



 Физика
ФизикаПохожие презентации:







")


Кинематика твердого тела
1.
Кинематика твердого тела – изучает движение твердого тела, кинематика точки используется для получения новых зависимостей иформул.
Существует пять видов движения твердого тела:
1. Поступательное (ползун, поршень насоса, спарник колес паровоза, движущегося по прямолинейному пути, кабина лифта, дверь купе,
кабина колеса обозрения).
2. Вращательное (маховик, кривошип, коромысло, колесо обозрения, обычная дверь).
3. Плоскопараллельное или плоское (шатун, колесо локомотива при качении по прямолинейному рельсу, шлифовальный круг).
4. Сферическое (гироскоп, шаровая стойка).
5. Общий случай движения или свободный полет (пуля, камень, небесное тело)
Поступательное движение твердого тела – такое движение при котором любая прямая, жестко связанная с телом, остается
параллельной самой себе. Обычно поступательное движение отождествляется с прямолинейным движением его точек, однако это не
так. Точки и само тело (центр масс тела) могут двигаться по криволинейным траекториям, см. например, движение кабины колеса
обозрения.
Теорема о поступательном движении твердого тела – При поступательном движении твердого тела все его точки описывают
тождественные траектории и имеют в каждый момент времени геометрически равные скорости и ускорения.
Проведем радиус-векторы к двум точкам A и B, а также соединим эти точки вектором rBA.
В любой момент времени выполняется векторное равенство:
В любой момент времени вектор rBA остается постоянным по направлению
(по определению поступательного движения) и по величине
rA (t ) rB (t ) const ,
(расстояние между точками не изменяется).
Отсюда:
и это означает, что в каждый момент времени положение точки A отличается от положения
Таким
твердого
тела полностью
точкиобразом,
B на однупоступательное
и ту же величинудвижение
rBA = const,
т.е. траектории
этих двух определяется
точек тождественны
движением
одной
точки,
принадлежащей
этому
телу
и
выбранной
произвольным образом.
(совпадают друг с другом при наложении).
Все параметры движения этой точки (траектория, скорость и ускорение) описываются
drA (t ) drB (t )
уравнениями
и соотношениями
кинематики
точки.часть соотношения:
Продифференцируем
по времени
левую и правую
vA
A
aA
rA
rA
rBA
rBA
vB
dt
B
rB
rB
C
rA (t ) rB (t ) rBA.
aB
dt
и это означает, что в каждый момент времени скорость точки A равна геометрически
(т.е. векторно) скорости точки B.
v (t ) v (t ).
A
B
Второе дифференцирование по времени приводит к соотношению:
dr 2 A (t ) dr 2 B (t )
dt 2
dt 2
и это означает, что в каждый момент времени ускорение точки A равно геометрически
(т.е. векторно) ускорению точки B.
aA (t ) aB (t ).
5
2.
Вращательное движение твердого тела – движение при котором все его точки движутся в плоскостях, перпендикулярных некоторойнеподвижной прямой, и описывают окружности с центрами, лежащими на этой прямой, называемой осью вращения.
P
Задание вращательное движения – движение задается законом изменения двугранного угла
φ (угла поворота), образованного неподвижной плоскостью P, проходящей через ось
вращения, и плоскостью Q, жестко связанной с телом:
(t ) - уравнение вращательного движения
Угловая скорость – величина, характеризующая быстроту изменения угла поворота.
ω
ε
t
;
t1 t Δt 1 Δ ;
Q
Δ
ср - средняя угловая скорость в интервале времени t,
Δt
Устремим t 0 и перейдем к пределу:
Δt lim 0
Δ
d
Δt
dt
Если dφ/dt > 0, то вращение происходит в сторону увеличения угла поворота,
если dφ/dt < 0, то вращение происходит в сторону уменьшения угла поворота.
Угловое ускорение – величина, характеризующая быстроту изменения угловой скорости.
t
;
t1 t Δt 1 Δ ;
Δ
ср - среднее угловое ускорение в интервале времени t,
Δt
d
Δ
- истинное угловое ускорение
Устремим t 0 и перейдем к пределу: Δt lim 0
в момент времени t
dt
Δt
- истинная угловая скорость
в момент времени t
Угловая скорость
изображается дуговой
стрелкой в сторону
вращения.
Угловое ускорение
изображается дуговой
стрелкой в сторону
увеличения угла поворота
при
0 .
Если d2φ/dt2 и dφ/dt одного знака, то скорость увеличивается по модулю и вращение называется ускоренным (дуговые стрелки угловой скорости
и углового ускорения направлены в одну сторону),
если d2φ/dt2 и dφ/dt разного знака, то скорость уменьшается по модулю и вращение называется замедленным (дуговые стрелки угловой скорости
и углового ускорения направлены в противоположные стороны).
const.
Равномерное вращение – угловая скорость не изменяется по величине.
