








 Военное дело
Военное делоПохожие презентации:









. Лекция 14")
Статистическая теория обнаружения радиолокационных сигналов. Оптимальное решающее правило
1.
Военно-инженерный институтВоенный учебный центр
Кафедра «Специальные радиотехнические
системы»
Дисциплина
«ОСНОВЫ ТЕОРИИ РАДИОЛОКАЦИОННЫХ
СИСТЕМ И КОМПЛЕКСОВ»
2.
1Раскрыть содержание задачи оптимизации
обнаружения сигналов и метода ее
решения.
3.
21. Постановка задачи оптимального обнаружения
радиолокационных сигналов. Показатели качества
обнаружения.
2.
Статистические
критерии
оптимизации
обнаружения сигналов. Оптимальное решающее
правило.
4.
3 1.ПОСТАНОВКАЗАДАЧИ
ОПТИМАЛЬНОГО
ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ.
Показатели качества обнаружения
Решение задачи радиолокационного обнаружения сводится к
принятию решения о наличии или отсутствии цели. В реальных
условиях на входе приемного устройства РЛС наблюдается смесь
полезного сигнала и помех. Это приводит к случайному характеру
результатов РЛ обнаружения и указывает на статистический
характер задачи обнаружения.
В общем случае колебание на входе обнаружителя можно
записать в такой форме:
y(t) = Aх(t) + n(t),
где А - дискретный параметр, принимающий значения 0 или 1;
х(t) - полезный сигнал;
n(t) - аддитивная помеха.
5.
4 При этом задача РЛ обнаружения заключается в выясненииследующего: содержит принимаемое колебание y(t) отраженный
сигнал х(t) или нет. Для этого необходимо принять решение Â
о значении параметра А по результату анализа принятого
входного колебания y(t). Вследствие случайного характера входного
шума решение Â
не всегда соответствует истинному значению.
Возникают ошибки принятия правильного решения, которые при
обнаружении должны быть сведены к минимуму.
Таким образом, задача оптимального обнаружения состоит в
отыскании оптимального в определенном смысле решающего
правила
Аˆ Аˆopt y(t ) ,
а метод её решения сводится к совокупности операций такого
поиска.
Решение о наличии или отсутствии цели может быть принято
при двух заранее неизвестных и взаимно исключающих условиях:
6.
условие А1 – «цель есть»;условие А0 – «цели нет».
Условию А0 соответствует случай, когда на входе приемного
устройства присутствует только помеха, т.е. А = 0 и y(t) = n(t). Для
условия А1 А=1 и y(t) = х(t) + n(t).
Соответственно в этих условиях могут приниматься два вида
решений:
5
7.
6 Даннымситуациям соответствуют четыре вероятности
совмещения указанных событий, составляющих полную группу, т. е.
ˆ А Р A
ˆ А Р A
ˆ А Р A
ˆ А 1.
Р A
1 1
1 0
0 1
0 0
По теореме умножения вероятностей имеем:
ˆ А P A
ˆ A P A , i, j 0;1.
Р A
i j
i
j
j
Ввиду того, что заранее определить априорные вероятности
P(A0) и P(A1) практически сложно, за показатели качества
обнаружения принимают условные вероятности P( Aˆi / Aj ),
которые имеют следующие обозначения:
Д = P Аˆ 1 А1 – условная вероятность правильного обнаружения;
Д Р Aˆ A
– условная вероятность пропуска цели;
F = P Aˆ A – условная вероятность ложной тревоги;
F = P Aˆ A – условная вероятность правильного необнаружения.
0
0
1
1
0
0
8.
