




















































































































 Физика
Физика Механика
МеханикаПохожие презентации:



")



 механика. Статика")


Теоретическая механика. Модель 1
1.
Модуль 1.М
Е
Х
А
Н
И
К
А
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Раздел 1. Статика
Раздел 2. Кинематика
Раздел 3. Динамика точки
Раздел 4. Общие теоремы динамики
Раздел 5. Аналитическая механика
2.
МЕХАНИКАТеоретическая механика.
Модуль 1
Раздел 1 – СТАТИКА
ВВЕДЕНИЕ В СТАТИКУ
УСЛОВИЯ РАВНОВЕСИЯ
ЦЕНТР ТЯЖЕСТИ
ЛЕКЦИЯ 1
ЛЕКЦИЯ 4
ЛЕКЦИЯ 6
ЛЕКЦИЯ 2
ЛЕКЦИЯ 5
ЛЕКЦИЯ 3
3. ЛЕКЦИЯ 1 План:
МЕХАНИКА1.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
Введение в статику
ЛЕКЦИЯ 1
План:
1.1 Основные понятия и определения.
1.2. Аксиомы статики.
1.3. Связи и их реакции
4. Введение в статику
1.2Введение в статику
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Статика - раздел механики, в котором излагается
общее учение о силах и условиях равновесия
материальных тел, находящихся под действием сил.
Равновесие - это состояние покоя тела по
отношению к другим телам, например по отношению к
Земле.
Абсолютно твердое тело - такое тело,
расстояние между каждыми двумя точками которого
всегда остается постоянным.
5. Введение в статику
1.3Введение в статику
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Сила в механике – это величина,
являющаяся основной мерой
механического взаимодействия
материальных тел.
Действие силы на тело
определяется:
линия
действия
силы
- модулем силы;
- направлением вектора силы;
- точкой приложения вектора
силы.
Основная единица измерения силы - 1
ньютон (1 Н).
6. Введение в статику
1.4ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Система сил - совокупность сил, действующих на
рассматриваемое тело
Системы сил
Плоские (линии действия всех сил
лежат в одной плоскости)
Пространственные (линии
действия сил не лежат в
одной плоскости)
Параллельные (линии действия сил параллельны
друг другу)
Произвольные (линии действия сил не пересекаются
и не параллельны)
Сходящиеся (линии действия сил пересекаются
в одной точке)
7. Введение в статику
1.5Введение в статику
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Эквивалентными называются две системы сил,
приводящие тело к одному и тому же кинематическому
состоянию.
Уравновешенная (эквивалентная нулю) – это такая
система сил, под действием которой свободное твердое
тело может находиться в покое.
Равнодействующей системы сил, называется
сила, эквивалентная данной системе сил.
Сила, приложенная к телу в какой-нибудь одной его точке,
называется сосредоточенной.
Силы, действующие на все точки объема или части
поверхности тела, называются распределенными.
8. Введение в статику
1.6Введение в статику
АКСИОМЫ СТАТИКИ
1. Если на свободное абсолютно твердое
тело действуют две силы, то тело
может находиться в равновесии тогда и
только тогда, когда эти силы равны по
модулю (F1 = F2) и направлены вдоль
одной прямой в противоположные
стороны
2. Действие данной системы сил на абсолютно твердое тело не
изменяется, если к ней прибавить или от нее отнять уравновешенную
.
систему сил
Следствие: действие силы на абсолютно твердое тело не
изменится, если перенести точку приложения силы вдоль ее
линии действия в любую другую точку тела.
9. Введение в статику
1.7Введение в статику
АКСИОМЫ СТАТИКИ
3. Закон параллелограмма сил: две силы, приложенные к телу в
одной точке, имеют равнодействующую, приложенную в той же
точке и изображаемую диагональю параллелограмма,
построенного на этих силах, как на сторонах
R F1 F2
10. Введение в статику
1.8Введение в статику
АКСИОМЫ СТАТИКИ
4. Закон равенства действия и
противодействия: при всяком
действии одного материального
тела на другое имеет место
такое же численно, но
противоположное по направлению
противодействие, т.е.
5. Принцип отвердевания: равновесие изменяемого (деформируемого)
тела, находящегося под действием уравновешенной системы сил,
возможно только при его «отвердевании»
11. Введение в статику
1.9Введение в статику
СВЯЗИ И ИХ РЕАКЦИИ
Свободным называется тело, которое может совершать
из данного положения любые перемещения в пространстве
Несвободным называется тело, перемещениям которого в
пространстве препятствуют какие-нибудь другие, скрепленные
или соприкасающиеся с ним, тела (связи)
Реакция связи – это сила, с которой связь действует на
тело, препятствуя его перемещениям, называется.
Принцип освобождаемости от связей: всякое
несвободное тело можно рассматривать как свободное, если
действие связей заменить их реакциями, приложенными к данному
телу
12. Введение в статику
1.10Введение в статику
СВЯЗИ И ИХ РЕАКЦИИ
Гладкая
поверхность
Гибкая связь
Шарнирный
стержень
13. Введение в статику
1.11Введение в статику
СВЯЗИ И ИХ РЕАКЦИИ
Шарнирно-неподвижная опора
Цилиндрический шарнир
Шарнирноподвижная опора
Жесткая заделка
14. ЛЕКЦИЯ 2 План:
МЕХАНИКА2.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
Введение в статику
ЛЕКЦИЯ 2
План:
2.1. Проекции сил.
2.2. Момент силы относительно точки и
относительно оси.
2.3. Пара сил, момент пары
15. Введение в статику
2.2Введение в статику
ПРОЕКЦИИ СИЛ
Проекция силы на ось - алгебраическая величина,
равная произведению модуля силы на косинус угла между
силой и положительным направлением оси:
Fx = Fcos = ab;
Qx= Qcos 1=
= -Qcos = -de
Px = 0
16. Введение в статику
2.3Введение в статику
ПРОЕКЦИИ СИЛ
Проекция силы на плоскость это вектор , заключенный
между проекциями начала и конца силы на эту плоскость
17. Введение в статику
2.4Введение в статику
ПРОЕКЦИИ СИЛ
Силу можно задавать ее проекциями Fx, Fy, Fz
на координатные оси:
F Fx2 Fy2 Fz2
F Fx2 Fy2 Fz2
cos Fx / F ,
/ F
Fx, / F ,
cos cos
F
y
/ F
y / F,
cos cos
F
F
z
cos Fz / F
18. Введение в статику
2.5СПОСОБЫ СЛОЖЕНИЯ И
РАЗЛОЖЕНИЯ СИЛ
Введение в статику
1. Сложение двух сил
Величину, равную геометрической сумме сил системы,
называют главным вектором этой системы сил
R F1 F2
R F12 F22 2F1F2 cos
19. Введение в статику
2.6Введение в статику
СПОСОБЫ СЛОЖЕНИЯ И
РАЗЛОЖЕНИЯ СИЛ
2. Сложение системы сил
n
R F1 F2 Fn Fk
i 1
20. Введение в статику
2.7Введение в статику
Аналитический способ сложения сил
R Rx2 R y2 Rz2 ;
Rx = Fkx;
Ry = Fky;
Rz = Fkz
cos Rx / R ,
cos Ry / R ,
cos Rz / R.
Разложение сил
F F1 F2
F
21. Введение в статику
2.8Введение в статику
Момент силы относительно точки
Векторный момент силы относительно
центра О - это приложенный в центре О
вектор
m0 ( F ) r F
где OA r - радиус-вектор точки А,
проведенный из центра О.
Алгебраический момент силы
относительно центра
m0( F
) = ± F h.
m0( P
) = P h1, m0( Q) = - Q h2
22. Введение в статику
2.9Введение в статику
Момент силы относительно оси
- это момент проекции вектора силы на плоскость
перпендикулярную оси относительно точки пересечения
оси с этой плоскостью
mz ( F ) Fxy h
23. Введение в статику
2.10Введение в статику
Пара сил, момент пары
Плоскость действия пары - плоскость, проходящая
через линии действия сил пары
Алгебраический момент пары
m=±Fd
Плечо пары d - кратчайшее расстояние между
линиями действия сил пары
Векторный момент пары - это вектор m ,
направленный перпендикулярно плоскости действия
пары в ту сторону, откуда пара видна стремящейся
повернуть тело против хода часовой стрелки
Этот вектор называется скользящим
24. ЛЕКЦИЯ 3 План:
МЕХАНИКА3.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
Введение в статику
ЛЕКЦИЯ 3
План:
3.1. Теорема о параллельном переносе силы.
3.2. Приведение системы сил к центру. Главный
вектор и главный момент системы сил
25. Введение в статику
3.2Введение в статику
Теорема о параллельном переносе силы
Силу, приложенную к абсолютно твердому телу, можно,
не изменяя её действия, переносить из данной точки в
новый произвольный центр, прибавляя при этом пару с
моментом, равным моменту переносимой силы
относительно нового центра
26. Введение в статику
3.3Введение в статику
Приведение системы сил к центру
( F1 , F2 ,...,Fn ) ( F1' , F2' ,...,Fn ' ) (m1 ,m2 ,...,mn )
F1 F1 , и т д.
m1 m0 ( F1) и тт.д
( F1 , F2 ,...,Fn ) R ,M o
.
R Fk
M 0 m0 ( Fk )
R - главный вектор системы сил;
M 0 - главный момент системы сил
относительно центра О
27. Введение в статику
3.4Введение в статику
Приведение системы сил к центру
Частные случаи приведения системы сил к центру:
R 0
данная система сил приводится к одной паре сил
M0 0
R 0
M0 0
данная система сил приводится к одной силе, т. е.
к равнодействующей
R 0
M0 0
данная система сил будет уравновешенной
28. ЛЕКЦИЯ 4 План:
МЕХАНИКА4.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
Условия равновесия
ЛЕКЦИЯ 4
План:
4.1. Теорема Вариньона.
4.2. Условия равновесия различных систем сил.
29.
Условия равновесия4.2
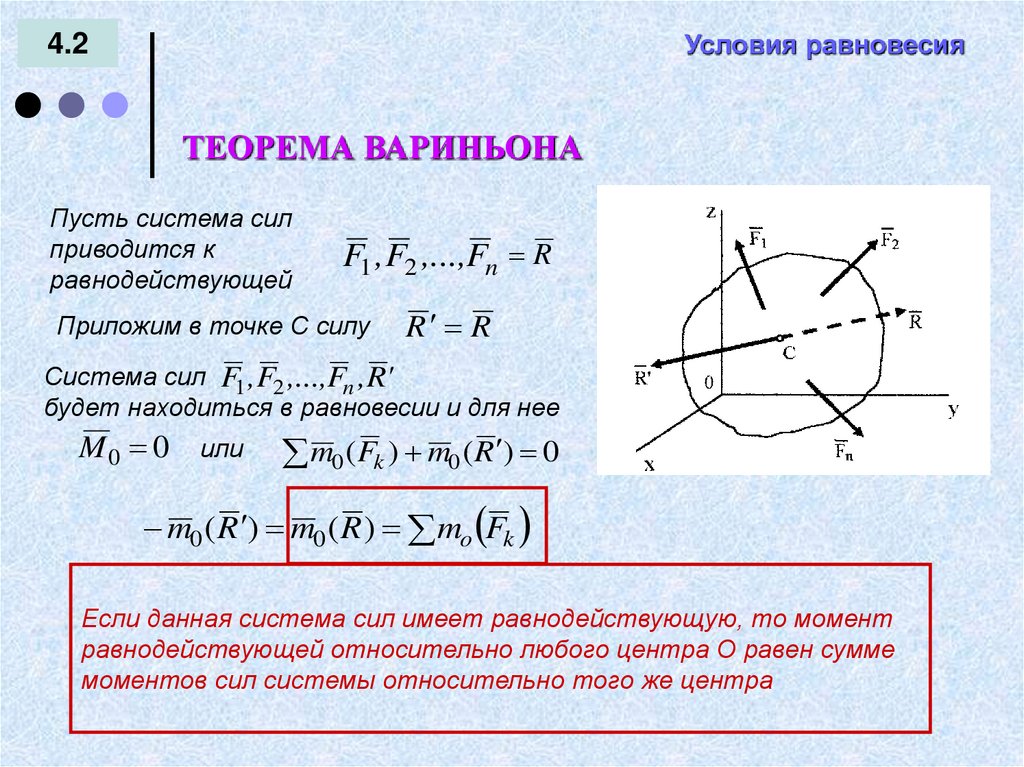
ТЕОРЕМА ВАРИНЬОНА
Пусть система сил
приводится к
равнодействующей
F1 , F2 ,...,Fn R
Приложим в точке С силу
R R
Система сил F1 , F2 ,...,Fn , R'
будет находиться в равновесии и для нее
M 0 0 или
m0 ( Fk ) m0 ( R ) 0
m0 ( R ) m0 ( R ) mo Fk
Если данная система сил имеет равнодействующую, то момент
равнодействующей относительно любого центра О равен сумме
моментов сил системы относительно того же центра
30.
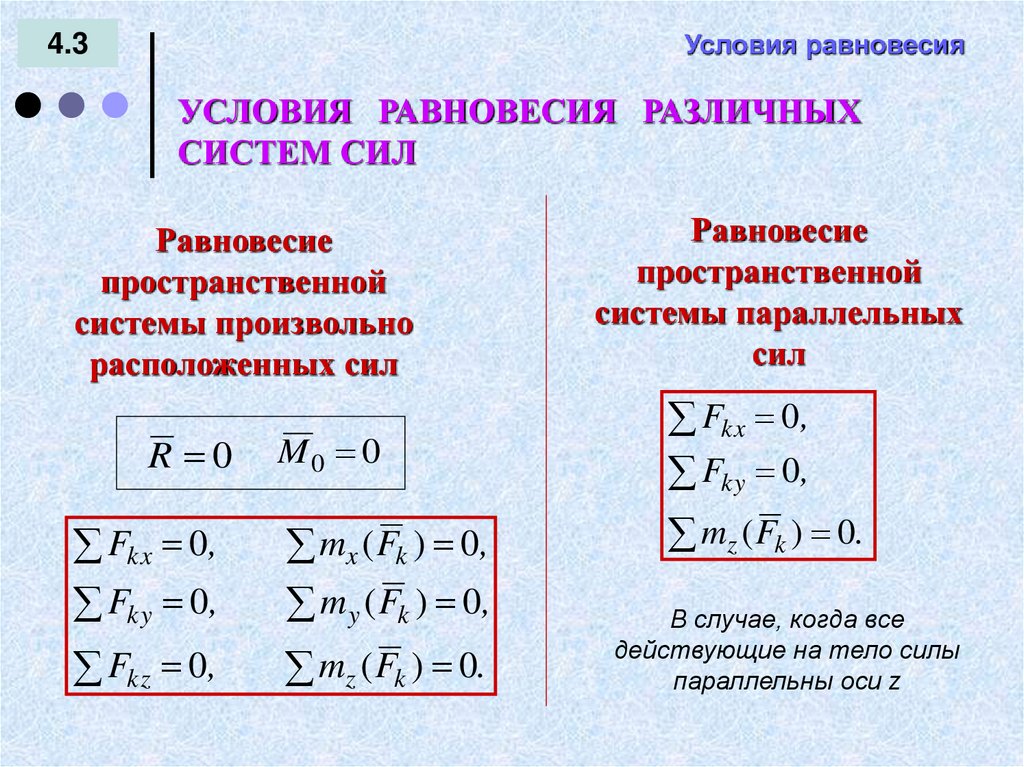
Условия равновесия4.3
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ
СИСТЕМ СИЛ
Равновесие
пространственной
системы произвольно
расположенных сил
R 0
M0 0
Fkx 0,
Fky 0,
mx ( Fk ) 0,
m y ( Fk ) 0,
Fkz 0,
mz ( Fk ) 0.
