












































 Физика
ФизикаПохожие презентации:










Динамика материальной точки. Силы в механике. Работа. Энергия
1. Тема 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ.СИЛЫ В МЕХАНИКЕ. РАБОТА. ЭНЕРГИЯ.
2.1. Первый закон Ньютона. Инерциальные системы
2.2. Масса и импульс тела
2.3. Второй закон Ньютона. Принцип суперпозиции
2.4. Третий закон Ньютона
2.5. Импульс произвольной системы тел
2.6. Основное уравнение динамики поступательного
движения произвольной системы тел
2.7. Закон сохранения импульса
2.8. Виды и категории сил в природе
2.9. Сила тяжести и вес тела
2.10. Упругие силы
2.11. Силы трения
2.12. Кинетическая энергия. Работа и мощность
2.13. Потенциальная энергия
2.14. Закон сохранения механической энергии
2. 2.1. Первый закон Ньютона. Инерциальные системы
В основе так называемойклассической или ньютоновской
механики лежат три закона
динамики, сформулированных И.
Ньютоном в 1687 г. Эти законы
играют исключительную роль в
механике и являются (как и все
физические
законы)
обобщением
результатов
огромного человеческого опыта.
3.
Первый закон Ньютона:всякая
материальная
точка
сохраняет состояние покоя или
равномерного
прямолинейного
движения до тех пор, пока
воздействие со стороны других
тел не заставит её изменить
это состояние.
F 0, const или 0
(Закон инерции)
4.
Оба названных состояния схожи тем, чтоускорение тела равно нулю. Поэтому
формулировке первого закона можно придать
следующий вид: скорость любого тела
остаётся постоянной (в частности,
равной нулю), пока воздействие на это
тело со стороны других тел не вызовет
её изменения.
Стремление тела сохранить состояние
покоя или равномерного прямолинейного
движения называется инертностью.
Поэтому первый закон Ньютона называют
законом инерции.
5.
Механическое движение относительно, и егохарактер зависит от системы отсчёта. Первый закон
Ньютона выполняется не во всякой системе отсчёта,
а те системы, по отношению к которым он
выполняется,
называются
инерциальными
системами отсчёта.
Инерциальной системой отсчёта является
такая система отсчёта, относительно которой
материальная точка, свободная от внешних
воздействий, либо покоится, либо движется
прямолинейно и равномерно (т.е. с постоянной
скоростью).
Таким образом, первый закон Ньютона
утверждает
существование
инерциальных
систем отсчёта.
6.
Система отсчёта, связанная с Землей,строго говоря, неинерциальная, однако
эффекты,
обусловленные
её
неинерциальностью (Земля вращается вокруг
собственной оси и вокруг Солнца) при
решении многих задач малы, и в этих случаях
её можно считать инерциальной.
Из приведённых выше примеров легко
понять,
что
основным
признаком
инерциальной
системы
является
отсутствие ускорения.
7.
Сущность первого закона Ньютонаможет быть сведена к трём
основным положениям:
• все тела обладают свойствами инерции;
• существуют инерциальные системы
отсчёта, в которых выполняется первый
закон Ньютона;
• движение относительно.
(Если тело А движется относительно
тела отсчета В со скоростью υ, то и
тело В, в свою очередь, движется
относительно тела А с той же
скоростью, но в обратном направлении) .
8. 2.2. Масса и импульс тела
Воздействие на данное тело со стороныдругих тел вызывает изменение его скорости, т.е.
сообщает данному телу ускорение.
Опыт показывает, что одинаковое воздействие
сообщает разным телам разные по величине ускорения.
Всякое тело противится попыткам изменить
его состояние движения. Это свойство тел, как мы
уже говорили, называется инертностью (следует из
первого закона Ньютона).
Мерой инертности тела
величина, называемая массой.
является
Чтобы определить массу некоторого тела, нужно
сравнить её с массой тела, принятого за эталон массы
(или сравнить с телом уже известной массы).
9.
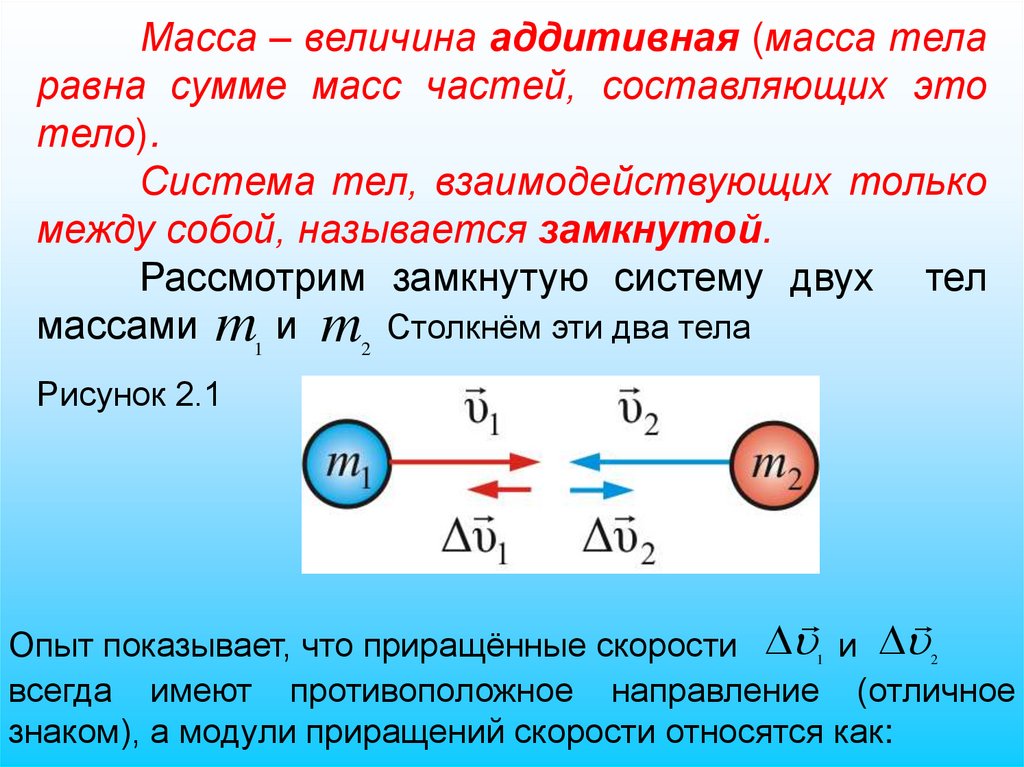
Масса – величина аддитивная (масса теларавна сумме масс частей, составляющих это
тело).
Система тел, взаимодействующих только
между собой, называется замкнутой.
Рассмотрим замкнутую систему двух тел
массами m1 и m2 Столкнём эти два тела
Рисунок 2.1
Опыт показывает, что приращённые скорости 1 и 2
всегда имеют противоположное направление (отличное
знаком), а модули приращений скорости относятся как:
10.
Δ mΔ m
1
2
2
1
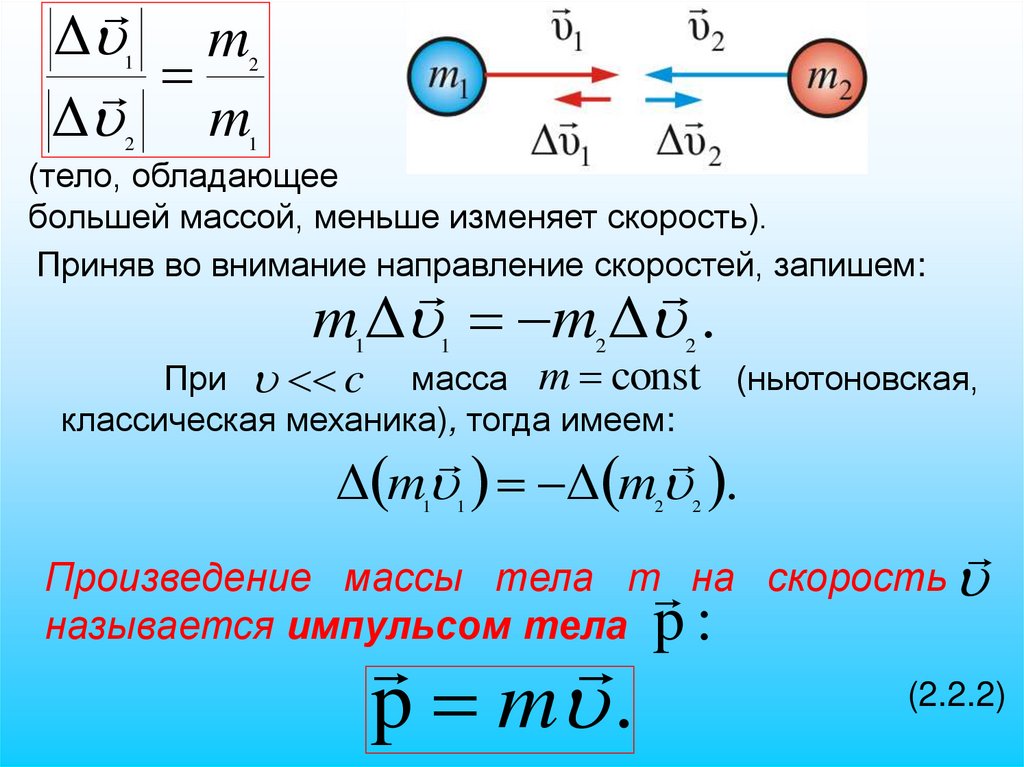
(тело, обладающее
большей массой, меньше изменяет скорость).
