











 Электроника
ЭлектроникаПохожие презентации:










Создание робота на основе конструктора Lego mindstorms EV3. Робот-помощник
1.
Муниципальное бюджетное образовательное учреждениедополнительного образования "Планета«
городского округа Тольятти
ТВОРЧЕСКИЙ ПРОЕКТ
«СОЗДАНИЕ РОБОТА НА ОСНОВЕ
КОНСТРУКТОРА LEGO MINDSTORMS EV3
«РОБОТ- ПОМОЩНИК»
(ДОСТАВЩИК ЛЕКАРСТВ, КОРРЕСПОНДЕНЦИИ И Т.Д.)
Выполнил
ученик 8 «Д» класса МБУ «Школа № 93»
Ульянин Егор
Руководители-консультанты
Епанешникова Н.С.
Меркулова С.В.
2.
ОПИСАНИЕ ПРОБЛЕМНОЙ СИТУАЦИИРазработка
Роботы могут быть
роботов-помощников для людей с
ограниченными возможностями играет
огромную роль в обеспечении комфорта,
самостоятельности и независимости для
таких людей. Эти технически сложные
устройства исключительно полезны и
эффективны, благодаря своей
способности выполнять разнообразные
задачи вместо или во взаимодействии с
людьми.
программированы для помощи в
ежедневных делах (приготовление пищи,
уборка помещений, покупки и доставка товаров,
поддержки в медицинском и реабилитационном
процессе. Они способны предоставить
безопасность, уход и компаньонство, что
физическую нагрузку на людей с
ограниченными возможностями, поднимает их
настроение и улучшает
качество жизни
Роботы могут доставлять
лекарства, корреспонденцию
пациентам - людям с
ограниченными возможностями
здоровья в стенах больницы, домов
инвалидов, домов престарелых,
облегчая работу медицинского
персонала.
3.
ПРОБЛЕМА ПРОЕКТАроботы – помощники имеют важное значение
для людей с ограниченными возможностями,
однако они могут быть неэффективны и
опасны для здоровья людей
4.
ЦЕЛЬисследование безопасности и
эффективности использования роботов –
помощников при помощи модели,
сделанной на базе конструктора LEGO
MINDSTORMS EV3
ЗАДАЧИ
1
Изучить различные виды автоматизированных систем,
которые лежат в основе роботизированных устройств
2.Изучить
применение
вспомогательных
цифровых
технологии для людей с физическими недостатками и
ограниченными возможностями здоровья
3.Изучить
виды роботов-помощников для людей с
ограниченными возможностями и сферу их применения
4.Изучить виды роботов – доставщиков
5.Разработать конструкцию робота - помощника который
будет выполнять функции доставки лекарств и
корреспонденции
5.
НОВИЗНА И УНИКАЛЬНОСТЬПРОЕКТА
Робот-помощник (доставщик лекарств и
корреспонденции) будет создан на базе конструктора
LEGO MINDSTORMS EV3 по авторскому проекту, не
имеет аналогов.
Робот будет запрограммирован таким образом, чтобы
максимально точно доставить необходимый груз по
траектории, останавливаясь перед препятствиями, в
том числе перед людьми с ограниченными
возможностями здоровья, не причиняя им вред.
6.
ПРЕДПОЛАГАЕМЫЙ РЕЗУЛЬТАТ, ПРОДУКТ ПРОЕКТИРОВАНИЯ И ЕГОПРАКТИЧЕСКАЯ ЗНАЧИМОСТЬ
Будет создан робот-
помощник
(доставщик
лекарств и
корреспонденции).
Вместо датчика звука
будут задействованы
кнопки управления
модулем,
так как данная модель конструктора
(LEGO MINDSTORMS EV3) не позволяет
использовать датчик звука для данных
задач.
Данный робот может стать
прототипом робота –
помощника, который будет
доставлять лекарства
и необходимые
мелкие вещи от поста
медицинской сестры до палаты
и кровати лежачего больного с
ограниченными возможностями
здоровья.
Может быть использован в
домах престарелых, домах
инвалидов и т.д.
Использование такого робота
облегчит работу
медицинского персонала.
7.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАИсследовательская деятельность
Характеристики
роботов
Роботы –
помощники для
людей с
ограниченными
возможностями
• Мобильность
• Универсальность
• Автоматизм
Автоматизированные
системы управления
как основа
робототехники
Были
изучены:
Вспомогательные
цифровые технологии для
людей с физическими
недостатками и
ограниченными
возможностями
8.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАПРАКТИЧЕСКАЯ ДЕЯТЕЛЬНОСТЬ
Были изучены виды роботов – доставщиков, потому
что робот, созданный в рамках проекта, должен
доставлять лекарства, корреспонденцию
Изучены среды программирования конструктора
LEGO MINDSTORMS EV3
Изучены роботы- доставщики, которых делают на основе
конструктора LEGO MINDSTORMS EV3
Составлен план работы по созданию робота - доставщика
9.