Равновесие
пространственной
системы параллельных
сил
Fkx 0,
Fky 0,
mz ( Fk ) 0.
В случае, когда все
действующие на тело силы
параллельны оси z
31.
Условия равновесия4.4
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ
СИСТЕМ СИЛ
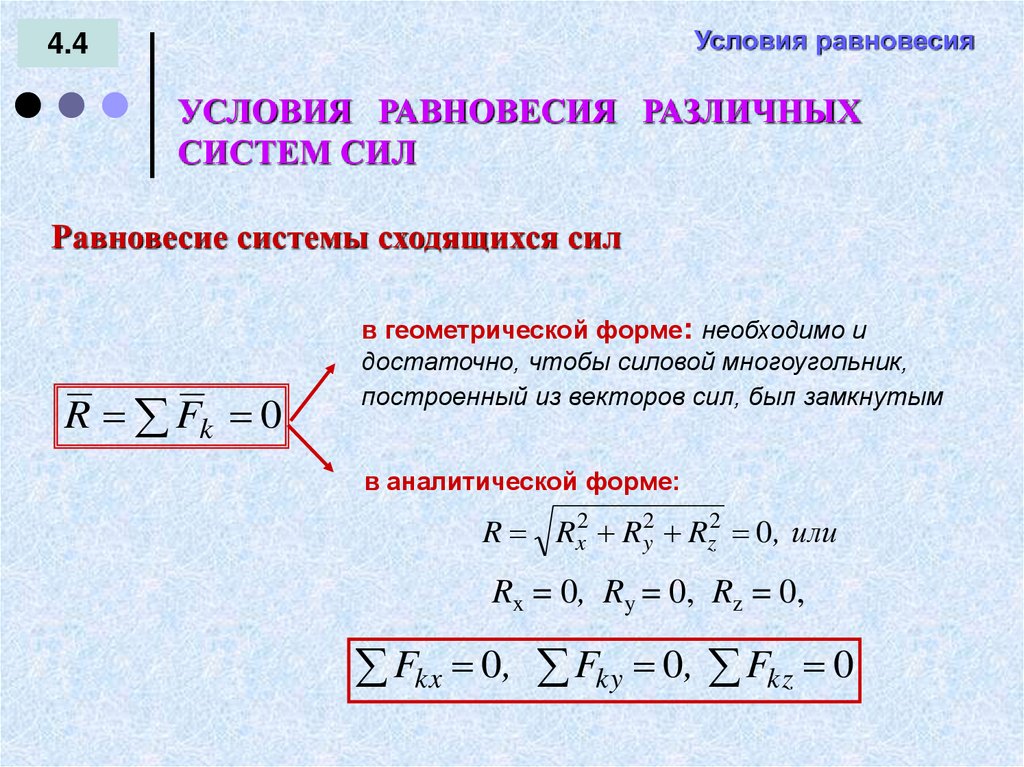
Равновесие системы сходящихся сил
R Fk 0
в геометрической форме: необходимо и
достаточно, чтобы силовой многоугольник,
построенный из векторов сил, был замкнутым
в аналитической форме:
R Rx2 Ry2 Rz2 0, или
Rx = 0, Ry = 0, Rz = 0,
Fkx 0, Fky 0, Fkz 0
32.
4.5Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ
СИСТЕМ СИЛ
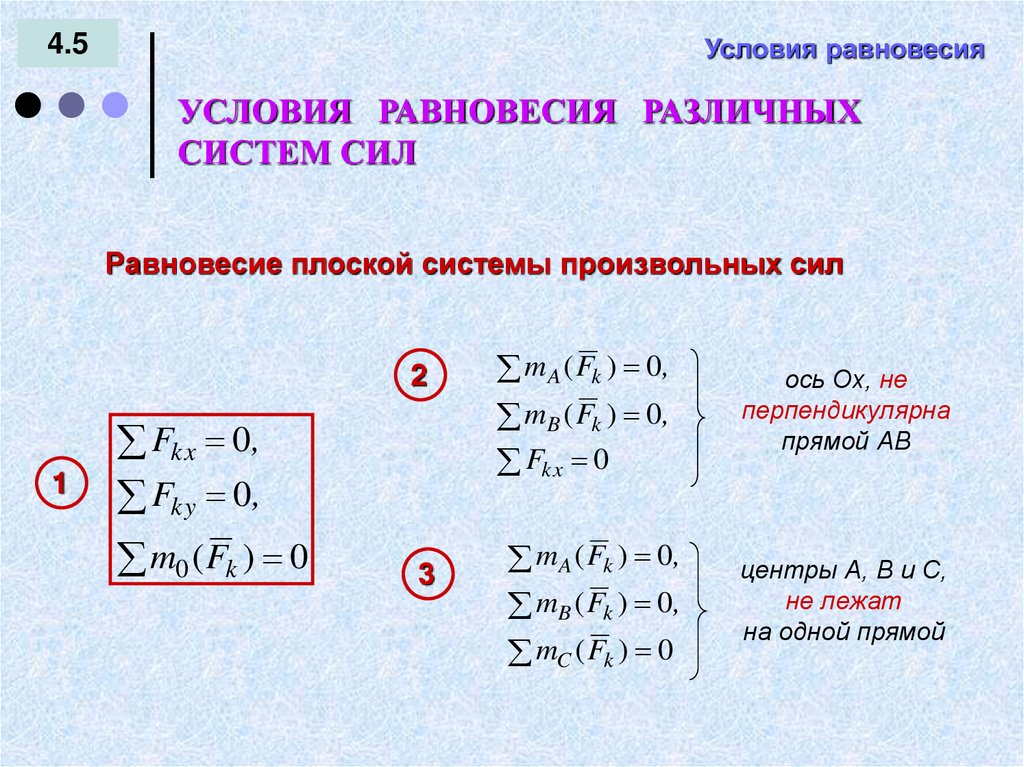
Равновесие плоской системы произвольных сил
2
1
Fkx 0,
Fky 0,
m0 ( Fk ) 0
3
m A ( Fk ) 0,
mB ( Fk ) 0,
Fkx 0
ось Ох, не
перпендикулярна
прямой АВ
m A ( Fk ) 0,
mB ( Fk ) 0,
mC ( Fk ) 0
центры А, В и С,
не лежат
на одной прямой
33.
4.6Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ
СИСТЕМ СИЛ
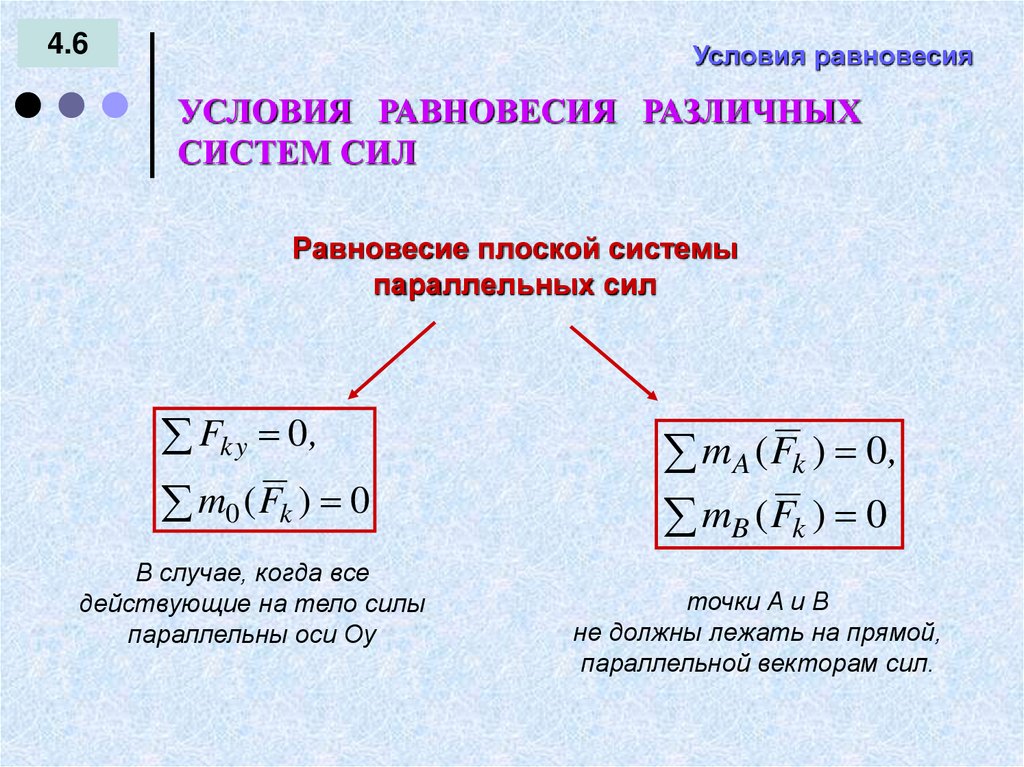
Равновесие плоской системы
параллельных сил
Fky 0 ,
m0 ( Fk ) 0
В случае, когда все
действующие на тело силы
параллельны оси Оу
m A ( Fk ) 0,
mB ( Fk ) 0
точки A и В
не должны лежать на прямой,
параллельной векторам сил.
34. ЛЕКЦИЯ 5 План:
МЕХАНИКА5.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
Условия равновесия
ЛЕКЦИЯ 5
План:
5.1. Равновесие систем тел.
5.2. Равновесие тела при наличии трения
35.
5.2Условия равновесия
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Внутренние связи – это связи, соединяющие части конструкции
Два способа решения задач
на равновесие составной конструкции:
1 способ. Рассматривают равновесие всей конструкции как единое
целое (не учитывая реакции внутренних связей) и дополнительно
равновесие какой-нибудь одной или нескольких частей конструкции
с учетом реакций внутренних связей.
2 способ. Конструкцию расчленяют на части и рассматривают
равновесие каждой части, учитывая при этом реакции внутренних
связей. При этом реакции внутренних связей будут попарно равны
по модулю и противоположны по направлению.
36.
Условия равновесия5.3
РАВНОВЕСИЕ ТЕЛ ПРИ
НАЛИЧИИ ТРЕНИЯ
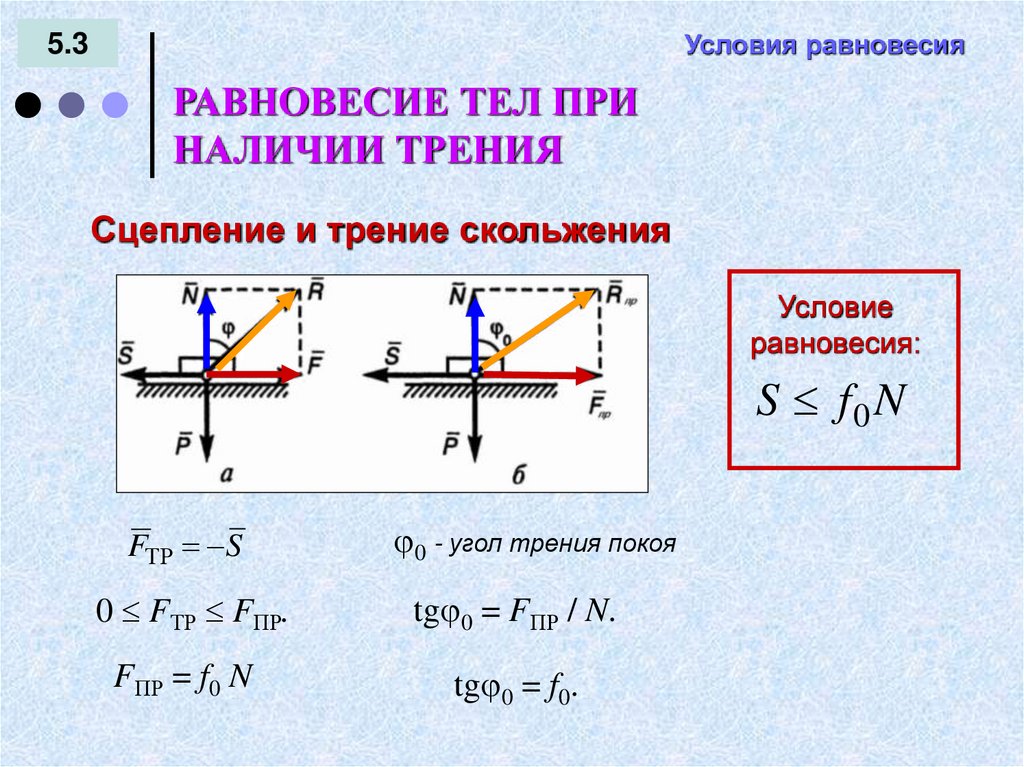
Сцепление и трение скольжения
Условие
равновесия:
S f0 N
FТР S
0 - угол трения покоя
0 FТР FПР.
tg 0 = FПР / N.
FПР = f0 N
tg 0 = f0.
37.
Условия равновесия5.4
РАВНОВЕСИЕ ТЕЛ ПРИ
НАЛИЧИИ ТРЕНИЯ
Трение качения
mA ( Fk ) 0
N QПР R 0
QПР = ( /R) N.
Условие равновесия:
Q N
R
( Q , F ) – пара сил
( N
P ) – пара сил
Q f0 N
38. ЛЕКЦИЯ 5 План:
МЕХАНИКА6.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
СТАТИКА
ЦЕНТР ТЯЖЕСТИ
ЛЕКЦИЯ 5
План:
6.1. Центр параллельных сил
6.2. Центр тяжести твердого тела
39.