Приняв во внимание направление скоростей, запишем:
m Δ m Δ .
1
1
2
2
При c масса m const
классическая механика), тогда имеем:
(ньютоновская,
Δ m Δ m .
1
1
2
2
Произведение массы тела m на скорость
называется импульсом тела p :
p m .
(2.2.2)
11. 2.3. Второй закон Ньютона.
Математическое выражение второго законаНьютона:
dp
dt
F
(2.3.1)
скорость изменения импульса тела равна
действующей на него силе.
,
dp Fd t
Отсюда можно заключить, что
изменение импульса тела равно импульсу силы.
Из (3.3.1), получим выражение второго закона через
ускорение a :
d
d
d m
a,
F. т. к. m const то m dt F. но
dt
dt
тогда ma F
12.
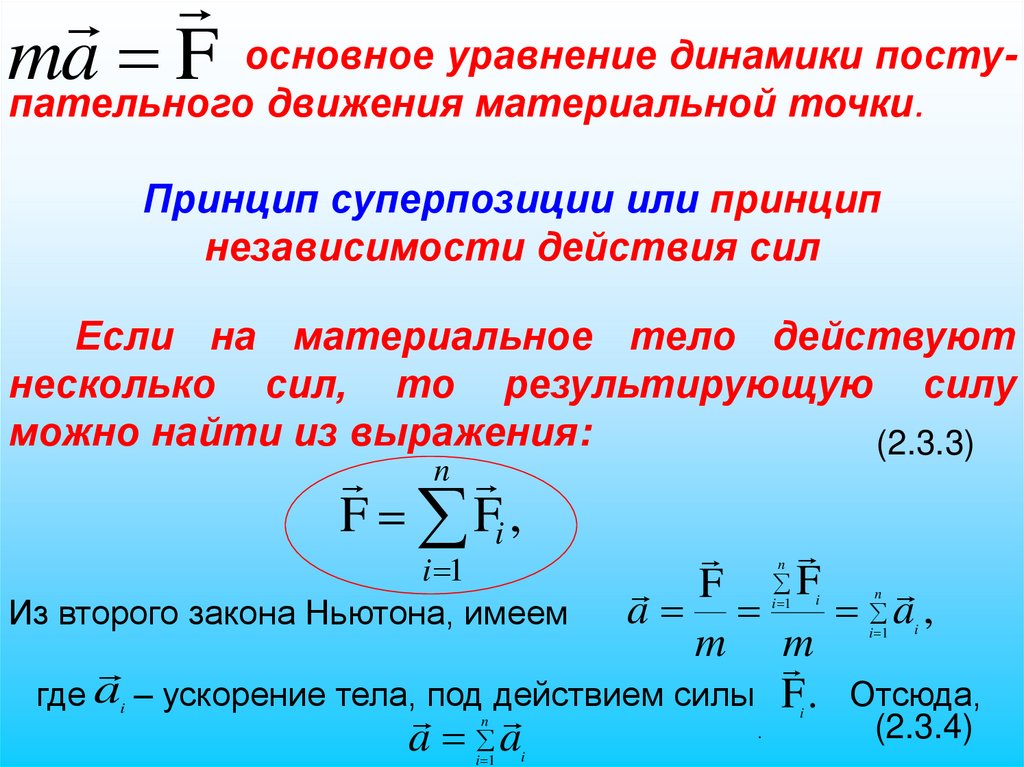
основное уравнение динамики постуma
F
пательного движения материальной точки.
Принцип суперпозиции или принцип
независимости действия сил
Если на материальное тело действуют
несколько сил, то результирующую силу
можно найти из выражения:
(2.3.3)
n
F Fi ,
i 1
F F
a
a ,
Из второго закона Ньютона, имеем
m m
где a – ускорение тела, под действием силы F . Отсюда,
.
(2.3.4)
a a
n
i 1
i
n
i 1
i
i
n
i 1
i
i
13.
a an
i 1
i
Если на материальную точку действует
несколько сил, то каждая из них сообщает точке
такое же ускорение, как если бы других сил не
было.
Найдем изменение импульса тела за
конечный промежуток времени
m m FΔt ,
2
1
Δ mυ F dt
t2
t1
(2.3.5)
т.е., изменение импульса тела равно импульсу силы.
14.
В системе СИ семь основных единиц(м) – метр,
(кг) – килограмм,
(с) – секунда,
(А) – ампер,
(К) – кельвин,
(кд) – кандела (единица силы света),
(кмоль) – единица количества вещества.
Остальные единицы производные
получаются из физических законов связывающих их
с основными единицами. Например из второго
закона Ньютона производная единица силы
1 кг·м/с2 = 1 Н.
15. 2.4. Третий закон Ньютона
Действие телвзаимодействия.
друг
на
друга
носит
характер
Третий закон Ньютона отражает тот
факт, что сила есть результат взаимодействия
тел, и устанавливает, что силы, с которыми
действуют друг на друга два тела, равны
по величине и противоположны по
направлению.
.
(2.4.1)
F12 F21
16. 2.9. Третий закон Ньютона
Взаимодействующие тела действуют друг надруга с одинаковыми по величине, но
противоположными по направлению силами:
F12 F21
Законы Ньютона сформулированы в 1687 г., играют исключительную
роль в механике и являются обобщением результатов огромного
человеческого опыта. Их рассматривают как систему взаимосвязанных
законов и опытной проверке подвергают не каждый закон в
отдельности, а всю систему в целом.
17.
3-й Закон Ньютона в общем случае являетсяуниверсальным законом взаимодействий:
Всякое действие вызывает равное по величине противодействие
F12 F21
Подчеркнем, что силы,
связанные по 3 закону
Ньютона, приложены к различным телам и,
следовательно, никогда не могут начинаться в одной
точке
F12
F21
18.
Однако, третий закон справедлив не всегда. Онвыполняется в случае контактных взаимодействий,
т.е. при соприкосновении тел, а также при
взаимодействии тел, находящихся на расстоянии
друг от друга, но покоящихся друг относительно
друга.
c
Законы Ньютона плохо работают при
(релятивистская механика) а также, при движении
тел очень малых размеров, сравнимых с размерами
элементарных частиц. Так, например, нуклоны
внутри ядра, кварки внутри нуклонов, и даже
электроны внутри атома, не подчиняются законам
Ньютона.
19. 2.5. Импульс произвольной системы тел
Центр инерции или центр масс системыматериальных точек называют такую точку С
(рисунок 3.2), радиус-вектор которой:
m r 1
r
m r,
m
m
n
i 1
c
где m i 1 mi
системы.
n
i
i
n
i 1
n
i 1
i
i
(2.5.1)
i
– общая масса системы, n – число точек
Рисунок 3.2
20. Центр масс
Воображаемую точку С радиус-вектором1 n
rc ri mi
m i 1
где i - номер точки,
n - количество точек,
mi - масса i-ой точки и
m - масса всей системы точек
называют центром масс
системы материальных
точек
Z
K
O
X
rc
Y
21.
При этом не надо путать центр массс центром тяжести системы – с точкой
приложения
равнодействующей
сил
тяжести всех тел системы.
Центр тяжести совпадает с центром
масс (центром инерции), если g
(ускорение силы тяжести) для всех тел
системы одинаково (когда размеры
системы гораздо меньше размеров
Земли).
22.
Скорость центра инерции системы υ cn
n
d rc 1
d ri 1
υc
mi
mi υi.
dt m i 1 dt m i 1
(2.5.3)
n
p mi υi
i 1
p – импульс системы тел, υ – скорость i-го тела системы.
i
Так как
n
mi υi mυc
i 1
то импульс системы тел можно определить по формуле
p mυc
– импульс системы тел равен произведению
массы системы на скорость её центра инерции.
23.
Величинаpi mi υi
является первым динамическим
параметром частицы и
называется импульсом
Z
n
Pc m v c mi v i
K
называют импульсом центра
масс
O
Соответственно
величину
i 1
Таким образом видим, что
связь импульса Pc со
скоростью vc такая же, как
для материальной точки
с массой m (масса системы)
X
rc
Y
24. 2.6. Основное уравнение динамики поступательного движения произвольной системы тел
Тела, не входящие в состав рассматриваемойсистемы, называют внешними телами, а силы,
действующие на систему со стороны этих тел –
внешними силами. Силы взаимодействия между
телами внутри системы, называют внутренними
силами.
Результирующая всех внутренних сил
действующих на i-ое тело:
внутр. n
Fi
Fik Fi1 Fi 2 ... Fin ,
k i
где
k i – т.к. i-ая точка не может действовать сама на себя.
25.
Fвнеш.
Обозначим
– результирующая всех
внешних сил приложенных к i-ой точке системы.
По второму закону Ньютона можно записать
систему уравнений:
i
внеш.
d
m1υ1 F1 F12 F13 ... F1n ,
dt
внеш.
d
m2 υ2 F2 F21 F23 ... F2 n ,
dt
...............................,
внеш.
d
mn υn Fn Fn1 ... Fn,n 1.
dt
26.
