



 Электроника
ЭлектроникаПохожие презентации:

")








Цифровой прибор (ЦП)
1.
Цифровой прибор (ЦП)Отличается от АЦП тем, что выходная информация – ЧЭ N должен быть
представлен в виде удобном для восприятия человеком – оператором. Это
накладывает особенности и на характеристики прибора:
1) N – индикация, как правило, в удобном для нас десятичном коде. При этом
характеристика N(x) должна быть линейной, а выходной эквивалент N должен быть
представлен желательно в единицах измеряемой величины;
2) в силу ограниченности, человеческого восприятия частота смены выходной
информации не может быть высокой (не > 10 Гц);
3) цифровые приборы, как правило, выполняются многопредельными с ручным или
автоматическим переключением диапазона.
Т.о. АЦП и ЦП имеют ряд отличий, но принципы преобразования, источники
погрешности, методы проектирования этих двух групп существенно совпадают.
Поэтому везде далее будем рассматривать некий обобщенный класс ЦИП – цифровых
измерительных преобразователей включающий АЦП и ЦП.
Конкретные особенности устройства можно учесть в процессе
схемотехнического проектирования.
2.
3. Цифро-аналоговый преобразователь (ЦАП)Предназначен для преобразования входной дискретной величины в аналоговый сигнал А, или этом А – это
непрерывная функция N => по определению выходная аналоговая величина А на выходе ЦАП всегда дискретна.
ЦАП является самостоятельным устройством или может входить в состав сложных АЦП. Таким образом
рассматривается 2 вида устройств: АЦП и ЦП.
Имеется разница и в подходах проектирования ЦП и АЦП. ЦП строится под конкретную задачу, поэтому
для получения оптимальных результатов их приходится проектировать полностью – от выбора метода преобразования
до получения схемотехнического решения.
ЦАП, как правило, самостоятельно не проектируются хотя бы в силу того, что они должны производиться
по типовым, интегральным высокотехнологическим технологиям. Поэтому от разработчика требуется не
спроектировать ЦАП, а грамотно использовать существующие ЦАП в интегральном исполнении. Поэтому изучение
ЦП и ЦАП будет производиться в разном объеме и с разными подходами. В основном будем рассматривать ЦИП, а
ЦАП будем только изучать, с точки зрения методов, погрешностей, особенностей измерения.
3.
Погрешности ЦП• Пусть требуется преобразовать измеряемую величину х в ЧЭ N. Зависимость N = f(ai, x) называется
градуировочной характеристикой, статической характеристикой или уравнением преобразования.
f – непрерывная функция
ai – конструктивные параметры преобразователи.
i = 1,n, n – число параметров.
Пример 1: Пусть требуется выработать ЧЭ N частоты fx.
Суть метода: берется интервал времени tф=cost и определяется сколько периодов измерительной
частоты укладывается в этом интервале времени, т.е.
4.
Погрешность квантованияВ идеале измеряемой величине х должен соответствовать числовой
эквивалент N. Фактически, параметры преобразователя аi отличаются от
номинальных значений, в результате статическая характеристика изменяется.
Вместо числового эквивалента N будет вырабатываться NП – числовой
эквивалент преобразователя.
Величина
ΔN = Nп-N
это и есть погрешность преобразования в единицах числового эквивалента.
Т.о., в процессе преобразования всегда появляется погрешность ΔN.
При квантовании возникает погрешность ΔNкв – это один из основных
источников погрешности. Случайным образом распределена в интервале -1< ΔNкв<1
числового эквивалента.
Погрешность квантования – важнейшая из составляющих суммарной
погрешности цифрового преобразователя. ЦП без погрешностей квантования не
бывает. По значению ΔNкВ является доминирующей и требования по уменьшению
этой погрешности до заданного значения должно выполняться в первую очередь.
5.
