


















































 Физика
ФизикаПохожие презентации:










Раздел: механика
1. Механика
2.
Механика•Кинематика
•Динамика
•Статика
•Законы сохранения
3.
Кинематика•Основные понятия
•Действия с векторами
•Прямолинейное движение
•Криволинейное движение
4.
Действия с векторами•Сложение векторов
•Вычитание векторов
•Умножение вектора на скаляр
•Проекции векторов
5.
Прямолинейное движение•Равномерное
•Равноускоренное
•Средняя скорость
6.
Криволинейное движение•Тело, брошенное вертикально
•Тело, брошенное горизонтально
•Тело, брошенное под углом к горизонту
•Движение тела по окружности
7.
Динамика• Явление инерции
• Законы Ньютона
1 Закон
2 Закон
3 Закон
• Закон всемирного тяготения
• Сила тяжести
• Вес тела
• Космические скорости
• Сила упругости
• Сила трения
8.
Законы сохранения•Импульс
•Закон сохранения импульса
•Работа
•Мощность
•Энергия
Кинетическая
Потенциальная
•Закон сохранения энергии
9.
Статика•1 условие равновесия
•2 условие равновесия
10.
КинематикаМеханическое движение – это изменение положения
тела относительно других тел с течением времени.
Основная задача механики – определить положение тела в
любой момент времени.
Система отсчета состоит из:
•Тела отсчета
•Системы координат
•Прибора для измерения времени
11.
КинематикаКинематика – это раздел механики, который отвечает
на вопрос: КАК движется тело?
Перемещение – вектор соединяющий начальное и
конечное положение тела.
В
S
А
Траектория – линия, по которой движется тело.
Путь – длина траектории.
12.
Кинематика13.
КинематикаМатериальная точка – тело, размерами которого
можно пренебречь.
Материальной точкой тело можно считать если:
•Его размеры малы по сравнению с пройденным
расстоянием
•Движение тела поступательно
Поступательное движение – это движение тела, при
котором траектории всех его точек одинаковы.
14.
КинематикаПоступательное движение – это движение тела, при
котором траектории всех его точек одинаковы.
15.
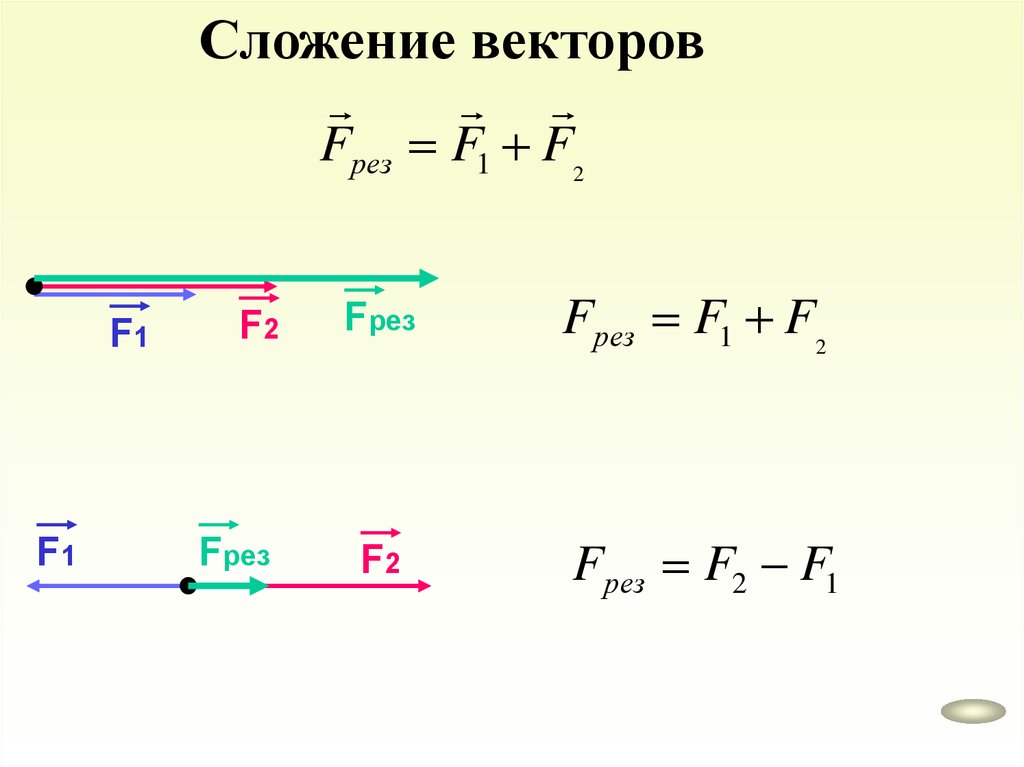
Сложение векторовFрез F1 F2
F1
F1
F2
Fрез
Fрез
Fрез F1 F2
F2
Fрез F2 F1
16.
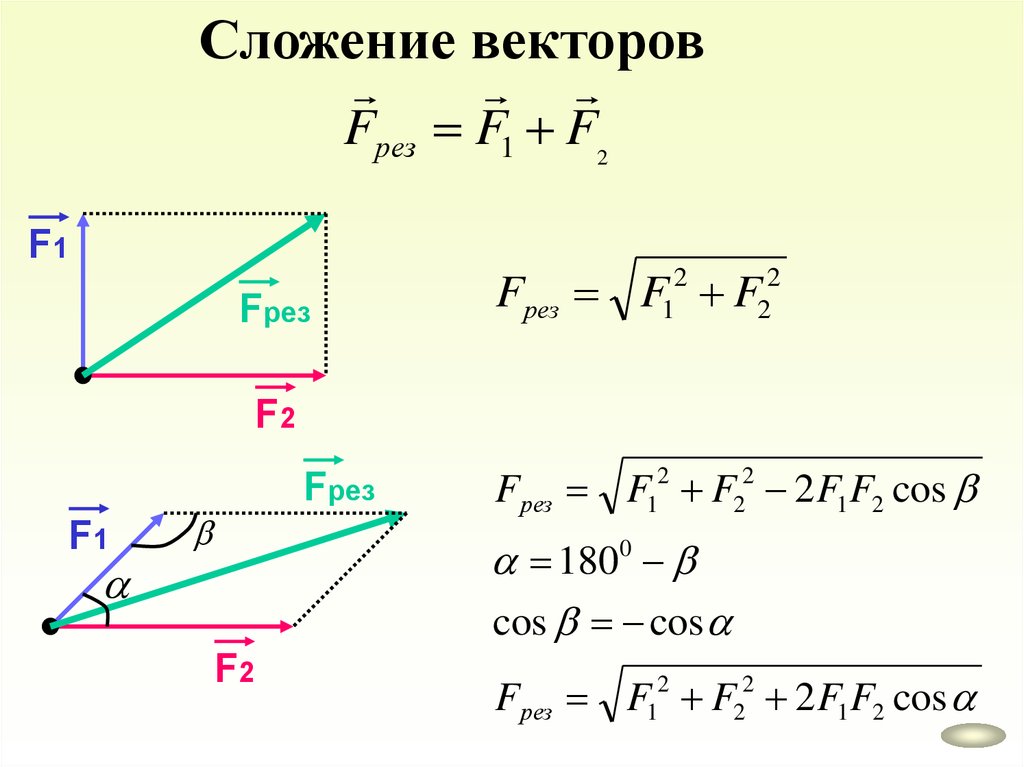
Сложение векторовFрез F1 F2
F1
Fрез
Fрез F F
2
1
2
2
F2
F1
Fрез
Fрез F F 2 F1 F2 cos
2
1
2
2
1800
cos cos
F2
Fрез F12 F22 2 F1 F2 cos
17.
Вычитание векторовFрез F1 F2
Fрез
F1
F2
Fрез F1 F2
Fрез
Fрез F2 F1
F2
F1
18.
Вычитание векторовFрез F1 F2
Fрез
F1
Fрез F F
2
1
2
2
F2
F2
Fрез
Fрез F12 F22 2F1F2 cos
F1
19.
Умножение вектора на скалярF1 F0 a
F0
a 0
F1
F0
F2
F1 F0 a
F2 F0 b
b 0
F2 F0 b
20.
Проекции векторовy
a x x2 x1
y2
ay
a
y1
0
a y y2 y1
a a a
2
x
ax
x1
x2
x
2
y
21.
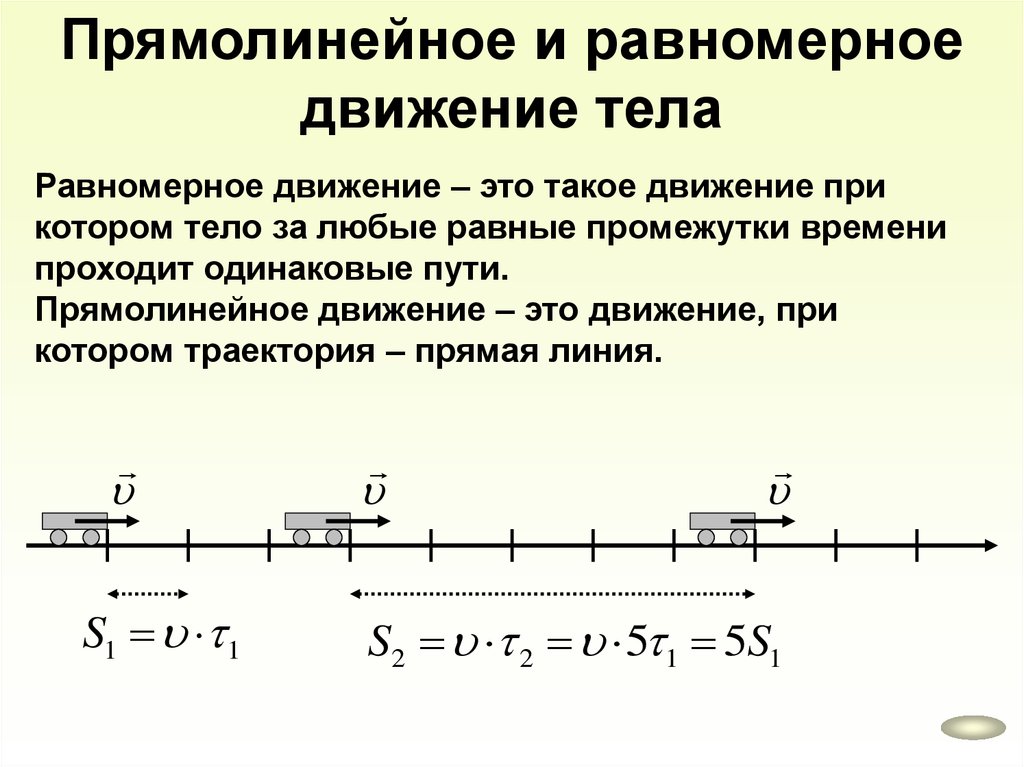
Прямолинейное и равномерноедвижение тела
Равномерное движение – это такое движение при
котором тело за любые равные промежутки времени
проходит одинаковые пути.
Прямолинейное движение – это движение, при
котором траектория – прямая линия.
S1 1
S2 2 5 1 5S1
22.