Сложим эти уравнения и сгруппируем попарно силы F и F :ik
ki
n
d
внеш.
dt mi υi Fi F12 F21 ... Fn 1,n Fn,n 1 .
i 1
i 1
n
По третьему закону Ньютона, F F
поэтому все выражения в скобках в правой части
уравнения равны
нулю. Тогдаn остаётся:
n
ik
ki
внеш. dp
d
dt mi υi Fi dt .
i 1
i 1
n внеш.
Назовем F Fi
– главным вектором всех
внешних сил, i 1
тогда:
dp
F.
dt
(2.6.1)
27.
Скорость изменения импульса системы тел равнаглавному вектору всех внешних сил, действующих
на эту систему.
Это уравнение называют основным уравнением
динамики поступательного движения системы
тел.
Так как импульс системы
p m
d
m F
dt
dp
F
dt
c
то
c
Отсюда можно записать основное уравнение
динамики
поступательного
движения
системы тел в виде:
Здесь a
c
mac F
– ускорение центра инерции.
(2.6.3)
28.
mac F Центр механической системыдвижется как материальная точка, масса
которой равна массе всей системы, и на
которую действует сила, равная главному
вектору внешних сил, приложенных к системе.
На основании третьего закона Ньютона,
силы, действующие на тела системы со стороны
других тел системы (внутренние силы),
взаимно
компенсируют
друг
друга.
Остаются только внешние силы.
В общем случае движение тела можно
рассматривать как сумму двух
движений:
поступательного со скоростью υ υС
и
вращательного вокруг центра инерции.
29. Теорема о движении центра масс
Рассмотрим подробнее силы, действующие на частицы механическойсистемы
Силы, действующие на каждую точку
системы, разобьем на два типа
– внутренние силы
– результирующая всех внешних сил
В общем виде это можно записать так:
n 1
Fi Fik Fi вн
k 1
По 3 закону Ньютона Fik 0
i ,k
F1i
m2
m3
F13
F12
m1
(F1)вш
1 n
ac Fi вн
m i 1
mi
И теорема о движении центра
масс принимает вид
Если система находится во внешнем стационарном и
однородном поле, то никакими действиями внутри системы
невозможно изменить движение центра масс системы
30. 2.7. Закон сохранения импульса
Механическаясистема
называется
замкнутой (или изолированной), если на неё не
действуют внешние силы, т.е. она не
взаимодействует с внешними телами.
Строго говоря, каждая реальная система тел всегда
не замкнута, т.к. подвержена, как минимум воздействию
гравитационных сил. Однако если внутренние силы гораздо
больше внешних, то такую систему можно считать
замкнутой (например – Солнечная система).
Для замкнутой системы равнодействующий
вектор внешних сил тождественно равен нулю:
dp
F 0,
dt
(2.7.1)
31.
nотсюда
p mi υc const.
(2.7.2)
i 1
Это есть закон сохранения импульса: импульс
замкнутой системы не изменяется во времени.
Импульс системы тел может быть представлен в виде
произведения
массы тел на скорость центра
суммарной
инерции: p m c , тогда
m c const.
(2.7.3)
При любых процессах, происходящих в
замкнутых системах, скорость центра инерции
сохраняется неизменной.
Закон сохранения импульса является одним из
основных законов природы. Он был получен как следствие
законов Ньютона, но он справедлив и для микрочастиц и
для релятивистских скоростей, когда
c
32. 2.8. Виды и категории сил в природе
Одно из простейших определений силы:влияние одного тела (или поля) на другое,
вызывающее ускорение – это сила.
Однако, спор вокруг определения силы не
закончен до сих пор – это обусловлено трудностью
объединения в одном определении
сил,
различных по своей природе и характеру
проявления.
32
33.
В настоящее время,различают четыре типа сил или
взаимодействий:
• гравитационные;
• электромагнитные;
• сильные (ответственное за
связь частиц в ядрах) и
• слабые (ответственное за
распад частиц)
33
34.
Виды фундаментальных взаимодействий:1. Гравитационное
• Присуще всем материальным объектам.
• Определяется наличием у тел массы
• Подчиняется закону всемирного тяготения Ньютона
• Имеет неограниченный радиус действия. В области
микромира роль гравитационного взаимодействия ничтожно
мала.
2. Слабое
• Приводит к определенному виду нестабильности
элементарных частиц.
• Имеет ограниченный радиус действия
• Существенно только в области микромира.
35.
3. Электромагнитное• Возникает между телами, имеющими электрический заряд.
• Две составляющие: электрическая и магнитная.
• Неограниченный радиус действия.
• Образование атомов, молекул, макроскопических тел.
4. Ядерное или сильное взаимодействие
• Имеет конечный (~ 10-15 м) радиус действия
• Существенно только в микромире.
Если условно принять интенсивность
сильного взаимодействия за 1, то интенсивность
электромагнитного взаимодействия будет 10-2,
слабого взаимодействия 10-13,
а гравитационного 10-40.
36. I. Силы
dp ddv
F
mv m
ma
dt dt
dt
• Силы трения
• Силы гравитационные
• Силы тяжести (вес тела)
• Силы упругости
37. 2.9. Сила тяжести и вес тела
Одна из фундаментальных сил – силагравитации проявляется на Земле в виде силы
тяготения – сила, с которой все тела
притягиваются к Земле.
Вблизи поверхности Земли все тела падают
с одинаковым ускорением – ускорением
свободного падения g, (вспомним школьный опыт
– «трубка Ньютона»). Отсюда вытекает, что в
системе отсчета, связанной с Землей,
на всякое
тело действует сила тяжести mg
Она приблизительно равна силе гравитационного притяжения к
Земле (различие между силой тяжести и гравитационной силой
обусловлено тем, что система отсчета, связанная с Землей, не 37
вполне инерциальная).
38.
то есть вес и сила тяжести равны другдругу, но приложены к разным точкам: вес к
подвесу или опоре, сила тяжести – к самому
телу. Это равенство справедливо, если подвес
(опора) и тело покоятся относительно Земли (или
двигаются равномерно, прямолинейно). Если
имеет место движение с ускорением, то
справедливо соотношение:
P mg ma m( g a).
(2.9.1)
38
39.
P mg ma m( g a).Вес тела может быть больше или
меньше силы тяжести: если g и a
направлены в одну сторону (тело
движется вниз или падает), то
P mg
и если наоборот, то P mg
Если же тело движется
с
ускорением a g то P 0
–
т.е.
наступает
состояние
невесомости.
Пример: космический корабль на орбите.
39
40. 2.10. Упругие силы
Электромагнитные силы проявляютсебя как упругие силы и силы трения.
Под действием внешних сил возникают
деформации (т.е. изменение размеров и формы)
тел. Если после прекращения действия внешних
сил восстанавливаются прежние форма и
размеры тела, то деформация называется
упругой. Деформация имеет упругий характер в
случае, если внешняя сила не превосходит
определенного значения, которая называется
пределом упругости.
40
41.
При превышении этого предела деформациястановится
пластичной
или
неупругой,
т.е.
первоначальные размеры и форма тела полностью не
восстанавливается.
Рассмотрим упругие деформации.
В деформированном теле (рис) возникают упругие
силы, уравновешивающие внешние силы.
41
42.
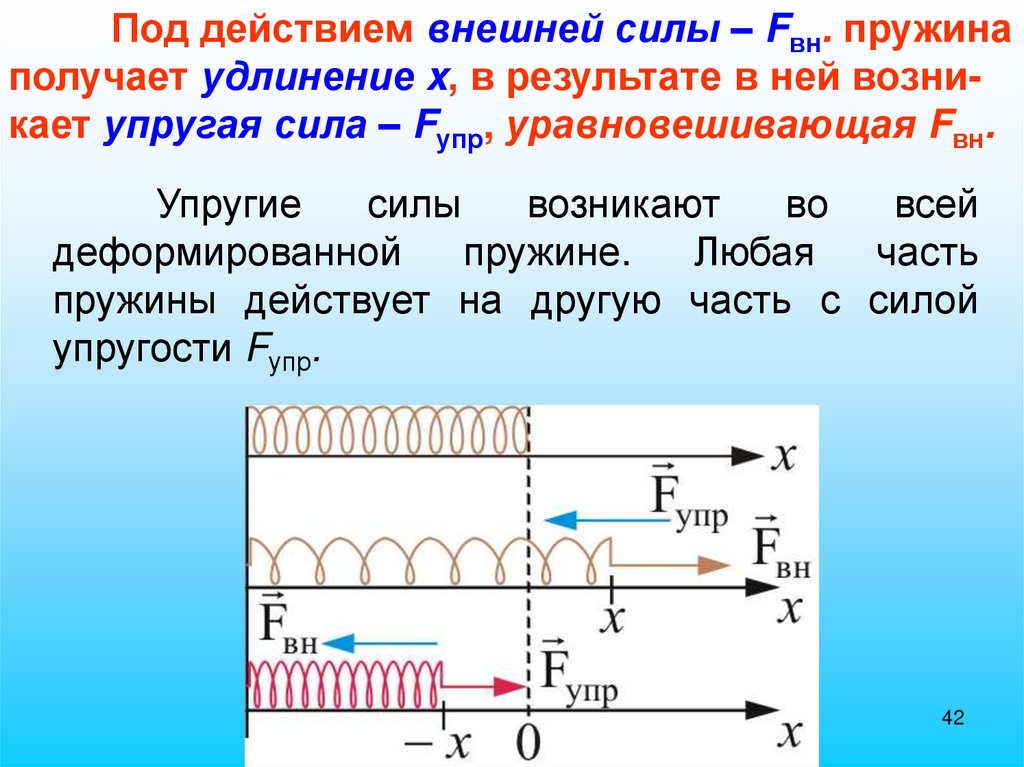
Под действием внешней силы – Fвн. пружинаполучает удлинение x, в результате в ней возникает упругая сила – Fупр, уравновешивающая Fвн.
