

















 Физика
Физика Электроника
ЭлектроникаПохожие презентации:










Электромеханические исполнительные устройства
1.
ЭЛЕКТРОМЕХАНИЧЕСКИЕИСПОЛНИТЕЛЬНЫЕ
УСТРОЙСТВА
Работу выполнили Крамная Алина, Мазуров Артемий, Агафонов Кирилл
2.
• Электромеханические исполнительные устройства – этопреобразователи электрической энергии в механическую.
• Устройства используются для воздействия на объекты управления с
целью их механического перемещения (поступательного или
вращательного).
3.
ТРЕБОВАНИЯ КЭЛЕКТРОДВИГАТЕЛЯМ:
• Широкий диапазон изменения частоты вращения вала двигателя;
• Возможность реверса;
• Малые габариты и масса при относительно большой мощности;
• Малая инерционность;
• Надежность в работе и долговечность;
• Простота схем управления.
4.
ДВИГАТЕЛИ ПОСТОЯННОГОТОКА
• Первый электродвигатель постоянного тока был
создан в России в 1834 г. академиком Б. С.
Якоби.
• Электродвигатели постоянного тока широко
используются в схемах автоматики, так как они
позволяют плавно регулировать частоту
вращения в большом диапазоне, т. е. получать
практически любые частоты.
5.
1. Электромагнитныеполюсы
2. Обмотки якоря
3. Щетки
Частота вращения вала
двигателя описывается
формулой:
N=
6.
ОБЩИЕ ПРАВИЛА УПРАВЛЕНИЯДВИГАТЕЛЕМ:
1. Для изменения направления вращения якоря необходимо изменить
либо направление тока якоря, либо направление магнитного потока
полюсов (тока в обмотке возбуждения).
2. Для изменения частоты вращения вала двигателя нужно менять либо
величину тока якоря, либо силу тока обмотки возбуждения.
7.
• В зависимости от системы возбуждения полюсов двигатели постоянного токаделятся на двигатели с независимым (рис.а), параллельным (рис.б),
последовательным (рис.в), смешанным (рис.г) электромагнитным
возбуждением и двигатели с магнитным возбуждением (с постоянными
магнитами) (рис.д).
8.
ОСНОВНЫЕ ЭЛЕМЕНТЫ АЭП• РМ - исполнительный орган рабочей
машины;
• МПУ - механическое передаточное
устройство;
• ЭДУ - электродвигательное
устройство;
• СПУ - силовое преобразовательное
устройство;
• УУ - управляющее устройство;
• ЗУ - задающее устройство.
9.
ЭЛЕКТРОДВИГАТЕЛИПЕРЕМЕННОГО ТОКА
• Около 90 % всех двигателей, выпускаемых промышленностью,
составляют асинхронные двигатели переменного тока.
• В следящих системах и других автоматических системах, в том числе и
метеорологических измерительных системах, наибольшее
распространение получили асинхронные двухфазные двигатели с
полым немагнитным ротором.
10.
• На статоре асинхронного двухфазногодвигателя расположены две обмотки. Магнитные
оси обмоток сдвинуты в пространстве на угол 90
º. Питание обмоток осуществляется токами
одинаковой частоты, но сдвинутыми по фазе на
p/2. Это позволяет получить в статоре
вращающееся магнитное поле с частотой
вращения равной частоте токов статорных
обмоток.
11.