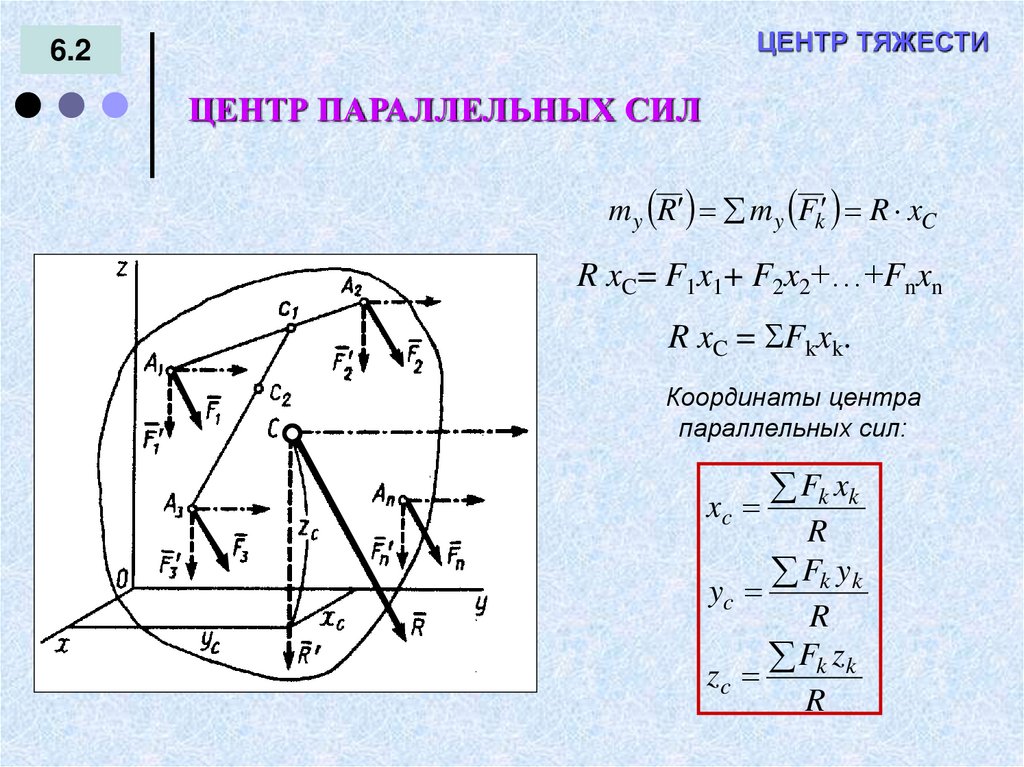
ЦЕНТР ТЯЖЕСТИ6.2
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
m y R m y Fk R xC
R xC= F1x1+ F2x2+…+Fnxn
R xC = Fkxk.
Координаты центра
параллельных сил:
xc
Fk xk
R
Fk yk
yc
R
Fk zk
zc
R
40.
ЦЕНТР ТЯЖЕСТИ6.3
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Силовое поле – это область, в которой на
каждую материальную точку действует сила,
зависящая от положения этой точки,
Поле тяжести вблизи земной поверхности
можно назвать однородным полем тяжести.
Модуль равнодействующей сил тяжести
называется весом тела Р
Координаты центра тяжести:
хС
рk xk
Р
yC
рk yk
Р
zC
рk zk
Р
41.
ЦЕНТР ТЯЖЕСТИ6.4
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Центр тяжести некоторых однородных тел
1 Для однородного объемного твердого тела (вес пропорционален
объему):
V x
х k k
С
V
V y
y k k
C
V
Vk zk
z
C
V
2. Для тела, представляющего собой однородную пластину (вес
пропорционален площади):
Sk xk
х
С
S
S k yk
y
C
S
S k zk
zC
S
3. Координаты центра тяжести тонкого прямого стержня (вес
пропорционален длине):
lk xk
х
С
L
lk yk
y
C
L
lk zk
zC
L
42.
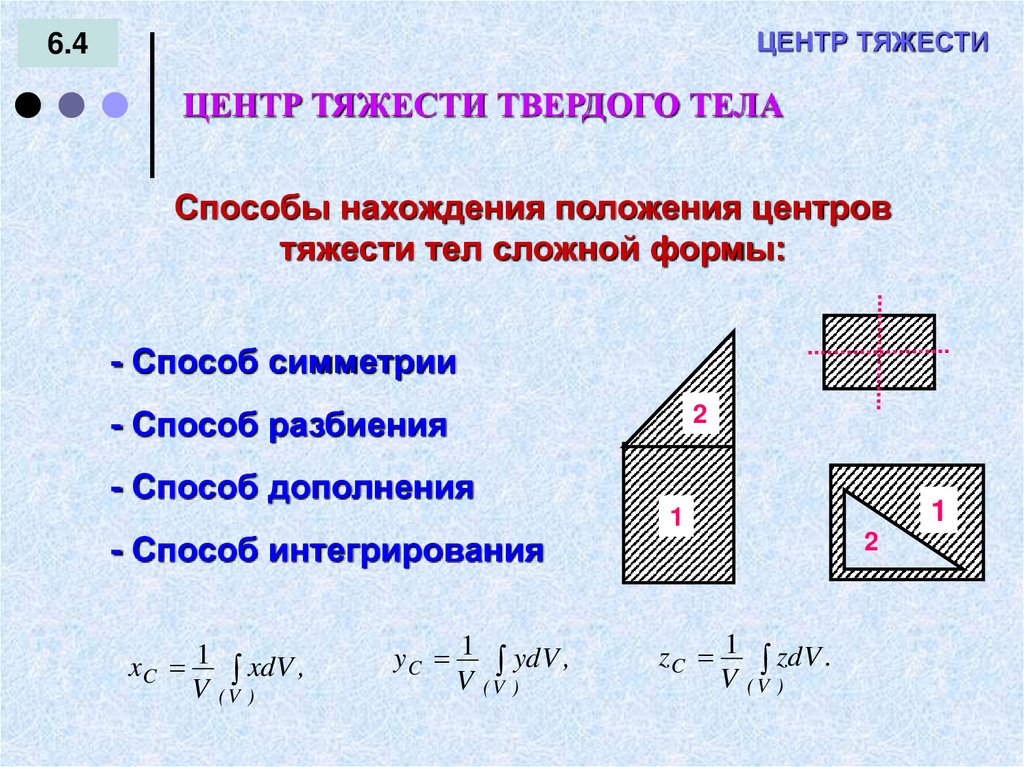
ЦЕНТР ТЯЖЕСТИ6.4
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Способы нахождения положения центров
тяжести тел сложной формы:
- Способ симметрии
2
- Способ разбиения
- Способ дополнения
- Способ интегрирования
x C 1 xdV ,
V (V )
y C 1 ydV ,
V (V )
1
1
2
z C 1 zdV .
V (V )
43.
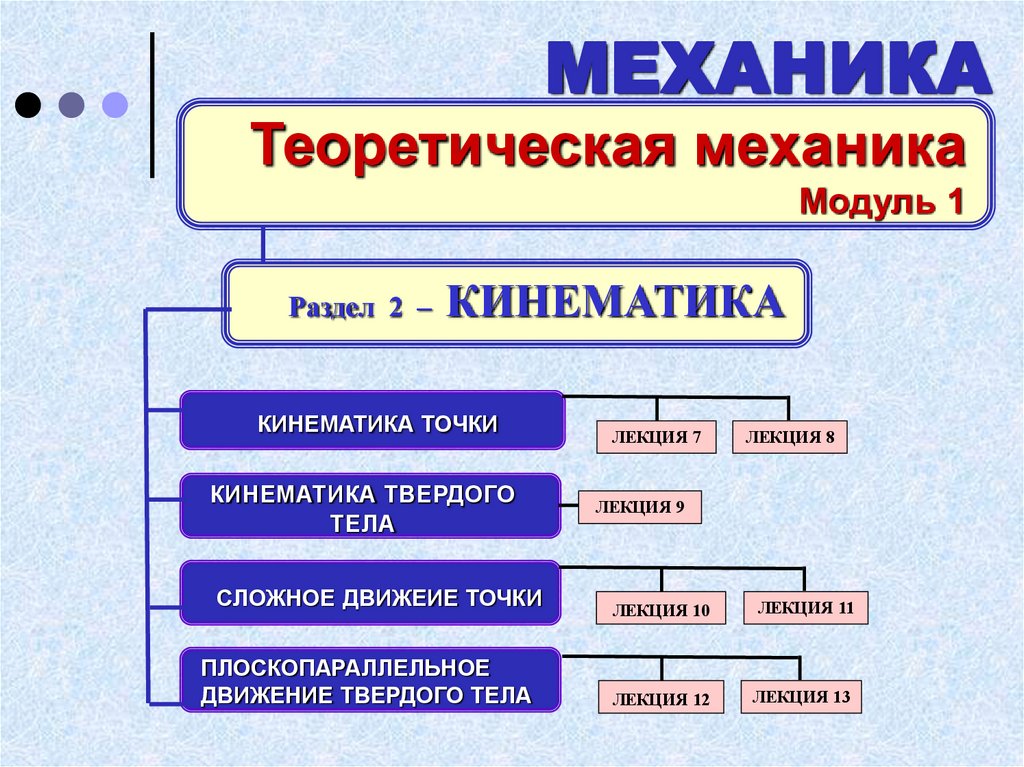
МЕХАНИКАТеоретическая механика
Модуль 1
Раздел 2 – КИНЕМАТИКА
КИНЕМАТИКА ТОЧКИ
КИНЕМАТИКА ТВЕРДОГО
ТЕЛА
СЛОЖНОЕ ДВИЖЕИЕ ТОЧКИ
ПЛОСКОПАРАЛЛЕЛЬНОЕ
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
ЛЕКЦИЯ 7
ЛЕКЦИЯ 8
ЛЕКЦИЯ 9
ЛЕКЦИЯ 10
ЛЕКЦИЯ 11
ЛЕКЦИЯ 12
ЛЕКЦИЯ 13
44. ЛЕКЦИЯ 7 План:
МЕХАНИКА7.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
Кинематика точки
ЛЕКЦИЯ 7
План:
7.1. Векторный способ задания движения точки.
7.2. Координатный способ задания движения
45.
7.2КИНЕМАТИКА ТОЧКИ
Кинематикой
называется раздел механики, в котором
изучаются геометрические свойства движения тел без учета их
инертности и действующих на них сил.
Траекторией точки называется непрерывная линия,
которую описывает движущаяся точка относительно данной
системы отсчета.
Для задания движения точки можно применять способы:
- векторный;
- координатный;
- естественный.
46.
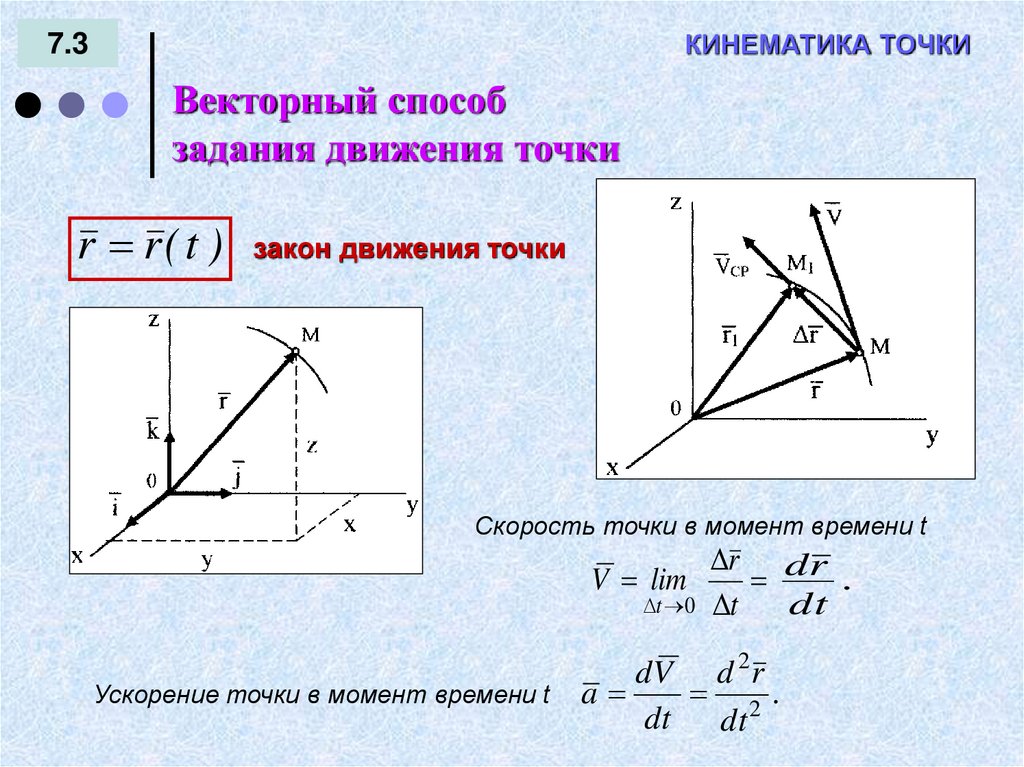
КИНЕМАТИКА ТОЧКИ7.3
Векторный способ
задания движения точки
r r ( t ) закон движения точки
Скорость точки в момент времени t
r dr
.
t 0 t
dt
V lim
Ускорение точки в момент времени t
dV d 2 r
a
2.
dt
dt
47.
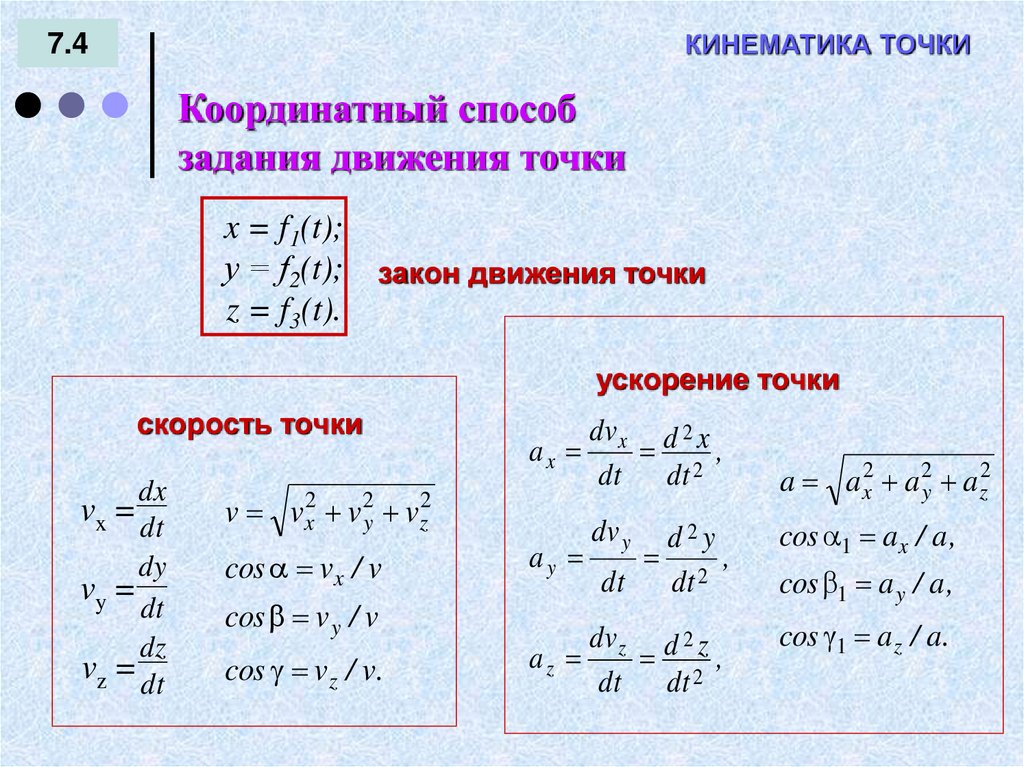
КИНЕМАТИКА ТОЧКИ7.4
Координатный способ
задания движения точки
x = f1(t);
у = f2(t); закон движения точки
z = f3(t).
