правильна,
h = 0 не
правильна,
m = 1 магнітний матеріал, m = 0 не
магнітний матеріал.
Після перевірки деталі транспортуються
через одинарну стрілку x і потім
через подвійну стрілку y до
контейнерів 1,2,3 і 4. Кожна стрілка
має два положення, які
перемикаються електрично. В
розімкнутому положенні (x = 0,
вірогідно y = 0) стрілки скеровують
елементи вправо.
Деталі повинні бути розсортовані так, що
всі довгі деталі (один край довгий,
два короткі) скеровуються до 1-го
контейнера. Всі плоскі (два краї
довгі, один край короткий) деталі і
також виконані з магнітного
матеріалу, будуть скеровані до
контейнера 2. Деталі з іншими
комбінаціями ознак мають бути
зібрані в контейнері 4; контейнер 3
повинен залишитися порожній.
7.
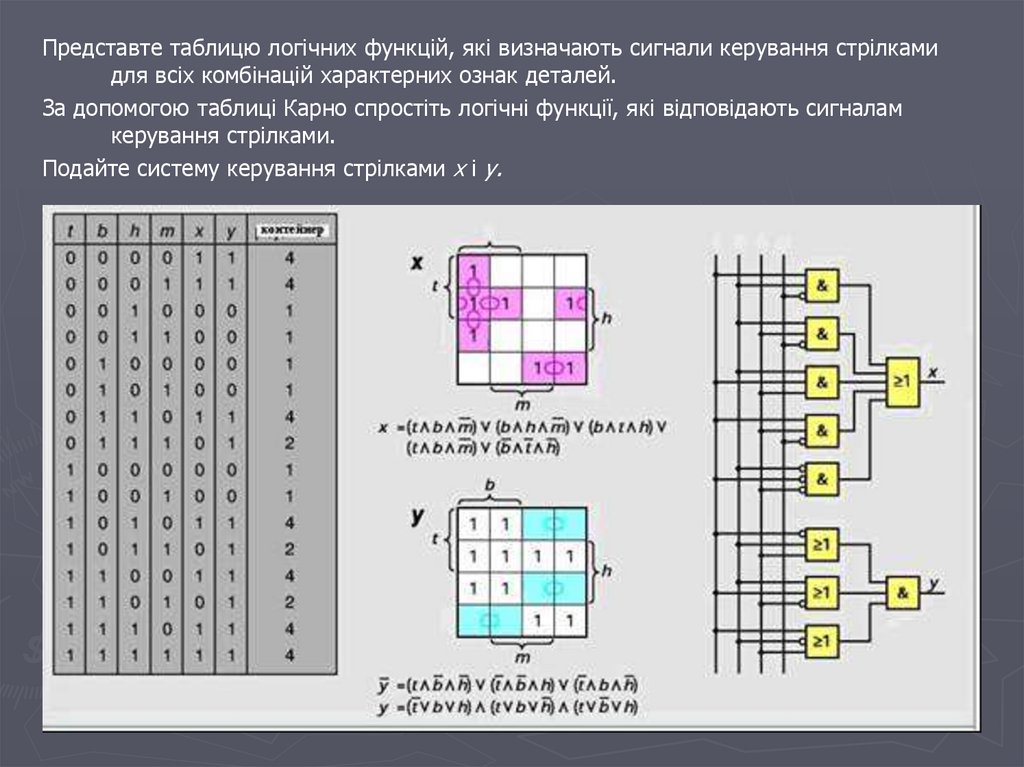
Представте таблицю логічних функцій, які визначають сигнали керування стрілкамидля всіх комбінацій характерних ознак деталей.
За допомогою таблиці Карно спростіть логічні функції, які відповідають сигналам
керування стрілками.
Подайте систему керування стрілками x і y.
8.