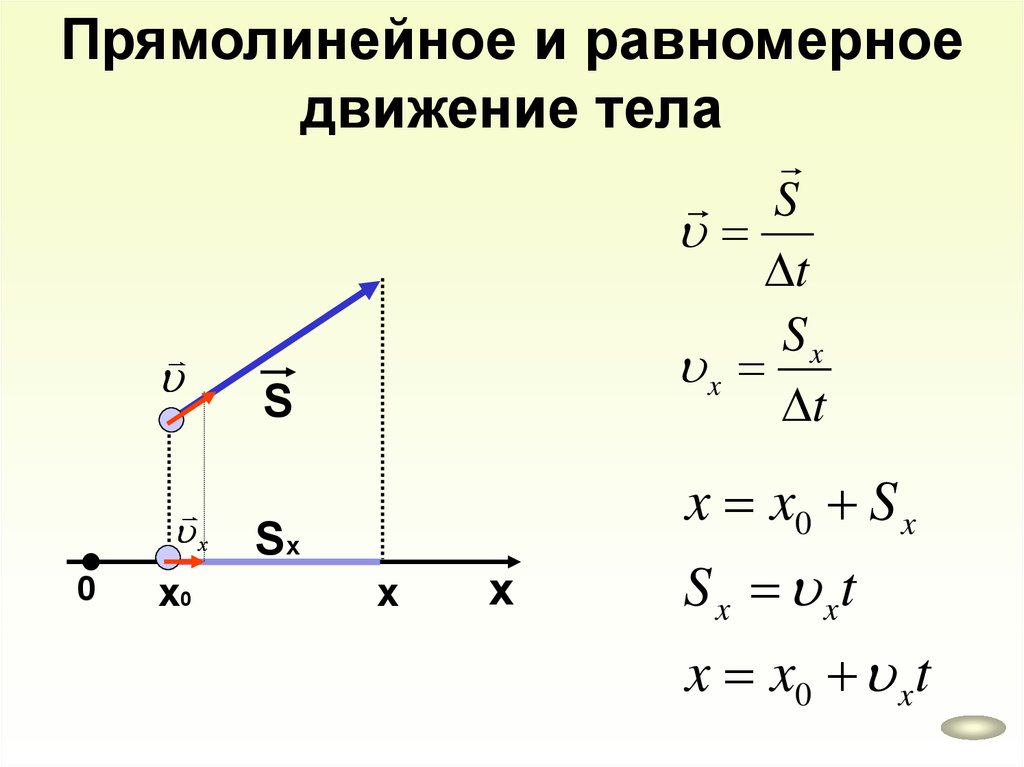
Прямолинейное и равномерноедвижение тела
S
t
Sx
x
t
S
х
0
x0
x x0 S x
Sx
x
x
S x xt
x x0 x t
23.
Скорость при равномерномпрямолинейном движении
const
S1 1
S2 2 5 1 5S1
24.
Прямолинейное и равномерноедвижение тела
1
x
1x
0
2 x
1x
2 x
0
x02
1x 0
x
х02
х01
t
x01
0
2
x1 x01 1 x t
t
2 x 0
x2 x0 2 2 x t
x
25.
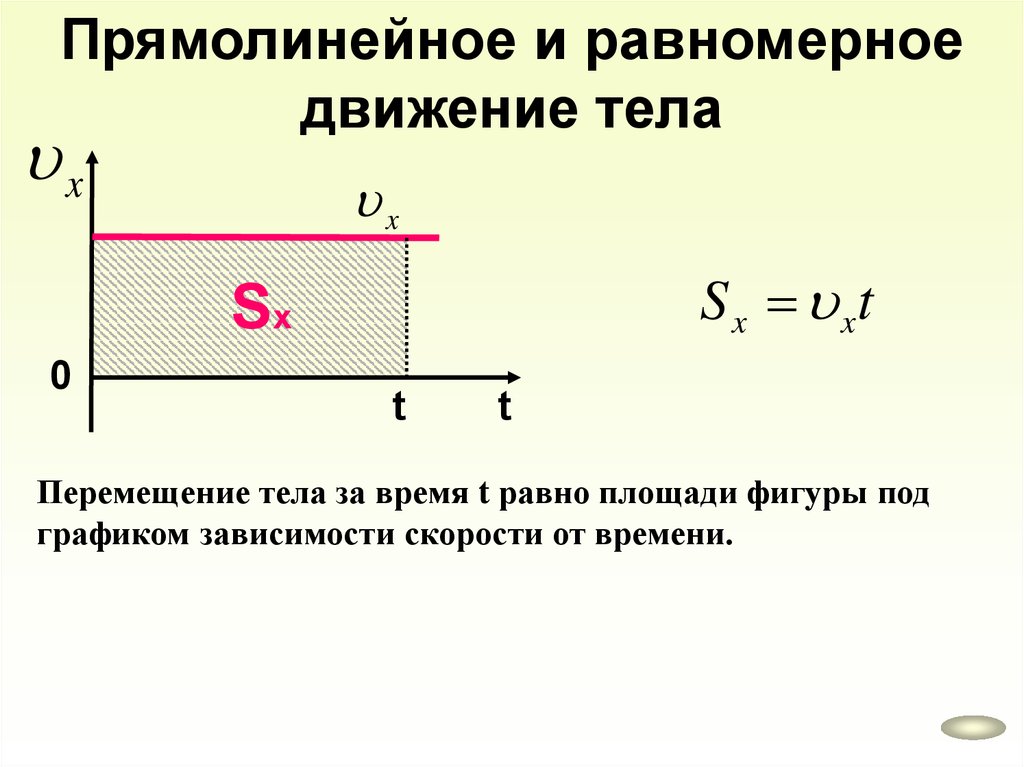
Прямолинейное и равномерноедвижение тела
x
x
S x xt
Sх
0
t
t
Перемещение тела за время t равно площади фигуры под
графиком зависимости скорости от времени.
26.
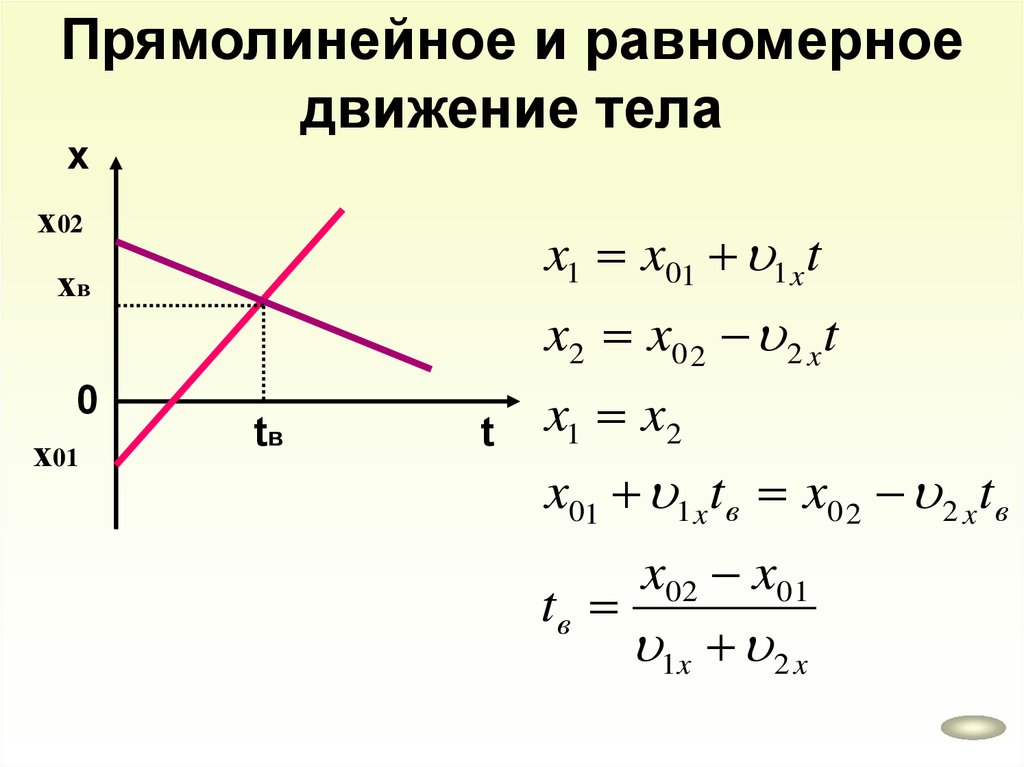
Прямолинейное и равномерноедвижение тела
x
х02
x1 x01 1 x t
хв
0
х01
x2 x0 2 2 x t
tв
t
x1 x2
x01 1 x tв x0 2 2 x tв
x02 x01
tв
1x 2 x
27.
Средняя скоростьх
S1, t1
S2, t2
Sобщ, tобщ
S пол н
ср
t пол н
S1 S 2 S3
cp
t1 t 2 t3
S3, t3
28.
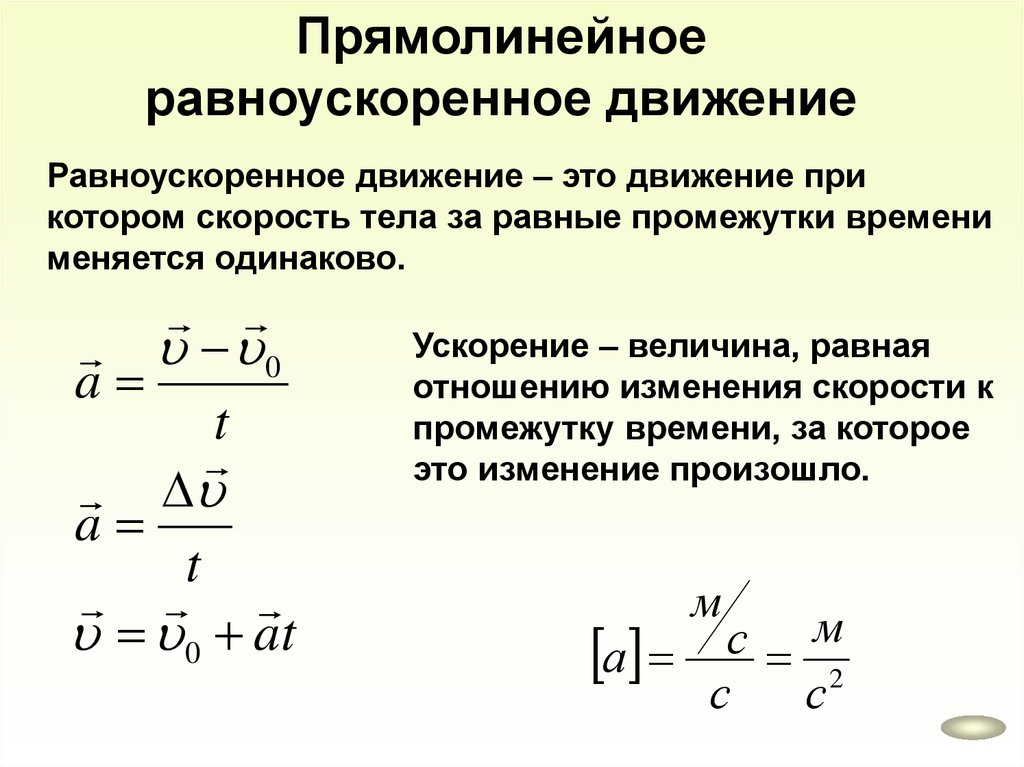
Прямолинейноеравноускоренное движение
Равноускоренное движение – это движение при
котором скорость тела за равные промежутки времени
меняется одинаково.
0
a
t
a
t
0 at
Ускорение – величина, равная
отношению изменения скорости к
промежутку времени, за которое
это изменение произошло.
м
м
с
а 2
с
с
29.
Прямолинейноеравноускоренное движение
ax
х
x 0 x
02 х
t
x 0 x a x t
01х
0
1
01
а1
1
а2 2
t
2
02
а1х 0
х
а2 х 0
а1х а2 х
30.
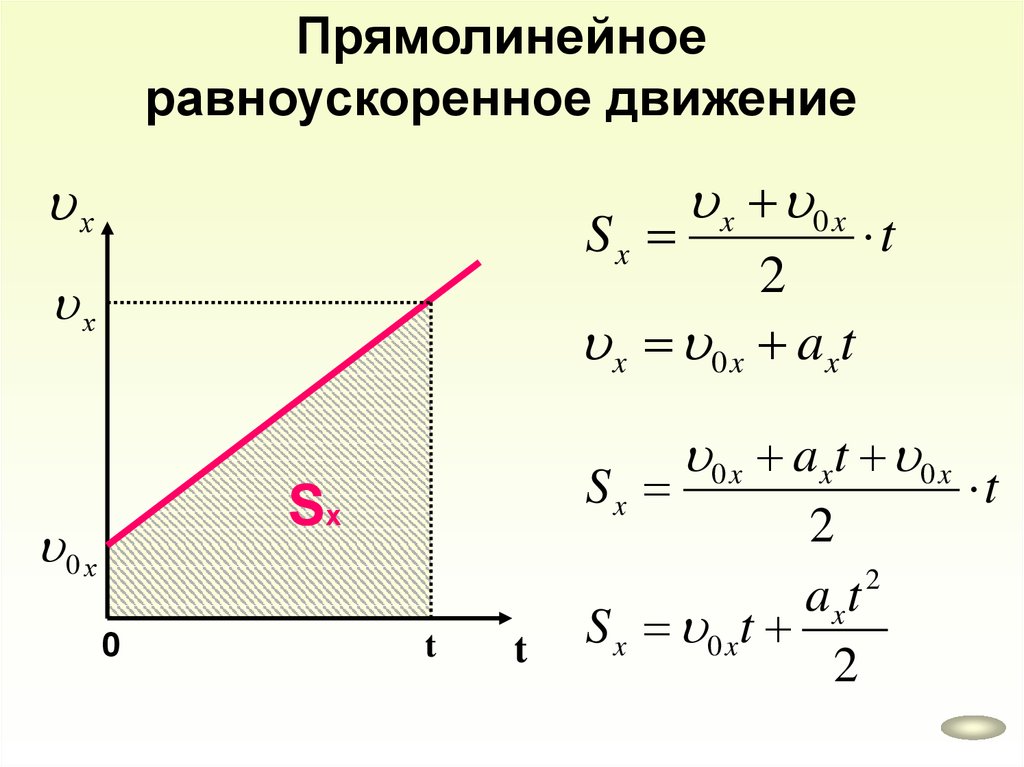
Прямолинейноеравноускоренное движение
х
Sx
x 0 x
2
x 0 x a x t
х
Sx
Sx
0 х
0
t
t
t
0 x a xt 0 x
2
2
axt
S x 0 xt
2
t
31.