Упругие
силы
возникают
во
всей
деформированной
пружине.
Любая
часть
пружины действует на другую часть с силой
упругости Fупр.
42
43.
Удлинение пружины пропорционально внешнейсиле и определяется законом Гука:
1
x Fвн. ,
k
k – жесткость пружины.
Видно, что чем больше k, тем меньшее удлинение
получит пружина под действием данной силы.
43
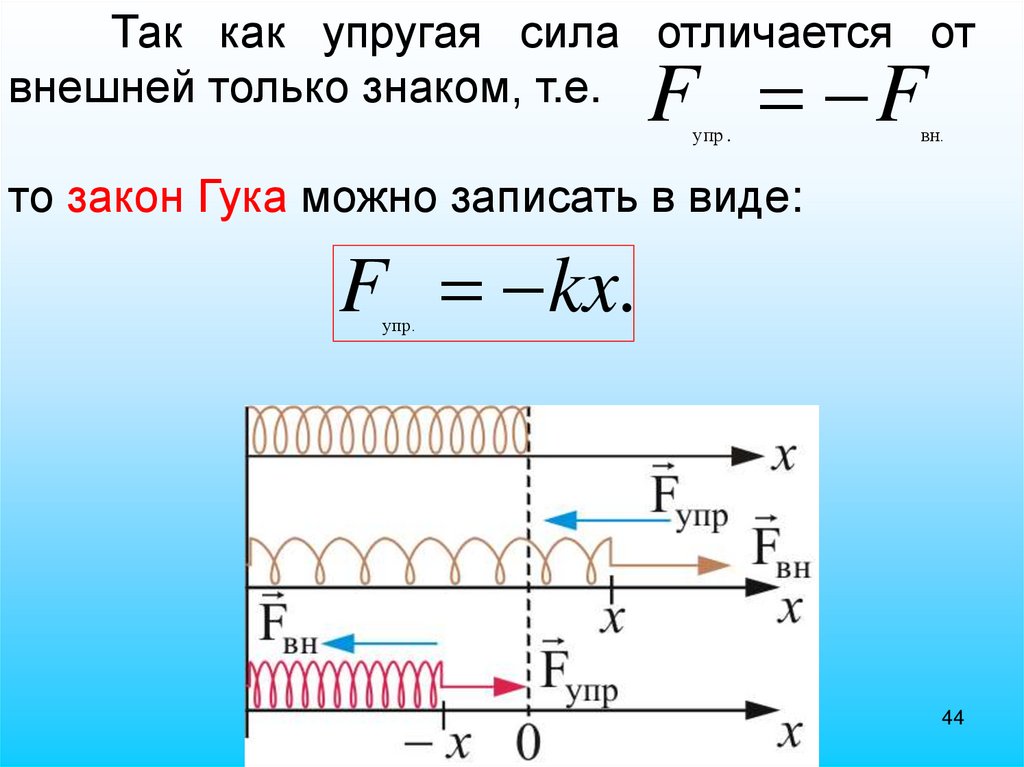
44.
Так как упругая сила отличается отвнешней только знаком, т.е.
F F
упр .
вн.
то закон Гука можно записать в виде:
F kx.
упр.
44
45.
Потенциальная энергия упругойпружины U равна работе, совершенной
над пружиной.
Так как сила не постоянна, то
элементарная работа равна dA Fdx
dA kxdx,
Тогда полная работа,
совершена пружиной, равна:
x
которая
kx
A dA kxdx
2
0
2
kx
U
2
2
45
46.
Закон Гука для стержняОдностороннее
(или
продольное)
растяжение (сжатие) стержня состоит в
увеличении
(уменьшении)
длины
стержня под действием внешней силы F
46
Рисунок 2.3
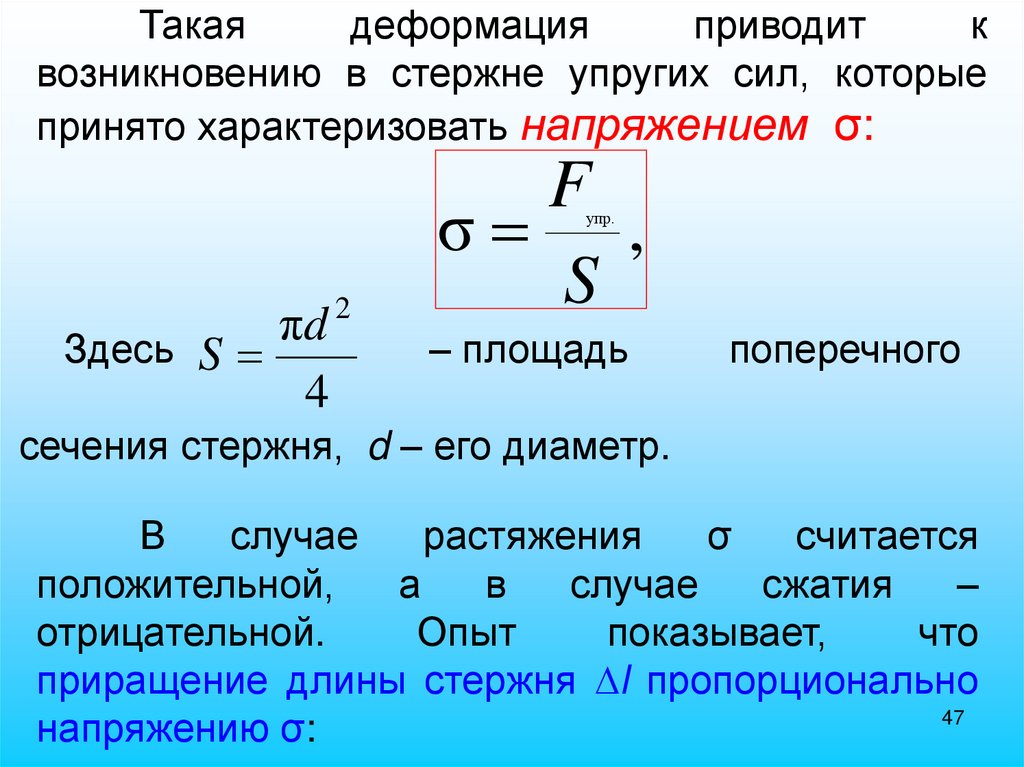
47.
Такаядеформация
приводит
к
возникновению в стержне упругих сил, которые
принято характеризовать напряжением σ:
F
σ ,
S
упр.
2
π
d
Здесь S
4
– площадь
поперечного
сечения стержня, d – его диаметр.
В
случае
растяжения
σ
считается
положительной,
а
в
случае
сжатия
–
отрицательной.
Опыт
показывает,
что
приращение длины стержня l пропорционально
47
напряжению σ:
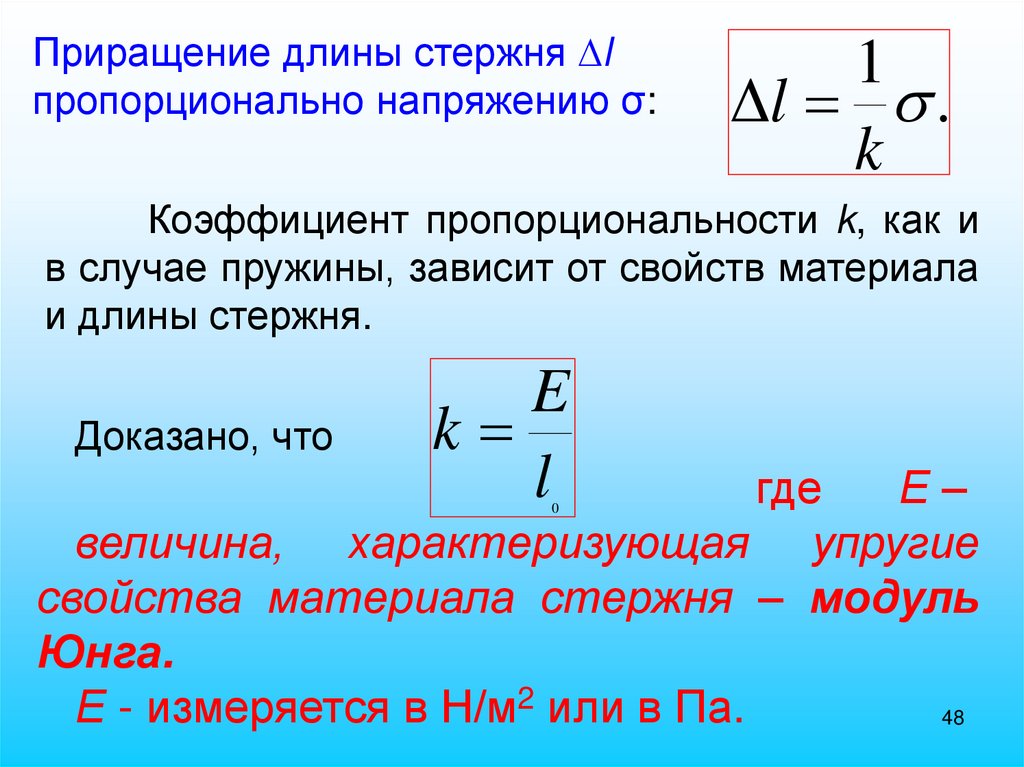
48.