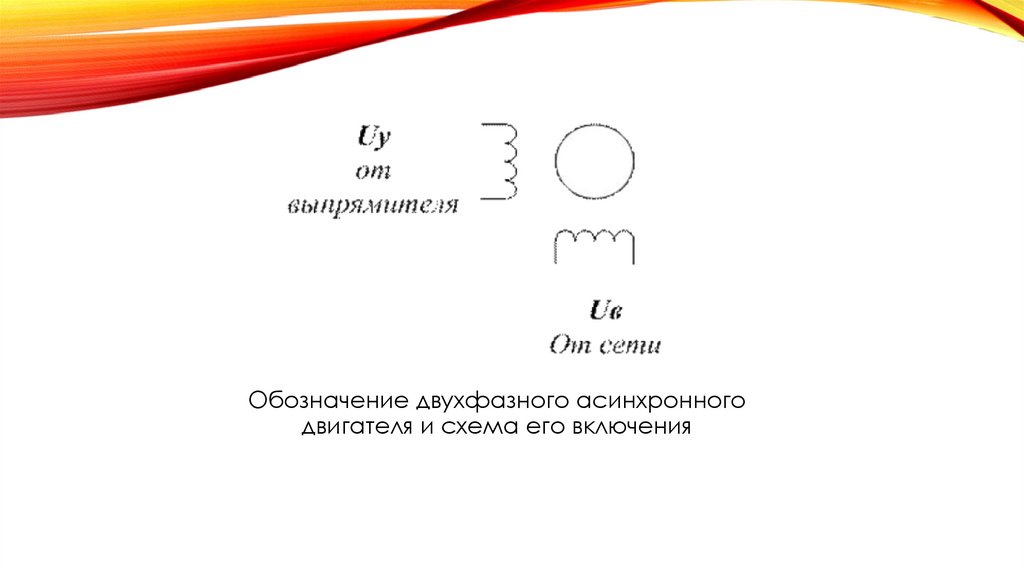
• В управляемом электроприводе одна из обмоток двигателя включена всеть, и ее называют возбуждающей. Вторая обмотка называется
управляющей. На нее подается напряжение, снимаемое, как правило,
с усилителя. При этом вращающий момент двигателя зависит от
произведения напряжений возбуждения Uв и управления Uя и синуса
угла сдвига фаз между ними:
• Мвр = k*Uв*Uя*sina
• Где k – коэффициент пропорциональности, зависит от конструктивных
особенностей двигателя и от частоты питающих токов. Чем выше частота
тока, тем больше вращающий момент.
12.
Обозначение двухфазного асинхронногодвигателя и схема его включения
13.
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ(ИМ)
• Исполнительные механизмы (ИМ), являясь составной частью системы
автоматического регулирования, предназначены для перемещения
регулирующего органа (РО) в соответствии с командой, получаемой от
регулятора. В зависимости от вида энергии, используемой в ИМ, они
подразделяются на электрические, пневматические и гидравлические.
14.
• Вентили являются наиболеераспространенными
регулирующими органами. Они
могут иметь различную форму.
Открывание и закрывание вентиля
производится перемещением
затвора в осевом направлении.
• Краны управляются вращательным
перемещением затвора на
определенный угол (в основном
90°).
15.
• Заслонки наиболее часто используют при управлении потоками массы,обладающими большой скоростью (газ, воздух). Запорный элемент
заслонки перемещается вдоль уплотняющей пластины
перпендикулярно направлению потока.
• Клапаны воздействуют на изменение потока массы с помощью дисков,
пластин, опускаемых преимущественно вертикально по отношению к
направлению потока.
16.
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫСОДЕРЖАТ ЭЛЕМЕНТЫ:
• усилитель мощности;
• электро- или пневмопривод, содержащий механическую передачу;
• регулирующий орган;
• регулирующее устройство для установки в заданное положение
регулирующего органа исполнительного механизма;
• датчик положения
17.
• Электродвигательный ИМ состоит изэлектродвигателя (3) с
электромагнитным тормозом (4), блока
(5) с конечными выключателями,
червячного редуктора (2) и выходного
вала редуктора (1), предназначенного
для сочленения с регулирующим
органом.
• Пуск электродвигателя в ту или иную
сторону вращения обеспечивается
включением контактов 1РБ или 2РБ реле
автоматического регулятора.
а — общий вид; б — электрическая
схема включения
18.
