


 Физика
ФизикаПохожие презентации:



")
")

")



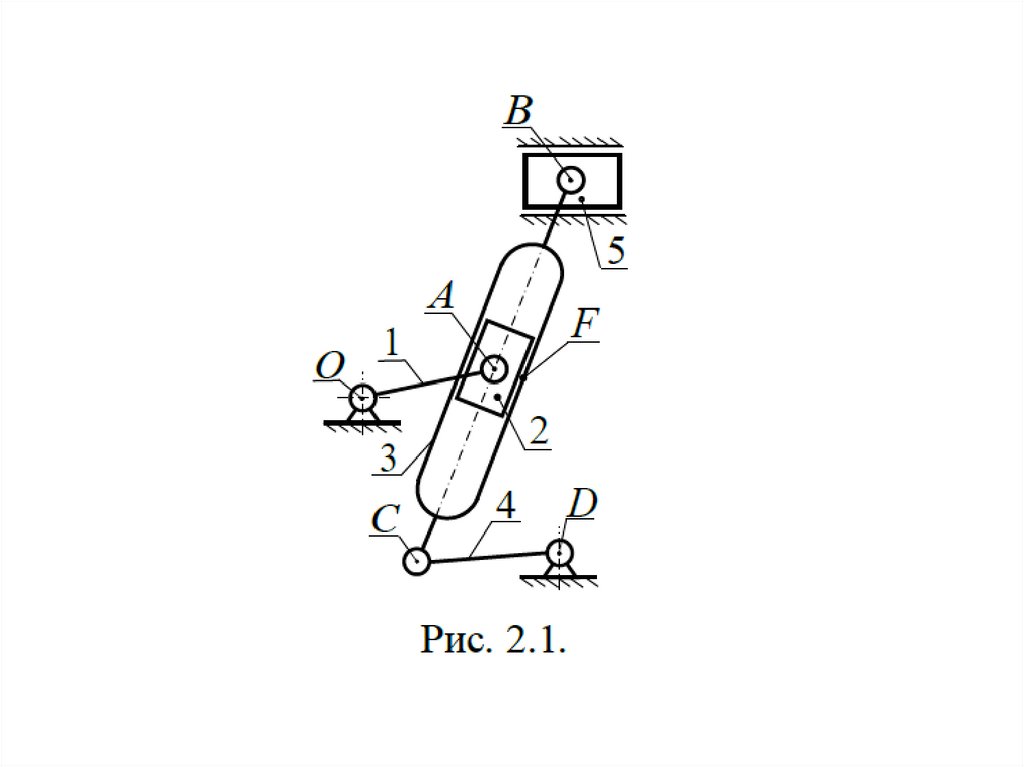
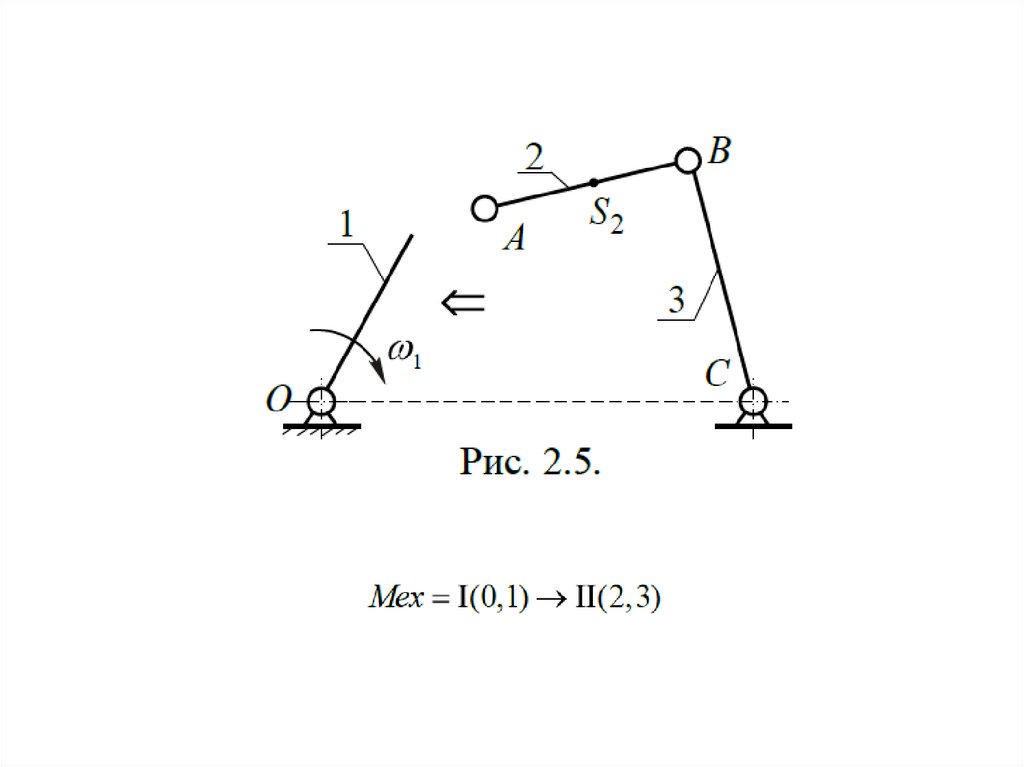
Кінематичний аналіз механізмів (лекція 3)
1. Кінематичний аналіз механізмів
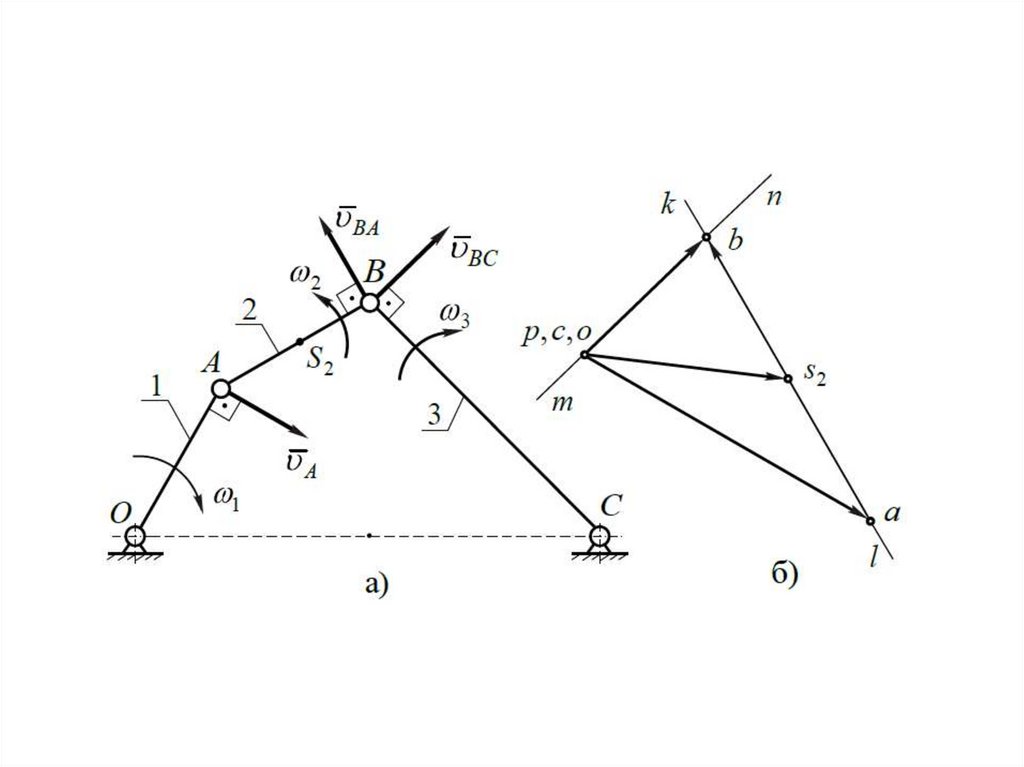
Задачі і методи кінематичного аналізумеханізмів
2.
3.
• Якщо дві точки належать одній ланці,то рівняннями руху однієї точки відносно
другої будуть рівняння плоского руху,
оскільки в загальному випадку в складі
плоского механізму ланка може так
рухатися.
4.
• Швидкості (прискорення) центрівобертальної кінематичної пари у двох
ланок повинні бути рівними між собою,
інакше один центр повинен зміститися
відносно другого, що неможливо.
• У поступальній кінематичній парі точка
однієї ланки може рухатися відносно точки
другої ланки уздовж направляючих пари,
тобто маємо складний рух однієї точки
відносно другої.
