



















 Электроника
ЭлектроникаПохожие презентации:










Робот – помощник
1. «Робот – помощник».
Исследовательская работа.«РОБОТ – ПОМОЩНИК».
Выполнил
Ученик 4 «Б» класса
МАОУ Гимназия
Казанцев Тимофей
НГО
2018-2019 г.
2.
3. Цель исследования:
изготовить и провести испытание моделиустройства, помогающего в уборке дома из
конструктора LEGO Mindstorms NXT.
4. Задачи
Узнать роль роботов в быту человека.Изучить схемы и конструкции аналогичных
устройств.
Выбрать наиболее подходящую схему для
сборки.
Изготовить робота-помощника и провести его
испытание.
Выбрать алгоритм передвижения, написать
программу.
5. Предмет исследования:
самодельное устройство из конструктора LEGOMindstorms NXT.
Гипотеза:
я предполагаю, что робота, помогающего
в уборке дома, можно сделать из
конструктора,
а
его
применение
существенно облегчит домашний труд.
6. Объект исследования:
наиболее подходящая конструкцияробота и алгоритмы его передвижения.
Методы исследования:
• анкетирование
• изучение информации
• анализ технических инструкций
подобных роботов
• эксперимент
• анализ полученных данных
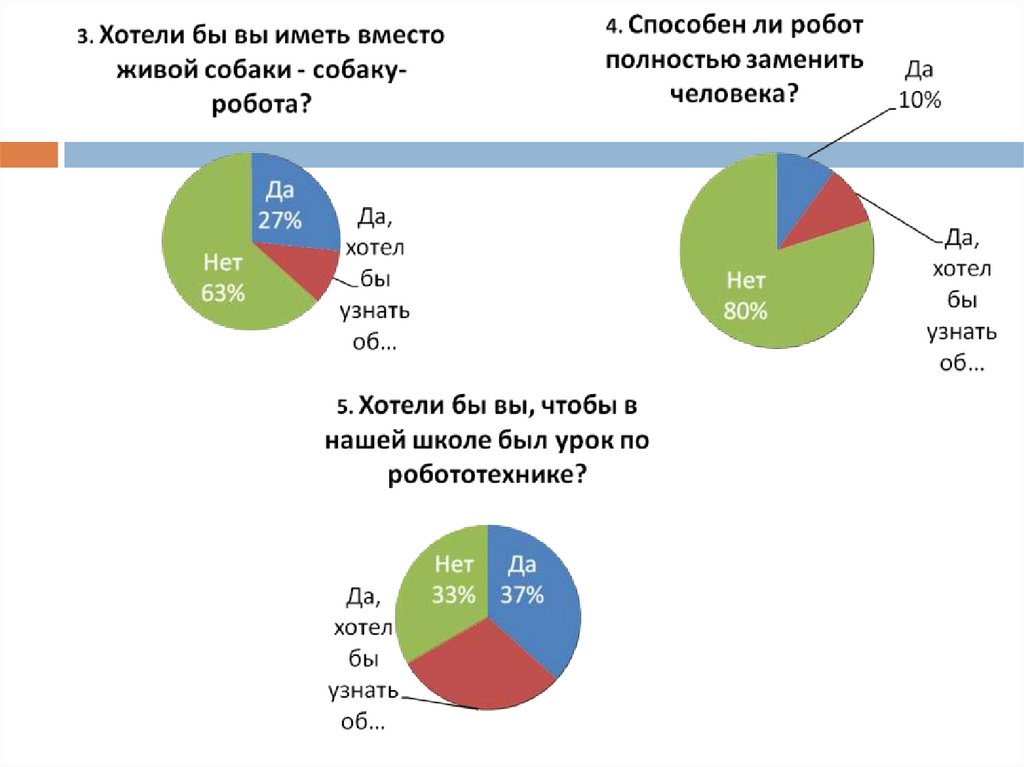
7. Анкетирование
8.
9.
Виды роботов-помощников.робот-газонокосилка
робот-качалка
робот-мойщик окон
роботы-уборщики
(робот-пылесос и робот-полотер)
10. Виды роботов-уборщиков
Виды роботов-уборщиковиспользующие только силу всасывания
использующие силу всасывания и турбощетку
использующие силу всасывания, и
двойную турбощетку
влажный полотер
сухой полотер
моющий робот
11.
12. Используемые датчики в роботах-пылесосах
Используемые датчики в роботахпылесосахультразвуковые дальномеры
контактные датчики препятствий
бесконтактные датчики препятствий
«виртуальная стена», которая позволяет ограничить
пространство уборки
«координатор движения»-это «виртуальная стена»,
которая может включаться и выключаться
самостоятельно.