Приращение длины стержня lпропорционально напряжению σ:
1
Δl .
k
Коэффициент пропорциональности k, как и
в случае пружины, зависит от свойств материала
и длины стержня.
Доказано, что
E
k
l
где
Е–
величина, характеризующая упругие
свойства материала стержня – модуль
Юнга.
Е - измеряется в Н/м2 или в Па.
48
0
49.
приращение длины:l
Δl ,
E
0
Δl
ε – относительное приращение длины,
l
0
1
ε σ
E
(2.10.2)
Закон
Гука
для
стержня:
относительное
приращение
длины
стержня
прямо
пропорционально
напряжению и обратно пропорционально
49
модулю Юнга.
50.
Растяжениеили
сжатие
стержней
сопровождается
соответствующим
изменением их поперечных размеров
Отношение относительного поперечного
Δd
d
сужения
(расширения)
стержня
к относительному
удлинению (сжатию) Δl
называют коэффициентом Пуассона
Δd Δl
M
: .
d l
l
50
(2.10.3)
51.
Объемная плотность потенциальнойэнергии тела
σ при растяжении
(сжатии) определяется удельной работой
по преодолению упругих сил Aупр
рассчитанной на единицу объема тела:
ω
σ
ωσ Aупр.
.
2E
2
(2.10.4)
51
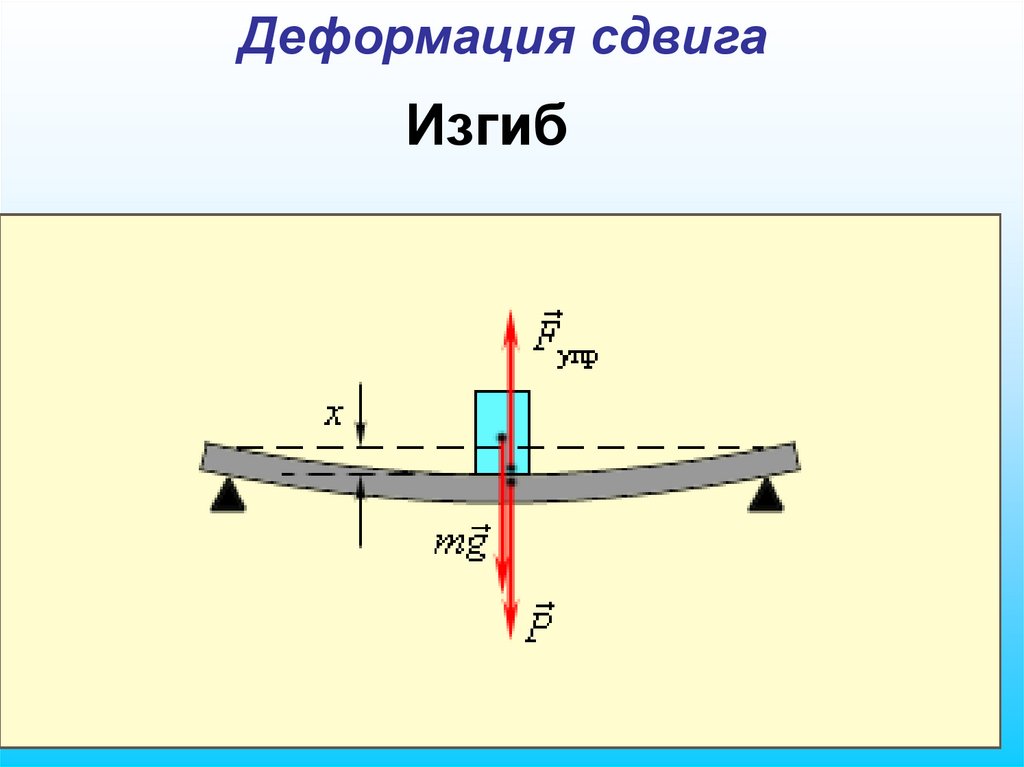
52.
Деформация сдвигаИзгиб
53.
Деформация сдвигаF приложенной
Под действием силы
касательно к верхней грани, брусок
получает
деформацию сдвига
Пусть АВ – плоскость сдвига
53
Рисунок 2.4
54. 2.11. Силы трения
Трение подразделяется на внешнее ивнутреннее.
Внешнее
трение
возникает
при
относительном
перемещении
двух
соприкасающихся
твердых
тел
(трение
скольжения или трение покоя).
Внутреннее трение наблюдается при
относительном перемещении частей одного и
того же сплошного тела (например, жидкость
или газ).
54
55.
Различают сухое и жидкое (или вязкое) трение.Жидким (вязким) называется трение
между
твердым
телом
и
жидкой
или
газообразной средой или ее слоями.
Сухое
трение,
в
свою
очередь,
подразделяется на трение скольжения и
трение качения.
55
56.
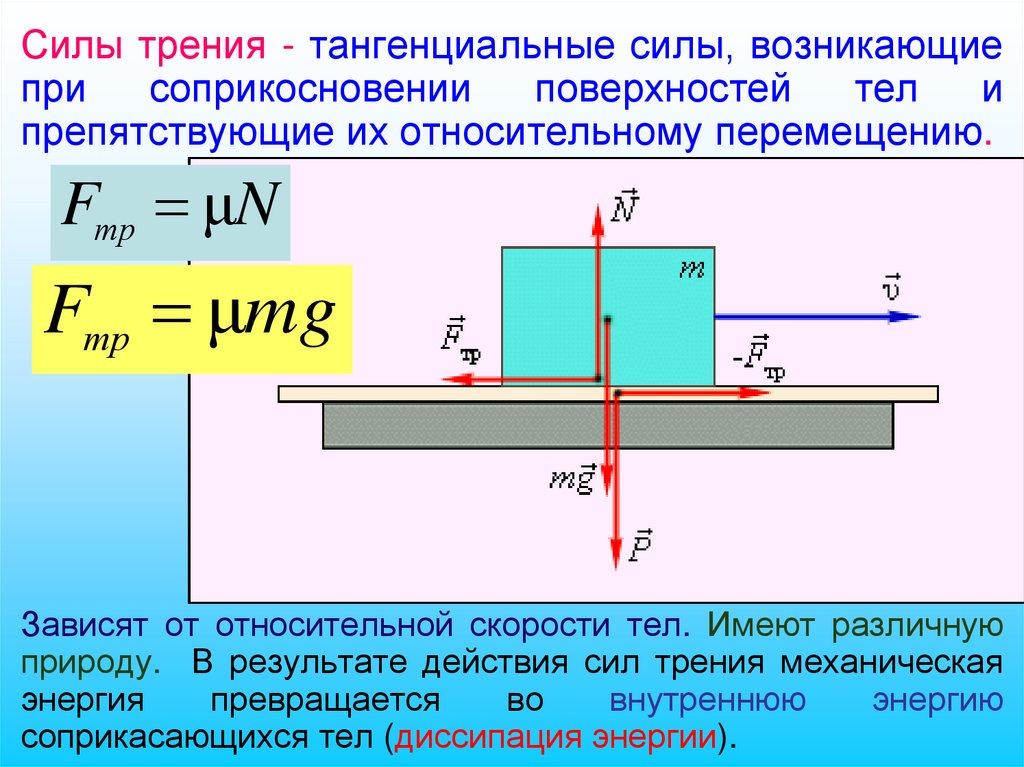
Силы трения - тангенциальные силы, возникающиепри
соприкосновении
поверхностей
тел
и
препятствующие их относительному перемещению.
Fтр μN
Fтр μmg
Зависят от относительной скорости тел. Имеют различную
природу. В результате действия сил трения механическая
энергия
превращается
во
внутреннюю
энергию
соприкасающихся тел (диссипация энергии).
57.