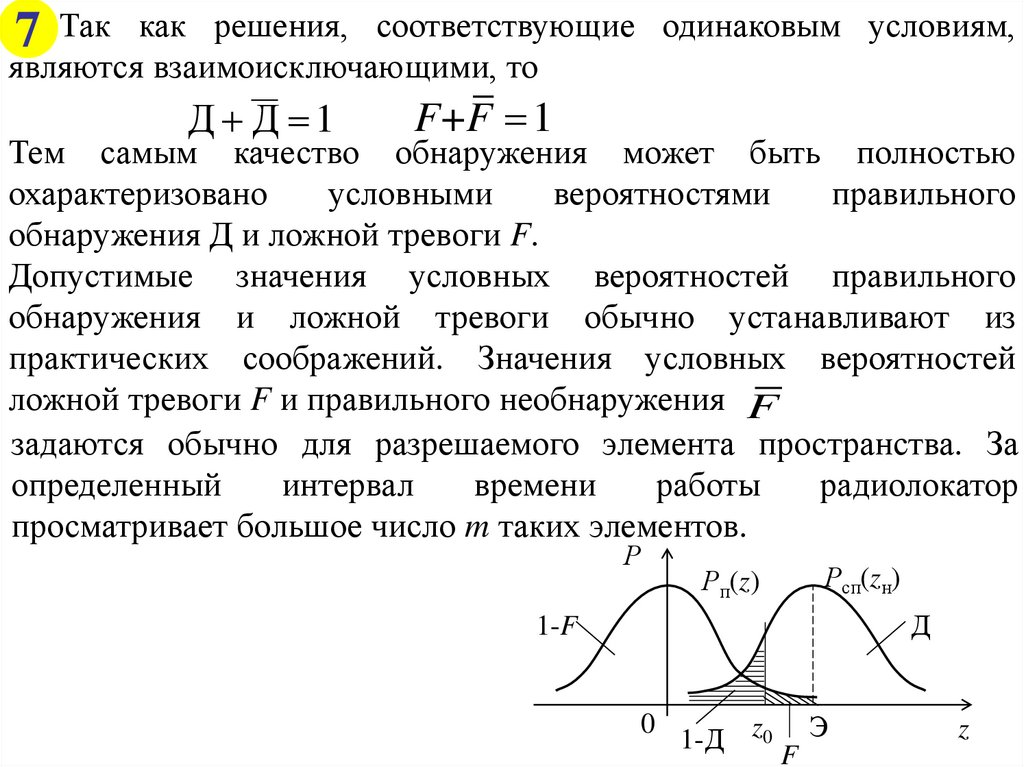
7 Так как решения, соответствующие одинаковым условиям,являются взаимоисключающими, то
Д Д 1
F+F 1
Тем самым качество обнаружения может быть полностью
охарактеризовано
условными
вероятностями
правильного
обнаружения Д и ложной тревоги F.
Допустимые значения условных вероятностей правильного
обнаружения и ложной тревоги обычно устанавливают из
практических соображений. Значения условных вероятностей
ложной тревоги F и правильного необнаружения F
задаются обычно для разрешаемого элемента пространства. За
определенный
интервал
времени
работы
радиолокатор
просматривает большое число m таких элементов.
Р
Рсп(zн)
Рп(z)
Д
1-F
0
1-Д z0
Э
F
z
9.
8 В частном случае, если условные вероятности ложной тревогидля всех элементов разрешения одинаковы, получим
Fm F 1 F ,
m
откуда при F
m
1 вероятность хотя бы одной ложной тревоги для
m совокупности из m элементов
Fm 1 1 F mF.
m
При m > 1 величина Fm > F. Поэтому в теории обнаружения
радиолокационных сигналов обычно оперируют с весьма малыми
значениями допустимой вероятности ложной тревоги для каждого
из разрешаемых элементов Fдоп = Fm доп/m.
Например, при m = 105 допустимым значениям условной
вероятности ложной тревоги Fm доп = 10-1÷10-3 соответствует
допустимое значение условной вероятности ложной тревоги в
каждом разрешаемом объеме Fдоп=10-6÷10-8.
10.