ускорение точки
скорость точки
dx
vx = dt
dy
vy =
dt
dz
vz = dt
v vx2 v 2y vz2
cos vx / v
cos v y / v
cos vz / v.
dv x d 2 x
,
2
dt dt
a a x2 a 2y a z2
dv y
d2y
ay
,
2
dt
dt
cos 1 a x / a ,
dv z d 2 z
az
,
2
dt dt
cos 1 a z / a .
ax
cos 1 a y / a ,
48. ЛЕКЦИЯ 8 План:
МЕХАНИКА8.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
Кинематика точки
ЛЕКЦИЯ 8
План:
8.1. Естественный способ задания движения точки.
8.2. Частные случаи движения точки
49.
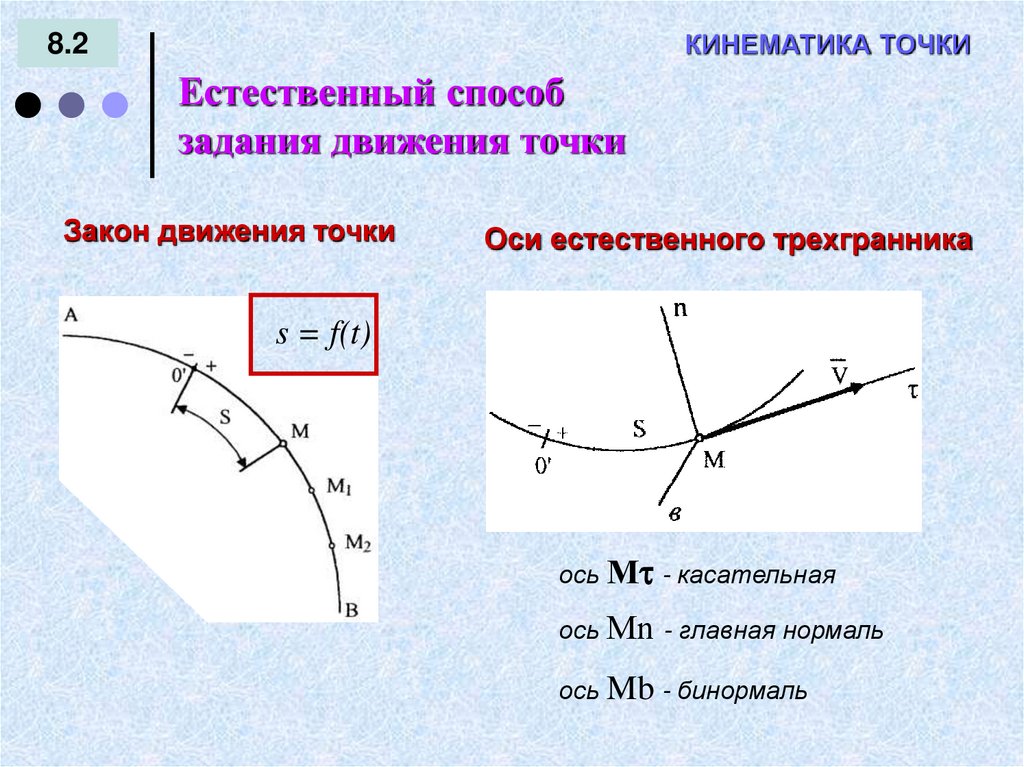
КИНЕМАТИКА ТОЧКИ8.2
Естественный способ
задания движения точки
Закон движения точки
Оси естественного трехгранника
s = f(t)
ось М - касательная
ось Мn - главная нормаль
ось Mb - бинормаль
50.
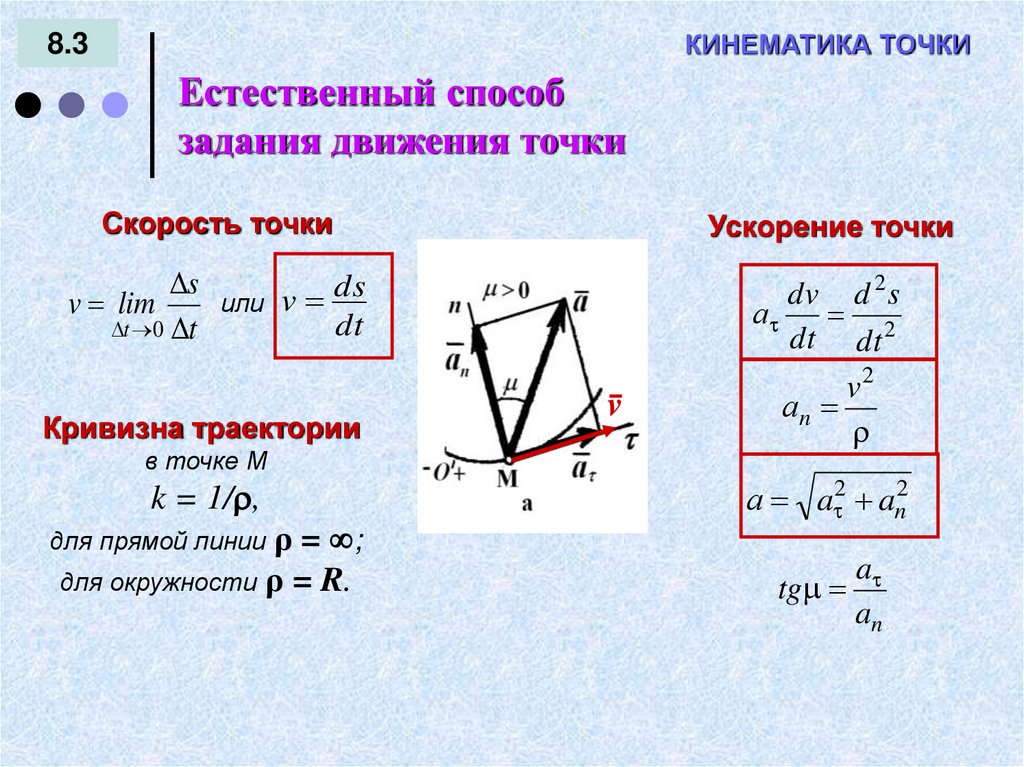
КИНЕМАТИКА ТОЧКИ8.3
Естественный способ
задания движения точки
Скорость точки
Ускорение точки
s
ds
или v
v lim
dt
t 0 t
dv d 2 s
а
2
dt dt
Кривизна траектории
v2
аn
в точке М
v
k = 1/ ,
а a 2 an2
для окружности ρ = R.
a
tg
an
для прямой линии ρ = ;
51.
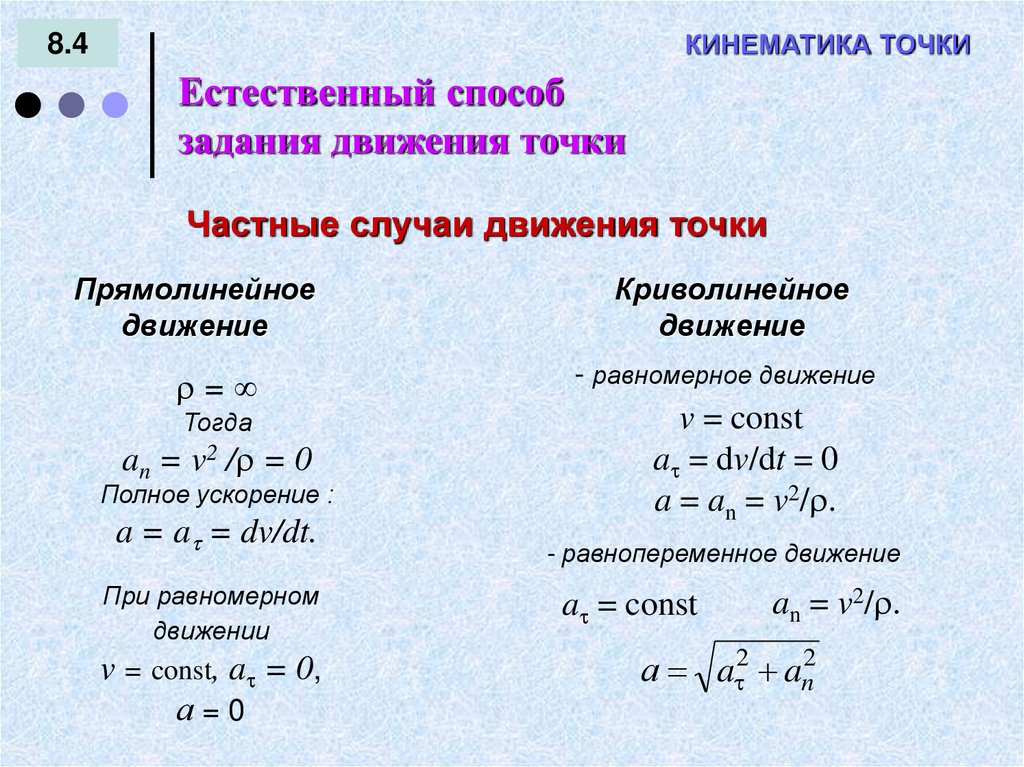
КИНЕМАТИКА ТОЧКИ8.4
Естественный способ
задания движения точки
Частные случаи движения точки
Прямолинейное
движение
=
Тогда
an = v2 / = 0
Полное ускорение :
a = a = dv/dt.
При равномерном
движении
v = const, a = 0,
а=0
Криволинейное
движение
- равномерное движение
v = const
a = dv/dt = 0
a = an = v2/ .
- равнопеременное движение
a = const
an = v2/ .
а a 2 an2
52. ЛЕКЦИЯ 9 План:
МЕХАНИКА9.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
Кинематика твердого тела.
Простейшие движения
ЛЕКЦИЯ 9
План:
9.1. Поступательное движение тела.
9.2. Вращение твёрдого тела вокруг неподвижной оси.
53.
9.2Простейшие движения твердого тела
Поступательное движение тела
Поступательным называется движение
твердого тела, при котором любая
прямая, проведенная в этом теле,
перемещается, оставаясь параллельной
своему начальному направлению.
Свойства поступательного
движения:
1.
Все точки тела описывают одинаковые траектории
2. Все точки тела имеют в каждый момент времени одинаковые по
модулю и направлению скорости и ускорения
54.
Простейшие движения твердого тела9.3
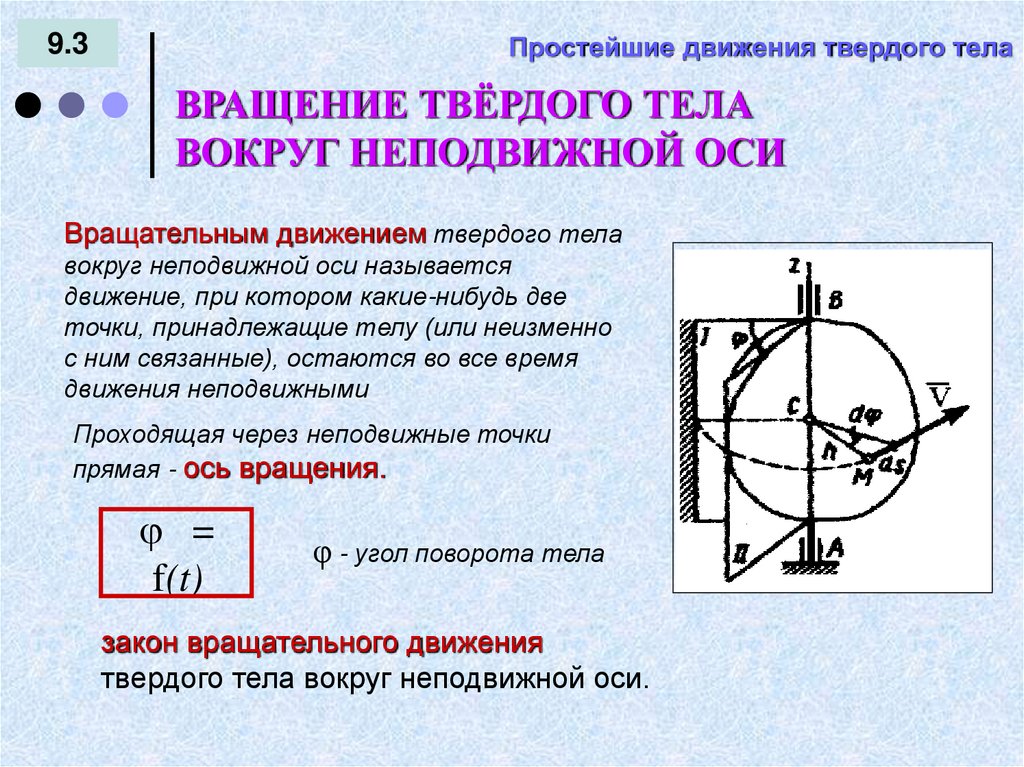
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Вращательным движением твердого тела
вокруг неподвижной оси называется
движение, при котором какие-нибудь две
точки, принадлежащие телу (или неизменно
с ним связанные), остаются во все время
движения неподвижными
Проходящая через неподвижные точки
прямая - ось вращения.
=
f(t)
φ - угол поворота тела
закон вращательного движения
твердого тела вокруг неподвижной оси.
55.
Простейшие движения твердого тела9.4
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Угловая скорость тела
d
dt
Единица измерения
рад/с, 1/с, с-1.
Угловое ускорение тела
d d 2
2
dt dt
Единица измерения ε
рад/с2,
1/с2 ,
с-2.
56.