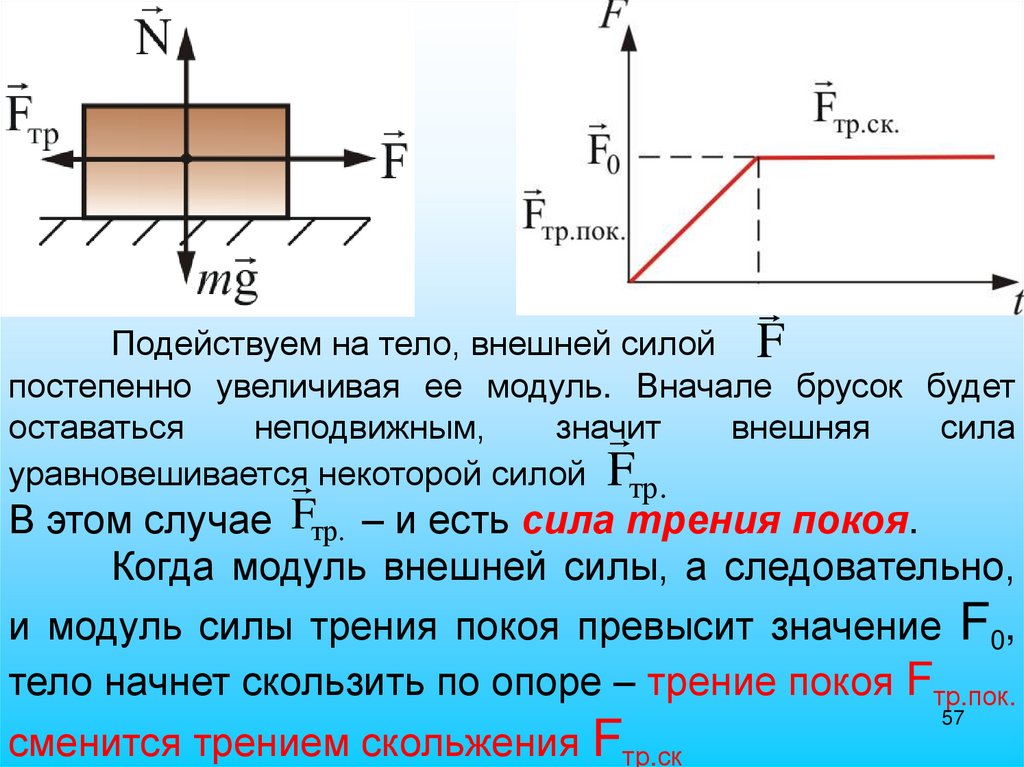
FПодействуем на тело, внешней силой
постепенно увеличивая ее модуль. Вначале брусок будет
оставаться
неподвижным,
значит
внешняя
сила
уравновешивается некоторой силой Fтр.
В этом случае Fтр. – и есть сила трения покоя.
Когда модуль внешней силы, а следовательно,
и модуль силы трения покоя превысит значение F0,
тело начнет скользить по опоре – трение покоя Fтр.пок.
сменится трением скольжения Fтр.ск
57
58.
Установлено, что максимальная сила тренияпокоя не зависит от площади соприкосновения тел и
приблизительно пропорциональна модулю силы
нормального давления N
F μ N,
0
0
μ0 – коэффициент трения покоя – зависит от
природы и состояния трущихся поверхностей.
Аналогично и для силы трения скольжения:
F μN
тр.
.
(2.11.1)
Трение
качения
возникает
между
шарообразным телом и поверхностью, по которой
оно катится. Сила трения качения подчиняется тем же
законам, что и скольжения, но коэффициент трения μ здесь
58
значительно меньше.
59.
5960. 2.12. Кинетическая энергия.
Уравнениедвижения
тела под
действием внешней силы F имеет вид:
d
m
F, или
dt
dυ
m Fτ .
dt
(2.12.1)
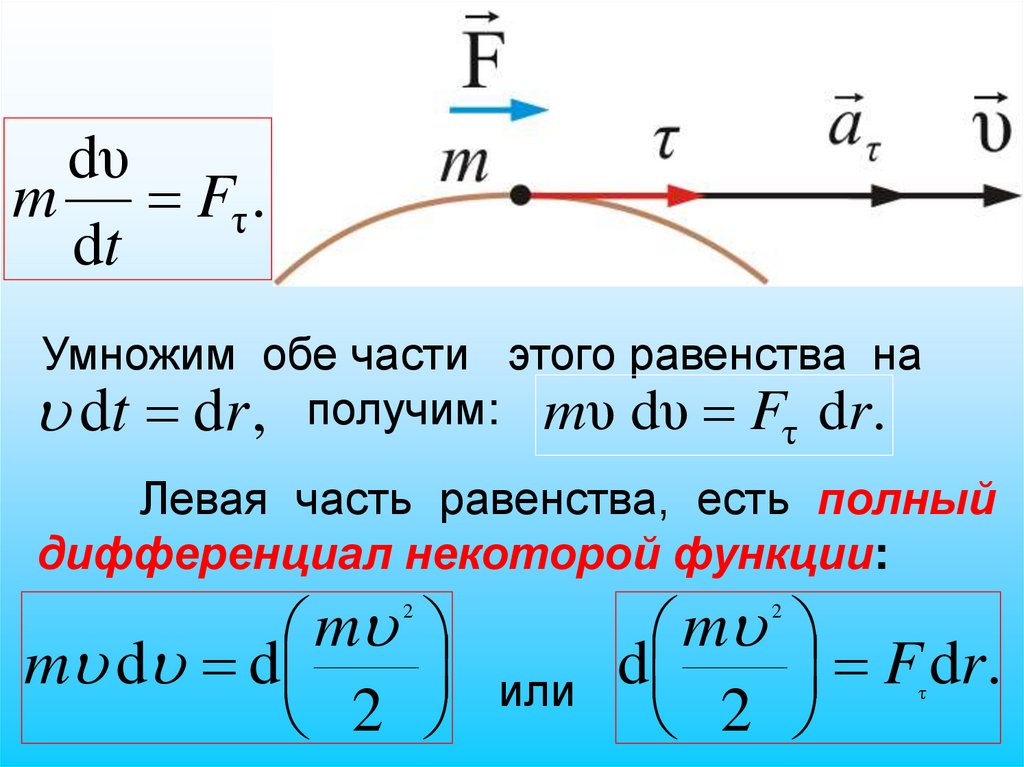
61.
dυm Fτ .
dt
Умножим обе части этого равенства на
dt dr , получим: mυ dυ Fτ dr.
Левая часть равенства, есть полный
дифференциал некоторой функции:
m
m d d
2
2
m
d
F
d
r
.
или
2
2
τ
62.
Т.о.m
d
F dr.
2
2
τ
Если система замкнута, то F
m
F 0, тогда и d
0.
2
внеш.
0 и
2
Если
полный
дифференциал
некоторой
функции,
описывающей
поведение системы равен нулю, то эта
функция
может
служить
характеристикой состояния данной
системы.
63.
Функциясостояния
системы,
определяемая только скоростью ее
движения, называется кинетической
энергией.
2
m
K
.
2
(2.12.2)
Кинетическая энергия системы есть
функция состояния движения этой системы.
K – аддитивная величина:
m
K
,
2
2
n
i
i 1
i
64.
Энергия измеряется в СИ в единицахпроизведения силы на расстояние, т.е.
в ньютонах на метр: 1 Н м 1Дж
Кроме того, в качестве единицы
измерения
энергии
используется
внесистемная единица – электронвольт (эВ): 1 эВ = 1,6 10-19 Дж.
65.
Связь кинетической энергии с импульсом p.m m m
,
2 m 2m
2
Т.к.
2
p
K
.
2m
2
2
отсюда
66.
Связь кинетической энергии с работой.Если постоянная сила действует на
тело, то оно будет двигаться в направлении
силы. Тогда, элементарная работа по
перемещению тела из т. 1 в т. 2, будет равна
произведению силы F на перемещение dr :
dA Fdr
67.
Следовательно,работа
силы
приложенной к телу на пути r численно
равна изменению кинетической энергии
этого тела:
(2.12.4)
A K .
Или
изменение
кинетической
энергии dK равно работе внешних сил:
dK dA.
Работа, так же как и кинетическая
энергия, измеряется в джоулях.
68.
Скорость совершения работы (передачиэнергии) называется мощность.
Мощность
есть
работа,
совершаемая в единицу времени.
Мгновенная
или
мощность
dr
N F F .
dt
Средняя мощность
dA
N
dt
A
N .
t
Измеряется мощность в ваттах. 1 Вт = 1 Дж/с.
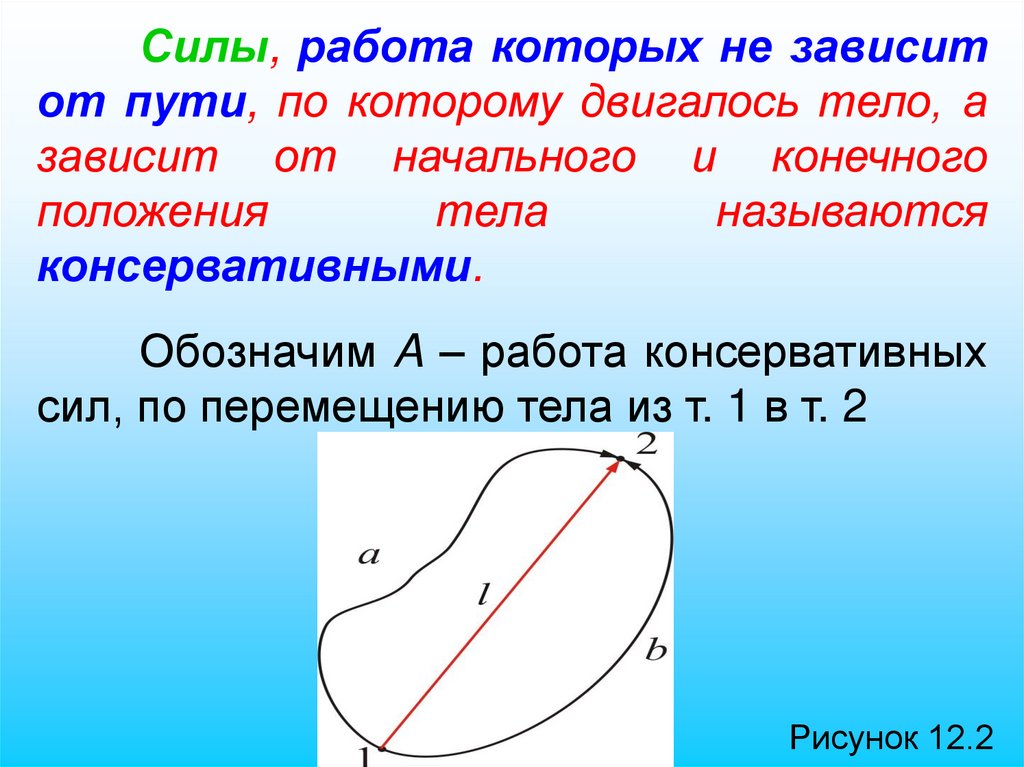
69.