№1
фотография
Функции, плюсы минусы
Может ехать по линии, нет приспособления для
захвата груза
2
Есть приспособления для захвата груза, по
линии ехать не может
3
Может ехать по линии, нет приспособления для
захвата груза. Более компактная, чем модель № 1
4
Есть приспособления для захвата груза, но
приспособление неэффективно
по линии ехать не может
5
Есть приспособления для захвата груза, по
линии ехать не может.
6
Может ехать по линии, есть приспособления для
захвата груза. Нет ультразвукового датчика
10.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАЭтапы создания робота
1. составление задачи: какие действия должен выполнить робот;
2. сборка робота;
3. программирование робота на ПК согласно условиям задачи;
4. выгрузка материала непосредственно в робота;
5. проверка проделанной работы.
Составление задачи:
Мой робот должен выполнять следующие задачи:
Ехать по линии, которая используется вместо карты
местности
Останавливаться перед препятствием
Продолжать движение после удаления препятствия
Иметь «клешню» для переноса груза
Возвращаться на исходную точку после доставки
груза
11.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАСборка робота
Для робота понадобилось –
два средних мотора ev3, колёса, (необходимы для
передвижения конструкции)
втулки, оси (необходимы для прикрепления колес)
1 средний мотор ev3 (необходим для работы «клешни»)
блок ev3 (необходим для хранения информации, для
согласования команд, выполняет функции
микроконтроллера)
два датчика цвета ev3 (необходимы для езды по
линии)
ультразвуковой датчик (необходим для обнаружения
препятствия)
штифты, балки, изогнутые балки, маленькие рамки
(необходимы для крепления деталей конструкции)
шестерёнки (необходимы для передачи движения)
провода (необходимы для передачи данных)
12.
Технологическая карта№
Операция
1 Создаём
основу
конструкции.
Соединяем
друг
с
другом средние моторы
и прикрепляем колёса
Фотография
Инструменты и
материалы
Два средних мотора
ev3,
колёса,
штифты, балки, оси,
втулки
2 Добавляем крепёж для
блока. Соединяяем две
рамки друг с другом и
ставим штифты.
Штифты, маленькие
рамки, балки.
3 Прикрепляем
блок.
Подключаем провода к
моторам.
Блок ev3, провода
13.
Технологическая карта№
4
Операция
Прикрепляем датчики
езды по линии.
Фотография
для
Крепим на корпус робота две
изогнутые балки, между
ними просовываем ось и
крепим на неё датчики.
5
Создаём клешню. В средний
мотор вставляем ось, крепим
на мотор рамку, а на ось
“червяка”. Крепим две балки,
на них крепим шестерёнки, а
ним присоединяем изогнутые
балки
Инструменты и
материалы
Изогнутые балки,
штифты, датчики
цвета ev3, ось.
Средний мотор ev3,
изогнутые балки,
штифты,
шестерёнки,
маленькая рамка
14.
Технологическая карта№
Операция
7
Крепим клешню на робота.
Подключаем
провода
к
мотору и датчикам.
Штифты, балки,
провода
8
Крепим
датчик
Ультразвуковой
датчик, провод,
штифты
ультразвуковой
Фотография
Инструменты и
материалы
15.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАПрограммирование робота
В своей программе мы запрограммировали следующие
действия: функции для езды по линии и основную программу.
Создание функции для езды по линии (пропорциональноинтегральный дифференциальный регулятор) – показание датчиков
вычитаются, и на основе их разности вычисляется мощность моторов.
Создание функций для: поворотов направо и налево, перекрёстков, для
того, чтобы сократить основную программу
Основная программа
Робот захватывает груз
Программа ждёт, пока не будет нажата одна из кнопок управления
модулем
Исходя из поставленной задачи (задача определяется нажатием одной
из кнопок), робот едет по определённой траектории
Во время езды по траектории робот смотрит, есть ли препятствия с
помощью ультразвукового датчика.
Если препятствие есть, то робот останавливается и ждёт, пока
препятствие не пропадёт.
В конце траектории оставляет груз, поворачивается на 180 градусов и
едет обратно.
16.
17.
Основная программаПропорционально- интегрально-дифференциальный
регулятор
18.
Поворот на право/налевоПерекрёстки
19.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАКонтроль качества
В рамках проверки работоспособности робота
необходимо проверить:
1.надежность езды по линии. Во время езды по
линии робот не съезжает с траектории
2.точность определение препятствия. При
обнаружении препятствия на расстоянии 30 см робот
останавливается и ждёт, пока препятствие не
пропадёт.
3. надежность захвата груза. Во время пути робот
держит груз, не роняет его.
