












 Программирование
Программирование Электроника
ЭлектроникаПохожие презентации:




. Тема 6")





Работа с исполнительными устройствами на Arduino
1. Работа с исполнительными устройствами на Arduino
2.
Исполнительное устройство в автоматике этоустройство воздействующее на объект
управления
по
командам
устройства
управления.
#
исполнительных
устройств:
электродвигатель,
сервопривод,
нагревательный
элемент,
звуковой
излучатель…
* Не все исполнительные устройства
допускают непосредственное подключение к
Arduino.
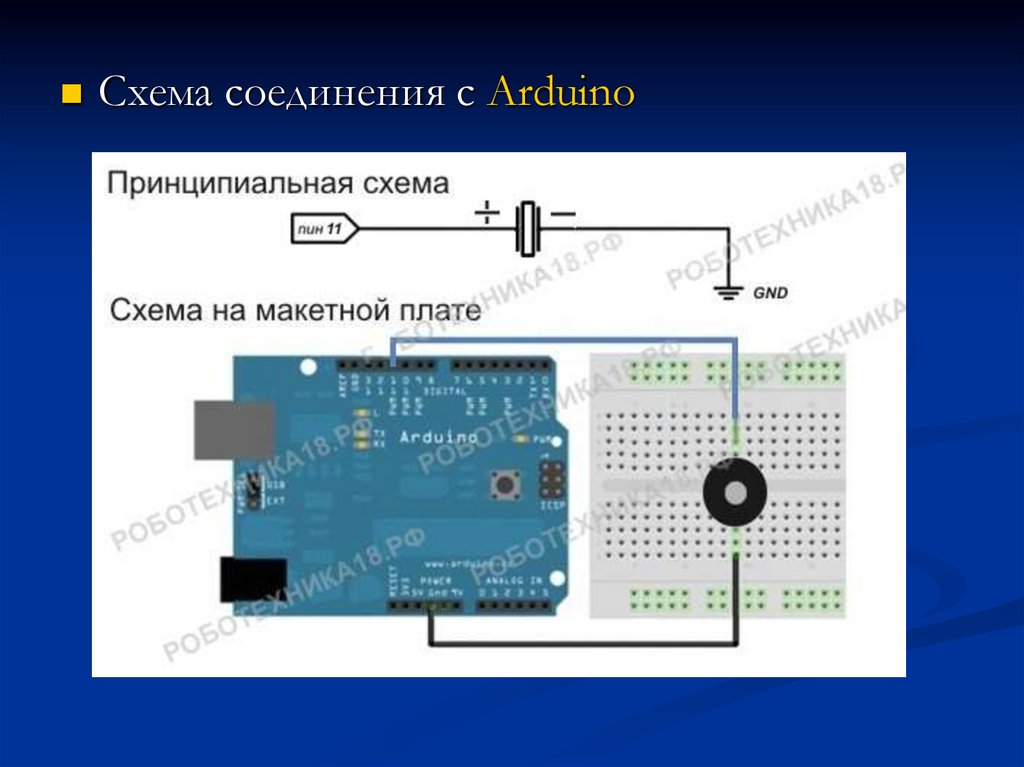
3. Работа с пьезоизлучателем
Пьезоизлучатель работает на являениипьезоэффекта – возникновении деформации
пьезокристалла при воздействии напряжения.
4.
Схема соединения с Arduino5.
Функции для программирования излучателя.tone(pin, frequency, duration) – генерирует на
выходе Arduino прямоугольный сигнал заданной
частоты. pin – номер вывода на который
происходит генерация сигнала; frequency –
частота сигнала в герцах; duration – длительность
сигнала в миллисекундах (обычно этот параметр
не используется);
noTone(pin) – останавливает генерацию сигнала
на указанном выводе.
* Для проигрывания мелодий по нотам удобно
пользоваться библиотекой pitches
6.
* Особенности генерирования звука вArduino:
Звук может воспроизводиться только на
одном выводе с одной частотой.
При попытке вывести звук на другой вывод
без прерывания прежнего (noTone) ничего не
изменится.
7.