Аддитивная и мультипликативнаяпогрешности
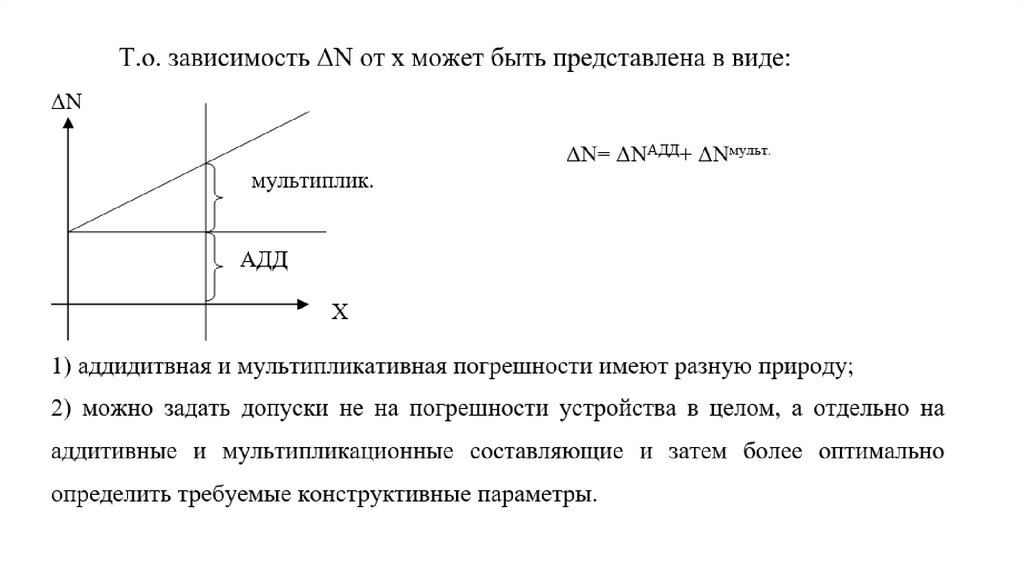
По характеру все погрешности делятся на 2 составляющие:
1) аддитивная составляющая – это составляющая, которая не зависит от измеряемой величины
Х.
Погрешность квантования всегда относится к аддитивной составляющей
(-1<ΔNкв<1).
2) мультипликативная – это составляющая, которая пропорциональна измеряемой величине.
Т.о. зависимость ΔN от х может быть представлена в виде:
6.
7.
Уменьшение погрешности квантования8.
9.
Синхронизация с использованием генератора опорной частоты скварцевой стабилизацией
10.
Масштабные ограниченияПусть требуется разработать преобразователь реализующий
характеристику N = f(ai; x). Часто к характеристикам преобразователя
предъявляются дополнительные требования, называемые масштабными
ограничениями.
Существует
3
варианта
масштабирования
преобразователя:
1. ЦИП является АЦП. В этом случае вырабатываемый код должен
быть однозначно связан с измеряемой величиной, но других
ограничений на характеристику не накладывается.
2. Реализуется ЦИП, у которого имеется индикация. Требуется
выработать N в единицах измеряемой величины х.
Суть масштабных ограничений в том, чтобы потребителю
измерительной информации было удобно эту информацию
воспринимать и обрабатывать. Чаще всего масштабные ограничения
накладываются на ЦИП. Выработанная информация должна быть
представлена в десятичном коде и в единицах измеряемой величины.
11.
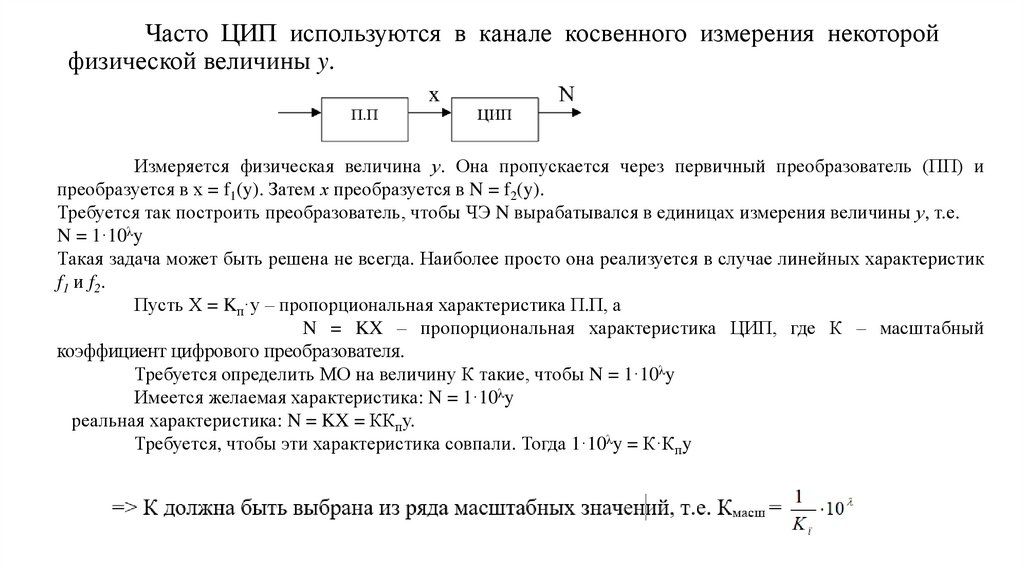
Часто ЦИП используются в канале косвенного измерения некоторойфизической величины y.