Прямолинейноеравноускоренное движение
Sx
0
axt
S x 0 x t
2
t
2
x x0 S x
axt
x x0 0 xt
2
2
32.
Прямолинейноеравноускоренное движение
axt
S x 0 x t
2
x 0 x
ax
t
2
Sx
Sx
2
x
2
0x
2a
x 0 x
2
t
33.
Прямолинейноеравноускоренное движение
0
1t
2t
3t
4t
t
S1 : S2 : S3 : S4 : ... 1 : 3 : 5 : 7 : ...
34.
35.
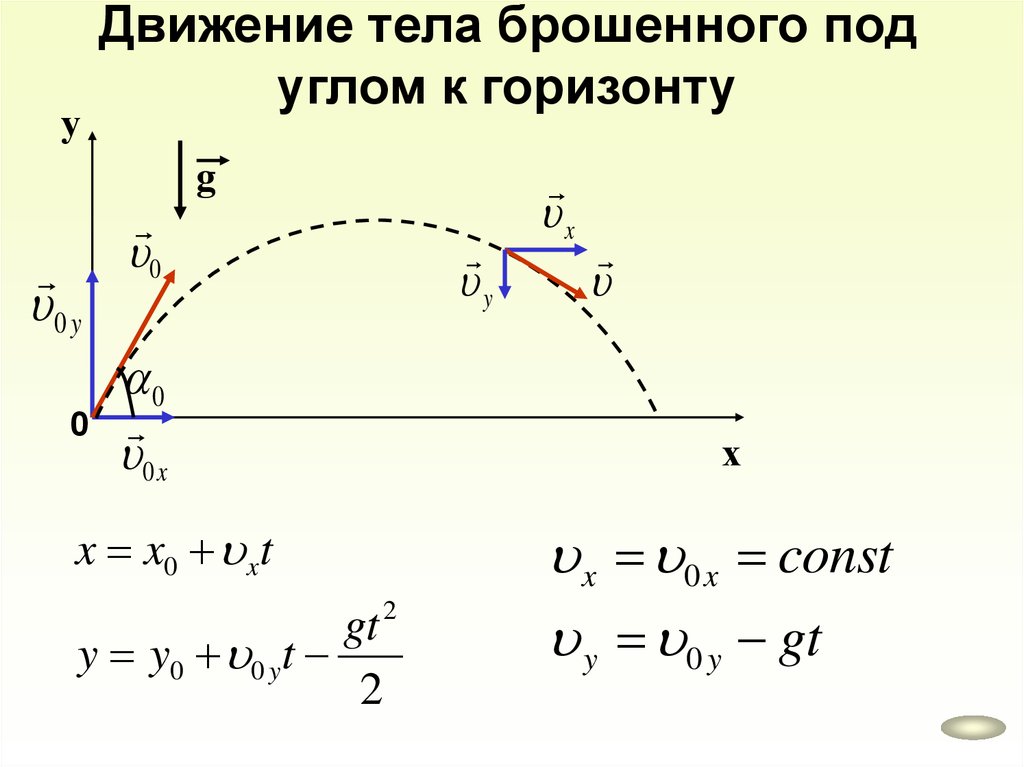
Движение тела брошенного подуглом к горизонту
36.
уДвижение тела брошенного под
углом к горизонту
g
0 y
0
0
y
x
0
0 x
х
x x0 xt
2
gt
y y0 0 y t
2
x 0 x const
y 0 y gt
37.
Движение тела брошенного подуглом к горизонту
0
0 0 x 0 y
у
0 y
g
0
y
x
0 0 x 0 y
x y
x y
0
0 x
х
0 x 0 cos 0
0 y 0 sin 0
38.
Движение тела брошенного подуглом к горизонту
у
0 y
g
0
0
0
0 x
х
tm
0 0 y g
2
2 0 y
tm
g
2 0 sin 0
tm
g
39.
Движение тела брошенного подуглом к горизонту
у
g
0 y
0
0
0
0x
xmax х
xmax 0 x t m
xmax
2 0 sin 0
0 cos 0
g
xmax
sin 2 0
2
0
g
40.
у0 y
Движение тела брошенного под
углом к горизонту
g
0
ymax
0
0
0x
х
tm
g
0 y
tm
2
0 y
0 y
2
2
g
2
ymax
ymax
ymax
0 y 2
2g
02 sin 2 0
2g
0 y
g
g
2
2
41.
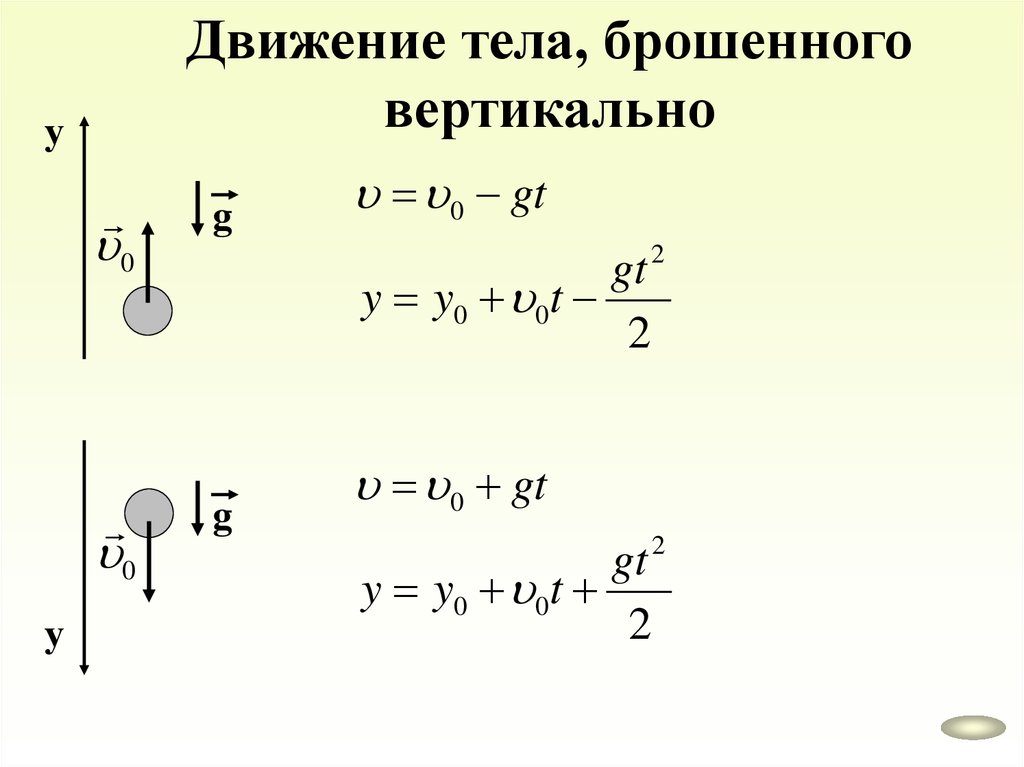
Движение тела, брошенноговертикально
у
0
0
у
g
0 gt
gt 2
y y0 0 t
2
g
0 gt
gt 2
y y0 0 t
2
42.
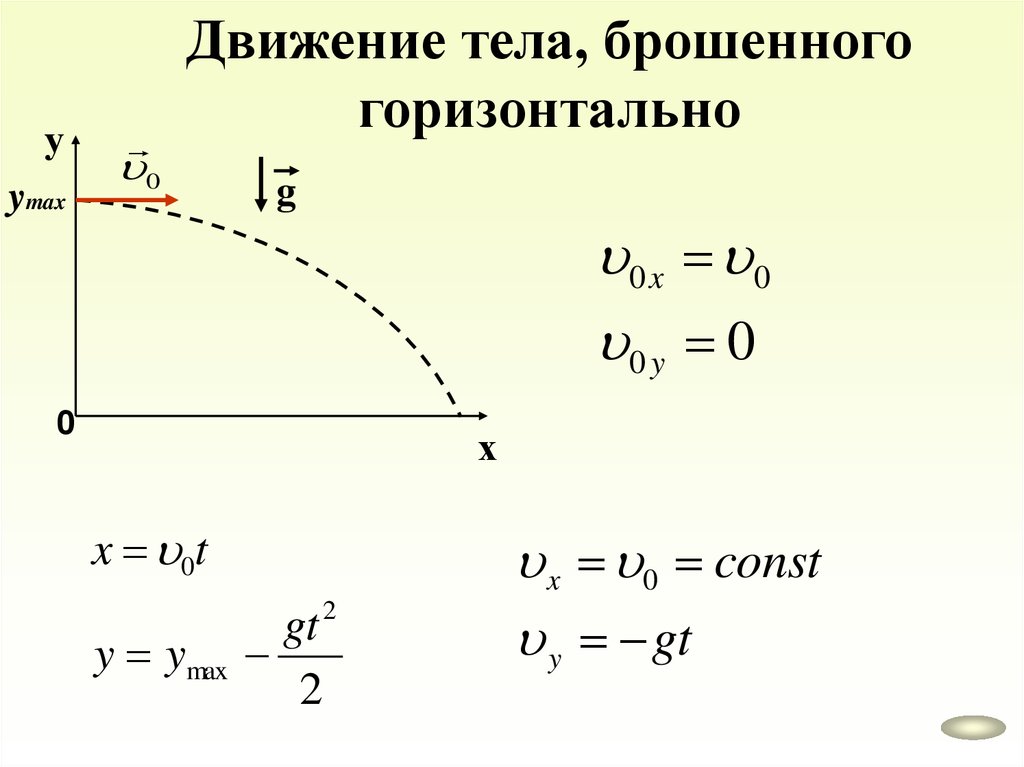
уymax
0
Движение тела, брошенного
горизонтально
g
0 x 0
0 y 0
0
х
x 0t
y ymax
2
gt
2
x 0 const
y gt
43.
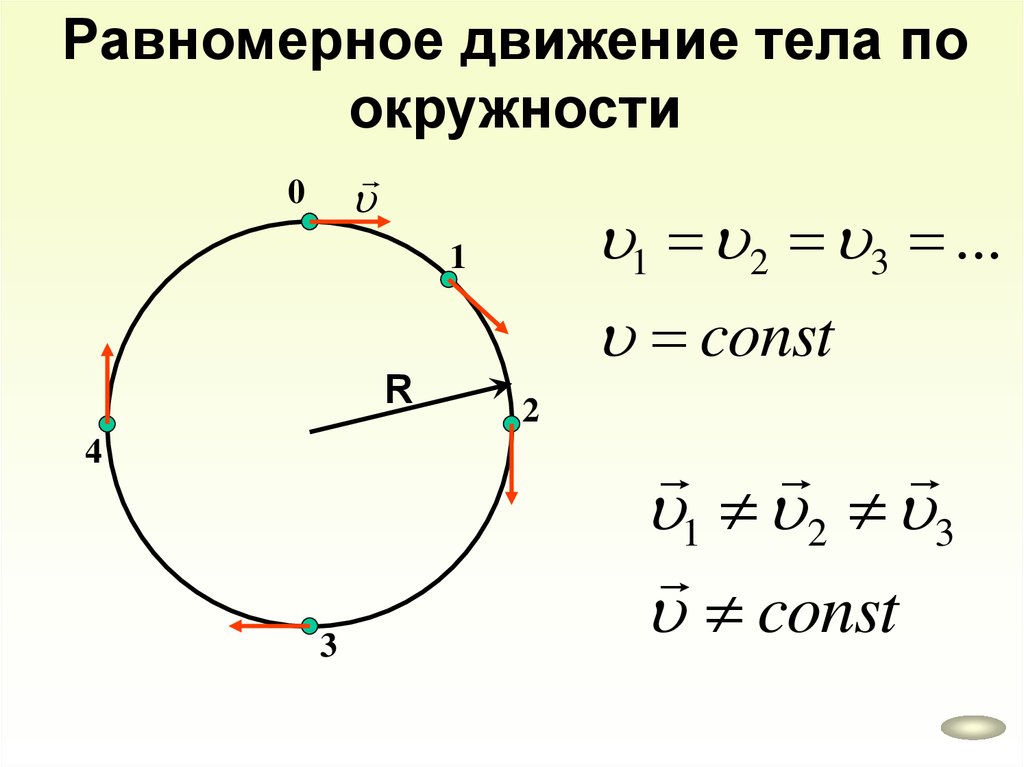
Равномерное движение тела поокружности
0
1 2 3 ...
const
1
R
2
4
3
1 2 3
const
44.