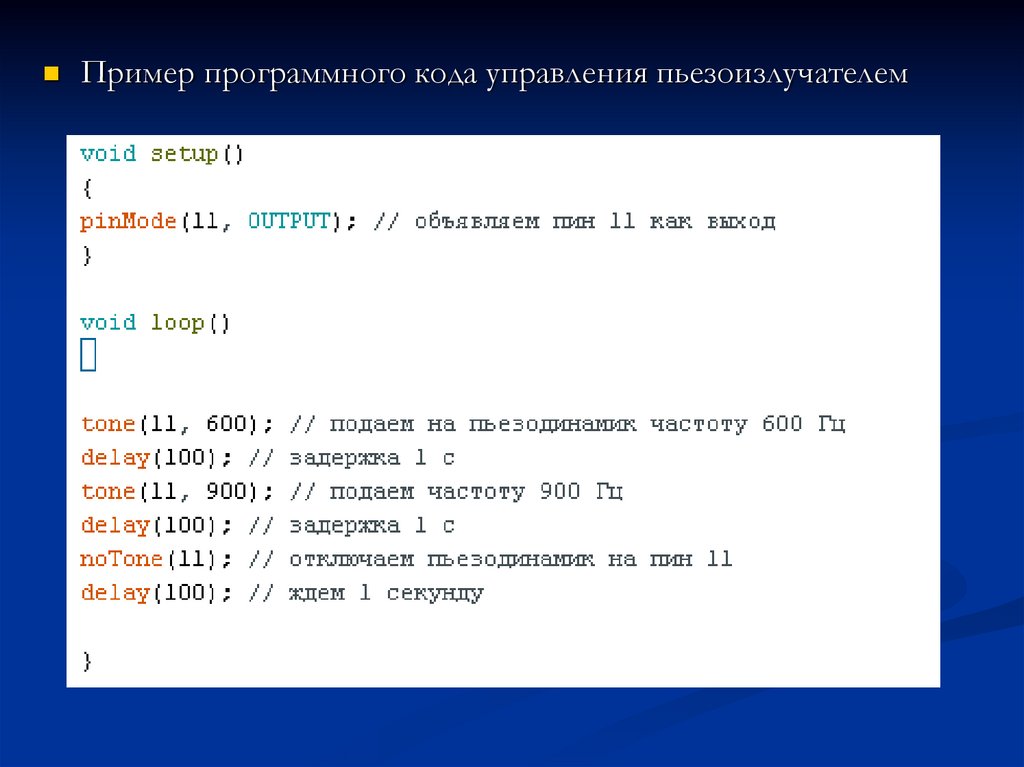
Пример программного кода управления пьезоизлучателем8. Работа с двигателями постоянного тока
Микродвигатель постоянного тока9.
Схема подключения двигателя к ArduinoМ – двигатель;
КТ3107К1 – транзистор;
1N4007 – диод;
1mkF – конденсатор;
9V – внешний источник
питания.
Подключать двигатели напрямую к
Arduino
нельзя!
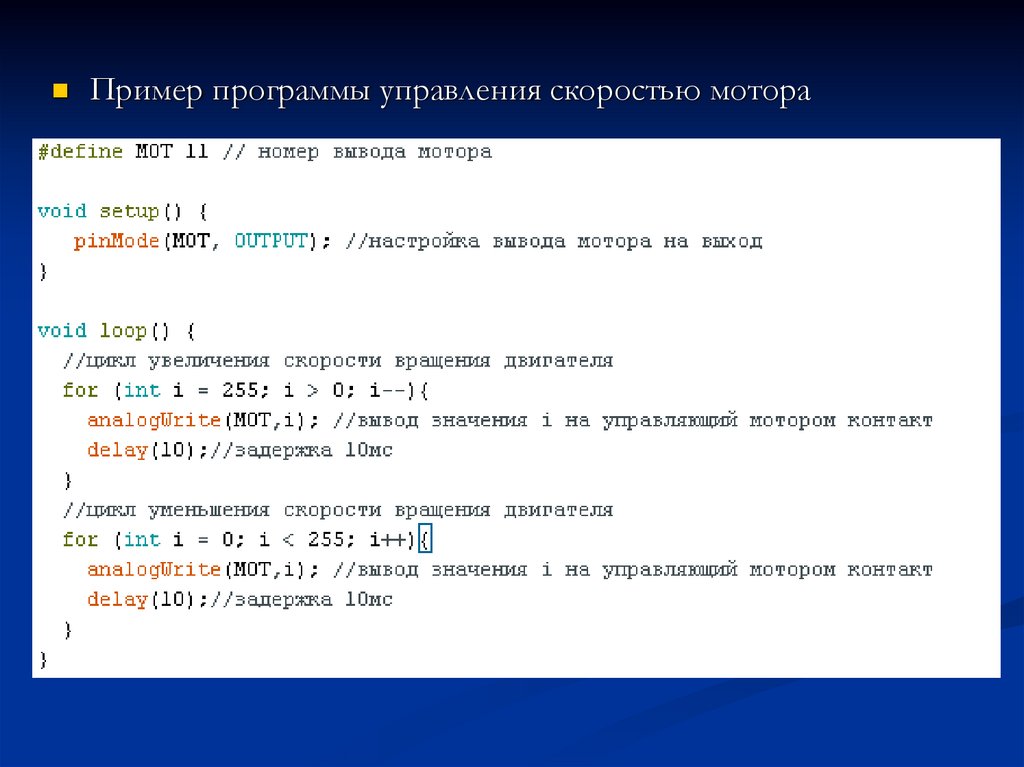
Для управления скоростью применяется
ШИМ.