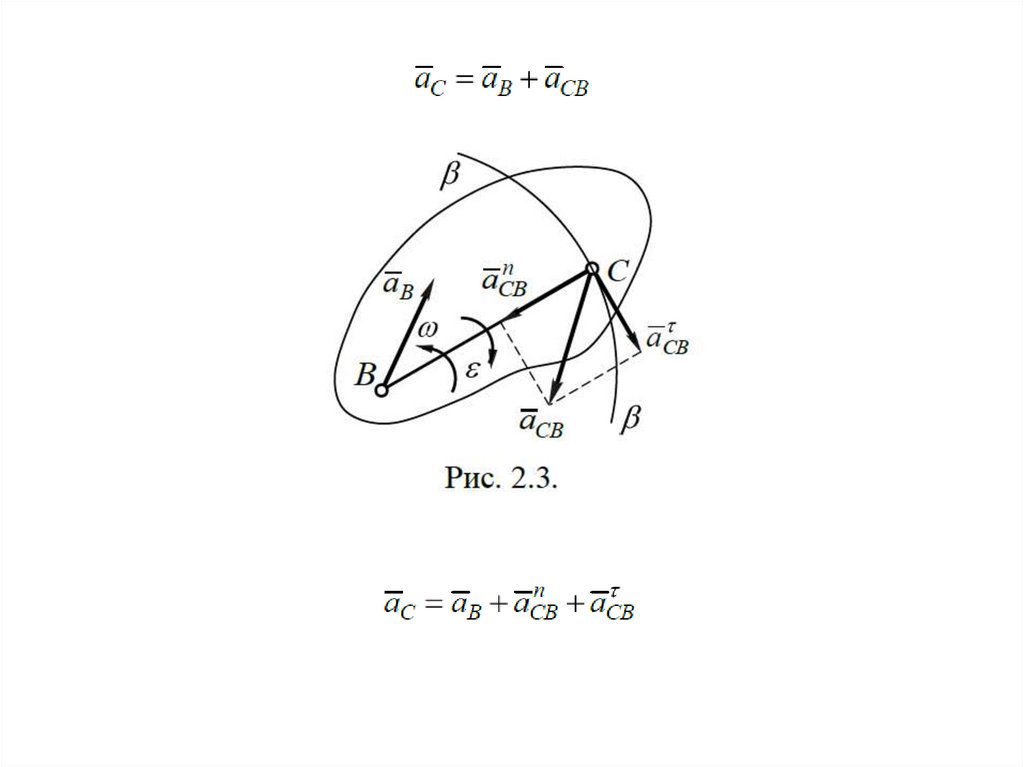
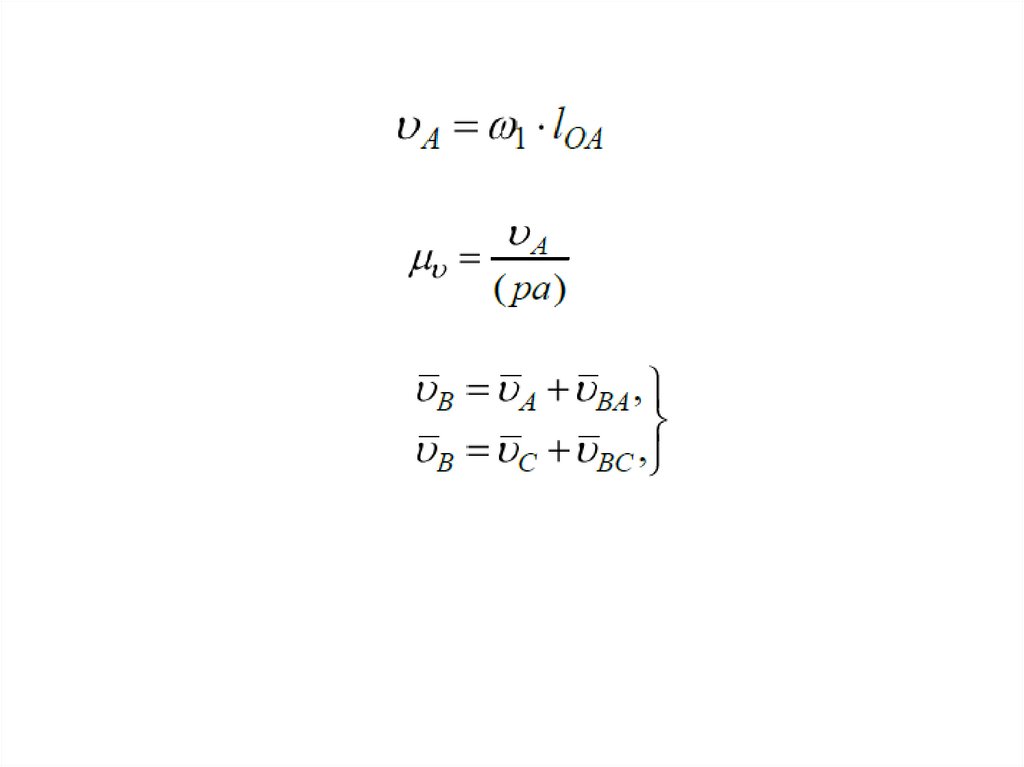
5. Основні рівняння, які пов'язують швидкості і прискорення двох точок, що належать одній ланці
Основні рівняння, які пов'язують швидкостіі прискорення двох точок, що належать
одній ланці
6.