видеокамеры и технологии машинного зрения
13.
14. Достоинства и недостатки роботов-уборщиков
Достоинства и недостатки роботовуборщиковнедостаток мощности и возможности собирать
все загрязнения с пола
робот мобилен и питается от аккумуляторов, но
есть необходимость в периодической зарядки на
«базе»
не у всех роботов-пылесосов используется
оптимальный маршрут движения
15. Эволюция робота-помощника
16.
17.
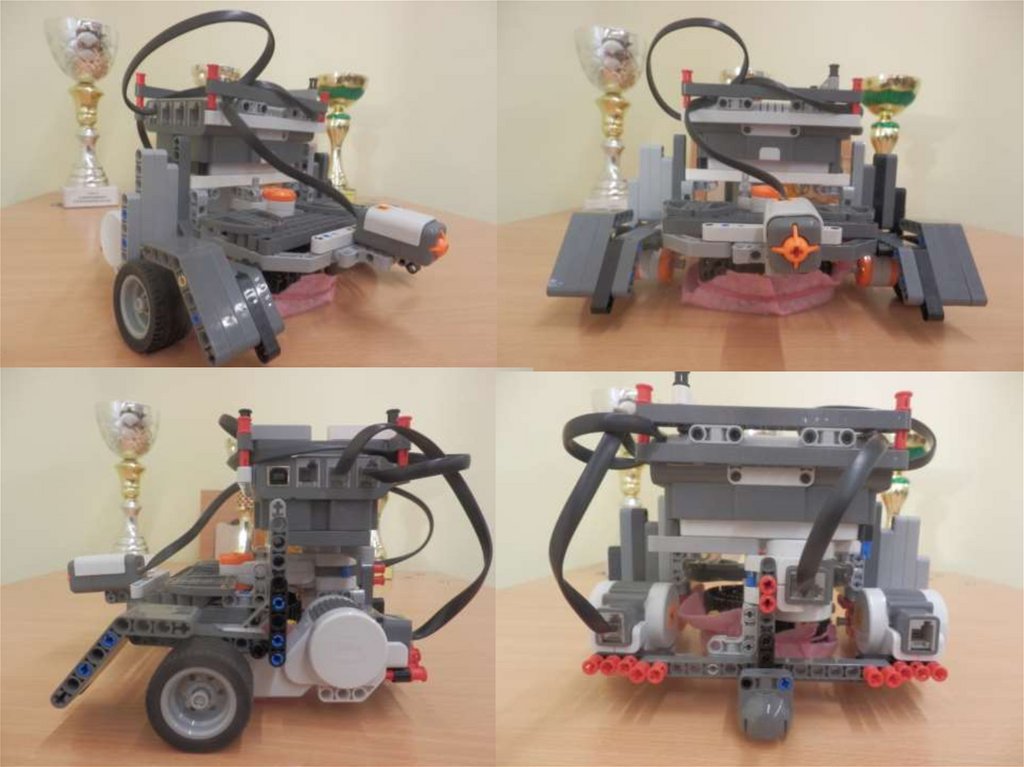
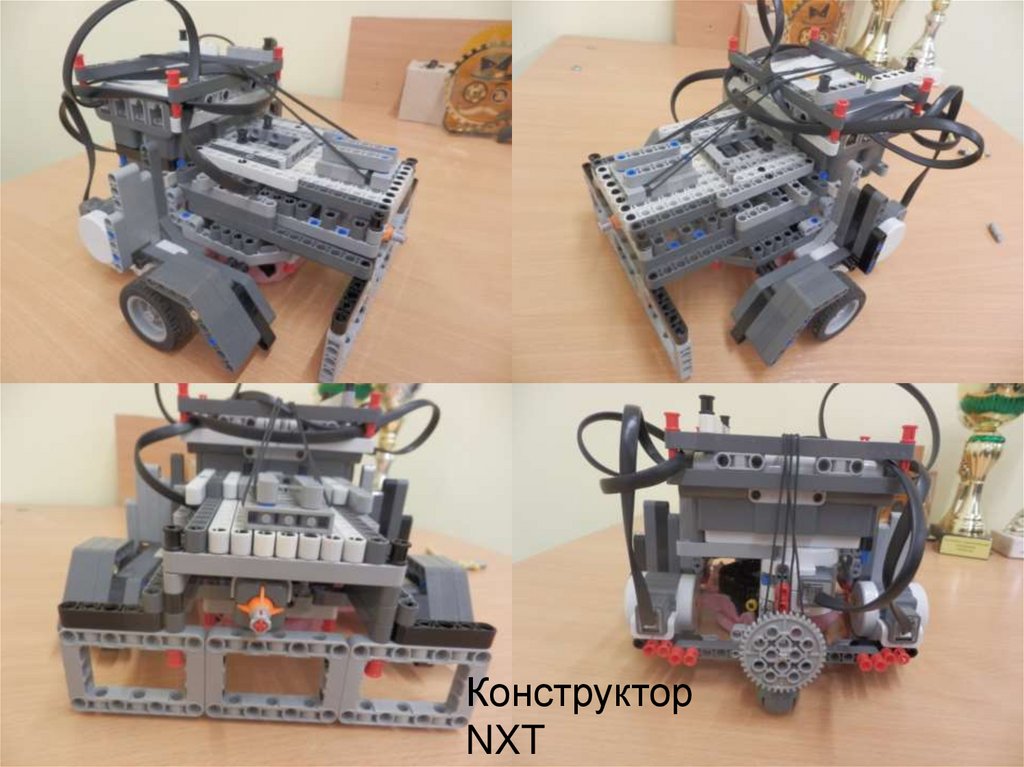
18.