20.
ПРОВЕРКА ПРОДЕЛАННОЙ РАБОТЫБыли проведены
тестовые запуски робота
для того, чтобы выявить
недостатки.
Выявленные
недостатки в программе
были сразу устранены.
1.Езда по линии. Робот
съезжал с линии, но
после настройки
коэффициентов стал
ездить точно.
2. Захват. Клешня не
закрывалась до нужного
угла, но после
настройки градусов
захвата стала
закрываться правильно.
21.
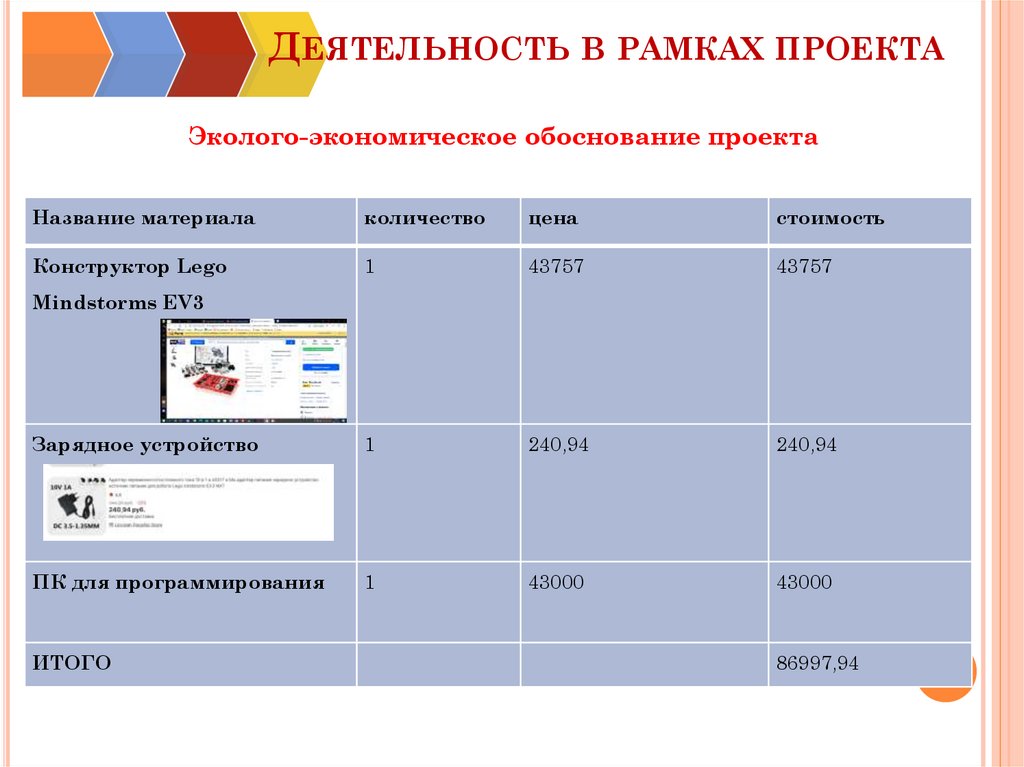
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАЭколого-экономическое обоснование проекта
Название материала
количество
цена
стоимость
Конструктор Lego
1
43757
43757
Зарядное устройство
1
240,94
240,94
ПК для программирования
1
43000
43000
Mindstorms EV3
ИТОГО
86997,94
22.
ДЕЯТЕЛЬНОСТЬ В РАМКАХ ПРОЕКТАЭколого-экономическое обоснование проекта
Все детали
сделаны из безопасного
пластика. Все детали можно
использовать большое
количество раз для создания
разных проектов. Пластик, из
которого сделан конструктор
можно использовать вторично.
Все
необходимые материалы
есть в объединении
«Робототехника», поэтому
на изготовление робота
было потрачено –
0 рублей
23.
САМООЦЕНКАСделанный проект решает все поставленные задачи:
Были изучены различные виды автоматизированных систем, которые
лежат в основе роботизированных устройств
Были рассмотрены применение вспомогательных цифровых
технологии для людей с физическими недостатками и ограниченными
возможностями здоровья
Изучены виды роботов-помощников для людей с ограниченными
возможностями и сфера их применения
Были изучены виды роботов – доставщиков
Была разработана конструкцию робота – помощника, который
выполняет функции доставки лекарств и корреспонденции
Робот выполняет все функции, которые были запрограммированы:
останавливается перед препятствием, что является обеспечением
безопасности для людей, использующих данную модель и находящихся
рядом;
Доставляет груз по назначению.
Я очень хочу, чтобы мое увлечение стало моей профессией, но если я не
стану инженером-программистом, я знаю, что навыки, приобретенные
при занятиях робототехникой, пригодятся мне в дальнейшем и в учебе,
и в работе.