




 Военное дело
Военное делоПохожие презентации:


")





 РЛС 35Н6 (бл.354ПК01). Система обработки сигналов РЛС 35Н6. Тема 5-3-групповое")
")
Расчет системных параметров наземной когерентно - импульсной РЛС
1.
Министерство науки и высшего образования РФФедеральное государственное бюджетное образовательное учреждение
высшего образования
«Рязанский государственный радиотехнический университет
имени В.Ф. Уткина»
Кафедра РТС
Курсовой проект
на тему:
«Расчет системных параметров наземной когерентно-импульсной РЛС»
Выполнил: ст. гр. 9010
Сафонов М.Н.
Проверила: доцент
Сафонова А.В.
Рязань, 2023 г.
2.
Министерство науки и высшего образования РФФедеральное государственное бюджетное образовательное учреждение
высшего образования
Рязанский государственный радиотехнический университет
имени В.Ф. Уткина
Кафедра радиотехнических систем
ЗАДАНИЕ
на курсовое проектирование
Студенту Сафонову Максиму Николаевичу группа
РЛС
9010
1. Тема проекта: Расчет системных параметров наземной когерентно-импульсной
2. Срок сдачи законченного проекта:
31 марта 2023 г.
3. Исходные данные к проекту: разрешение по дальности R = 150 м; максимальная
дальность обнаружения Rmax = 150 км; ширина зоны обзора в азимутальной и
угломестной плоскостях: = 360 , = 30 ; рабочая частота f0 = 10 ГГц; ЭПР цели
S0 = 2 м2; вероятности правильного обнаружения и ложной тревоги на зону обзора:
D = 0.85 , Fобз = 10 -6; темп обновления информации: = 6 мин-1; разрешающие
способности по азимуту и углу места: = 2 , = 6 ; коэффициент шума СВЧ прибора
kш = 2..4 ; потери на обработку сигнала, L = 3; относительная ширина спектра помех от
местных предметов и гидрометеоров, fT = 0.05 ; отношение помеха-шум = 70 дБ;
высота подъема антенны Ha = 12 м.
4. Содержание пояснительной записки (с расшифровкой задания по каждой части):
1) Введение.
2) Анализ технического задания.
3) Расчет системных параметров РЛС.
3.1) Выбор режима работы РЛС: расчет частоты повторения импульсов для
однозначного измерения дальности.
3.2) Расчет тактических и технических параметров РЛС в отсутствие помех:
длительность импульса; минимальная дальность обнаружения; максимальная
однозначно измеряемая скорость и разрешающая способность по скорости;
мощность передатчика – импульсная и средняя, дальность прямой видимости.
3.3) Выбор порядка режекторного фильтра ЧПК; расчет коэффициента
подавления помехи, АЧХ фильтра, ширины полосы режекции.
3.4) Выбор разрядности АЦП и его тактовой частоты; оценка требуемого
объема ОЗУ.
4) Разработка структурной схемы РЛС и описание ее работы.
5) Заключение.
6) Библиографический список.
5. Перечень графического материала:
- структурная схема проектируемой системы – 1...2 л.
Дата выдачи задания « 03 » февраля 2023 г.
Руководитель проекта __________
Задание принял к исполнению «____» _________ 2023 г. Подпись студента ___________
2
3.
Содержание1 Введение…………………………………………………………………………4
2 Анализ технического задания……………………………………….…………5
3 Расчет системных параметров РЛС………………………………….………...7
3.1 Выбор режима работы РЛС………………………………….………..7
3.2 Расчет тактических и технических параметров РЛС………….……..8
3.3 Выбор порядка режекторного фильтра ЧПК……….………………11
3.4 Выбор разрядности АЦП и его тактовой частоты…………….……13
4 Разработка структурной схемы БРЛС и описание её работы……….……...15
5 Заключение……………………………………………………………….……17
6 Библиографический список…………………………………………………..18
Структурная схема проектируемой системы…………………………………..19
3
4.
1 ВведениеРадиолокационные комплексы (РЛК) обнаружения, перехвата и
сопровождения,
движением,
используемые
средствах
радиолокационного
в
системах
противовоздушной
обнаружения,
являются
управления
воздушным
обороны
и
дальнего
основным
техническим
средством получения достоверной информации о воздушной обстановке.
Качество функционирования таких радиотехнических систем (РТС) во
многом определяется их тактико-техническими характеристиками. Поэтому к
современным РЛК предъявляются высокие требования, наиболее важными из
которых являются помехозащищенность; высокая вероятность правильного
обнаружения воздушных объектов (ВО) при фиксированном уровне ложных
срабатываний; точность измерения скорости ВО и дальности до них.