Равномерное движение тела поокружности
0
aц
0
R
1
1
0
a
t
t
a const
R
aц
2
R
45.
ДинамикаДинамика – раздел механики, который отвечает на вопрос:
ПОЧЕМУ движется тело?
Причина изменения скорости тела – воздействие на него
других тел.
Если на тело не действуют другие тела, то оно либо
покоится, либо движется прямолинейно и равномерно.
46.
Законы Ньютона1 закон Ньютона:
Существуют такие системы отсчета, относительно которых
тело движется прямолинейно и равномерно или покоится
при отсутствии внешних воздействий. Такие с.о. называются
инерциальными (ИСО).
Инерция – явление при котором скорость тела
остается неизменной при отсутствии на него внешних
воздействий.
47.
Законы НьютонаИнертность – свойство тела сохранять свою скорость
при отсутствии внешних воздействий.
Мера инертности – масса тела. (Чем больше масса
тела, тем труднее изменить его скорость).
m кг
Сила – количественная мера взаимодействия тел.
F Н
F1
Равнодействующая – векторная
сумма всех сил, действующих на
тело.
Fрез
F2
48.
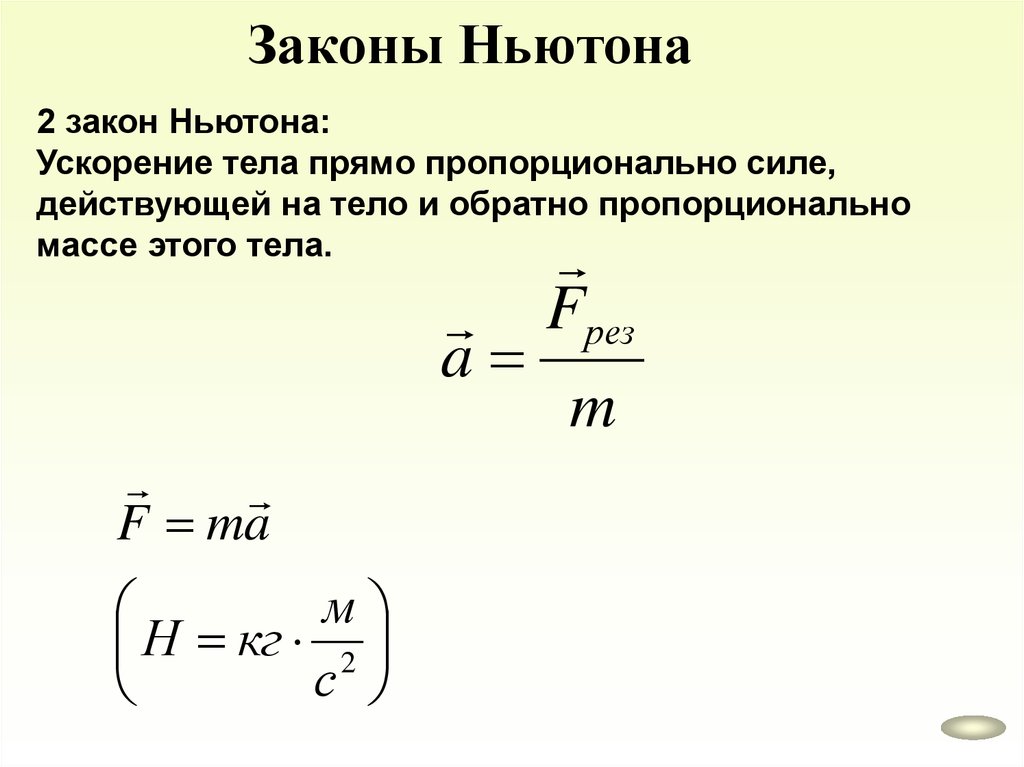
Законы Ньютона2 закон Ньютона:
Ускорение тела прямо пропорционально силе,
действующей на тело и обратно пропорционально
массе этого тела.
a
F ma
м
Н кг 2
с
Fрез
m
49.
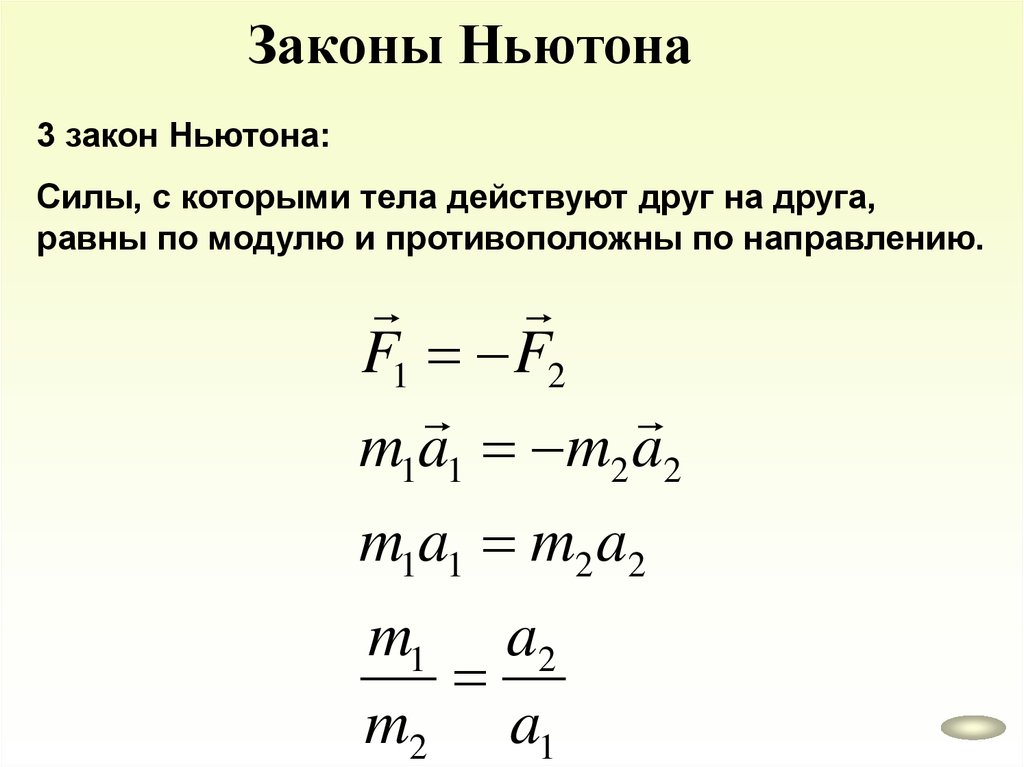
Законы Ньютона3 закон Ньютона:
Силы, с которыми тела действуют друг на друга,
равны по модулю и противоположны по направлению.
F1 F2
m1a1 m2 a2
m1a1 m2 a2
m1 a2
m2 a1
50.
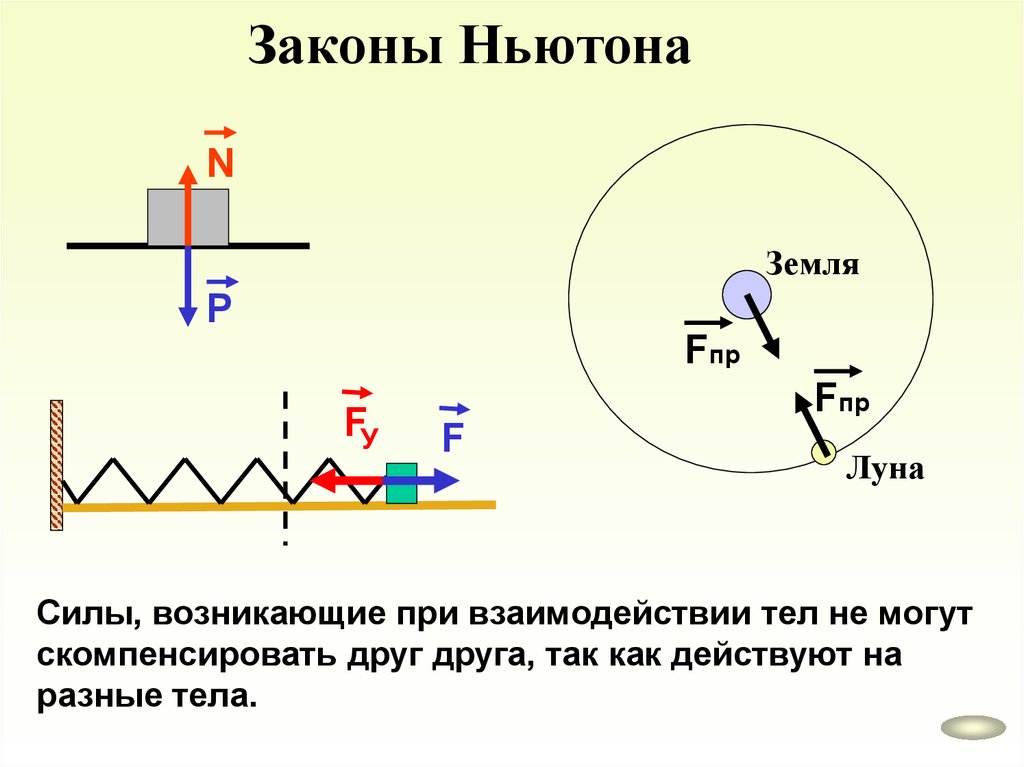
Законы НьютонаN
Земля
P
Fпр
FУ
Fпр
F
Луна
Силы, возникающие при взаимодействии тел не могут
скомпенсировать друг друга, так как действуют на
разные тела.
51.
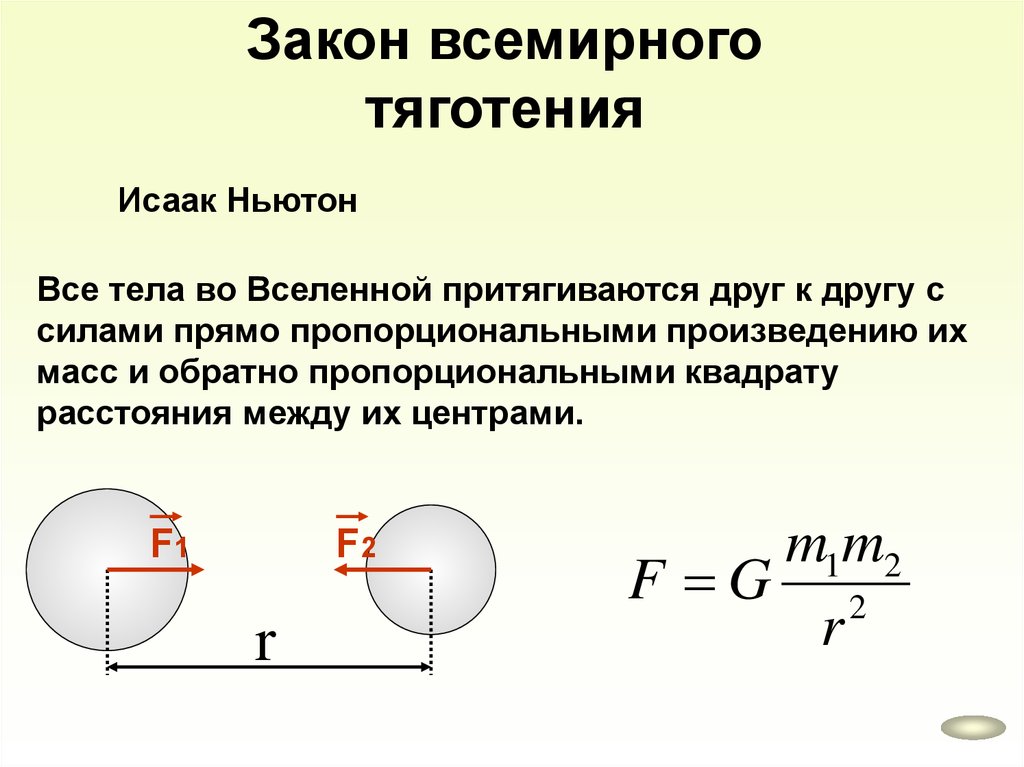
Закон всемирноготяготения
Исаак Ньютон
Все тела во Вселенной притягиваются друг к другу с
силами прямо пропорциональными произведению их
масс и обратно пропорциональными квадрату
расстояния между их центрами.