7. Кінематичний аналіз групи Ассура І класу 1 виду
8.
9.
10.
11.
12.
13.
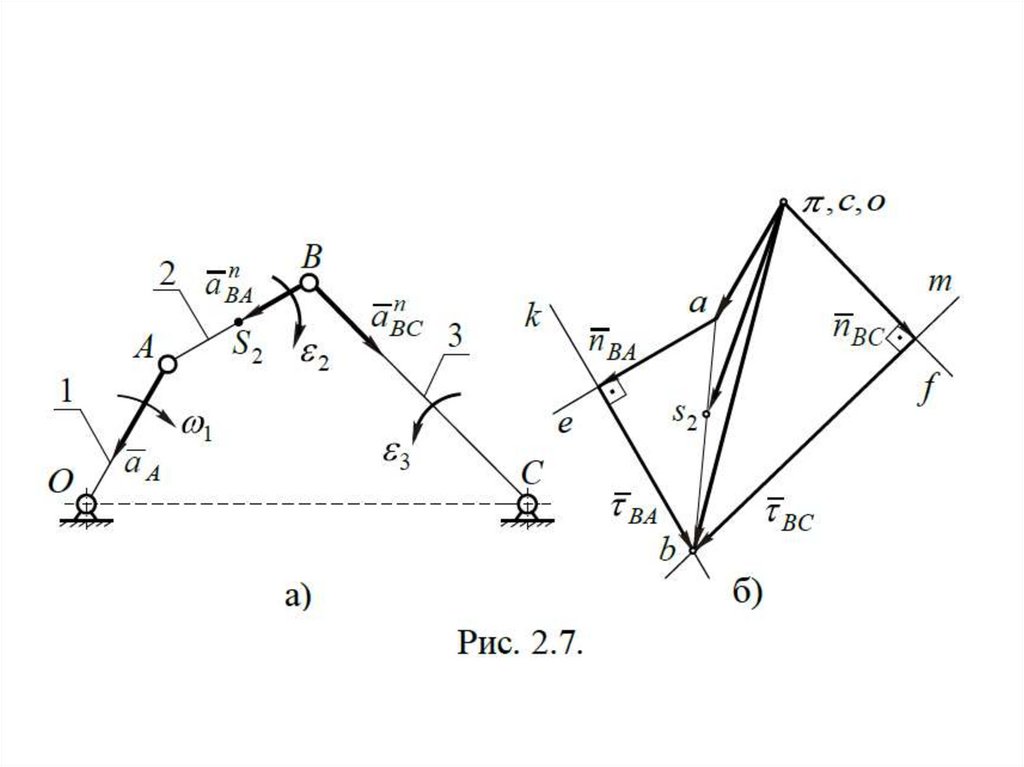
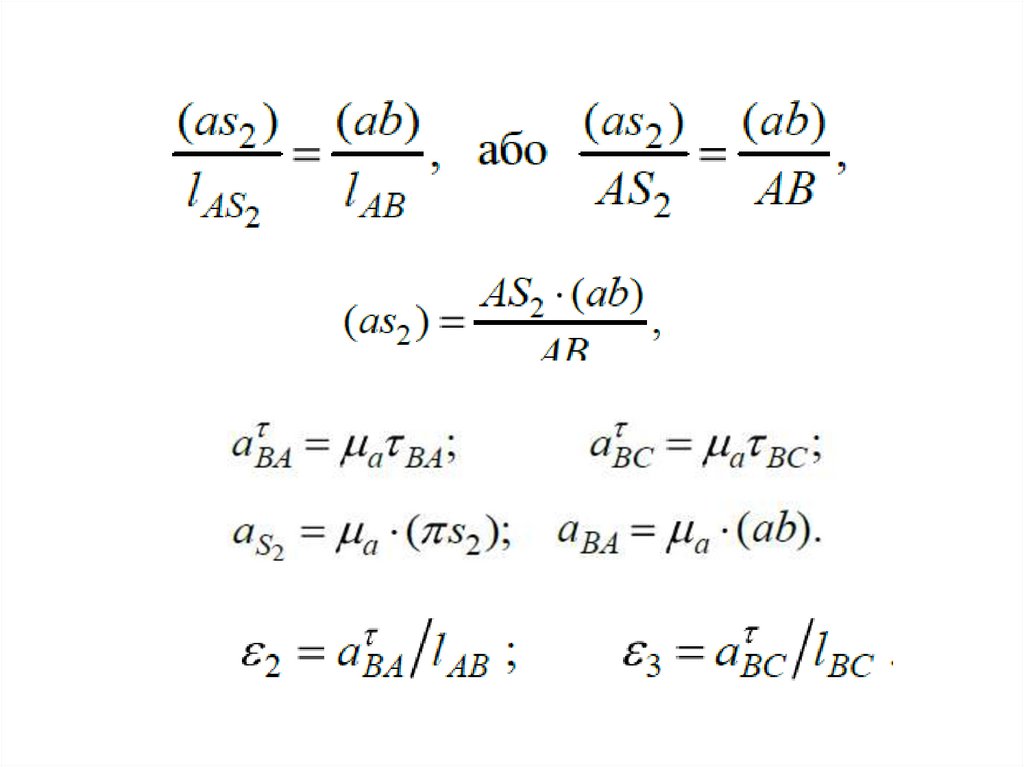
• вектори, що виходять з полюса, зображаютьабсолютні прискорення відповідних точок
механізму в масштабі плану прискорень. Точки