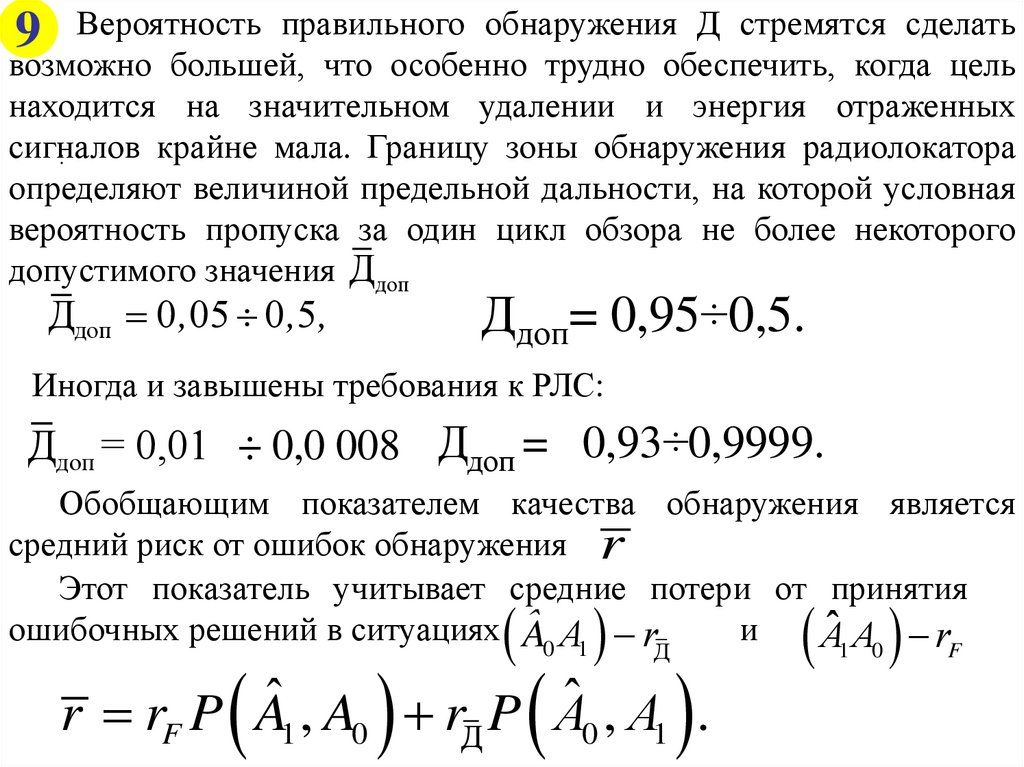
9 Вероятность правильного обнаружения Д стремятся сделатьвозможно большей, что особенно трудно обеспечить, когда цель
находится на значительном удалении и энергия отраженных
сигналов
крайне мала. Границу зоны обнаружения радиолокатора
:
определяют величиной предельной дальности, на которой условная
вероятность пропуска за один цикл обзора не более некоторого
допустимого значения Ддоп
Ддоп= 0,95÷0,5.
Ддоп 0 ,05 0 ,5,
Иногда и завышены требования к РЛС:
Ддоп = 0,01 ÷ 0,0 008 Ддоп = 0,93÷0,9999.
Обобщающим показателем качества обнаружения является
средний риск от ошибок обнаружения r
Этот показатель учитывает средние потери от принятия
ошибочных решений в ситуациях Â0 А1 r
и
Аˆ1 А0 rF
Д
r rF P Aˆ1 , A0 rД P Аˆ0 , А1 .
11.
Критерий – существенный признак покоторому производится оценка,
определение или классификация чеголибо
12.
10 2. СТАТИСТИЧЕСКИЕ КРИТЕРИИ ОПТИМИЗАЦИИ ОБНАРУЖЕНИЯСИГНАЛОВ. ОПТИМАЛЬНОЕ РЕШАЮЩЕЕ ПРАВИЛО
Учитывая априорные вероятности Р(А0), Р(А1) и введенные
показатели качества обнаружения Д, F, средний риск
r rF P A0 F rД P А1 1 Д .
Таким образом, основными показателями качества обнаружения сигналов
являются вероятности правильного и ошибочного решений, стоимости потерь
(риска) от принятия ошибочных решений и средний риск.