Актуальность
проектирования
РЛК
также
связана
со
следующими
тенденциями в авиации и в авиастроении:
-
уменьшением
радиоэлектронной
заметности
управляемых
и
беспилотных летательных аппаратов военного и гражданского назначения,
которое достигается применением малоотражающих форм и современных
композитных покрытий;
- повышением тяговых свойств авиационных двигателей и, как
следствие, маневренности ВО;
- ростом числа полетов ВО малой авиации;
- совершенствованием средств радиоэлектронного подавления.
Обнаружение целей на фоне интенсивных мешающих отражений от
гидрометеоров, подстилающей поверхности и облаков искусственных
пассивных помех (дипольных отражателей) возможно при использовании
средств защиты от пассивных помех. В когерентных импульсных РЛК
такими средствами являются режекторные фильтры (РФ): череспериодной
компенсации (ЧПК) и с оптимизированными весовыми коэффициентами
(ОВК).
4
5.
2 Анализ технического заданияВ соответствии с техническим заданием в данной работе необходимо
провести расчёт системных параметров наземной когерентно-импульсной
РЛС обнаружения. Рабочая частота РЛС f 0=10 ГГц означает, что станция
работает в L-диапазоне. В задании указана максимальная дальность
обнаружения Rmax =150 км и ЭПР S0 =2 м 2, поэтому в качестве цели с заданной
ЭПР может выступать зарубежный боевой беспилотный самолет. Скорость
беспилотного летательного аппарата (ЛА) до 100 м/с. Также в соответствии с
ТЗ применяется круговой обзор с параметрами ∆ α=360° и ∆ β=30° , при этом
высота подъема антенны H a =12 м .
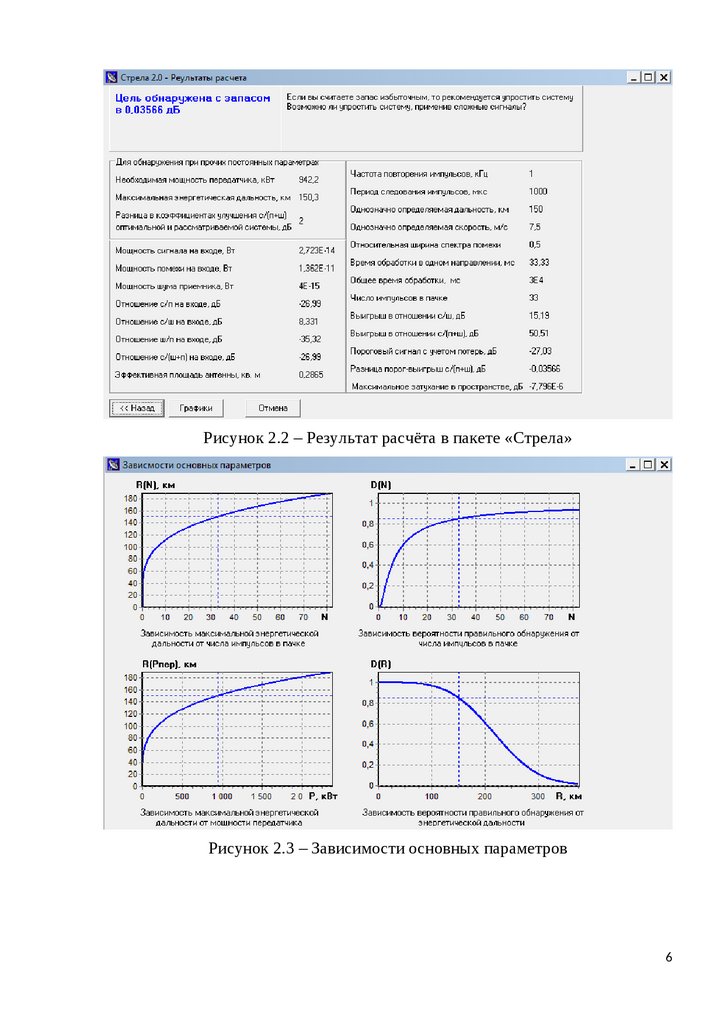
Для анализа также возможно использовать программный пакет
«Стрела».
Рисунок 2.1 – Окна для ввода параметров станции
Результат расчёта представлен на рисунке 2.2.
5
6.