плану прискорень, що відповідають точкам
механізму, прискорення яких дорівнюють
нулю, збігаються з полюсом;
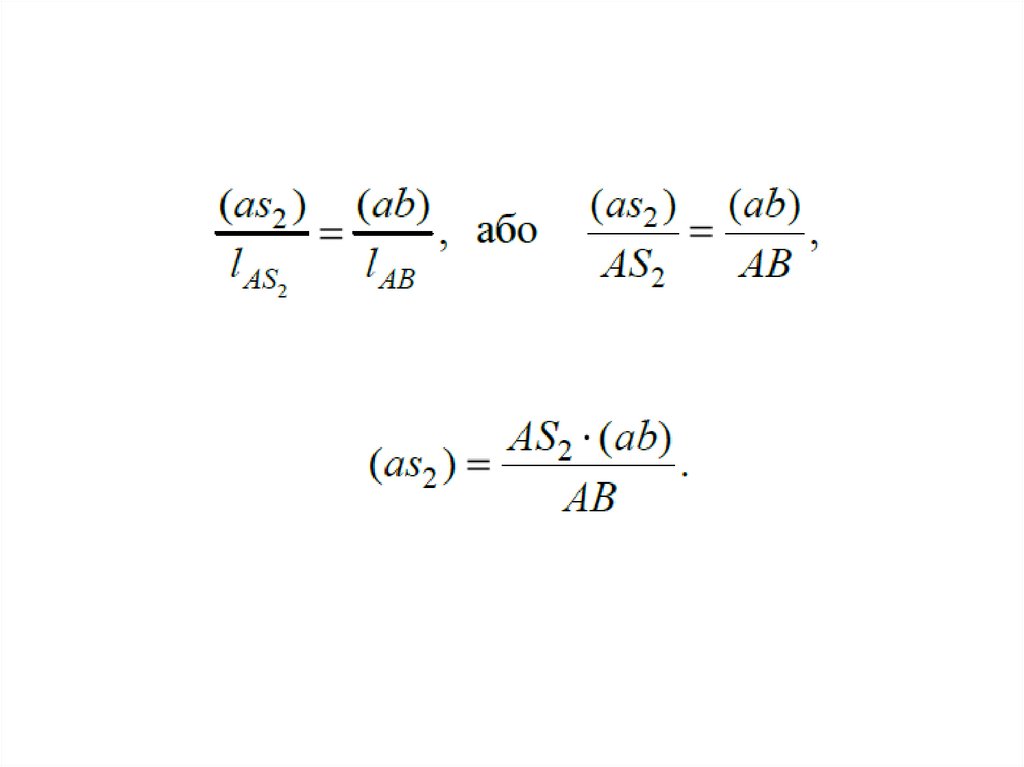
• фігура на плані прискорень, утворена
векторами відносних прискорень, подібна до
фігури на ланці, яка утворена відрізками, що
з'єднують відповідні точки.