F1
F2
r
m1m2
F G 2
r
52.
Закон всемирноготяготения
F r
G
m1m2
2
Гравитационная постоянная – величина.
Численно равная силе взаимодействия
двух тел массами по 1 кг , находящихся
на расстоянии 1 м друг от друга.
2
H
м
11
G 6,672 10
кг 2
1798 г. Генри Кавендиш
53.
Сила тяжестиm
h
Мз
Rз
M Зm
FТ G 2
RЗ
FT mg
MЗ
g G 2
RЗ
м
g 9,8 2
с
MЗ
g' G
2
RЗ h
54.
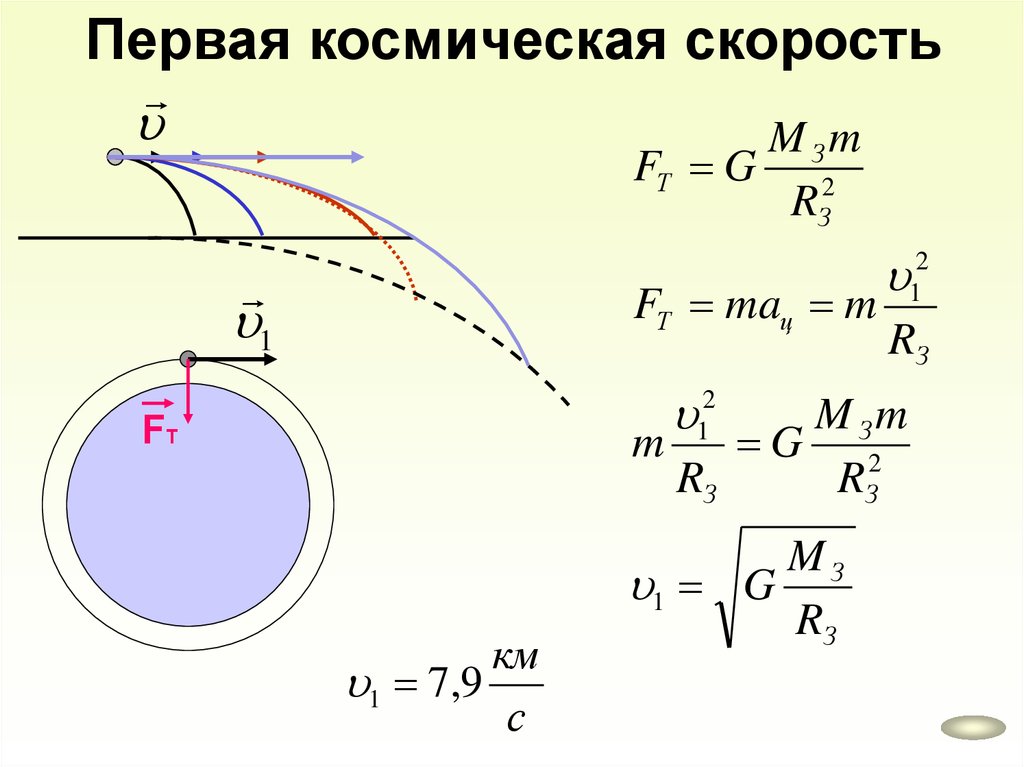
Первая космическая скоростьM Зm
FТ G 2
RЗ
FТ maц m
1
2
1
2
1
RЗ
M Зm
m
G 2
RЗ
RЗ
FТ
км
1 7,9
с
MЗ
1 G
RЗ
55.
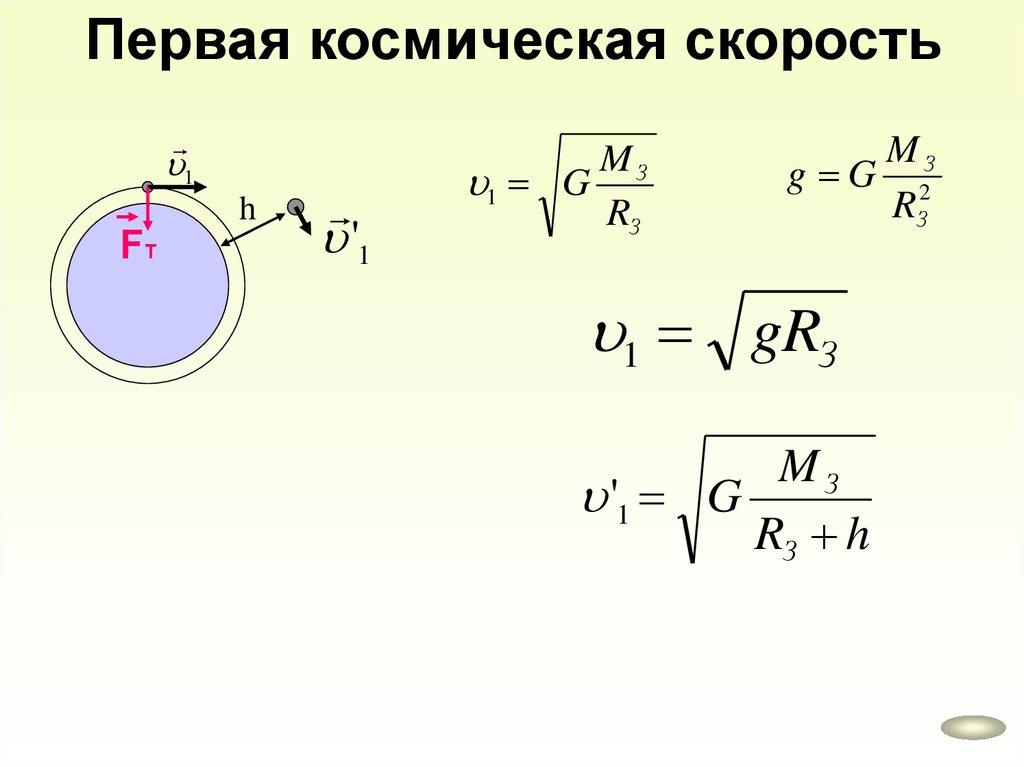
Первая космическая скорость1
h
FТ
'1
MЗ
1 G
RЗ
MЗ
g G 2
RЗ
1 gRЗ
MЗ
'1 G
RЗ h
56.
Космические скоростикм
1 7,9
с
1 2
MЗ
2 2G
RЗ
км
2 11,2
с
км
3 16,7
с
57.
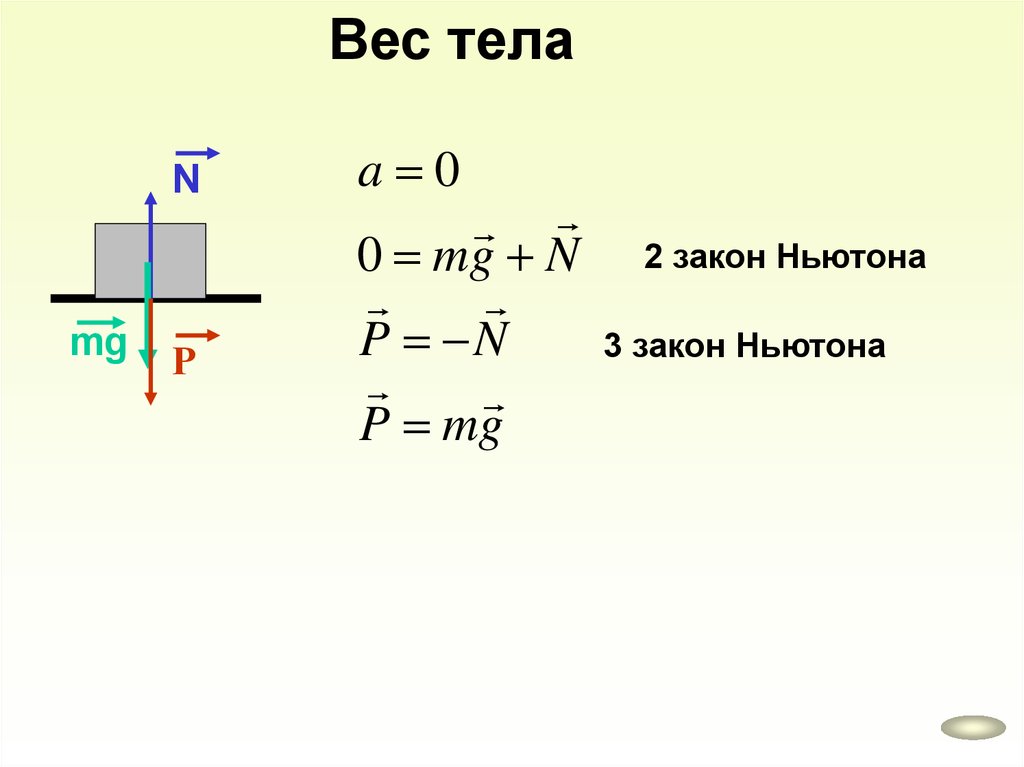
Вес телаВес – это сила, с которой тело действует на опору или
подвес.
P H
N
N
T
Р
Р
Р
58.
Вес телаN
mg
Р
a 0
0 mg N
P N
P mg
2 закон Ньютона
3 закон Ньютона
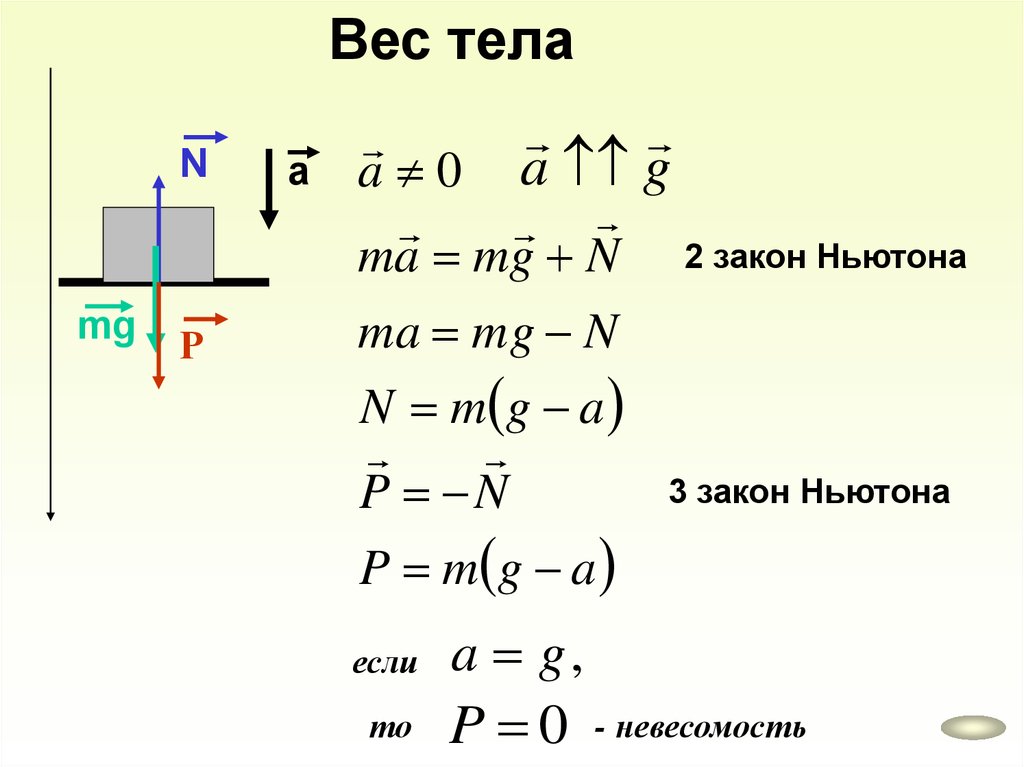
59.