ОПИСАНИЕ И ПРИНЦИП ДЕЙСТВИЯМЕМБРАННОГО ИСПОЛНИТЕЛЬНОГО
МЕХАНИЗМА (МИМ)
• Рабочая мембранная полость образуется
мембраной (2), крышкой (3) и фланцем (15),
который размещён между крышкой (3) и
кронштейном (5). Полость уплотняется
шайбами (16) и резиновой манжетой (14),
через которую проходит шток (7), направляемый
капроновой втулкой (13) закрепляемой во
фланце (15). Шток уплотняется резиновым
уплотнительным кольцом (12). Регулирующая
гайка (9) навинчена на шток (7). Пружина (6)
верхним торцом упирается во фланец (15), а
нижним – в опору (17). С помощью
регулирующей гайки (9) можно поджать
пружину таким образом, чтобы перемещение
штока начиналось при значении входного
сигнала равного минимальному значению
перестановочного усилия в соответствии с
типом МИМ.
19.
• Мембранные ИМ из-за разнообразия ихисполнения, хорошей приспособляемости к
различным исполнительным звеньям, прочности
и надежности конструкции, экономичности
изготовления и технического обслуживания
нашли широкое применение в практике
современного производства. Как правило, их
применяют вместе с вентилями. Предельные
параметры установки исполнительных звеньев
определяются габаритами мембраны.
20.
• Гидравлические поршневые ИМ применяютвместе с рабочими цилиндрами. При этом
поршневые приводы могут располагаться
как с одной, так и с обеих сторон
цилиндра. При расположении привода с
одной стороны цилиндра поршень под
воздействием давления может
перемещаться только в одном
направлении. Возвращение поршня в
исходное положение производится, как
правило, с помощью пружины. При
двухстороннем расположении поршневого
привода на него может оказывать
воздействие давление обеих камер
цилиндра, что дает возможность
перемещения поршней в двух
направлениях.
21.
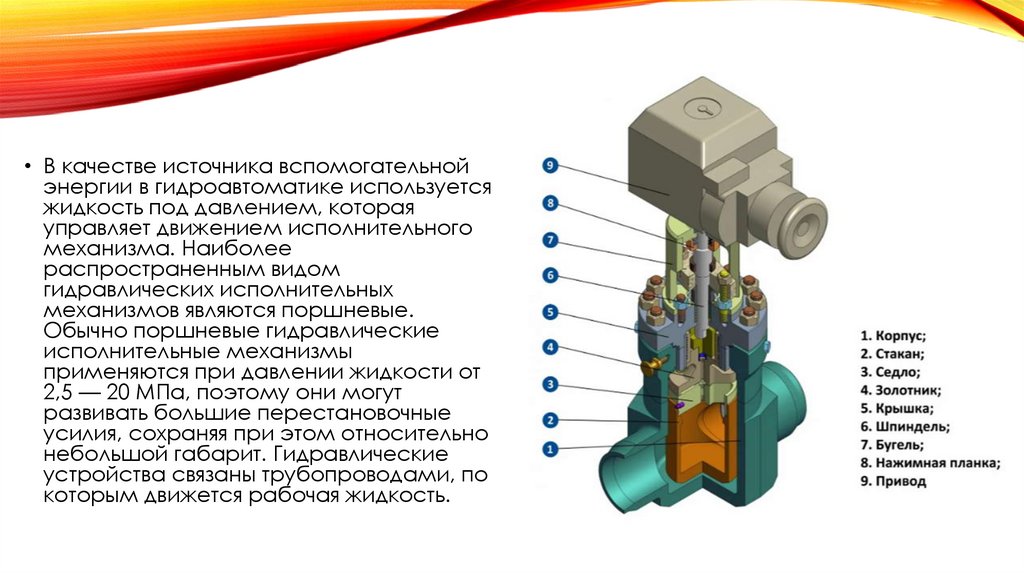
• В качестве источника вспомогательнойэнергии в гидроавтоматике используется
жидкость под давлением, которая
управляет движением исполнительного
механизма. Наиболее
распространенным видом
гидравлических исполнительных
механизмов являются поршневые.
Обычно поршневые гидравлические
исполнительные механизмы
применяются при давлении жидкости от
2,5 — 20 МПа, поэтому они могут
развивать большие перестановочные
усилия, сохраняя при этом относительно
небольшой габарит. Гидравлические
устройства связаны трубопроводами, по
которым движется рабочая жидкость.