Измеряется физическая величина у. Она пропускается через первичный преобразователь (ПП) и
преобразуется в х = f1(y). Затем х преобразуется в N = f2(y).
Требуется так построить преобразователь, чтобы ЧЭ N вырабатывался в единицах измерения величины у, т.е.
N = 1·10λy
Такая задача может быть решена не всегда. Наиболее просто она реализуется в случае линейных характеристик
f 1 и f 2.
Пусть Х = Kп·у – пропорциональная характеристика П.П, а
N = KX – пропорциональная характеристика ЦИП, где К – масштабный
коэффициент цифрового преобразователя.
Требуется определить МО на величину К такие, чтобы N = 1·10λy
Имеется желаемая характеристика: N = 1·10λy
реальная характеристика: N = KX = ККпу.
Требуется, чтобы эти характеристика совпали. Тогда 1·10λy = К·Кпy
12.
Выводы:В АЦП на параметры преобразователя масштабные
ограничения не накладываются.
Если имеется индикация, и требуется выработать N в
заданных единицах, то на параметры преобразователя обязательно
накладываются дополнительные масштабные ограничения.
13.
Пример масштабных ограничений14.
Преобразователи интервалов времени ипериодов
ПИВ – преобразователь интервалов времени.
ПП – преобразователь периодов.
Предназначены
для
выработки
числового
эквивалента,
пропорционального интервалу времени tх или периоду Тх.
ПИВ: N = Ktx
ПП: N = KTx.
Отличие в том, что tx – это единичная величина, а Tx –
периодически изменяющаяся величина. Тем не менее, методы
преобразования, источники погрешности, методика схемотехнического
проектирования, способы расчета одинаковы. Отличаются лишь
схемотехническим исполнением.
15.
ПИВ (преобразователи интервалов времени)ПИВ должен вырабатывать ЧЭ N = ktx.
Метод преобразования. Уравнение преобразования
Выбирается эталонная квантующая частота fк = const
стабилизированная. Это означает, что нам известен Tk – const. Тогда
N определяется подсчетом количества периодов квантующей
частоты укладывающихся в интервал времени tx:
16.
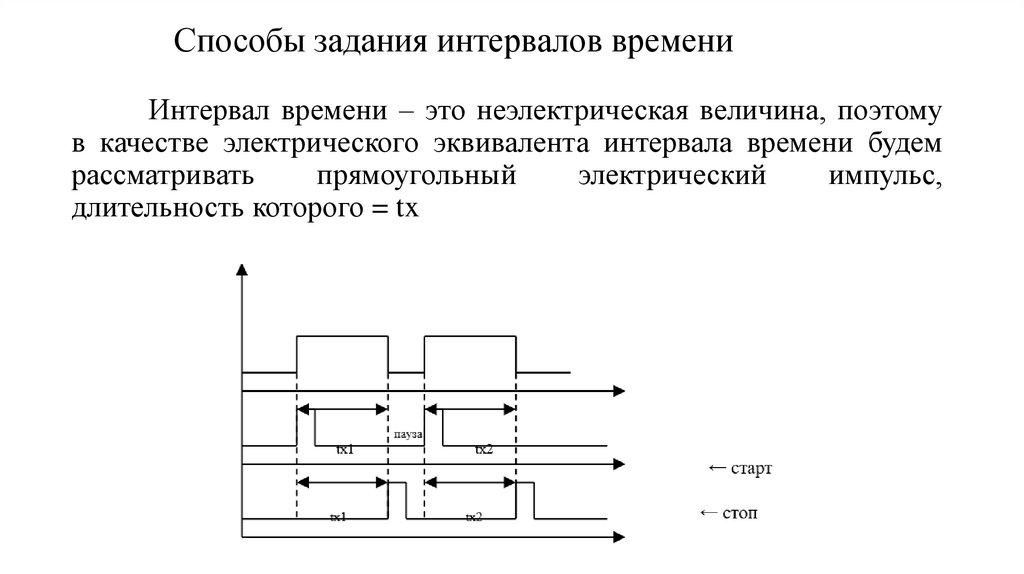
Способы задания интервалов времениИнтервал времени – это неэлектрическая величина, поэтому
в качестве электрического эквивалента интервала времени будем
рассматривать
прямоугольный
электрический
импульс,
длительность которого = tx
17.