Вес телаN
mg
Р
a
a 0 a g
ma mg N 2 закон Ньютона
ma mg N
N m g a
P N
P m g a
если
то
3 закон Ньютона
a g,
P 0 - невесомость
60.
Na
mg
Р
Вес тела
a 0 a g
ma mg N
ma N mg
N m g a
P N
P m g a
2 закон Ньютона
3 закон Ньютона
Перегрузка – явление увеличения веса тела.
m g a g a
k
- коэффициент перегрузки
mg
g
61.
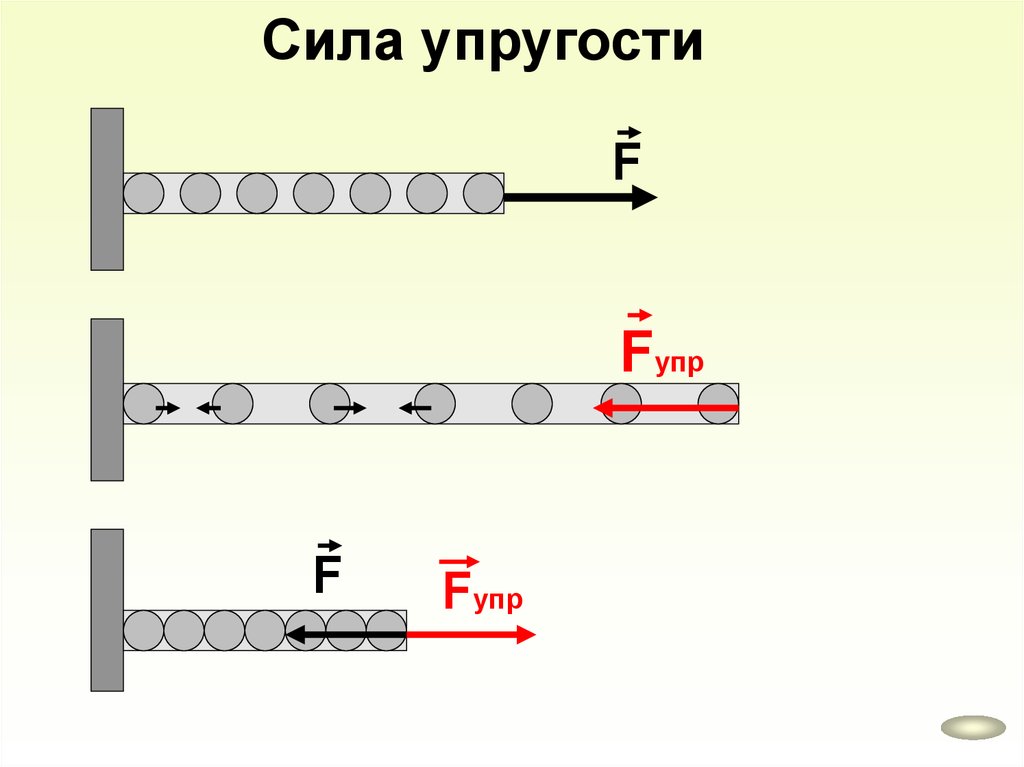
Сила упругостиF
Fупр
F
Fупр
62.
Закон ГукаF
L0
L -
абсолютное удлинение.
L м
Fупр
L
Fупр k L
k – жесткость
Н
k
м
L
L0
- относительное
удлинение
63.
Закон ГукаF
S
- механическое напряжение
Н
2 Па
м
пч - предел прочности – максимальное
механическое
напряжение, которое выдерживает данное
вещество
Е
1660 г.
Е – модуль Юнга
Е Па
64.
Закон ГукаFL0
L
ES
Fупр kx
F Fупр
ES
k
L0
k1
k2
k1
k2
k k1 k2
k1k 2
k
k1 k 2
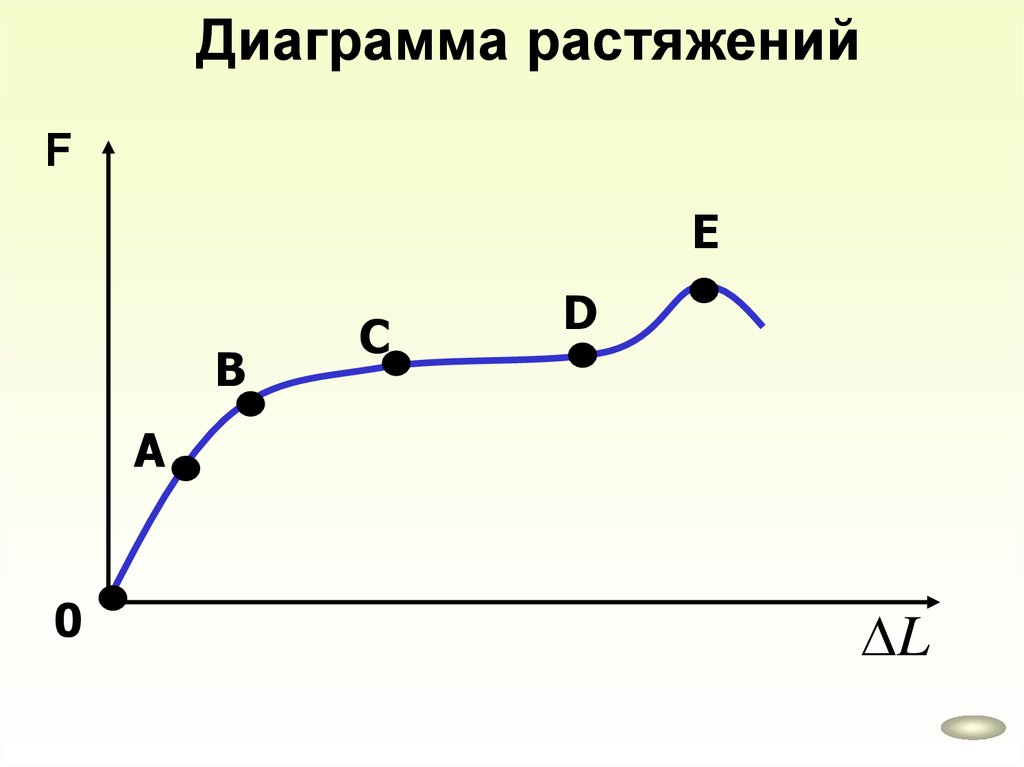
65.
Диаграмма растяженийF
Е
В
С
D
А
0
L
66.
Сила тренияN
Fтяги
Fтр
mg
Cилу трения, действующую между двумя телами,
неподвижными относительно друг друга называют
силой трения покоя.
Наибольшее значение силы трения, при котором
скольжение еще не наступает, называется
максимальной силой трения покоя.
Fтр. max N
Сила трения не зависит от площади соприкосновения
тел.
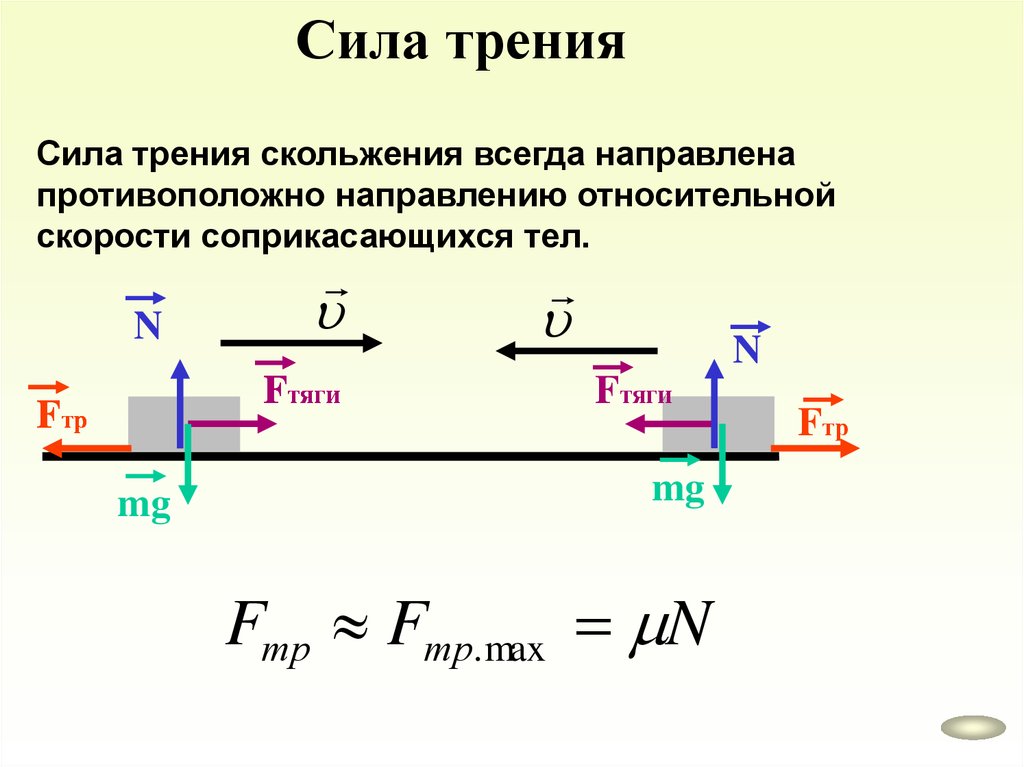
67.
Сила тренияСила трения скольжения всегда направлена
противоположно направлению относительной
скорости соприкасающихся тел.
N
Fтяги
Fтр
mg
N
Fтяги
mg
Fтр Fтр.max N
Fтр
68.
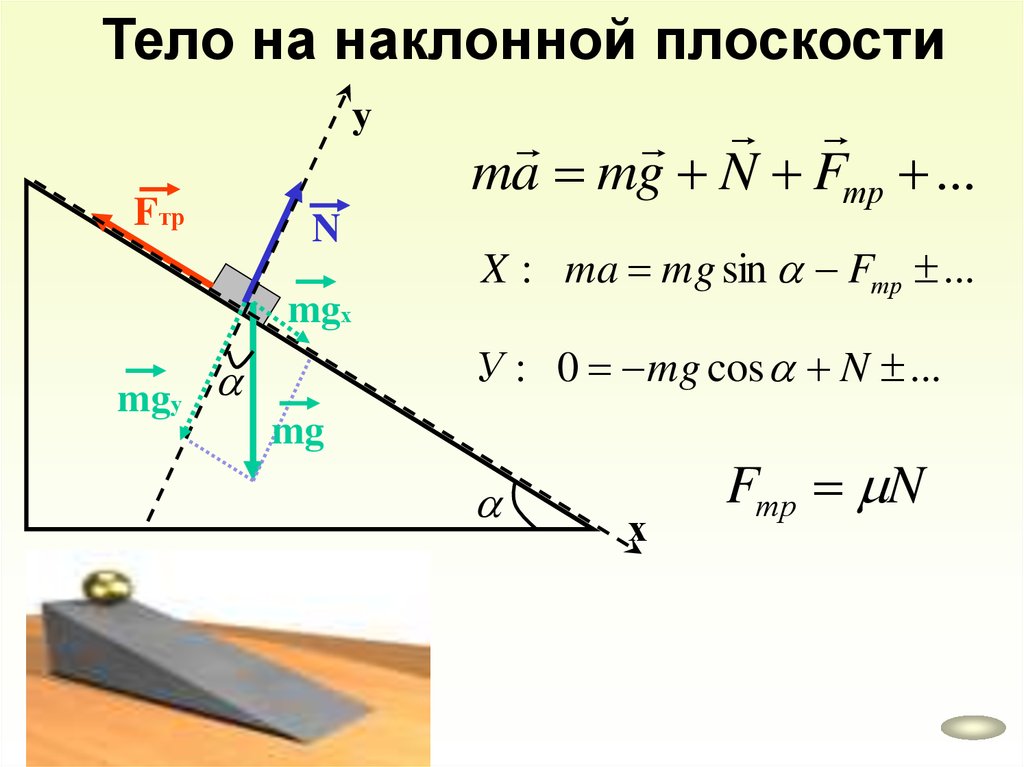
Тело на наклонной плоскостиу
ma mg N Fтр ...
Fтр
N
mgх
mgу
X : ma mg sin Fтр ...
У : 0 mg cos N ...
mg
х
Fтр N
69.