10.
Пример программы управления скоростью мотора11.
* для возможности изменения направлениявращения двигателя необходимо
использовать Н-мост из транзисторов или в
виде готовой микросхемы.
12. Работа с сервоприводом
Сервопривод- электрический привод с обратной
связью
по
положению,
применяемого
в
автоматических системах для привода управляющих
элементов и рабочих органов.
Параметры сервопривода:
Скорость холостого хода: 0.12
секунд/60 градусов (4.8 В);
Крутящий момент: 1.2-1.4
кг/см (4.8 В);
Рабочее напряжение: 4.8-6 В.
Сервопривод SG90
13.
Устройство сервопривода14.
15.
Положение вала сервопривода зависит от ширины импульса науправляющем проводе.
16.
Программирование работы привода.Используется встроенная библиотека Servo.
Функции библиотеки:
servo.attach (PIN) - функция определения
вывода, к которому подключен серводвигатель.
Определяется в области void setup();
servo.write (ANGLE) - установка угла поворота
вала в градусах от 0 до 180.
В случае с серводвигателем постоянного
вращения, устанавливает скорость поворота вала.
17.
servo.read() - определение текущего углаповорота вала. Возвращает значение типа
int от 0 до 180.
servo.detach() - отключение вывода PIN от
библиотеки.
Позволяет использовать выводы для PWM
вывода.
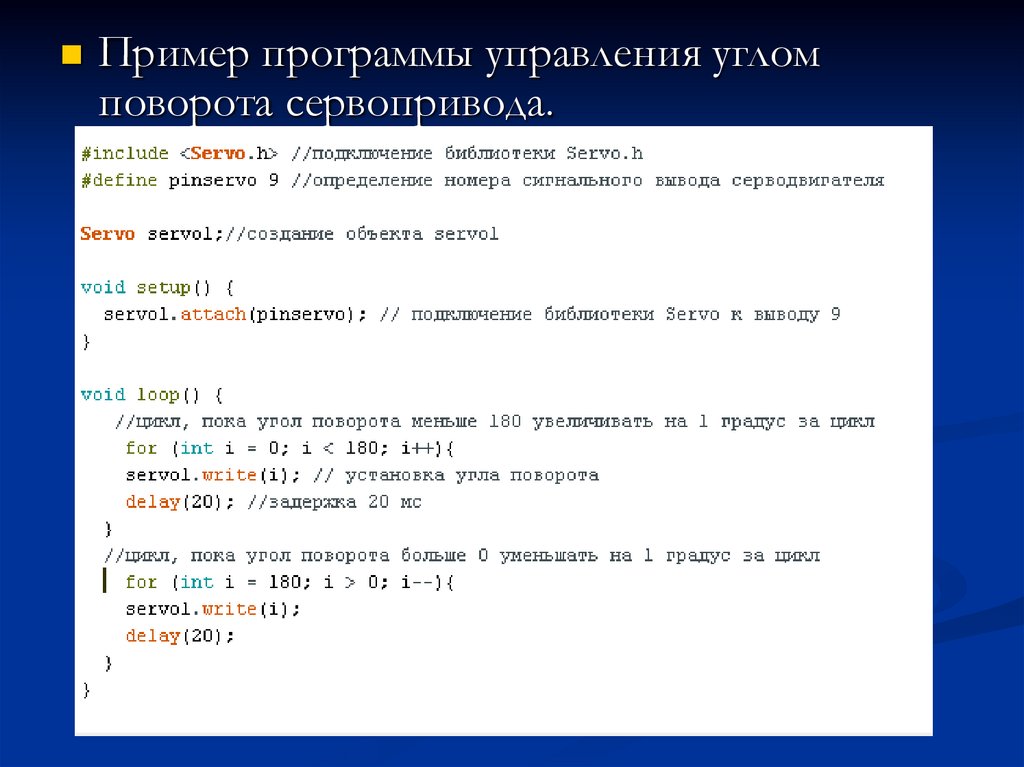
18.
Пример программы управления угломповорота сервопривода.
19. Задание 1
Создайтегенератор свип-тона (частота
плавно меняется от (20 Гц до 20 кГц)
Создайте
звуковой генератор с заданием
частоты с помощью переменного резистора
и отображением частоты колебаний на ПК.
20. Задание 2
Создайте схему управления углом поворотасервопривода от переменного резистора.