Силы, работа которых не зависитот пути, по которому двигалось тело, а
зависит от начального и конечного
положения
тела
называются
консервативными.
Обозначим A – работа консервативных
сил, по перемещению тела из т. 1 в т. 2
Рисунок 12.2
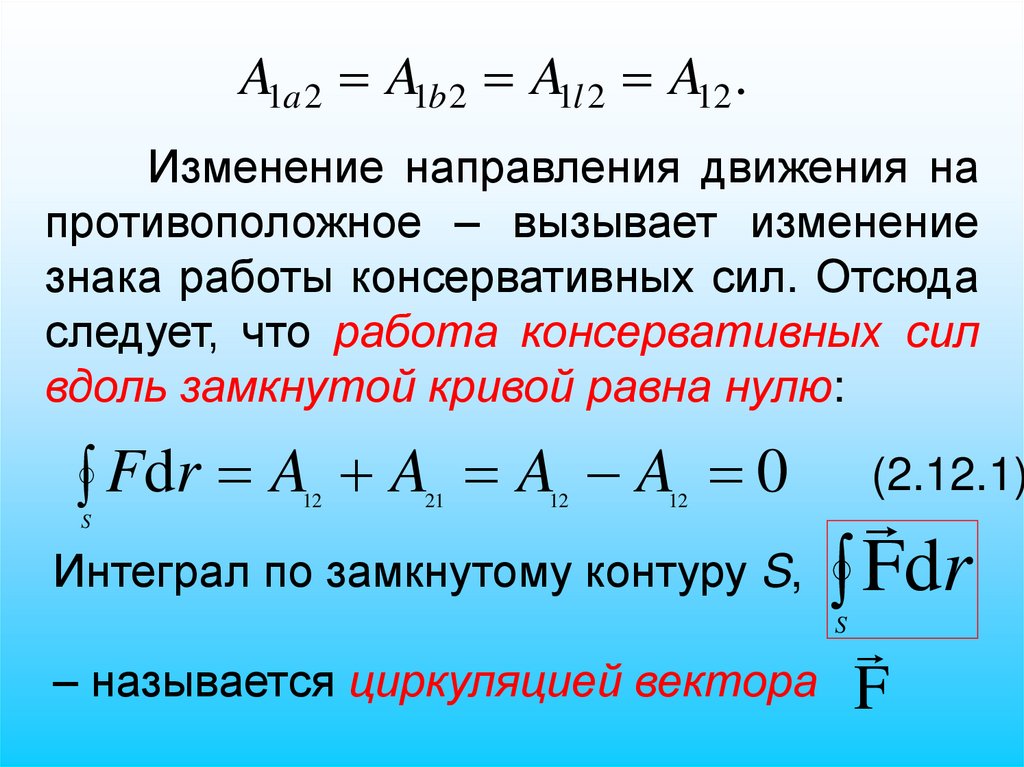
70.
A1a 2 A1b 2 A1l 2 A12 .Изменение направления движения на
противоположное – вызывает изменение
знака работы консервативных сил. Отсюда
следует, что работа консервативных сил
вдоль замкнутой кривой равна нулю:
Fdr A A A A 0
(2.12.1)
Интеграл по замкнутому контуру S, Fdr
12
21
12
12
S
– называется циркуляцией вектора F
S
71.
Еслициркуляция
какого-либо
вектора силы равна нулю, то эта сила
консервативна.
Консервативные силы: сила тяжести,
электростатические силы, силы центрального
стационарного поля.
Неконсервативные силы: силы
трения, силы вихревого электрического поля.
Консервативная система – такая,
внутренние
силы
которой
только
консервативные, внешние – консервативны
и стационарны.
Пример
консервативных
сил
–
гравитационные силы.
72. 2.13. Потенциальная энергия
Если на систему материальных телдействуют консервативные силы, то
можно ввести понятие потенциальной
энергии.
Работа, совершаемая консервативными
силами при изменении конфигурации
системы, то есть при изменении положения
тел относительно системы отсчета, не
зависит от того, как было осуществлено это
изменение. Работа определяется только
начальной и конечной конфигурациями
системы:
73.
A U U ,12
1
2
(2.13.1)
здесь потенциальная энергия U (х, у, z) –
функция состояния системы, зависящая
только от координат всех тел системы
в поле консервативных сил.
Итак, K – определяется скоростью
движения тел системы, а U – их взаимным
расположением.
Из (2.13.1) следует, что работа
консервативных
сил
равна
убыли
потенциальной энергии:
dA dU .
74.
Потенциальная энергия упругойдеформации (пружины)
Найдём работу, совершаемую при
деформации упругой пружины.
Сила упругости Fупр kx,
Сила
непостоянна, поэтому элементарная работа
dA Fdx kxdx
знак минус говорит о том, что работа
совершена над пружиной.
kx kx
A dA kxdx
,
2
2
x2
x1
2
2
1
2
(2.13.4)
75. 2.14. Закон сохранения механической энергии
Закон сохранения сводит воединорезультаты, полученные нами раньше.
В сороковых годах девятнадцатого века
трудами Р. Майера, Г. Гельмгольца и Дж.
Джоуля (все в разное время и независимо
друг от друга) был доказан закон
сохранения и превращения энергии.
76.
Для консервативной системычастиц полная энергия системы:
E K U
внутр.
U
Для
механической
сохранения
звучит
внеш .
const
энергии
закон
так:
полная
механическая
энергия
консервативной системы материальных
точек остаётся постоянной.
77.
Для замкнутой системы,т.е. для системы на которую не действуют
внешние силы, можно записать:
(2.14.2)
E K U
т.е. полная
внутр.
const
механическая энергия
замкнутой системы материальных
точек, между которыми действуют
только
консервативные
силы,
остаётся постоянной.
78.
Если в замкнутой системе действуютнеконсервативные силы, то полная
механическая энергия системы не
сохраняется – частично она переходит в
другие виды энергии – неконсервативные.
Система, в которой механическая
энергия переходит в другие виды
энергии, называется
диссипативной,
а сам процесс перехода называется
диссипацией энергии.
79. Применение законов сохранения . Абсолютно упругий центральный удар
При абсолютно неупругом ударе законсохранения механической энергии не
работает.
Применим
закон
сохранения
механической энергии для расчета скорости
тел при абсолютно упругом ударе – это
такой удар, при котором не происходит
превращения механической энергии в
другие виды энергии.
80. Удар частиц
Ударом точечных частиц будем называтьтакое механическое взаимодействие
- при непосредственном контакте
- за бесконечно малое время
при котором частицы обмениваются
- энергией и
- импульсом
при условии, что
система частиц остается замкнутой
--------------------------------------------------------Различают два вида ударов
абсолютно неупругий удар
такой удар, при котором после удара частицы
движутся как единое целое
и абсолютно упругий удар
удар, при котором после удара частицы
движутся с различными скоростями и в
течении удара выполняются законы сохранения
(энергии и импульса)
p'1
E12
p'2
E21
Абсолютно упругий удар бывает двух типов
- нецентральный удар
- центральный удар
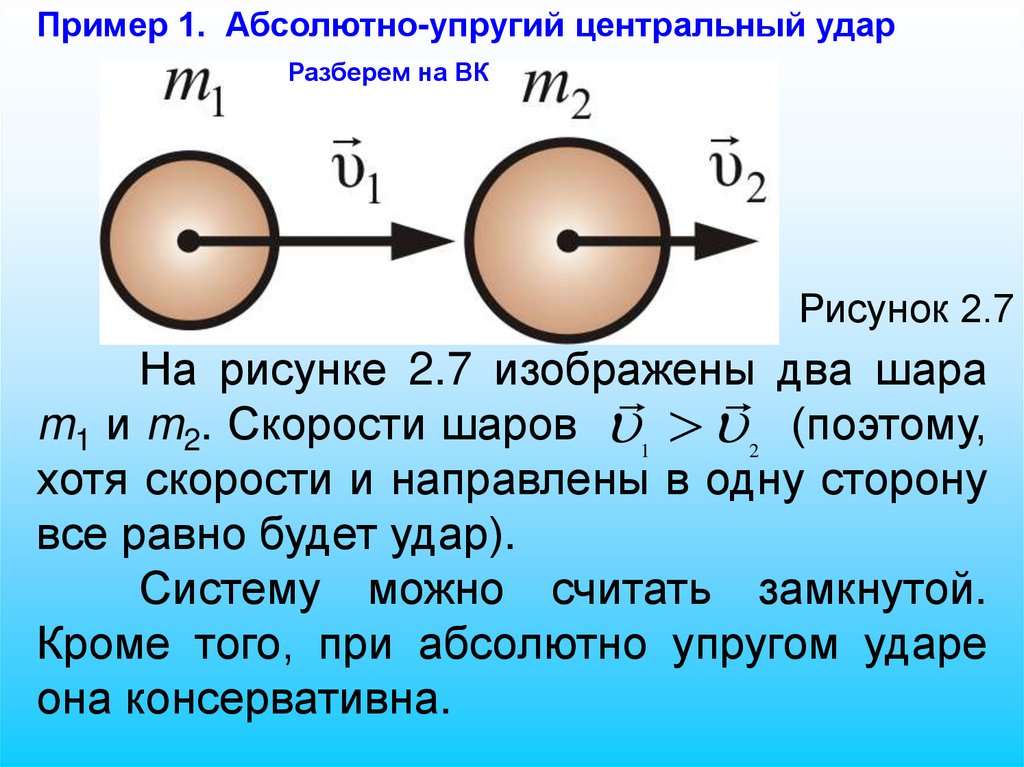
81.