Наиболее общим критерием оптимальности обнаружения сигналов является
критерий минимума среднего риска (байесовский). Подбирается такой способ
(алгоритм) обработки РЛИ, при котором средний риск принимает минимальное
значение, т. е. r min .
r rF F P A0 rД 1 Д Р А1 rД Р А1 1 Д l0 F ,
– весовой критерий. Выражение представляет
Д l0 F max весовой
критерий, согласно которому оптимизация
l0
rF P A0
rД Р А1
обнаружения достигается за счет обеспечения
максимума разности
– весовой множитель.
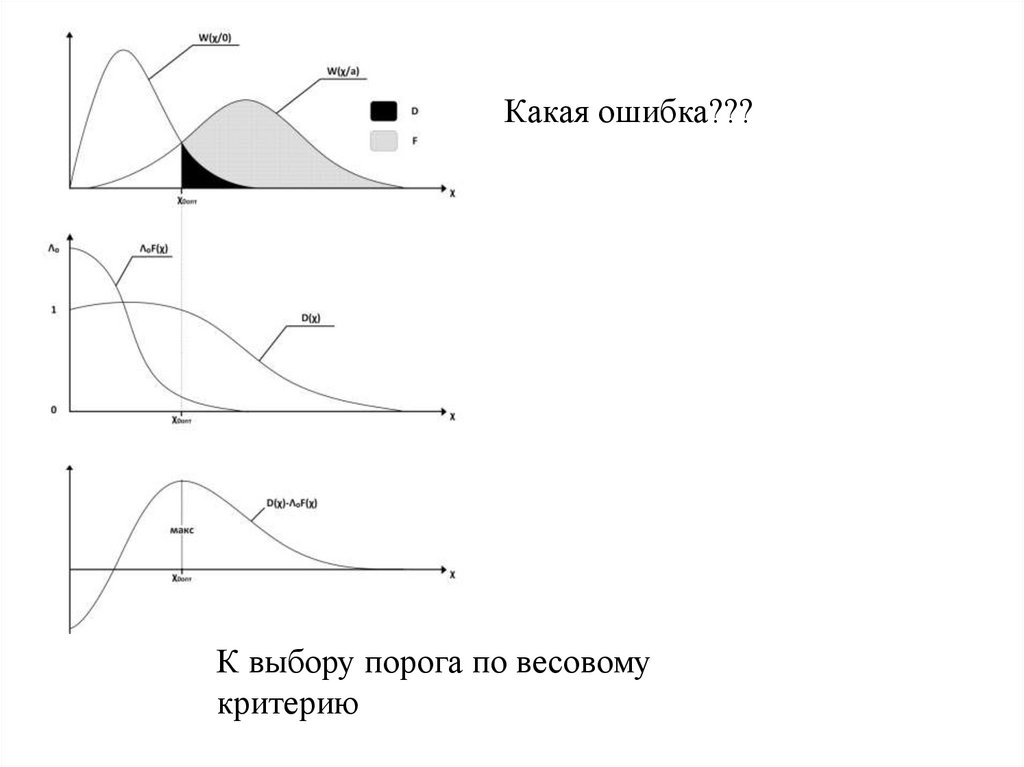
13.
Какая ошибка???К выбору порога по весовому
критерию
14.
Критерий Неймана-Пирсона является следствием весовогокритерия и вытекает из следующих логических рассуждений.
Если при одинаковом весовом множителе сравнить два
обнаружителя, один из которых является оптимальным, то,
согласно весовому критерию, справедливо неравенство:
DОПТ 0 FОПТ D 0 F
DОПТ D 00 ( FОПТ F )
Согласно
критерию
Неймана-Пирсона,
оптимальный
обнаружитель обеспечит наибольшую условную вероятность
правильного обнаружения из всех обнаружителей, у которых
условная вероятность ложной тревоги не больше, чем у
оптимального.
15.
11 Отсюда следует, что оптимальный обнаружитель имеет наибольшуювероятность правильного обнаружения среди всех обнаружителей, у которых
вероятность ложной тревоги F ≤ Fопт.
Это свойство используется в критерии Неймана–Пирсона, согласно которому
оптимальная система обнаружения должна максимизировать вероятность
правильного обнаружения Д при фиксированной вероятности ложной тревоги F,
т.е. Д = max при F = const.