Равнопеременное вращение – угловое ускорение не изменяется по величине.
const.
d
;
dt
t
0
0
d dt;
0 t.
d
;
dt
d
;
dt
t
0
0
t
0
0
d dt;
d ( 0 t )dt;
0 t.
0 0t
t2
.
2
6
3.
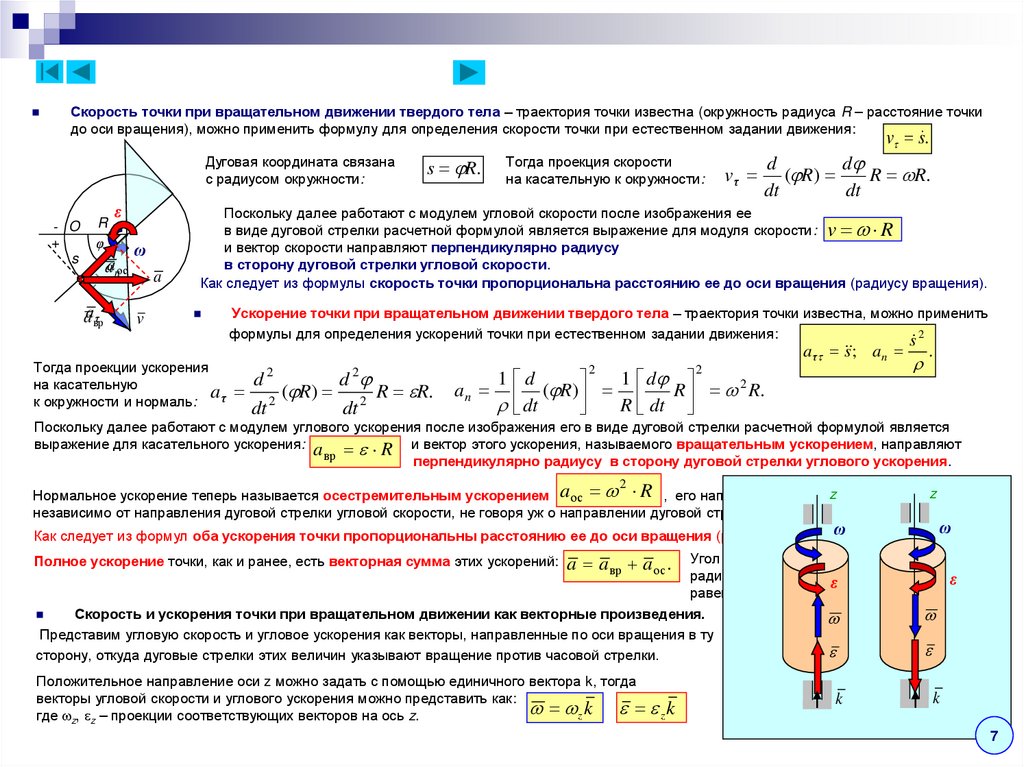
Скорость точки при вращательном движении твердого тела – траектория точки известна (окружность радиуса R – расстояние точкидо оси вращения), можно применить формулу для определения скорости точки при естественном задании движения:
v s .
Дуговая координата связана
с радиусом окружности:
- O
+
s
R
φ
ε
aanос
aaврτ
ω
a
v
s R.
Тогда проекция скорости
на касательную к окружности:
vτ
d
d
( R )
R R.
dt
dt
Поскольку далее работают с модулем угловой скорости после изображения ее
в виде дуговой стрелки расчетной формулой является выражение для модуля скорости: v R
и вектор скорости направляют перпендикулярно радиусу
в сторону дуговой стрелки угловой скорости.
Как следует из формулы скорость точки пропорциональна расстоянию ее до оси вращения (радиусу вращения).
Ускорение точки при вращательном движении твердого тела – траектория точки известна, можно применить
формулы для определения ускорений точки при естественном задании движения:
s 2
Тогда проекции ускорения
d2
d 2
на касательную
a
(
R
)
R R.
τ
2
2
к окружности и нормаль:
dt
dt
a τ s ; a n
1 d
1 d
(
R
)
R 2 R.
dt
R dt
2
an
2
.
Поскольку далее работают с модулем углового ускорения после изображения его в виде дуговой стрелки расчетной формулой является
выражение для касательного ускорения: a R и вектор этого ускорения, называемого вращательным ускорением, направляют
вр
перпендикулярно радиусу в сторону дуговой стрелки углового ускорения.
z
z
Нормальное ускорение теперь называется осестремительным ускорением aос R , его направляют по радиусу
к оси вращения
независимо от направления дуговой стрелки угловой скорости, не говоря уж о направлении дуговой стрелки углового ускорения.
2
ω
Как следует из формул оба ускорения точки пропорциональны расстоянию ее до оси вращения (радиусу вращения).