КонструкторNXT
19.
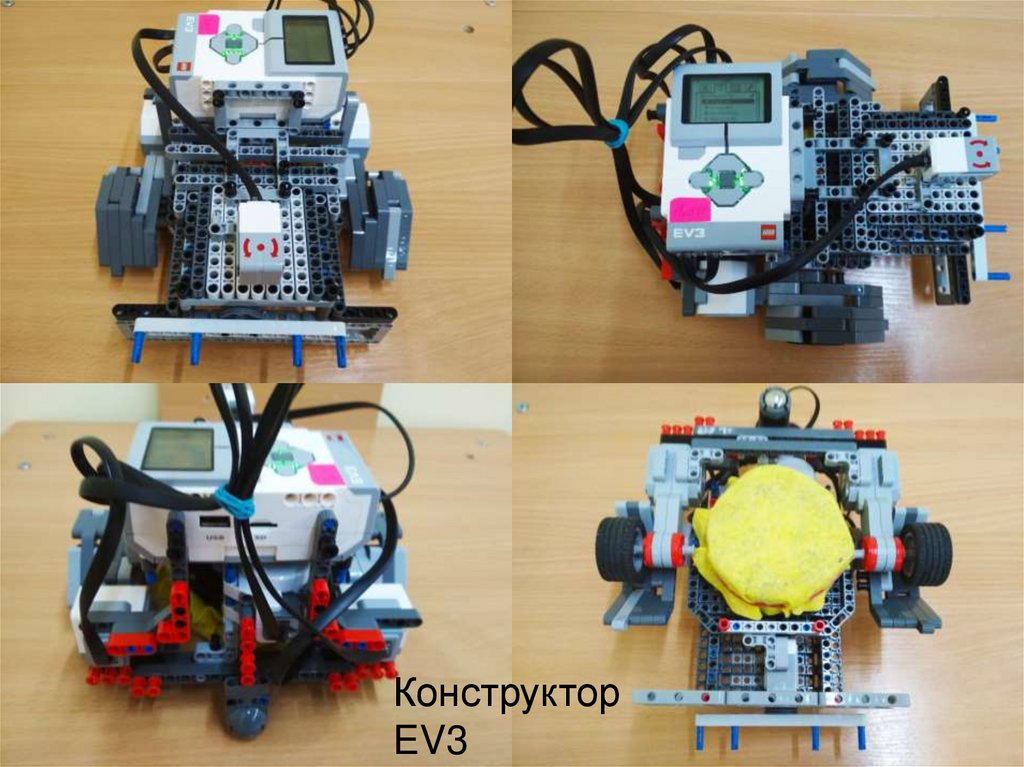
КонструкторEV3
20.
ПРОГРАММА ДВИЖЕНИЯ РОБОТАКод для программы был написан в среде разработки EV3 Programming.
Движение происходит по траектории «змейкой», что обеспечивает
более тщательный и последовательную уборку поверхности.
21.
БЛОК ПОВОРОТА С ДАТЧИКОМ ГИРОСКОПА22. После уборки
23. Выводы
ВыводыВ результате своей исследовательской работы я
узнал какие виды роботов-уборщиков
существуют и какие виды датчиков на них
используются.
Я понял, что роботы-помощники нужны людям,
они могут облегчить их труд.
Мне удалось сделать робота-уборщика и
испытания его прошли успешно.
24. Благодарность за помощь в исследовательской работе.
Калининой Ольге Анатольевне,преподавателю робототехники СЮТ
Юлдашевой Ольге Михайловне,
моему классному руководителю