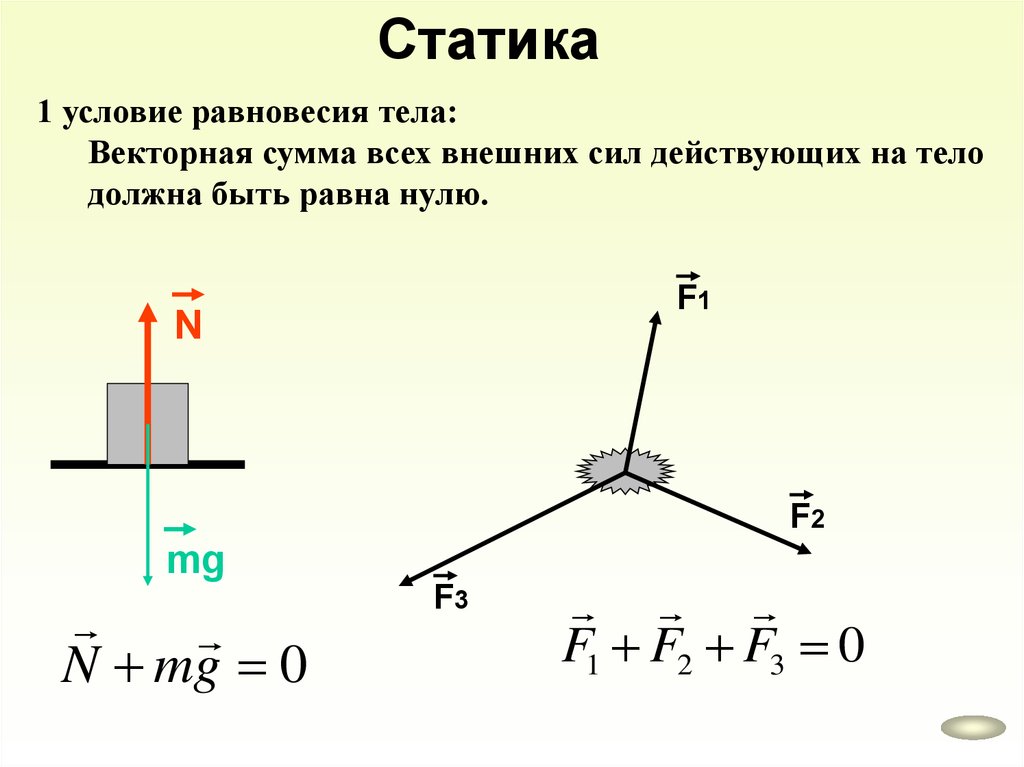
Статика1 условие равновесия тела:
Векторная сумма всех внешних сил действующих на тело
должна быть равна нулю.
F1
N
F2
mg
N mg 0
F3
F1 F2 F3 0
70.
СтатикаЕсли тело имеет ось вращения, то:
F1
0
F2
F1 F2
F1 F2 0
1 условия недостаточно
71.
СтатикаМомент силы – это величина, равная произведению
модуля силы на плечо силы.
M F d
M H м
F1
d1
d2 0
F2
Плечо силы (d) –
кратчайшее
расстояние от линии
действия силы до оси
вращения.
72.
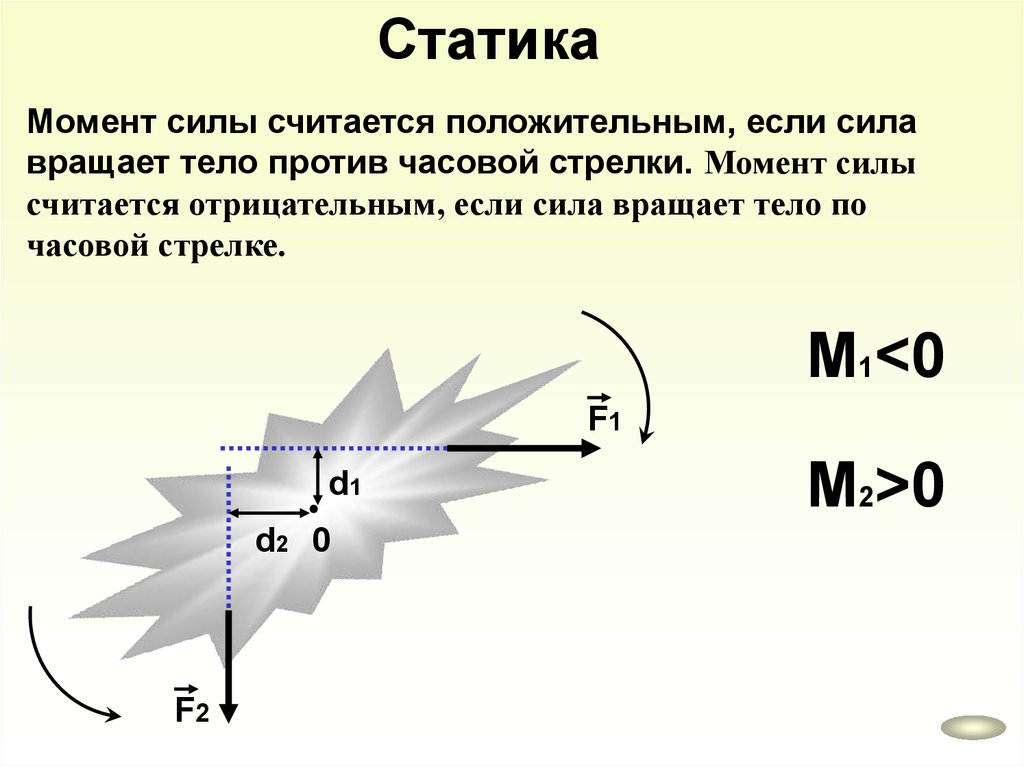
СтатикаМомент силы считается положительным, если сила
вращает тело против часовой стрелки. Момент силы
считается отрицательным, если сила вращает тело по
часовой стрелке.
М1<0
F1
d1
d2 0
F2
М2>0
73.
Статика2 условие равновесия тела:
Сумма моментов сил действующих на тело должна
быть равна нулю.
F1
d1
d2 0
M1 M 2 0
M1 0
F2
M2 0
F1d1 F2 d 2 0
74.
ИмпульсF
a
m
0
a
t
Ft m m o
Ft - импульс силы
P m - импульс тела
Ft P P0
Ft P
Ft Н с
кг м
P
с
кг м
кг м
Н с 2 с
с
с
75.
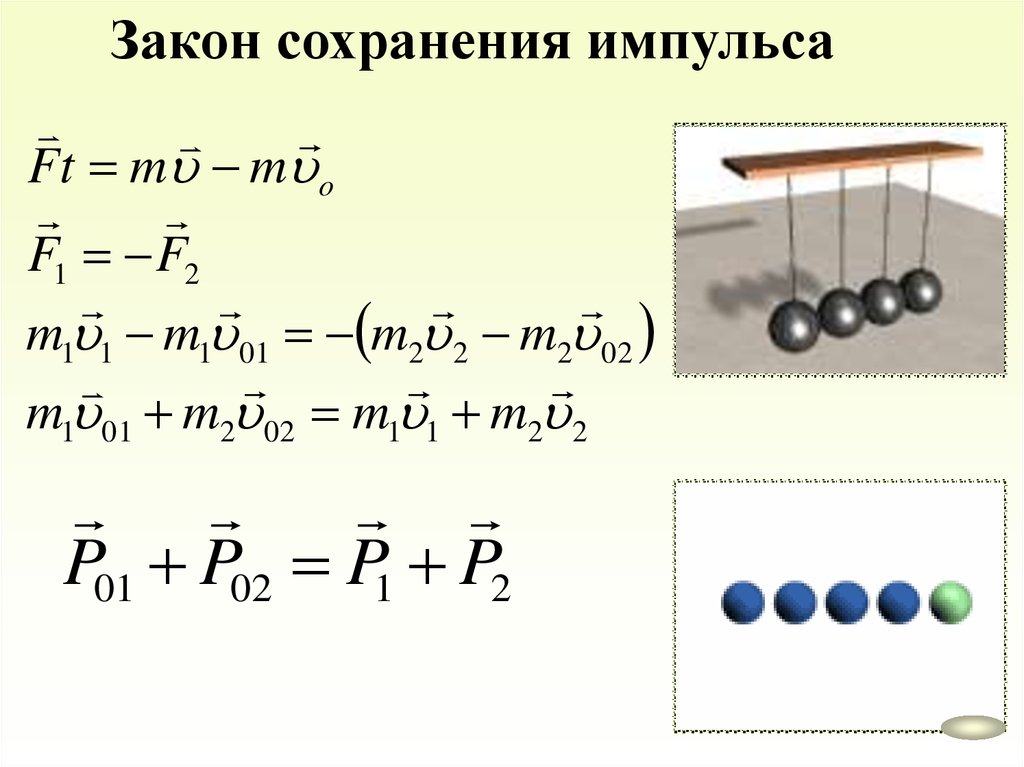
Закон сохранения импульсаFt m m o
F1 F2
m1 1 m1 01 m2 2 m2 02
m1 01 m2 02 m1 1 m2 2
P01 P02 P1 P2
76.
Закон сохранения импульсаm1 01 m2 02 m1 1 m2 2
P01 P02 P1 P2
упругий удар
77.
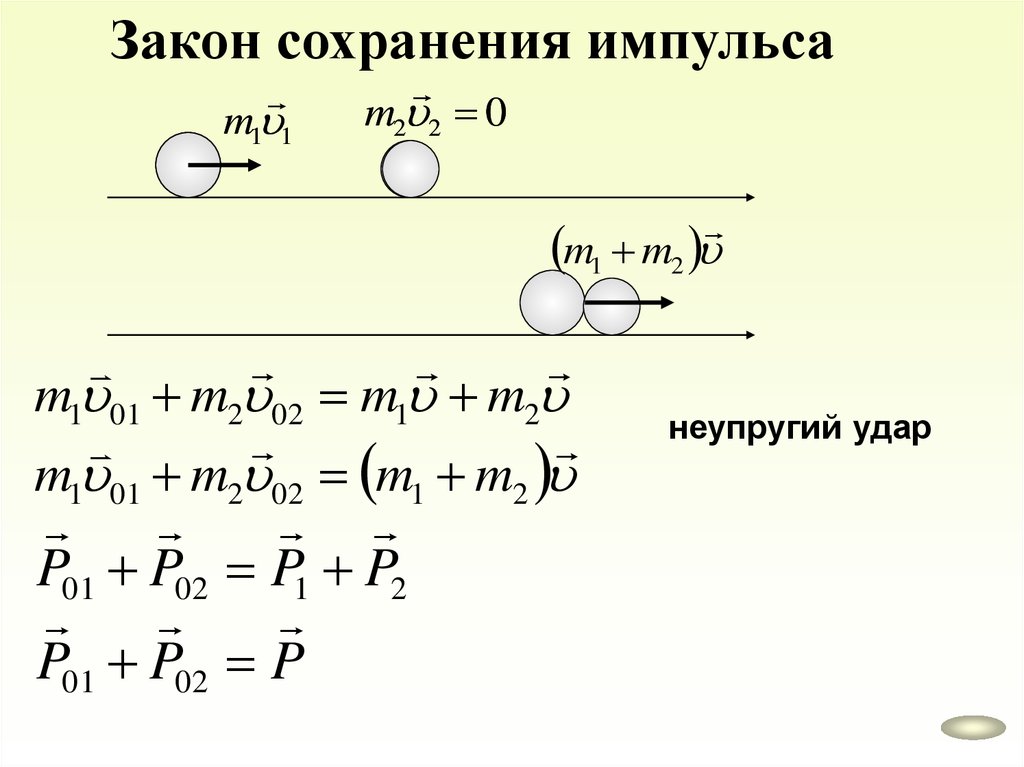
Закон сохранения импульсаm1 1
m2 2 0
m1 m2
m1 01 m2 02 m1 m2
m1 01 m2 02 m1 m2
P01 P02 P1 P2
P01 P02 P
неупругий удар
78.