ω
Угол между направлением полного ускорения и
радиусом от величины радиуса не зависит
ε и
ε
равен:
aвр
Скорость и ускорения точки при вращательном движении как векторные произведения.
arctg arctg 2 .
Представим угловую скорость и угловое ускорения как векторы, направленные по оси вращения в ту
aос
сторону, откуда дуговые стрелки этих величин указывают вращение против часовой стрелки.
Полное ускорение точки, как и ранее, есть векторная сумма этих ускорений: a a
вр a ос .
Положительное направление оси z можно задать с помощью единичного вектора k, тогда
векторы угловой скорости и углового ускорения можно представить как:
z k z k
где z, z – проекции соответствующих векторов на ось z.
k
k
7
4.
Скорость точки при вращательном движении как векторное произведение – определяется выражением v r , котороеописывает и величину, и направление скорости.
Величина (модуль) этого
Таким образом: v R.
v 1 r sin( , r ).
векторного произведения:
ω
2 произведения:
Направление вектора рассматриваемого векторного
по определению векторного произведения – перпендикулярноRплоскости, проведенной через умножаемые вектора,
направлен в ту сторону, откуда поворот первого вектора ко второму на наименьший угол кажется происходящим
против часовой стрелки;
по правилу правой руки – при совмещении большого пальца с первым вектором, остальных – со вторым вектором,
поворот большого пальца перпендикулярно ладони указывает на направление вектора векторного произведения.
R
r
v
Таким образом, действительно векторное произведение угловой скорости и радиус-вектора полностью определяет
величину и направление скорости точки при вращательном движении в соответствии с ранее полученными результатами.
Вращательное ускорение точки как векторное произведение – определяется выражением
описывает и величину, и направление вращательного ускорения.
ε
R
r
a вр r
, которое
Таким образом:
Величина (модуль) этого векторного a
aвр R.
вр r sin( , r ).
произведения:
Направление вектора рассматриваемого векторного произведения можно установить по определению векторного
произведения или по правилу правой руки.
R
образом, действительно векторное произведение углового ускорения и радиус-вектора полностью определяет
a вр Таким
величину и направление вращательного ускорения точки в соответствии с ранее полученными результатами.
Осестремительное ускорение точки как векторное произведение – определяется
выражением a v , которое описывает и величину, и направление осестремительного
ос
ускорения.
Величина (модуль) этого
векторного произведения:
aос v sin( , v ). Таким образом: v v ( R) 2 R.
Направление вектора рассматриваемого векторного произведения можно установить по определению векторного
произведения или по правилу правой руки.
1, т.к. вектор скорости точки перпендикулярен плоскости,
Таким образом, действительно векторное произведение угловой
скорости
и вектора
скорости
точки полностью
в которой
лежит
вектор угловой
скорости.
определяет величину и направление осестремительного ускорения точки в соответствии с ранее полученными
результатами.
Это векторное произведение может быть также записано в виде: a ( r )
ос
ω
R
r
a ос
v
8
5.
Формулы Эйлера – с помощью раскрытия векторного произведения для скорости точки можно получить общие аналитическиевыражения для этой скорости через координаты рассматриваемой точки при произвольной расположении оси вращения в
пространстве:
i
v r x
x
z
ω
R
j
k
y z ( y z z y )i ( z x x z ) j ( x y y x)k
y
z
v x y z z y;
v y z x x z;
Отсюда получаются аналитические формулы для проекций скоростей точки:
r
z
x
y
x
y
v z x y y x.
v
Преобразования вращательных движений – изменение величины и направление угловых
скоростей вращающихся звеньев в различных передаточных механизмах:
Фрикционное зацепление:
v2 v1
Скорости входящих в контакт точек колес при отсутствии проскальзывания равны:
v1 v2 ;
1 R1 2 R2 . Отсюда:
1 R2
2 R1
ω2
R2
Передаточное число, характеризующее изменение скорости вращения при передаче
вращения от одного звена к другому – отношение угловой скорости ведущего колеса
R
i1 2 1 2
к угловой скорости ведомого:
2 R1
Зубчатое зацепление – число зубьев каждого из колес прямо пропорционально
радиусу колеса. Окружные скорости входящих в контакт точек поверхностей зубьев по-прежнему равны.
Полученные соотношения остаются справедливыми, в том числе и для случая внутреннего
зацепления.
Радиусы делительных окружностей связаны с шагом зубьев соотношениями: 2 R z h 2 R z h
2
2
1
1
С использованием чисел зубьев каждого из колес имеем:
Ременная и цепная передачи –. Окружные скорости
входящих в контакт с ремнем или цепью точек поверхностей
обоих колес или зубьев этих колес по-прежнему равны (ремень
или цепь не растягиваются и не сжимаются).
1
Полученные соотношения остаются справедливыми.
2
1 z 2
2 z1
v2
R2
R1
1 z 2
2 z1
R1
ω2
R2
ω1
R1
v1
ω2
ω1
ω1
R2
R1
9