На практике также используется критерий идеального наблюдателя. Под
идеальным понимается такой наблюдатель, для которого и ложная тревога, и
пропуск цели имеют одинаковую стоимость rF=rД=r0. (Применяется в теории связи
При r0=1 r Д Р A1 F P A0 .
при передаче цифровой информации)
Для решения задачи оптимизации обнаружения необходимо определить
взаимосвязь показателей качества Д и F с характеристиками принимаемого
ˆ[ y(t )].
сигнала y(t) и перейти от наблюдаемых значений y(t) к решению A
Для этого следует разбить множество возможных реализаций y(t) на две области:
Y1 и Y0 .
Разбиение области Y определения величины
y на Y1 и Y0 осуществим введением
некоторого порогового значения y0
Y0
Y1
y0
y
16.
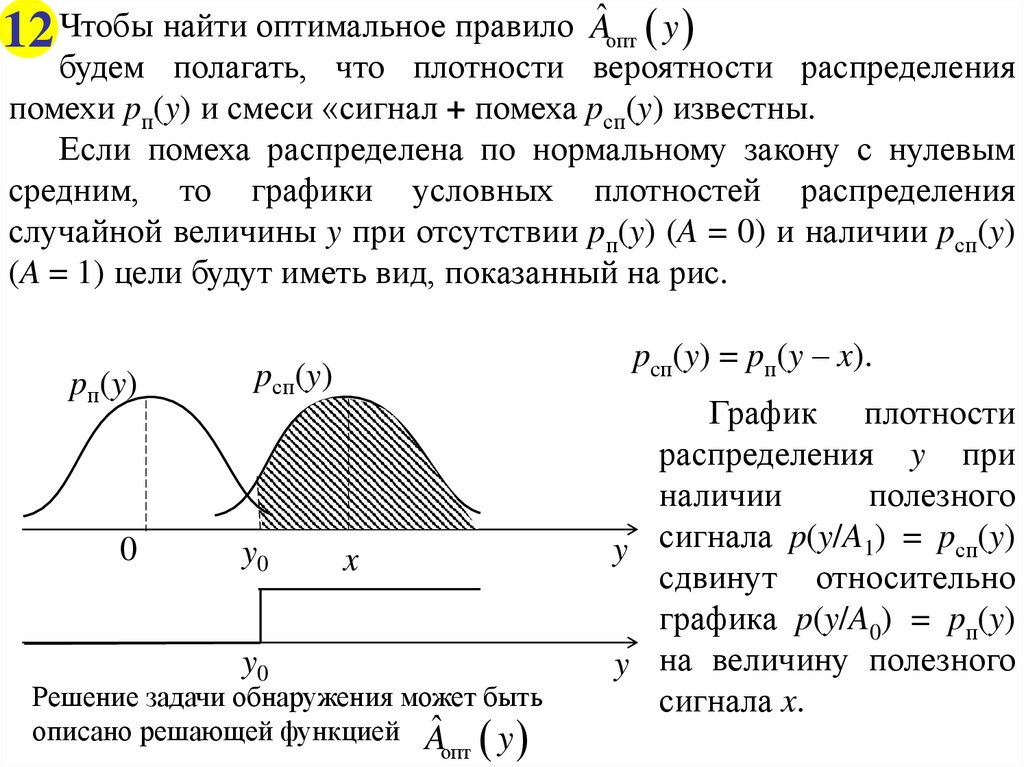
12 Чтобы найти оптимальное правило Âопт yбудем полагать, что плотности вероятности распределения
помехи pп(y) и смеси «сигнал + помеха pсп(y) известны.
Если помеха распределена по нормальному закону с нулевым
средним, то графики условных плотностей распределения
случайной величины y при отсутствии pп(y) (A = 0) и наличии pсп(y)
(A = 1) цели будут иметь вид, показанный на рис.
pп(y)
0
pcп(y) = pп(y – x).
pсп(y)
y0
x
y0
Решение задачи обнаружения может быть
описано решающей функцией Â
y
опт
График плотности
распределения y при
наличии
полезного
y сигнала p(y/A1) = pсп(y)
сдвинут относительно
графика p(y/A0) = pп(y)
y на величину полезного
сигнала x.