Простейшие движения твердого тела9.4
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА
ВОКРУГ НЕПОДВИЖНОЙ ОСИ
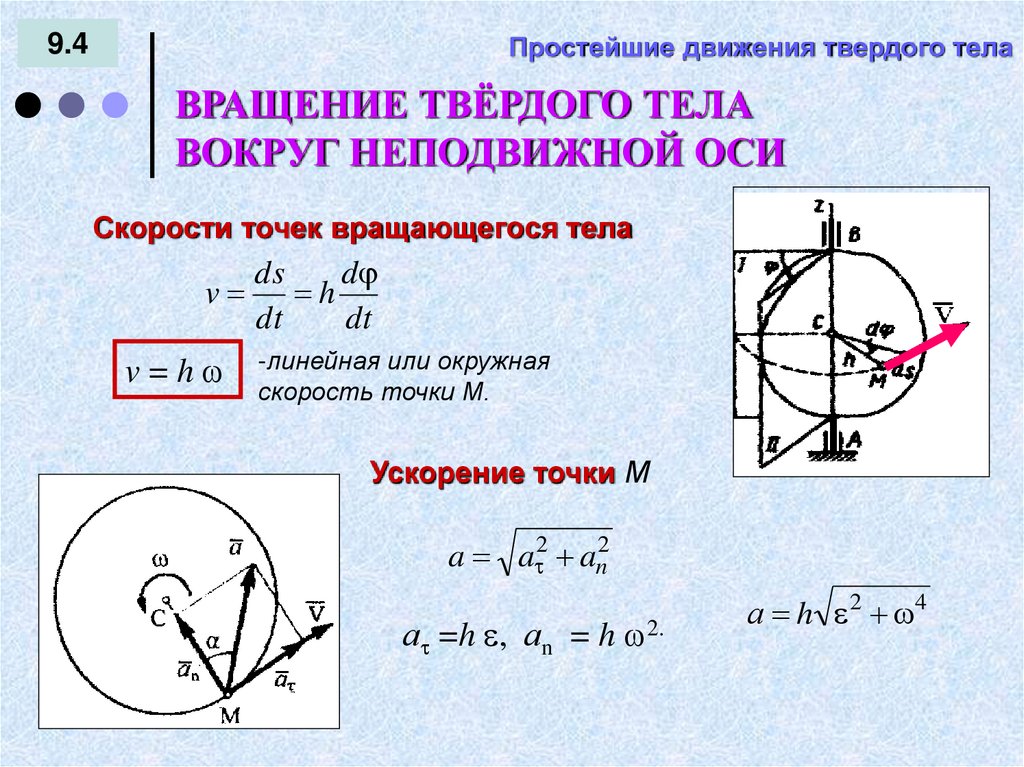
Скорости точек вращающегося тела
ds
d
v h
dt
dt
v=h
-линейная или окружная
скорость точки М.
Ускорение точки М
a a 2 an2
а =h , аn = h 2.
а h 2 4
57. ЛЕКЦИЯ 10 План:
МЕХАНИКА10.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
ЛЕКЦИЯ 10
План:
10.1. Основные определения.
10.2. Теорема о сложении скоростей (теорема Кориолиса).
58.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ10.2
Основные определения
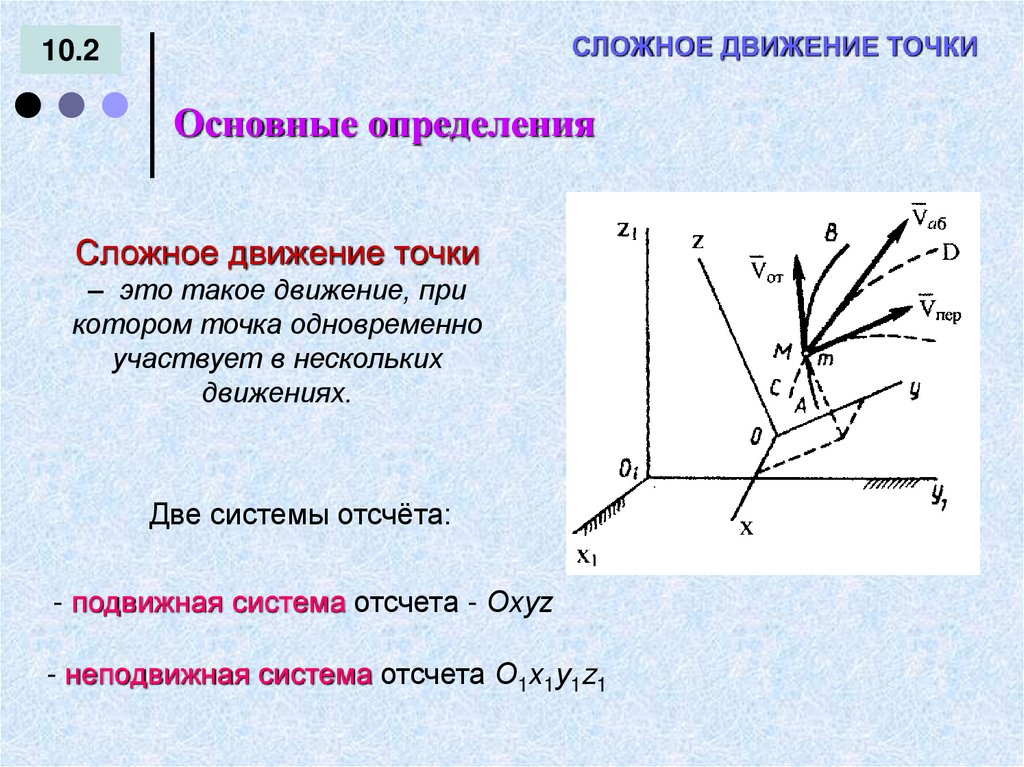
Сложное движение точки
– это такое движение, при
котором точка одновременно
участвует в нескольких
движениях.
Две системы отсчёта:
- подвижная система отсчета - Охуz
- неподвижная система отсчета О1х1у1z1
59.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ10.3
Основные определения
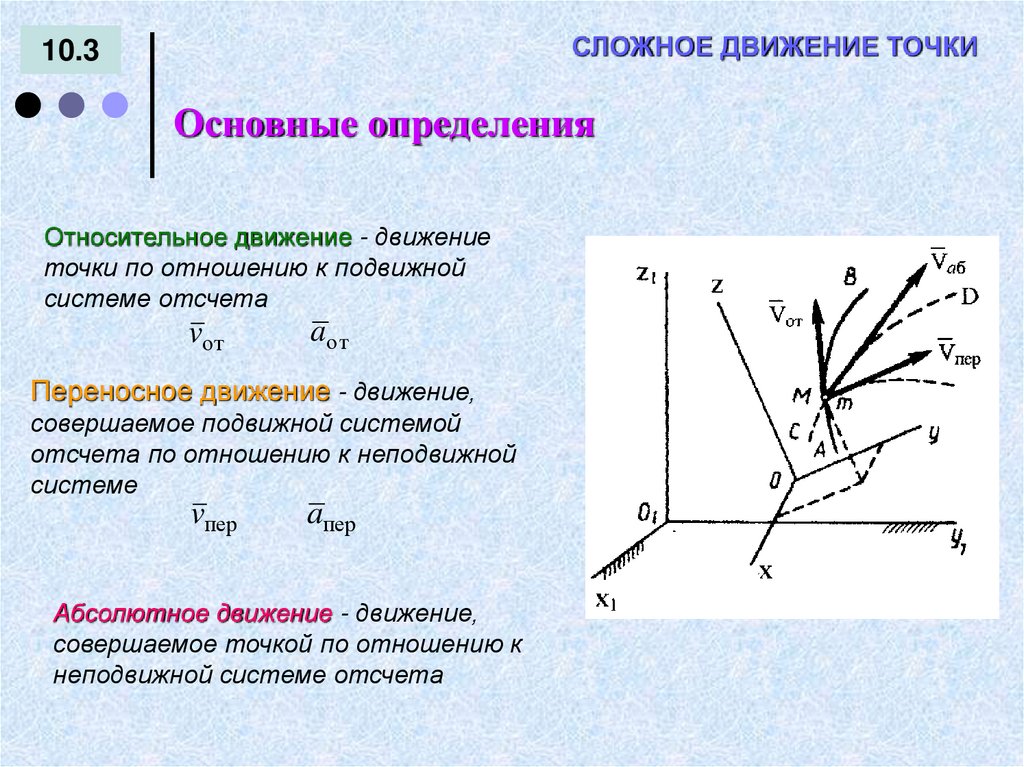
Относительное движение - движение
точки по отношению к подвижной
системе отсчета
vот
aот
Переносное движение - движение,
совершаемое подвижной системой
отсчета по отношению к неподвижной
системе
vпер
aпер
Абсолютное движение - движение,
совершаемое точкой по отношению к
неподвижной системе отсчета
60.
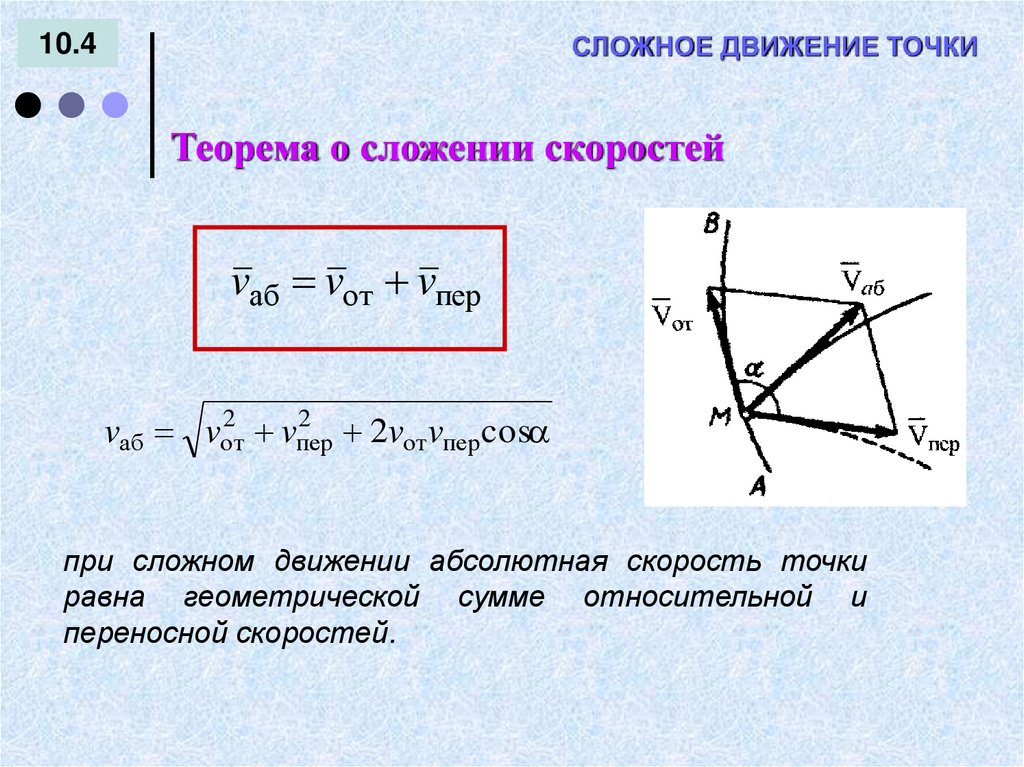
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ10.4
Теорема о сложении скоростей
vаб vот vпер
2
2
vаб vот
vпер
2vотvперcos
при сложном движении абсолютная скорость точки
равна геометрической сумме относительной и
переносной скоростей.
61. ЛЕКЦИЯ 8 План:
МЕХАНИКА11.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
ЛЕКЦИЯ 8
План:
11.1. Теорема о сложении ускорений.
11.2. Ускорение Кориолиса.
62.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ11.2
ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ
(ТЕОРЕМА КОРИОЛИСА)
dvаб dvот dvпер
aаб
dt
dt
dt
aаб
(dvот )от (dvот )пер (dvпер )от (dvпер )пер
dt
dt
dt
dt
aаб aот aпер aкор
акор
(dvпер )от
dt
(dvпер )пер
dt
- кориолисово ускорение
(ускорение Кориолиса)
63.
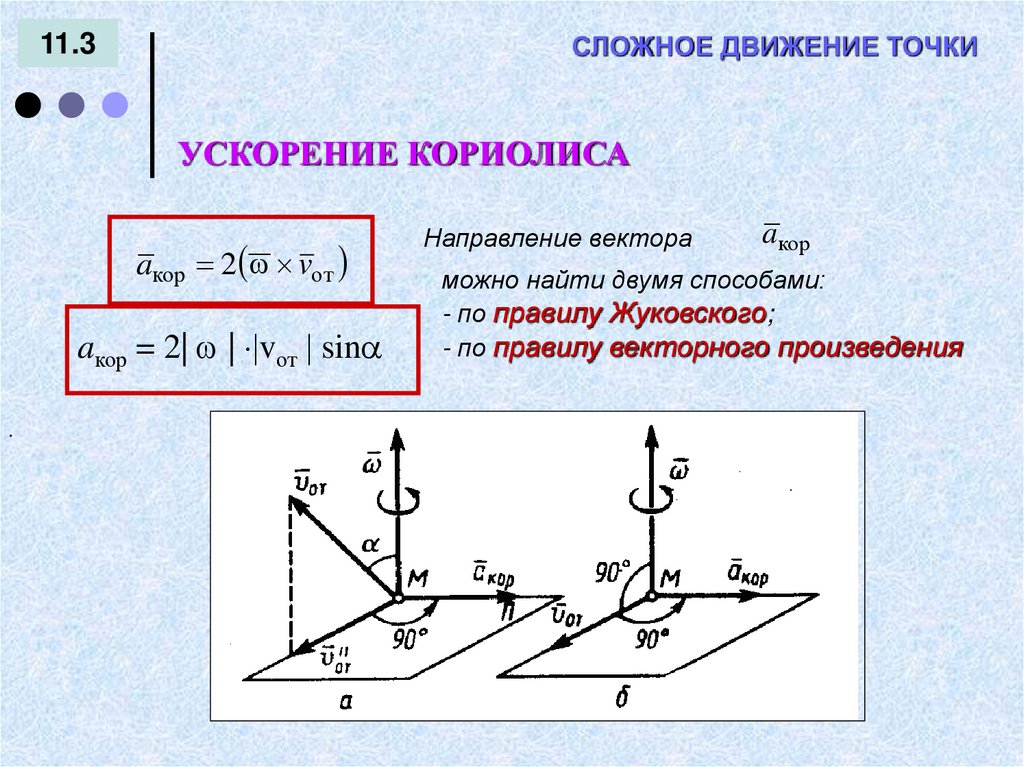
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ11.3
УСКОРЕНИЕ КОРИОЛИСА
aкор 2 vот
aкор = 2| | vот sin
.
Направление вектора
aкор
можно найти двумя способами:
- по правилу Жуковского;
- по правилу векторного произведения
64.
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ11.4
УСКОРЕНИЕ КОРИОЛИСА
aкор 0
aкор 2 vот
в следующих случаях:
- когда = 0, т. е. переносное движение является поступательным;
- когда относительная скорость в данный момент времени
обращается в нуль;
- когда угол между векторами
когда
и vот = 0, или = 180°, т.е.
vот параллелен оси переносного вращения
65. ЛЕКЦИЯ 12 План:
МЕХАНИКА12.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
Плоскопараллельное движение
твердого тела
ЛЕКЦИЯ 12
План:
12.1. Понятие плоскопараллельного движения тела
12.2. Определение скоростей точек плоской фигуры
12.3. Понятие МЦС и способы его нахождения
66.