Пример 1. Абсолютно-упругий центральный ударРазберем на ВК
Рисунок 2.7
На рисунке 2.7 изображены
два
шара
m1 и m2. Скорости шаров 1 2 (поэтому,
хотя скорости и направлены в одну сторону
все равно будет удар).
Систему можно считать замкнутой.
Кроме того, при абсолютно упругом ударе
она консервативна.
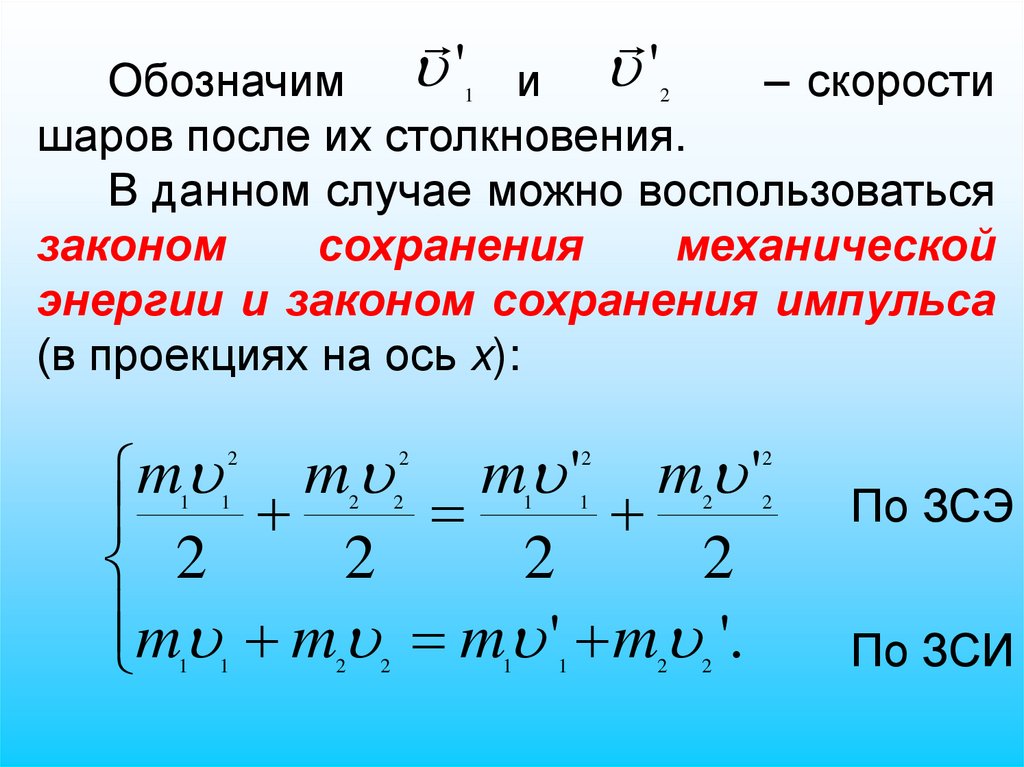
82.
Обозначим '1 и '2– скорости
шаров после их столкновения.
В данном случае можно воспользоваться
законом
сохранения
механической
энергии и законом сохранения импульса
(в проекциях на ось x):
m m m ' m '
2
2
2
2
m m m ' m '.
2
1
1
1
1
2
2
2
2
2
2
1
1
1
1
2
2
2
2
2
По ЗСЭ
По ЗСИ
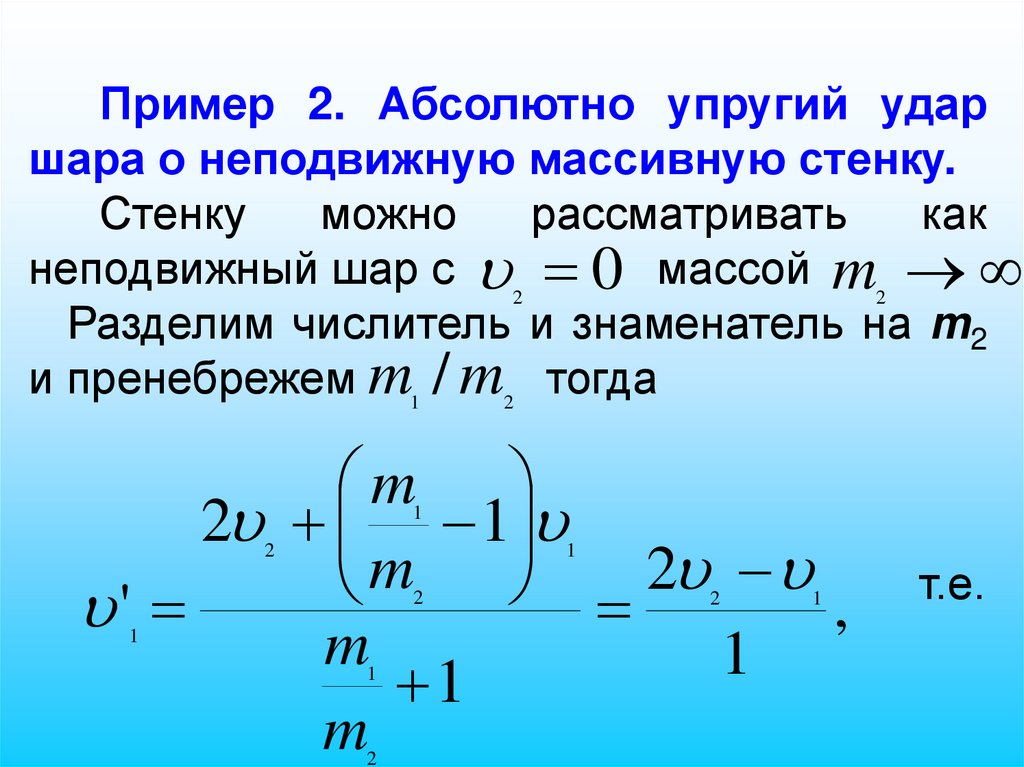
83.
Пример 2. Абсолютно упругий ударшара о неподвижную массивную стенку.
Стенку
можно
рассматривать
как
неподвижный шар с 2 0 массой m2
Разделим числитель и знаменатель на m2
и пренебрежем m1 / m2 тогда
m
2 1
m
2
'
,
m
1
1
m
1
2
1
2
1
1
2
2
1
т.е.
84. Пример 3. Абсолютно неупругий удар
Абсолютно неупругий удар –это столкновение двух тел, в
результате
которого
тела
объединяются и двигаются дальше,
как единое целое.
Продемонстрировать
абсолютно
неупругий удар можно с помощью
шаров
из
пластилина
(глины),
движущихся навстречу друг другу.
υ2
m2
85.
Если массы шаров m1 и m2, их скоростидо удара 1 и 2
то используя закон
сохранения импульса, можно записать
–
m m (m m )
1
1
2
2
1
2
скорость движения
неупругого удара:
m m
.
m m
1
1
2
1
2
2
шаров
после
86.
Итак, скорость слипшихсяшаров после неупругого удара
m m
.
m m
1
1
2
1
2
2
Если шары двигались навстречу друг
другу, то они вместе будут продолжать
двигаться в ту сторону, в которую двигался
шар, обладающий большим импульсом.
В частном случае, если массы и
скорости шаров равны, то
1
2
2
0
Выясним, как меняется кинетическая
энергия
шаров
при
центральном
абсолютно неупругом ударе.
87.
Так как в процессе соударения шаровмежду ними действуют силы, зависящие не
от самих деформаций, а от их скоростей, то
мы имеем дело с силами, подобными
силам трения, поэтому закон сохранения
механической
энергии
не
должен
соблюдаться.
Вследствие деформации происходит
«потеря»
кинетической
энергии,
перешедшей в тепловую или другие формы
энергии (диссипация энергии). Эту
«потерю» можно определить по разности
кинетических энергий до и после удара:
88.
«Потеря» кинетической энергии,(диссипация энергии).
m m (m m )
K
2
2
2
2
1
2
1
2
2
1
2
2
Отсюда, получаем
mm
.
K
2(m m )
(5.6.3)
Если
ударяемое
тело
первоначально неподвижно 2 0
было
то
1
2
2
1
1
2
2
m
m m
, K
.
m m
m m 2
2
1
1
1
2
2
1
1
2
1