17.
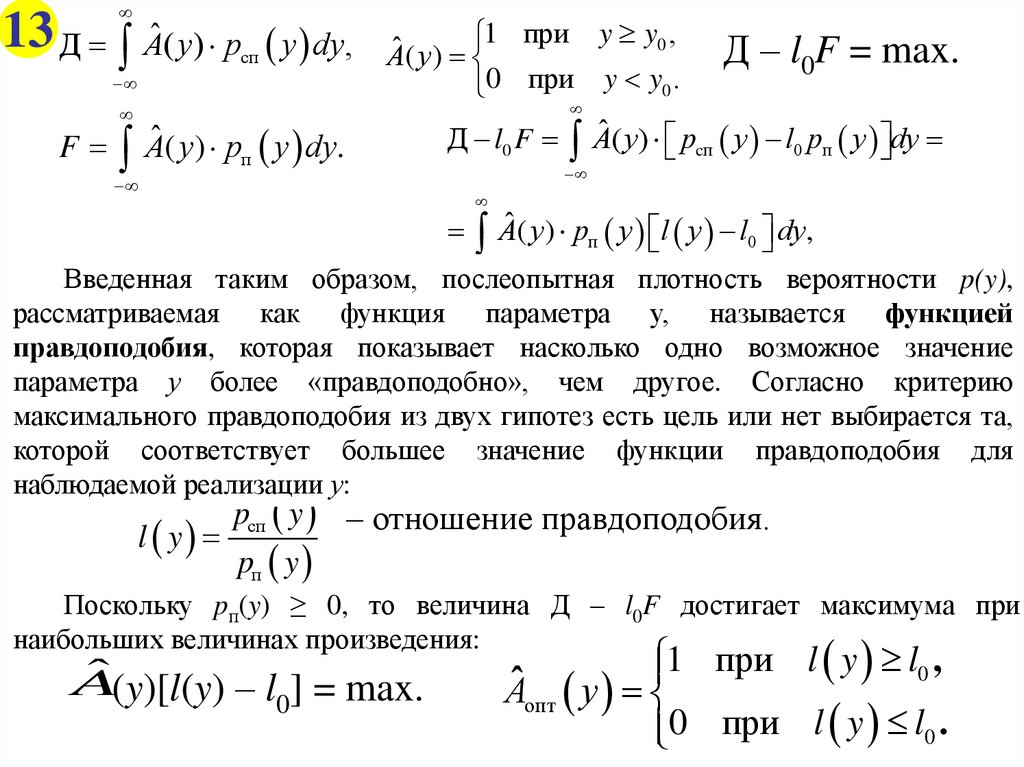
13 Д Аˆ ( y) p y dy, Аˆ ( y) 1 при y y ,сп
F Аˆ ( y ) pп y dy.
0
0 при
y y0 .
Д – l0F = max.
Д l0 F Аˆ ( y ) pcп y l0 pп y dy
Аˆ ( y ) pп y l y l0 dy,
Введенная таким образом, послеопытная плотность вероятности p(y),
рассматриваемая как функция параметра у, называется функцией
правдоподобия, которая показывает насколько одно возможное значение
параметра у более «правдоподобно», чем другое. Согласно критерию
максимального правдоподобия из двух гипотез есть цель или нет выбирается та,
которой соответствует большее значение функции правдоподобия для
наблюдаемой реализации у:
pсп y – отношение правдоподобия.
l y
pп y
Поскольку pп(y) ≥ 0, то величина Д – l0F достигает максимума при
наибольших величинах произведения:
Â(y)[l(y) – l0] = max.
1 при l y l0 ,
Аˆ опт y
0 при l y l0 .
18.
14Последнее соотношение характеризует критерий
отношения правдоподобия.
Таким образом, решение о наличии цели принимается в
том случае, когда отношение правдоподобия l(y) ≥ l0, в
противном случае принимается решение об отсутствии
цели.
19.
1520.
Отработать материал лекции в соответствии срекомендованной литературой:
Л 1/о с. 66-74
ООПИ ч 1