12.2Плоскопараллельное движение твердого тела
Понятие о плоскопараллельном
движении тела
Плоскопараллельное (плоское) движение
- такое движение твердого тела, при
котором все его точки перемещаются
параллельно некоторой фиксированной
плоскости П
Закон движения плоской фигуры:
полюс
xA = f1(t);
уA = f2(t);
= f3(t)
67.
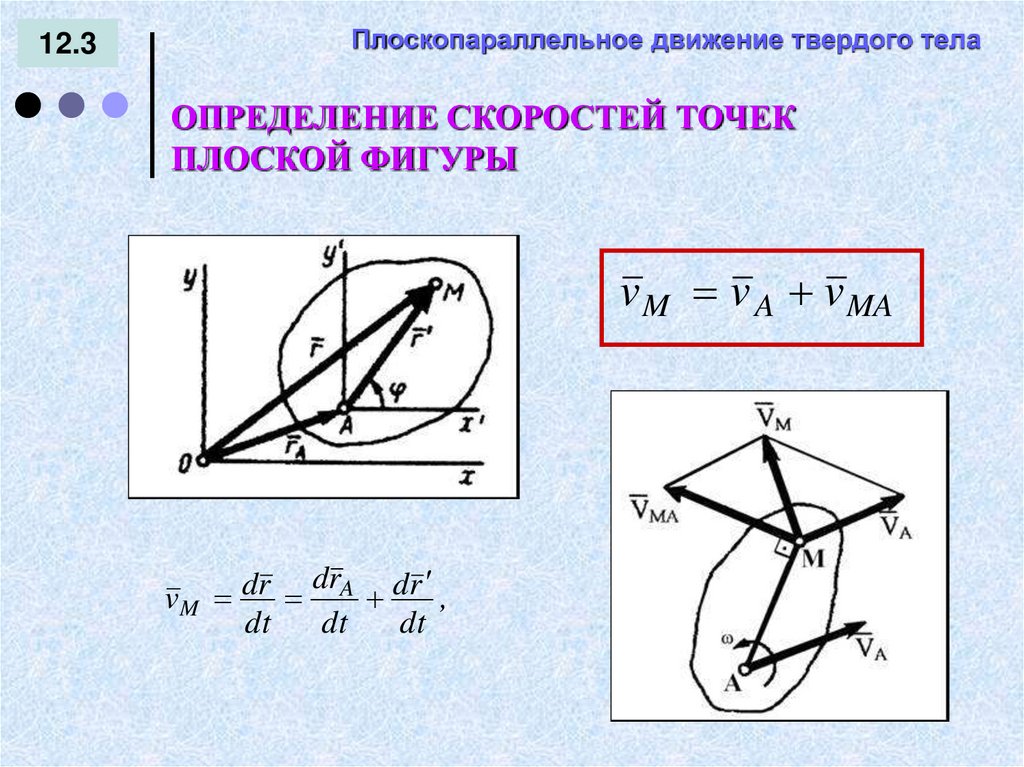
12.3Плоскопараллельное движение твердого тела
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК
ПЛОСКОЙ ФИГУРЫ
v M v A v MA
dr
vM dr A dr ,
dt
dt
dt
68.
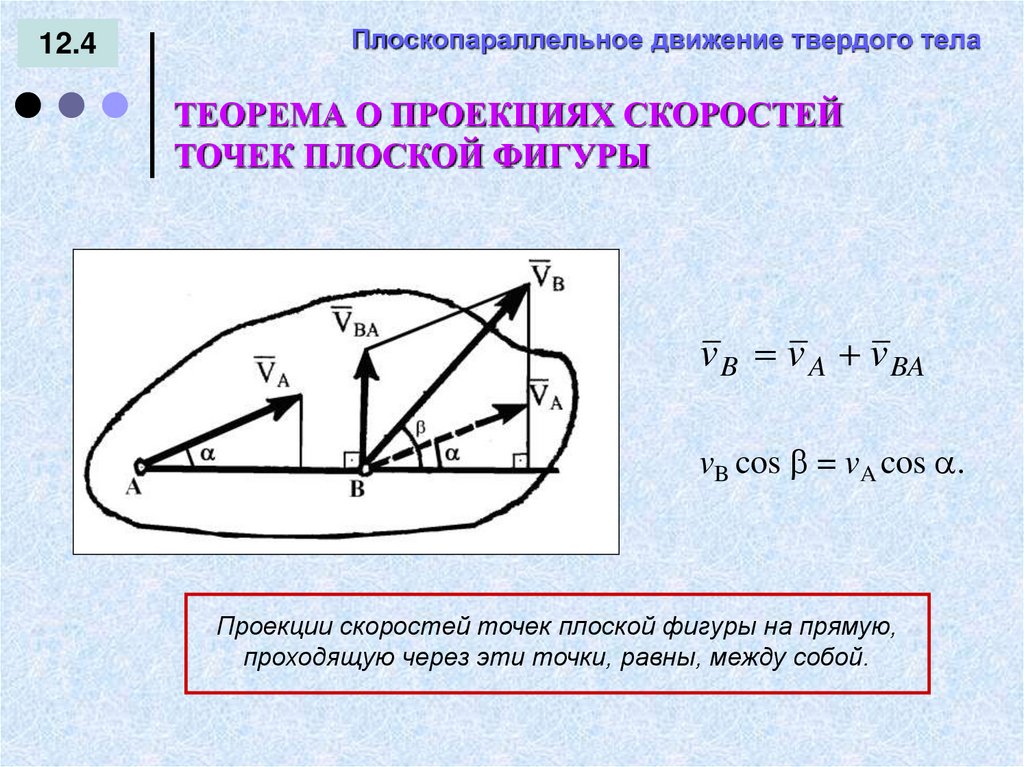
12.4Плоскопараллельное движение твердого тела
ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ
ТОЧЕК ПЛОСКОЙ ФИГУРЫ
v B v A v BA
vB cos = vA cos .
Проекции скоростей точек плоской фигуры на прямую,
проходящую через эти точки, равны, между собой.
69.
12.5Плоскопараллельное движение твердого тела
Понятие МЦС и способы
его нахождения
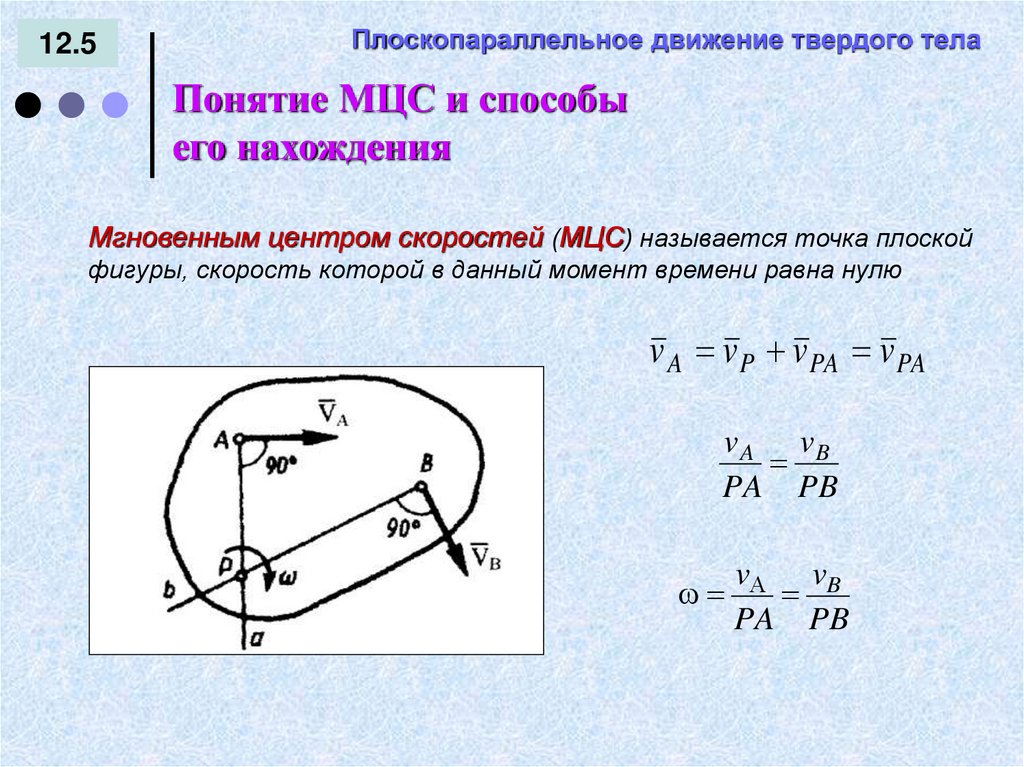
Мгновенным центром скоростей (МЦС) называется точка плоской
фигуры, скорость которой в данный момент времени равна нулю
v A v P v PA v PA
v A vB
PA PB
vА vB
PA PB
70.
12.5Плоскопараллельное движение твердого тела
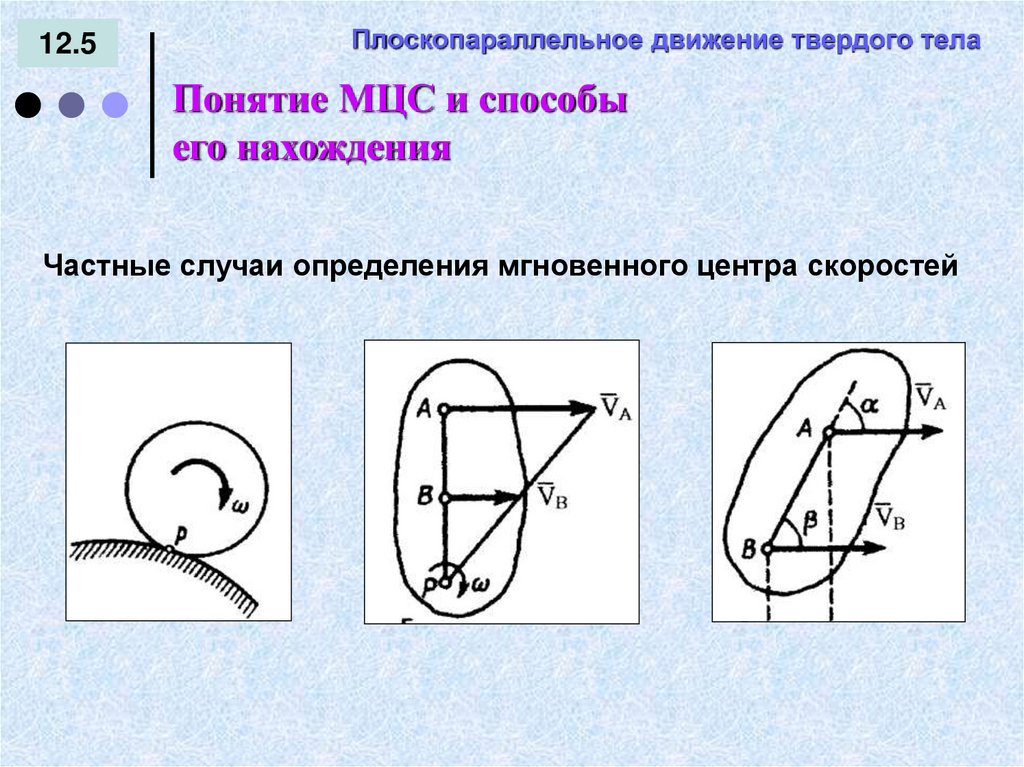
Понятие МЦС и способы
его нахождения
Частные случаи определения мгновенного центра скоростей
71. ЛЕКЦИЯ 13 План:
МЕХАНИКА13.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
КИНЕМАТИКА
Плоскопараллельное движение
твердого тела
ЛЕКЦИЯ 13
План:
13.1. Определение ускорений точек плоской фигуры
13.2. Мгновенный центр ускорений
72.
13.2Плоскопараллельное движение твердого тела
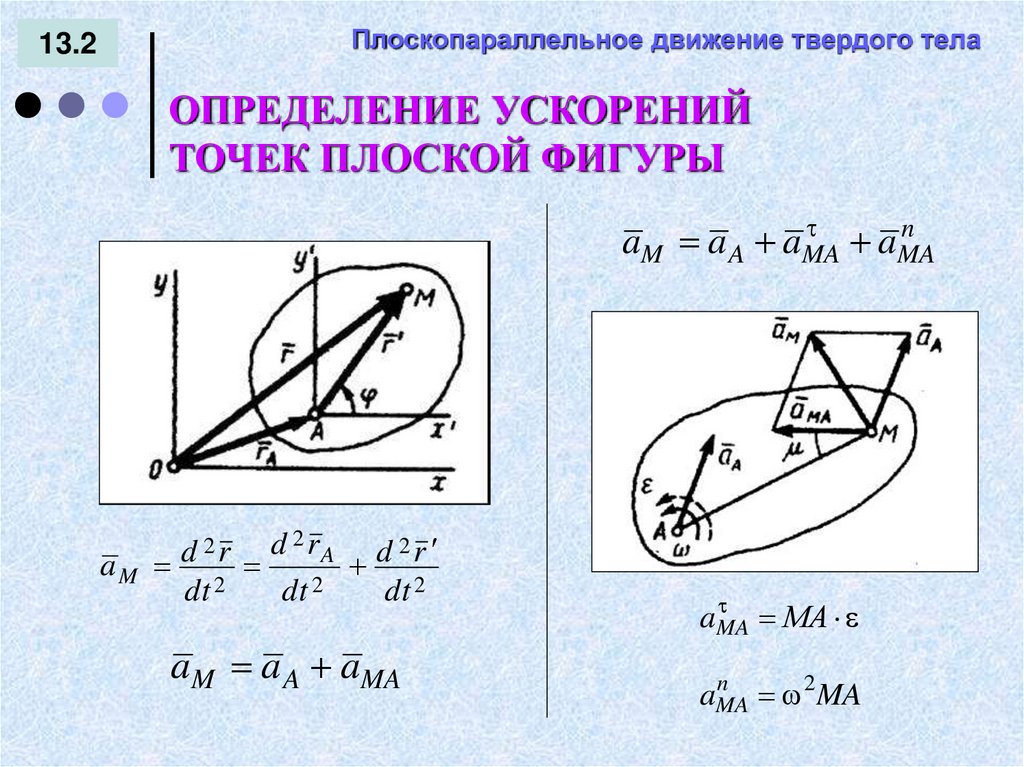
ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ
ТОЧЕК ПЛОСКОЙ ФИГУРЫ
a a a
M
MA
n
aM a A aMA
aMA
2r
d 2 rA d 2 r
d
aM
2
2
dt
dt
dt 2
aM a A aMA
n
aM a A aMA
aMA
A
aMA
МА
n
aMA
2 MA
73.