В дальнейшем будем работать с прямоугольными импульсами αхдлительность которых = tx. При этом между двумя последующими
обрабатываемыми импульсами должна быть пауза для выполнения
преобразованием служебных операций.
Возможно задание ИВ – ни и в других видах. Например в виде
сигналов старт – стоп, где αх1 – старт, αх – стоп, которые обозначают начало и
конец измеряемого ИВ. В любом случае в старт-стопных устройствах можно
преобразовать входную информацию к стандартному виду - прямоугольному
импульсу αх длительностью tx.
18.
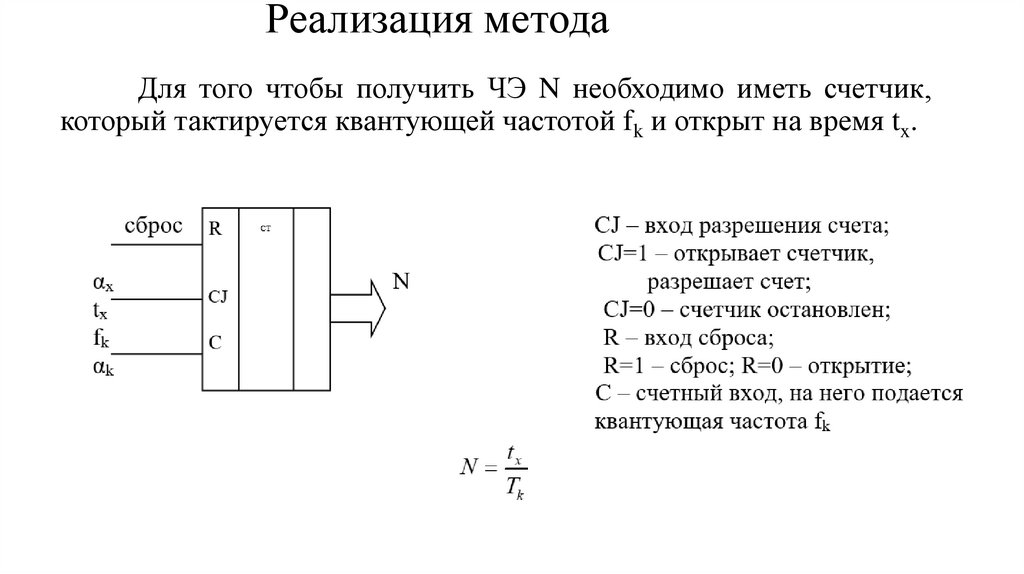
Реализация методаДля того чтобы получить ЧЭ N необходимо иметь счетчик,
который тактируется квантующей частотой fk и открыт на время tx.
19.
Счетчик в исходном состоянии сигналом сброса Rустанавливается в «0». Затем по входу разрешения счета СJ счетчик
открывается на время tx. По счетному входу С счетчик тактируется
сигналами αк квантующей частоты fк. После окончания tx счетчик
закрывается. Т.о. на каждый tx в счетчик записывается 1 импульс.
В реальных условиях управление счетчиком производится
обычно с помощью узла управления (УУ), который и вырабатывает
сигналы на входе СJ. В некоторых случаях можно обойтись без СJ
управляя открытием счетчика по входу сброса R.