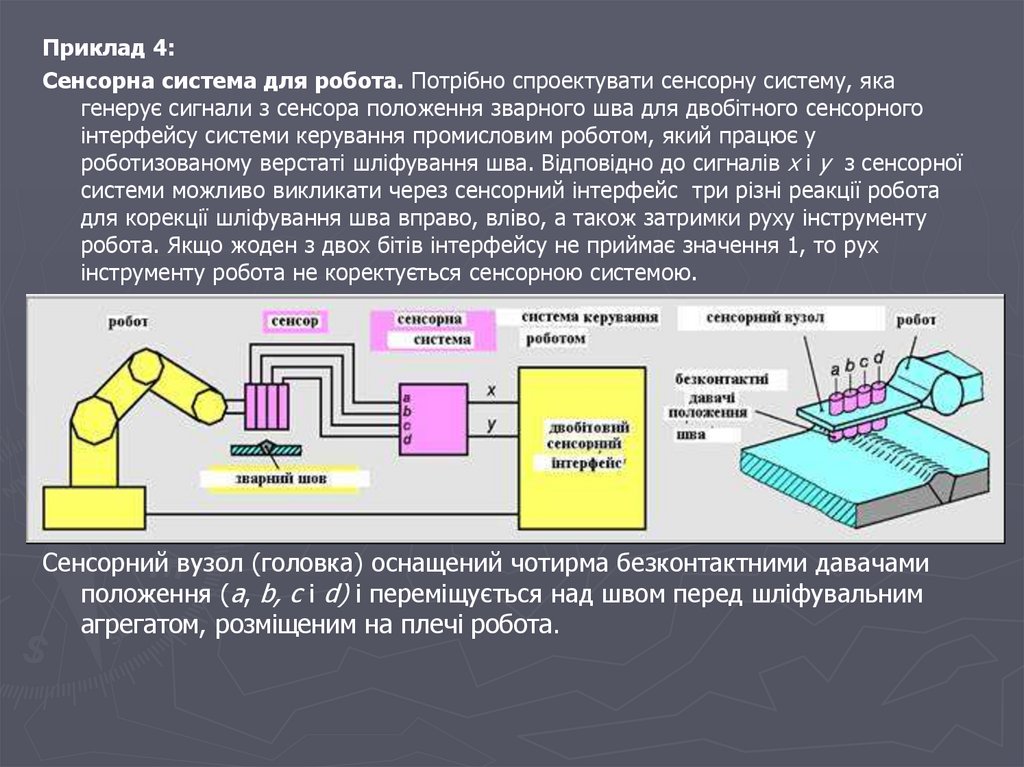
Приклад 4:Сенсорна система для робота. Потрібно спроектувати сенсорну систему, яка
генерує сигнали з сенсора положення зварного шва для двобітного сенсорного
інтерфейсу системи керування промисловим роботом, який працює у
роботизованому верстаті шліфування шва. Відповідно до сигналів x і y з сенсорної
системи можливо викликати через сенсорний інтерфейс три різні реакції робота
для корекції шліфування шва вправо, вліво, а також затримки руху інструменту
робота. Якщо жоден з двох бітів інтерфейсу не приймає значення 1, то рух
інструменту робота не коректується сенсорною системою.
Сенсорний вузол (головка) оснащений чотирма безконтактними давачами
положення (а, b, c і d) і переміщується над швом перед шліфувальним
агрегатом, розміщеним на плечі робота.
9.
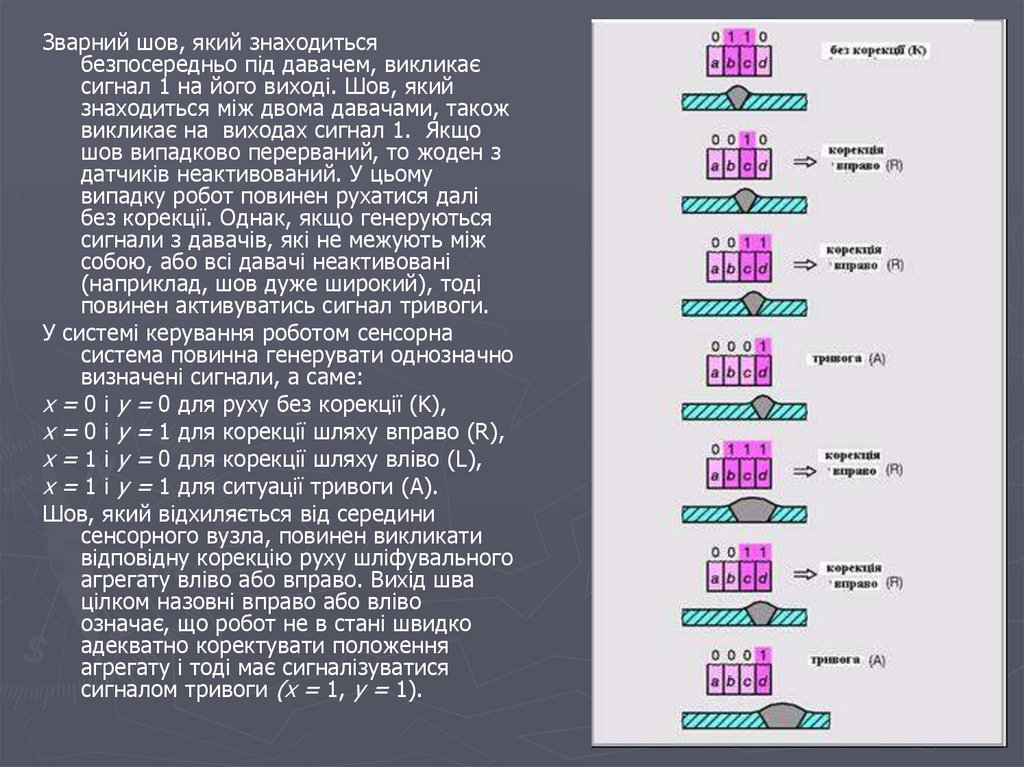
Зварний шов, який знаходитьсябезпосередньо під давачем, викликає
сигнал 1 на його виході. Шов, який
знаходиться між двома давачами, також
викликає на виходах сигнал 1. Якщо
шов випадково перерваний, то жоден з
датчиків неактивований. У цьому
випадку робот повинен рухатися далі
без корекції. Однак, якщо генеруються
сигнали з давачів, які не межують між
собою, або всі давачі неактивовані
(наприклад, шов дуже широкий), тоді
повинен активуватись сигнал тривоги.