13.3Плоскопараллельное движение твердого тела
МГНОВЕННЫЙ ЦЕНТР
УСКОРЕНИЙ
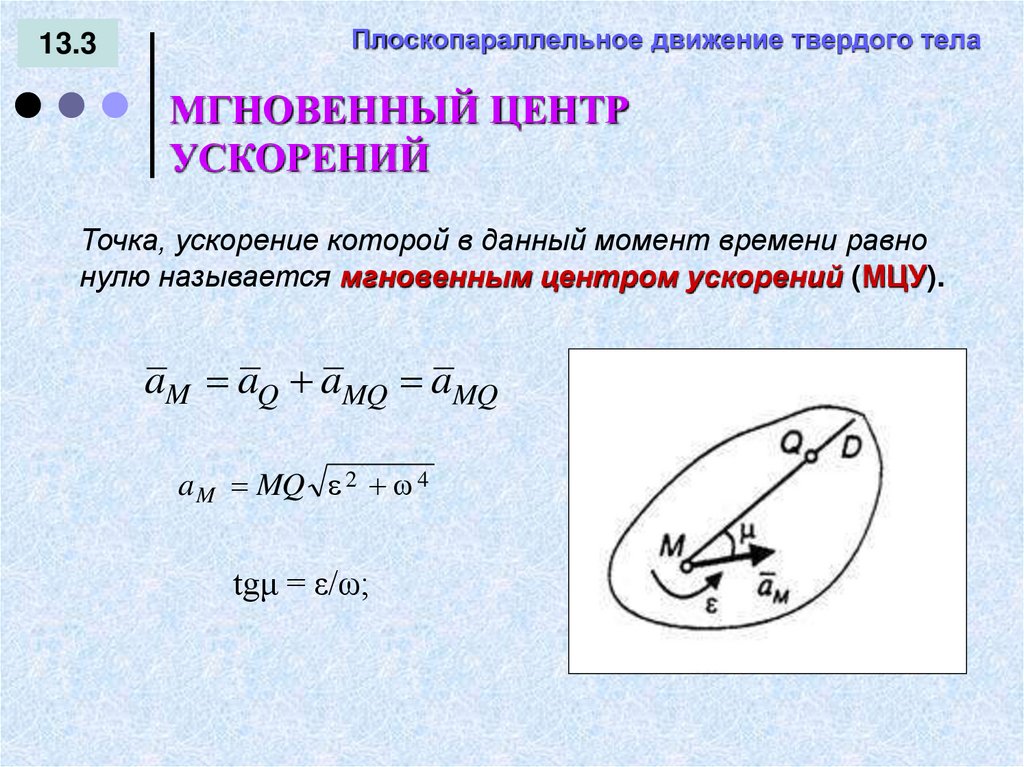
Точка, ускорение которой в данный момент времени равно
нулю называется мгновенным центром ускорений (МЦУ).
aM aQ aMQ aMQ
a M MQ 2 4
tgμ = ε/ω;
74.
Плоскопараллельное движение твердого тела13.3
МГНОВЕННЫЙ ЦЕНТР
УСКОРЕНИЙ
a M MQ 2 4
tg μ = ε/ω;
Частные случаи :
- если =0, ω≠ 0, то угол = 0 и ускорения всех точек будут
направлены к МЦУ;
- если ≠0, ω = 0, то угол = 90о и ускорения всех точек
направлены перпендикулярно к отрезкам, соединяющим эти точки
с МЦУ
75.
МЕХАНИКАТеоретическая механика
Модуль 1
Раздел 3 – ДИНАМИКА ТОЧКИ
ОБЩИЕ СВЕДЕНИЯ
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
ЛЕКЦИЯ 14
ЛЕКЦИЯ 15
ЛЕКЦИЯ 16
76. ЛЕКЦИЯ 14 План:
МЕХАНИКА14.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ДИНАМИКА ТОЧКИ
Общие сведения
ЛЕКЦИЯ 14
План:
14.1. Основные законы механики
14.2. Дифференциальные уравнения движения
материальной точки
77. ДИНАМИКА ТОЧКИ
14.2ДИНАМИКА ТОЧКИ
ОБЩИЕ СВЕДЕНИЯ
Динамика - это раздел механики, в котором изучается
движение материальных точек, тел и механических систем
под действием приложенных сил
Основные законы механики
Первый закон (закон инерции)
Второй закон (основной закон динамики)
ma F
Третий закон (закон равенства действия и противодействия)
Четвертый закон (закон независимости действия сил)
а а1 а2 ... аn
78. ДИНАМИКА ТОЧКИ
14.3ДИНАМИКА ТОЧКИ
ОБЩИЕ СВЕДЕНИЯ
Инерция – это свойство
материальной точки оказывать
сопротивление изменению скорости.
ma F и
Сила инерции материальной точки направлена противоположно
ускорению точки и приложена к телу, сообщающему точке это
ускорение
79. ДИНАМИКА ТОЧКИ
14.4ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Дифференциальные уравнения движения точки
в проекциях на декартовые оси:
2x
d
m
Fkx
2
dt
d2y
m
Fky
2
dt
2
m d z Fkz
dt 2
Закон движения точки:
x = f1(t);
y = f2 (t);
z = f3(t).
80. ДИНАМИКА ТОЧКИ
14.5ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Дифференциальные уравнения в проекциях на оси
естественного трехгранника
dv
а
dt
v2
аn
dv
m Fk
dt
v2
m Fkn
81. ЛЕКЦИЯ 15 План:
МЕХАНИКА15.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ДИНАМИКА ТОЧКИ
Дифференциальные уравнения
движения материальной точки
ЛЕКЦИЯ 15
План:
15.1. Две задачи динамики.
15.2. Решение задач
82. ДИНАМИКА ТОЧКИ
15.2ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
d 2r
m 2 Fk
dt
ДВЕ ЗАДАЧИ ДИНАМИКИ
Первая задача динамики: по известному закону
движения материальной точки находят приложенные к
ней силы.
.
Вторая (основная) задача динамики: при известных
действующих на материальную точку силах, определяют
закон движения точки
83. ДИНАМИКА ТОЧКИ
15.3ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Решение задач динамики точки:
Первая задача
динамики:
составить и решать дифференциальные
уравнения движения материальной точки
выбрать систему координат и записать
начальные условия;
изобразить движущуюся точку в произвольном
положении и все действующие на точку силы;
составить дифференциальные уравнения
движения точки;
проинтегрировать полученные уравнения,
определив постоянные интегрирования из начальных
условий.
найти искомые величины из полученных
выражений.
Вторая задача
динамики:
84. ДИНАМИКА ТОЧКИ
15.4ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Лифт весом Р
начинает подъем
по закону:
y = at2.
Решение. На лифт действуют сила
тяжести P и реакция троса T
d2y
m
Fky
2
dt
m y Py T y
(P/g) 2a = T - P,
T = P (1 + 2a/g).
Если лифт опускается с таким же ускорением:
Определить:
натяжение троса Т
Т = Р (1 - 2а/g).
85. ДИНАМИКА ТОЧКИ
15.5ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Задача 2.
Материальная точка
с массой m движется
под действием
постоянной силы Q
Решение:
Учитывая, что Qx = Q :
dvx
m
Q
dt
vx = (Q/m) t+C1.
dx
= (Q/m) t+C1.
dt
x = (Q/2m)t2+C1t+C2
Найти:
закон движения точки
при начальных условиях:
t=0, x=x0, vx=v0 .
v0 = C1, x0 = C2
x = x0 + v0 t + (Q/2m)t2.
86. ЛЕКЦИЯ 16 План:
МЕХАНИКА16.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ДИНАМИКА ТОЧКИ
Дифференциальные уравнения
движения материальной точки
ЛЕКЦИЯ 16
План:
16.1. Свободные прямолинейные колебания материальной точки
16.2. Влияние постоянной силы на свободные колебания точки
87. ДИНАМИКА ТОЧКИ
16.2ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Свободные прямолинейные колебания
материальной точки
Восстанавливающая сила F - сила,
стремящаяся вернуть точку в положение
равновесия (всегда направлена к положению
равновесия и зависит от величины отклонения
точки от положения равновесия х).
Сила сопротивления R, зависящая от
скорости движения
Возмущающая сила, т.е. сила, являющаяся
заданной функцией времени.
Fх cx
Rх x
88. ДИНАМИКА ТОЧКИ
16.3ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Свободные прямолинейные колебания материальной
точки
Восстанавливающая
сила
если
c/m = k2, то
x k 2 x 0
Fх cx
m x Fx ,
или
m x сx
дифференциальное уравнение
свободных колебаний
при отсутствии сопротивления.
89. ДИНАМИКА ТОЧКИ
x16.4
ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Свободные прямолинейные колебания материальной
точки
x k 2 x 0
Характеристическое
уравнение:
Пусть
C1 = Acos ,
C2 = Asin ,
х = А (sin kt cos + cos kt sin )
x = ent
или
n2 + k2 = 0, n1,2 = ± ik
закон гармонических колебаний точки:
общее решение
x = C1 sin kt + C2 cos kt,
x = Asin (kt + ).
Скорость точки: vx =
Ak cos (kt + ).
90. ДИНАМИКА ТОЧКИ
16.5ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Свободные прямолинейные колебания материальной
точки
x = A sin (kt + )
A - амплитуда колебаний.
(kt+ )= - фаза колебаний.
- начальная фаза колебаний.
k - круговая частота колебаний
Период колебаний Т промежуток времени, в течение
которого точка совершает одно
полное колебание
T = 2 /k.
Частота колебаний ν – число
колебаний, совершаемых за 1с
= 1/T = k/2 .
91. ДИНАМИКА ТОЧКИ
16.6ДИНАМИКА ТОЧКИ
Дифференциальные уравнения движения
материальной точки
Влияние постоянной силы на свободные колебания
точки
точка равновесия
(P F )
Fx = - с(х + ст)
В результате
const
m x cx
или
статическое отклонение
P= const
F = cx
В точке равновесия при x= ст
F=P = с ст
x k 2 x 0
Т 2 m cт / P
92.
МЕХАНИКАТеоретическая механика
Модуль 1
Раздел 4 – ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ЛЕКЦИЯ 17
ЛЕКЦИЯ 18
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
ЛЕКЦИЯ 19
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
ЛЕКЦИЯ 20
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ
ЭНЕРГИИ
ЛЕКЦИЯ 21
93. ЛЕКЦИЯ 17 План:
МЕХАНИКА17.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ЛЕКЦИЯ 17
План:
17.1. Введение в динамику системы. Свойства внутренних сил.
17.2. Центр масс механической системы
17.3. Теорема о движении центра масс механической системы
17.4. Закон сохранения движения центра масс.
17.5. Примеры применения теоремы о движении центра масс.
94. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.2ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
Введение в динамику системы
Механическая система - совокупность материальных точек или
тел, находящихся в механическом взаимодействии
Fke - Внешние силы, действующие на точки системы со стороны
точек или тел, не входящих в состав данной системы
Fki - Внутренние силы, с которыми точки или тела данной системы
действуют друг на друга
Свойства внутренних сил:
Fki 0
i
m
(
F
0 k ) 0
95. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.3ОБЩИЕ
ТЕОРЕМЫ
ДИНАМИКИ
ТЕОРЕМА О ДВИЖЕНИИ
ЦЕНТРА
МАСС
Центр масс механической системы
Масса системы: M mk
Центром масс (центром инерции) механической системы называется
геометрическая точка С, координаты которой :
mk xk
x
С
M
mk yk
у
С
M
Радиус-вектор центра масс:
mk zk
zC
M
mk rk
r
C
M
96. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.4ТЕОРЕМА
О ДВИЖЕНИИ ЦЕНТРА МАСС
Для каждой точки системы
mk ak Fke Fki
mk a k Fke Fki
d 2 rk
d 2 rC
mk 2 M 2
dt
dt
mk rk
rC
M
mk rk MrC
mk a k MaC
a C — ускорение центра
масс системы
Мa C Fke
d 2 хC
e
M
F
kx
2
dt
d 2 уC
e
M
F
kу
2
dt
d 2 zC
e
M
F
kz
dt 2
Дифференциальные уравнения
движения центра масс в проекциях
на оси координат
97. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.5ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
Мa C Fke
Закон сохранения движения
центра масс
1. Пусть сумма внешних сил, действующих на систему, равна нулю
e
F
k 0
aC 0
vC сonst
2. Пусть сумма внешних сил системы, не равна нулю, но сумма их
проекций на какую-нибудь ось равна нулю
Fke 0
Fkхe 0
М x C 0
x C 0
x C vCx const
98. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.6ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
Примеры применения теоремы о
движении центра масс
Действие пары сил на тело
Fke F F ' 0
aC 0
vC сonst v0C 0
Движение по горизонтальной плоскости
Fтр
F
F’
99. ЛЕКЦИЯ 18 План:
МЕХАНИКА18.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
ЛЕКЦИЯ 18
План:
18.1. Количество движения.
18.2. Импульс силы.
18.3. Теорема об изменении количества движения
18.4. Закон сохранения количества движения.
100. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
18.2ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
Количество движения
mv
- Количество
движения
материальной точки
Количество движения механической системы
Количество движения твердого тела
Q mk vk .
Q МvС
101. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
18.3ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
Импульс силы
Элементарный импульс силы:
dS Fdt
Импульс силы за конечный промежуток времени t1:
t1
S F dt.
0
Проекции импульса на координатные оси
t1
t1
t1
S у Fу dt .
S x Fx dt.
S z Fz dt.
0
0
0
Единицей измерения импульса силы в системе СИ является 1
кг м/с = 1 Н/с.
102. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
18.4ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
Дифференциальное уравнение движения точки
t1
d ( mv )
Fk .
dt
mv mv0 Fk dt .
0
mv mv0 Sk
Теорема об изменении количества
движения материальной точки
mv1x mv0 x Skx ,
mv1 y mv0 y Sky ,
mv1z mv0 z Skz.
103. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
18.5ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
mk a k Fke Fki
Для всех точек механической системы
d m v dQ .
m
a
k k
k k
dt
dt
=0
Теорема об изменении количества движения системы:
dQ
Fke .
dt
t1
Q1 Q0 Fke dt
0
dQ y
dQx
dQz
e
e
Fkx ,
Fkze .
Fky ,
dt
dt
dt
e
Q1 Q0 S k
e
Q1x Qox S kx
e
Q1 y Qoy S ky
e
Q1z Qoz S kz
104. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
17.10ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА
ДВИЖЕНИЯ
Закон сохранения количества
движения
1.
2.
Fke 0.
Fkхe 0.
dQ
Fke 0
dt
dQx
e
Fkx
0
dt
Q const
Qх const
105. ЛЕКЦИЯ 19 План:
МЕХАНИКА19.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
ЛЕКЦИЯ 19
План:
19.1. Осевые моменты инерции тела.
19.2. Момент количества движения материальной точки.
19.3. Теорема об изменении момента количества движения точки
106. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
19.2ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Осевые моменты инерции тела
Iz= mkhk2
I z M 2z
ρ - радиус инерции тела
Теорема Гюйгенса
IOx = ICx + M a2;
IOy = ICy + M b2.
107. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
19.3ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Момент количества движения
материальной точки
m0 mv r mv
m0 mv mvh
mz mv m0 mv z
m0 mv cos
γ
108. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
19.4ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Теорема об изменении
момента количества движения точки
d r mv dr mv r m dv v mv r ma .
dt
dt
dt
v mv 0
d
r mv r F
dt
d
m0 (mv ) m0 ( F )
dt
или
109. ЛЕКЦИЯ 20 План:
МЕХАНИКА20.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
ЛЕКЦИЯ 20
План:
20.1. Теорема об изменении кинетического момента.
20.2. Дифференциальное уравнение вращения твёрдого тела
110. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
20.2ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Кинетический момент системы
К 0 m0 (mk vk )
К х mх (mk vk )
К у mу (mk vk )
К z mz (mk vk )
Кинетический момент вращающегося
тела
mz mk vk mk vk hk
К z mz (mk vk )
К z mk vk hk mk hk2
К z I z
111. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
20.3ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Если рассмотреть одну точку системы:
d [m (m v )] m ( F e ) m ( F i ) ,
0
k k
0 k
0 k
dt
для всех точек системы:
=0
d [ m ( m v )] m ( F e ) m ( F i ) .
0 k k
0 k 0 k
dt
dK 0
m0 ( Fke )
dt
Теорема об изменении кинетического
момента механической системы
dK x
mx ( Fke )
dt
dK y
my ( Fke )
dt
dK z
mz ( Fke )
dt
112. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
20.4ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
следствия из теоремы:
dK 0
m0 ( Fke )
dt
dK z
mz ( Fke )
dt
1. Если сумма моментов всех внешних сил, действующих на
систему, относительно центра О равна нулю
m0 ( Fke ) 0
то
K0 const
2. Если сумма моментов всех внешних сил, действующих на
систему, относительно некоторой неподвижной оси равна нулю
mz ( Fke ) 0
то
Kz = const
113. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
20.5ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОГО МОМЕНТА
Дифференциальное уравнение вращения тела
вокруг неподвижной оси
dK z
mz ( Fke ) mz ( Rk ) М z
dt
К z I z
dK z d I z
d
Iz
dt
dt
dt z
d
d 2
Iz
Iz 2 М z
dt
dt
114. ЛЕКЦИЯ 21 План:
МЕХАНИКА21.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ЛЕКЦИЯ 21
План:
21.1. Работа силы и мощность
115. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
21.3ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ
ЭНЕРГИИ
Работа силы. Мощность
Элементарная работа силы
dA = F ds, где F = F cos ,
dA = Fds cos .
Работа силы на конечном перемещении
1. ( F const)
( M1 )
A( M 0 M1 ) F ds
(M 0 )
2. ( F const)
A( M 0 M1 ) F s1 Fs1cos
116. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
21.4ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Работа силы. Мощность
Если вектор силы спроецировать на оси координат
( M1 )
A( M 0 M1 ) ( Fx dx Fy dy Fz dz)
(M 0 )
Единицей измерения работы в системе СИ является - 1 джоуль
(1 Дж = 1H м = 1 кг м2 /с2).
Мощность - это величина, определяющая работу, совершаемую
силой в единицу времени.
N = dA/dt = F ds/dt = F v.
Единицей измерения мощности в системе СИ является ватт
(1 Вт = 1Дж/с). В технике - 1 л.с. = 736 Вт.
117. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
21.5ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Примеры вычисления работы
Работа силы тяжести
z1
A( M 0 M1 ) ( P)dz P( z0 z1 )
z0
z0 - z1 = h
A( M 0 M1 ) Р h
Работа силы тяжести не зависит от формы траектории точки её
приложения. Силы, обладающие таким свойством, называются
потенциальными силами.
118. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
21.6ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Работа силы. Мощность
Работа силы упругости
F = cλ = c x и Fx = -cx.
x1
c
A( M 0 M1 ) ( cx)dx ( x02 x12 ).
2
x0
A( M 0 M 1 )
с 2
( 0 21 ) ,
2
119. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
21.7ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Работа силы. Мощность
Работа силы, приложенной к вращающемуся телу
dA F ds
где
ds = h dφ
dA = F h dφ.
F h = mz( F ) = Mz
dA = Mz dφ
1
A M z d или
0
A = ± Mz ∙ φ.
120. ЛЕКЦИЯ 22 План:
МЕХАНИКА22.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ЛЕКЦИЯ 22
План:
22.1. Кинетическая энергия.
22.2. Теорема об изменении кинетической энергии
121. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
22.2ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ
ЭНЕРГИИ
Кинетическая энергия
для материальной точки
для механической системы
из n материальных точек
M
V
v2
m
2
vk2
T mk
2
k 1
n
Кинетическая энергия - скалярная величина
Единица измерения кинетической энергии в системе СИ - 1 Дж.
122. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
22.3ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Кинетическая энергия
для твердого тела
Поступательное движение
Вращательное движение
2
T Iz
2
vС2
М
2
Плоскопараллельное движение
2
Tпл I P
2
v2
2
Tпл M
Iс
2
2
123. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
22.4ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Рассмотрим материальную точку с массой m
ma = Fk .
M
a
dv dv ds
dv
v
dt ds dt
ds
V
mv
mv 2
d(
) dAk
2
теорема об изменении
кинетической энергии точки
в дифференциальной форме
dv
Fk
ds
mvdv dAk
mv12 mv02
А(М0М1 )
2
2
теорема об изменении
кинетической энергии точки
в конечном виде
124. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
22.5ТЕОРЕМА ОБ ИЗМЕНЕНИИ
КИНЕТИЧЕСКОЙ ЭНЕРГИИ
Рассмотрим материальную точку механической системы с массой mk
d(
mk v 2k
2
) dAek dAik
Для всей механической системы
d (
mk v 2k
2
) dAek dAik
dT dAek dAik
T Т 0 Aek Aik
теорема об изменении
кинетической энергии системы
в дифференциальной форме
теорема об изменении
кинетической энергии системы
в интегральной форме
125.
МЕХАНИКАТеоретическая механика
Модуль 1
Раздел 5 – АНАЛИТИЧЕСКАЯ МЕХАНИКА
ПРИНЦИП ДАЛАМБЕРА
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
ЛЕКЦИЯ 23
ЛЕКЦИЯ 24
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
ЛЕКЦИЯ 25
УРАВНЕНИЯ ЛАГРАНЖА
ЛЕКЦИЯ 18
ЛЕКЦИЯ 26
126. ЛЕКЦИЯ 23 План:
МЕХАНИКА23.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ПРИНЦИП ДАЛАМБЕРА
ЛЕКЦИЯ 23
План:
23.1. Сила инерции.
23.2. Принцип Даламбера для материальной точки и
механической системы.
23.3. Главный вектор и главный момент сил инерции
23.4. Динамические реакции.
127. АНАЛИТИЧЕСКАЯ МЕХАНИКА
23.2ПРИНЦИП ДАЛАМБЕРА
Рассмотрим движение
материальной точки М
ma Fk F a R
F a R ma 0.
ma F и
Сила инерции материальной точки направлена противоположно ее
ускорению и приложена к телу, сообщающему точке это ускорение
Fa R Fи 0
принцип Даламбера для
материальной точки.
128. АНАЛИТИЧЕСКАЯ МЕХАНИКА
23.3ПРИНЦИП ДАЛАМБЕРА
Рассмотрим материальную точку механической системы:
Fka Rk Fku 0
для всех точек полученная система сил будет произвольной
пространственной и уравновешенной:
F F F 0
m F m F m F 0
Принцип Даламбера
для системы
и
m0 Fk M 0 0
Принцип Даламбера
для твердого тела
e
k
0
i
k
e
k
и
k
0
i
k
0
и
k
Fk R и 0
129. АНАЛИТИЧЕСКАЯ МЕХАНИКА
23.4ПРИНЦИП ДАЛАМБЕРА
Главный вектор и главный момент
сил инерции механической системы
Главный вектор сил инерции
R u maC
и
R maC
Главный момент сил инерции
M 0и
R и Fku
dK 0
dt
R nu maCn
M 0и m0 Fkи
dK z
и
Mz
dt
130. АНАЛИТИЧЕСКАЯ МЕХАНИКА
23.5ПРИНЦИП ДАЛАМБЕРА
Частные случаи приведения сил инерции твердого тела
1. Поступательное движение
R и maC
2. Вращательное движение (общий случай)
R и maC
M 0иz J 0 z
d
J 0z
dz
3. Вращение вокруг оси, проходящей через центр масс тела
и
M Сz
J Сz
4. Плоскопараллельное движение
и
R maC
и
M Сz
J Сz
131. АНАЛИТИЧЕСКАЯ МЕХАНИКА
23.5ПРИНЦИП ДАЛАМБЕРА
Динамические реакции вращающегося тела
X A X B Rxe Rxи 0;
YA YB Rye Rиy 0;
Z A Rze Rzи 0;
YBb M xe M xи 0;
e
и
X Bb M y M y 0;
e
и
M z M z 0.
X A X B Rxe mxC 2 ;
e
2
YA YB R y myC ;
e
Z A Rz ;
X Bb M ye J xz 2 ;
e
2
YBb M x J yz .
132. ЛЕКЦИЯ 24 План:
МЕХАНИКА24.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
ЛЕКЦИЯ 24
План:
24.1. Классификация связей.
24.2. Возможные перемещения системы. Идеальные связи.
24.3. Принцип возможных перемещений
133. АНАЛИТИЧЕСКАЯ МЕХАНИКА
24.2ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Классификация связей
Связи - это любого вида ограничения, которые налагаются на
положения и скорости точек механической системы
Стационарные
Нестационарные
Геометрические
Кинематические
(дифференциальные)
Интегрируемые
Неинтегрируемые
Голономные
Неголономные
Удерживающие
Неудерживающие
134. АНАЛИТИЧЕСКАЯ МЕХАНИКА
24.3ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Возможные перемещения системы
Возможное перемещение механической системы - это совокупность
воображаемых элементарных перемещений точек системы из
занимаемого в данный момент положения, которые допускаются всеми
наложенными на систему связями
действительное перемещение - dr
дифференциал r r (t )
возможное перемещение – r
вариация r r (t )
х, у, z - проекции r
на координатные оси
s r
135. АНАЛИТИЧЕСКАЯ МЕХАНИКА
24.4ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Число степеней свободы системы - это
число независимых, между собой возможных
перемещений механической системы
Возможная работа - элементарная работа,
которую действующая на материальную точку
сила могла бы совершить на перемещении,
совпадающем с возможным перемещением этой
точки:
А F r
Идеальная связь – это связь, для которой сумма элементарных
работ ее реакций на любом возможном перемещении системы
равна нулю:
Аk Rk rk 0
R
136. АНАЛИТИЧЕСКАЯ МЕХАНИКА
24.5ПРИНЦИП ВОЗМОЖНЫХ
ПЕРЕМЕЩЕНИЙ
(общее условие равновесия механической системы)
Для равновесия механической системы с идеальными связями
необходимо и достаточно, чтобы сумма элементарных работ
всех активных сил на любом возможном перемещении
системы была равна нулю:
Aka 0
a
a
F
r
F
k
k sk cos k 0
k
137. ЛЕКЦИЯ 25 План:
МЕХАНИКА25.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
ЛЕКЦИЯ 25
План:
25.1.Обобщённые координаты и обобщенные скорости.
25.2. Обобщённые силы.
25.3. Общее уравнение динамики
138. АНАЛИТИЧЕСКАЯ МЕХАНИКА
25.2ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Обобщенные координаты механической
системы - независимые между собой
параметры любой размерности, однозначно
определяющие положение системы, число
которых равно числу степеней свободы:
q1, q2, …, qs
Положение любой точки механической
системы:
rk rk q1 ,q2 ,...,qs ,
139. АНАЛИТИЧЕСКАЯ МЕХАНИКА
25.3ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Кинематические уравнения движения
системы в обобщенных координатах
q1 = f1(t),
q2 = f2(t),
…………,
qs = fs(t)
Обобщенные скорости - производные
от обобщенных координат по времени :
q 1 ,q 2 ,...,q s
140. АНАЛИТИЧЕСКАЯ МЕХАНИКА
25.4ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Обобщённые силы
Пусть механическая система состоит из n материальных
точек, на которые действуют силы : F1 , F2 ,...,Fn
Сумма элементарных работ всех сил на возможном
перемещении системы δq:
Ak F1 r1 F2 r2 Fn rn
rk q
A1
Q1
q1
A1 = Q1 q1
- обобщенная сила, соответствующая
обобщенной координате q
141. АНАЛИТИЧЕСКАЯ МЕХАНИКА
25.5ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Если ко всем точкам системы кроме активных сил и реакций
связей прибавить силы инерции, то по принципу Даламбера
полученная система сил будет уравновешенной
Тогда, согласно принципу возможных перемещений:
Aka Akи AkR 0
= 0 для идеальных связей
Aka Akи 0
общее уравнение динамики
(принцип Даламбера–Лагранжа)
142. АНАЛИТИЧЕСКАЯ МЕХАНИКА
25.6ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Общее уравнение динамики в обобщенных координатах:
Q j Qиj q j 0
обобщенная
активная сила
обобщенная сила инерции,
соответствующая
обобщенной координате qj
Q1 Q1и 0
Т.к. величины qj независимы, то:
Q2 Q2и 0
……….,
QS QSи 0
143. ЛЕКЦИЯ 26 План:
МЕХАНИКА26.1
Модуль 1
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
ЛЕКЦИЯ 26
План:
26.1. Уравнения Лагранжа
144. АНАЛИТИЧЕСКАЯ МЕХАНИКА
26.2АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
Лагранж получил формулу, вычисляющую обобщенные силы
и
Q
инерции
j через кинетическую энергию системы:
d T T
Qиj
dt q j q
:
где Т - кинетическая энергия системы
Согласно общему уравнению динамики:
обобщенная сила системы:
Q j Qиj 0
d T T
и
Q j Q j
dt q j q
145. АНАЛИТИЧЕСКАЯ МЕХАНИКА
26.3УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
Дифференциальные уравнения движения системы в
обобщенных координатах (уравнения Лагранжа)
:
d T T
Q2 ,
dt q 2 q2
. . . . . . . . .
d T T
Qs .
dt q s qs
d T T
Q1 ,
dt q 1 q1
146. АНАЛИТИЧЕСКАЯ МЕХАНИКА
26.4АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
Чтобы составить уравнения Лагранжа для данной
механической системы, необходимо:
- установить число степеней свободы системы и выбрать
обобщенные координаты;
- изобразить систему в произвольном положении,все
:
действующие силы (для систем с идеальными связями только
активные);
- вычислить обобщенные силы, при этом каждое возможное
перемещение должно быть положительным;
- записать кинетическую энергию системы и выразить ее через
обобщенные координаты и обобщенные скорости;
- вычислить частные производные согласно уравнениям
Лагранжа;