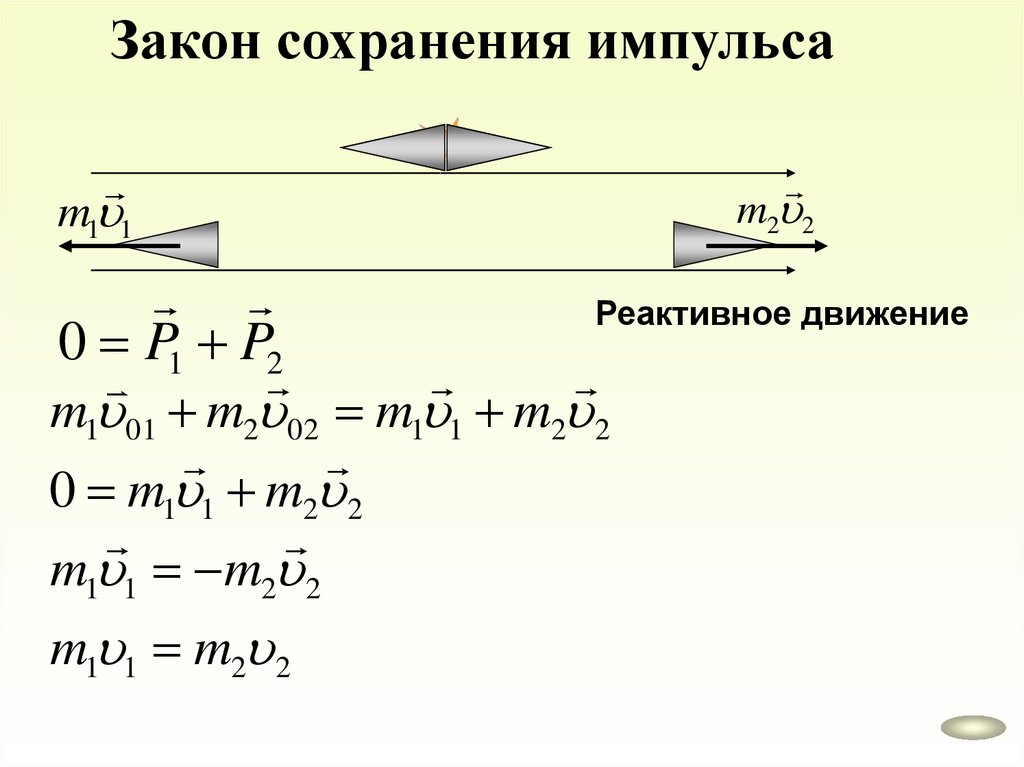
Закон сохранения импульсаm1 1
m2 2
Реактивное движение
0 P1 P2
m1 01 m2 02 m1 1 m2 2
0 m1 1 m2 2
m1 1 m2 2
m1 1 m2 2
79.
Закон сохранения импульсаmn n mn mц
m
n
mц
2
2
mn mц gh
80.
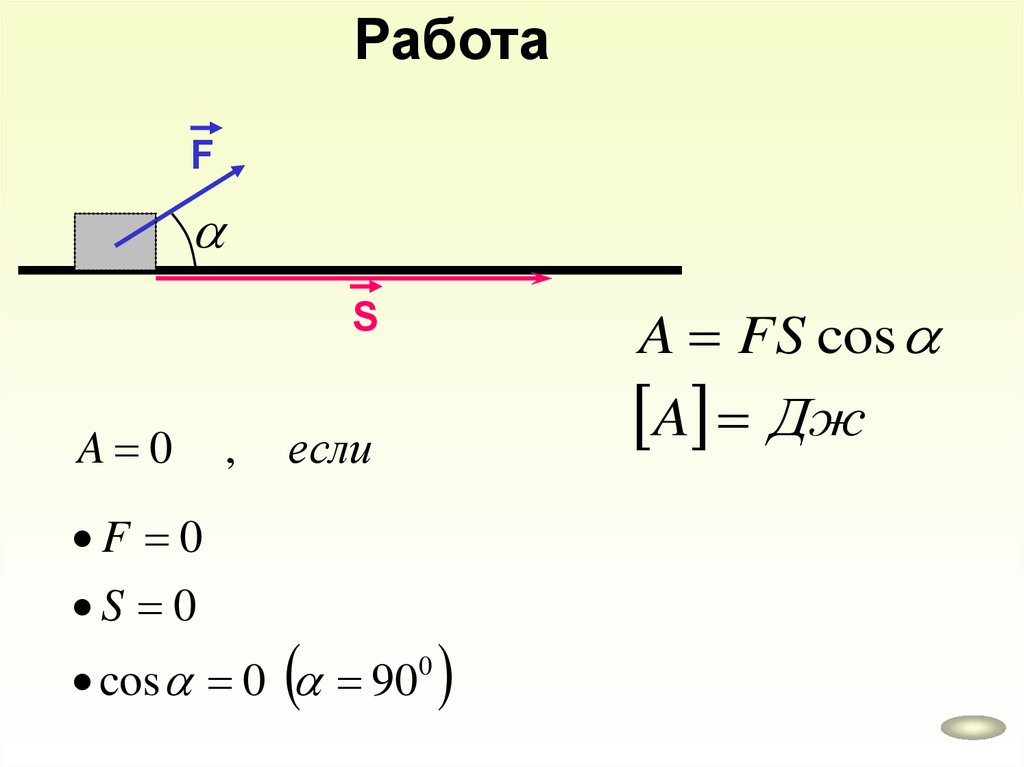
РаботаF
A FS cos
A Дж
S
A 0
,
если
F 0
S 0
cos 0 90
0
81.
МощностьA
N
t
N Вт
A FS cos
FS cos F ср cos
N
t
t
82.
ЭнергияЕсли тело или система тел могут совершить работу, то
говорят, что они обладают энергией.
Энергия
потенциальная
кинетическая
(энергия движения)
Е Дж
(энергия взаимодействия)
m 2
Ek
2
тело поднято
над
поверхностью
Земли
En mgh
тело
деформировано
kx
En
2
2
83.
Кинетическая энергияF
A FS cos
1
F
2
F ma
x
0
S
S
A ma
2a
cos 1
2
2
2a
A Ek 2 Ek 1
A Ek
22 12
2
1
m
m
2
2
2
2
2
1
84.
Потенциальная энергияA FS cos
mg
h h1
F mg
S h h1 h2
h2
cos 1
A mg h1 h2 mgh1 mgh2
A En1 En 2 En 2 En1
A En
85.
Работа силы тяжестиРабота силы тяжести не зависит от траектории
движения тела, а только от начального и конечного
положения тела.
h
hн
hк
A Aгор Aверт
A F S cos
Aгор mg х 0 0
Аверт mg (h1 h2 ... hn ) 1
Aверт mg h
h h1 h2 ... hn
86.
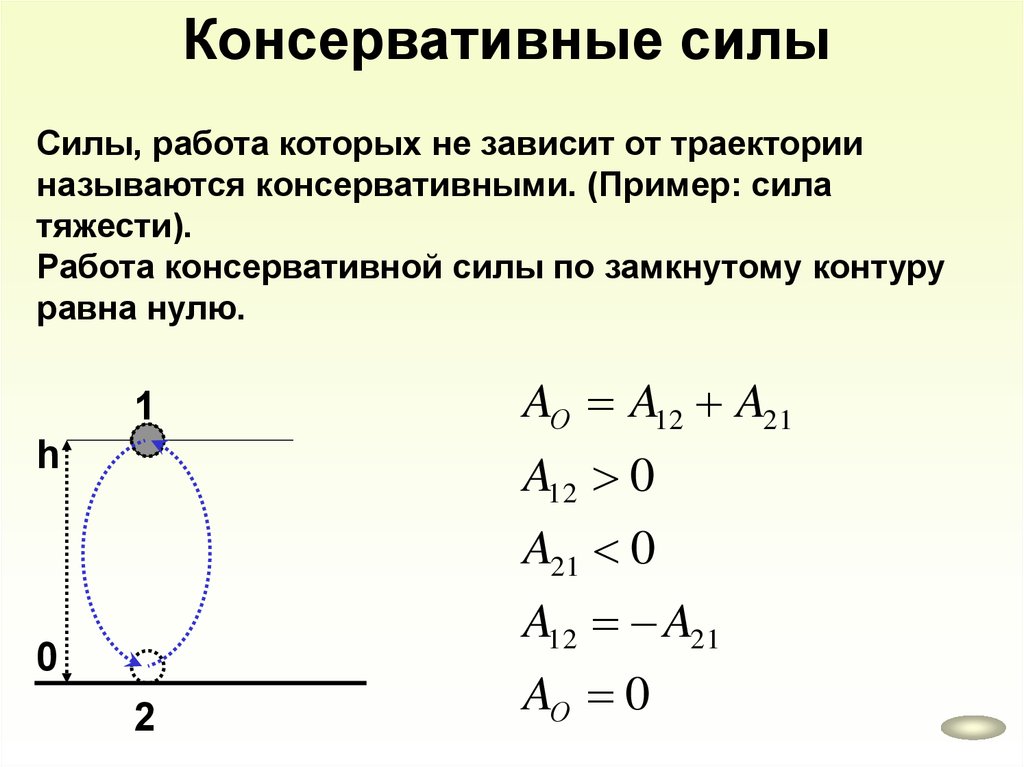
Консервативные силыСилы, работа которых не зависит от траектории
называются консервативными. (Пример: сила
тяжести).
Работа консервативной силы по замкнутому контуру
равна нулю.
1
h
AО A12 A21
A12 0
A21 0
A12 A21
0
2
AО 0
87.
Потенциальная энергияFУ1
FУ2
Х2
Х
Х1
A FS cos
F kx
S x x1 x2
cos 1
0
F1 F2 k x1 x2
Fср
2
2
k x1 x2
x1 x2
A
2
k x12 x22 kx12 kx22
A
2
2
2
A En1 En 2 En 2 En1
A En
88.
Закон сохранения энергииA Ek
A En
Ek En
Ek 2 Ek1 ( En 2 En1 )
Ek1 En1 Ek 2 En 2
E
до
Епосле
- закон сохранения энергии
для замкнутой системы, в
которой действуют только
консервативные силы.
89.
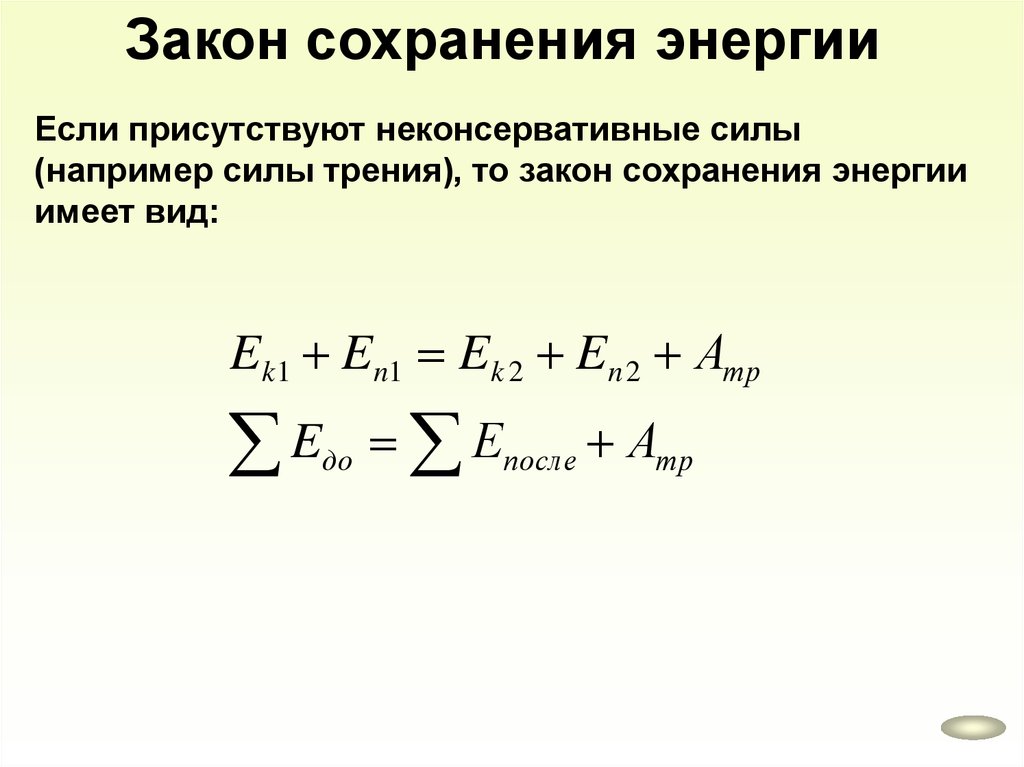
Закон сохранения энергииЕсли присутствуют неконсервативные силы
(например силы трения), то закон сохранения энергии
имеет вид:
Ek1 En1 Ek 2 En 2 Атр
E
до
Епосле Атр