У системі керування роботом сенсорна
система повинна генерувати однозначно
визначені сигнали, а саме:
x = 0 і y = 0 для руху без корекції (K),
x = 0 і y = 1 для корекції шляху вправо (R),
x = 1 і y = 0 для корекції шляху вліво (L),
x = 1 і y = 1 для ситуації тривоги (A).
Шов, який відхиляється від середини
сенсорного вузла, повинен викликати
відповідну корекцію руху шліфувального
агрегату вліво або вправо. Вихід шва
цілком назовні вправо або вліво
означає, що робот не в стані швидко
адекватно коректувати положення
агрегату і тоді має сигналізуватися
сигналом тривоги (x = 1, y = 1).
10.
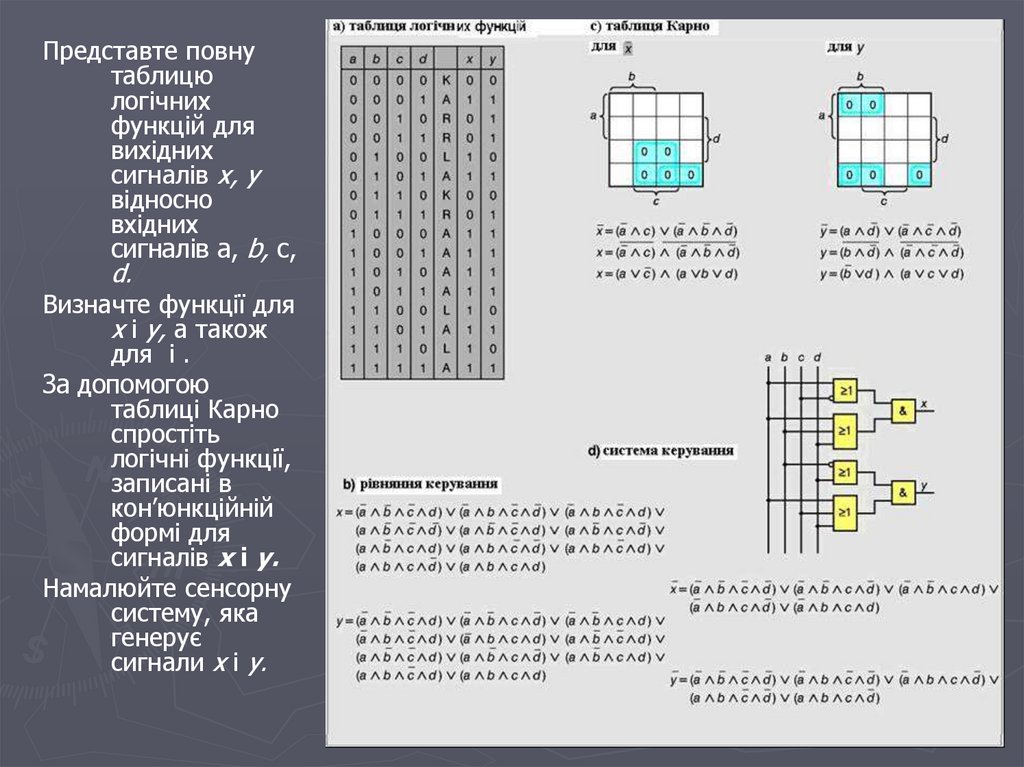
Представте повнутаблицю
логічних
функцій для
вихідних
сигналів x, y
відносно
вхідних
сигналів а, b, c,
d.
Визначте функції для
x і y, а також
для і .
За допомогою
таблиці Карно
спростіть
логічні функції,
записані в
кон’юнкційній
формі для
сигналів x і y.
Намалюйте сенсорну
систему, яка
генерує
сигнали x i y.