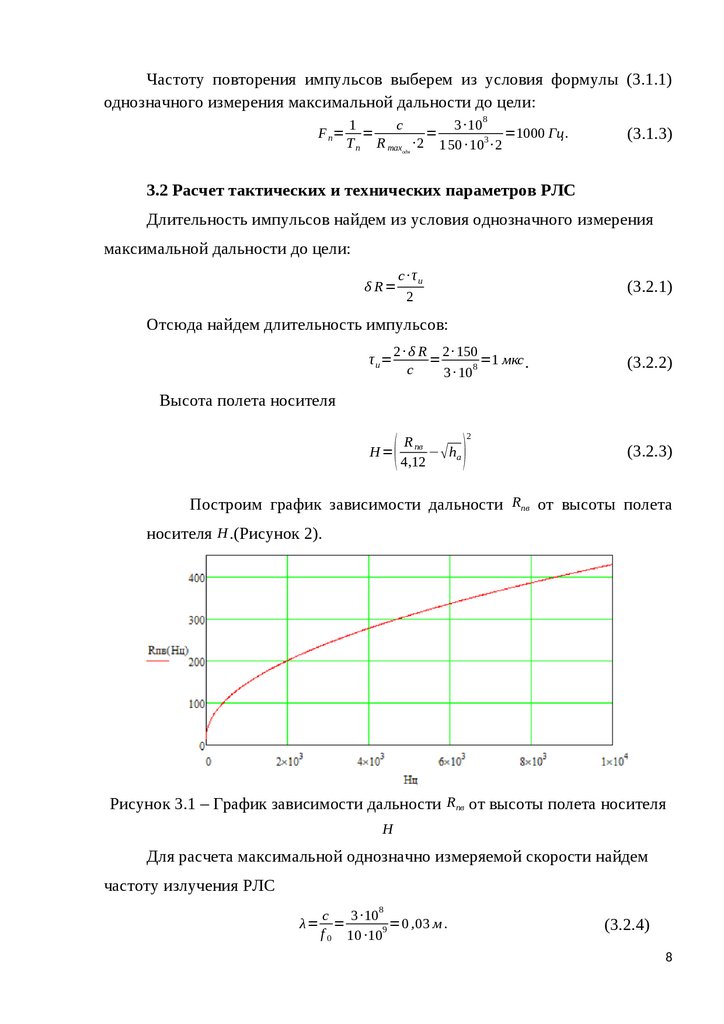
Рисунок 2.2 – Результат расчёта в пакете «Стрела»Рисунок 2.3 – Зависимости основных параметров
6
7.
3 Расчет системных параметров РЛС3.1 Выбор режима работы РЛС
После обнаружения от РЛК требуется измерение дальности до цели и
ее радиальной скорости. Важно, чтобы измерения были однозначными, т.е.
значения, определенные с помощью РЛК, совпадали с истинными. В
импульсных РЛК с когерентной пачкой максимальные значения однозначно
определяемых дальности Rmax и радиальной скорости V r определяются
одн
max одн
соответственно выражениями:
Rmax =
c ∙T п
,
2
(3.1.1)
Vr
λ
,
4∙Tп
(3.1.2)
одн
max одн
=
где c – скорость распространения электромагнитных волн, T п – период
c
повторения импульсов пачки, λ= f – частота излучения РЛК.
0
Выбор режима работы РЛС обнаружения обычно осуществляется
исходя из требования однозначного измерения дальности. Как следует из
формулы (3.1.1), для таких РЛС период следования импульсов пачки
выбирается большим, поэтому рассчитанная в соответствии с (3.1.2)
однозначно измеряемая скорость будет малой. Для режима работы РЛС с
низкой частотой повторения импульсов и включенными средствами защиты
от пассивных (коррелированных) помех характерно наличие эффекта
«слепых» скоростей, когда изменение фазы отраженного сигнала от целей,
движущихся с радиальными скоростями ± 2 k V r , k =0 , ±1 , ±2 , … , за период T п
max одн
составляет ± 2 kπ радиан. Цель с таким доплеровским набегом фазы за период
следования импульсов определяется РЛС как неподвижная, т.е. имеющая с
нулевой частотой Доплера F д =0 при фактической частоте Доплера F д=
изм
2V r
.
λ
Как следствие, спектр отраженного сигнала попадает в область низких частот
и ослабляется в режекторном фильтре вместе с помехой. Для исключения
эффекта «слепых» скоростей необходимо вводить вобуляцию (изменение)
периода повторения T п.
7
8.
Частоту повторения импульсов выберем из условия формулы (3.1.1)однозначного измерения максимальной дальности до цели:
F п=
8
1
c
3 ∙10
=
=
=1000 Гц .
T п Rmax ∙2 150 ∙ 103 ∙ 2
(3.1.3)
одн
3.2 Расчет тактических и технических параметров РЛС
Длительность импульсов найдем из условия однозначного измерения
максимальной дальности до цели:
δ R=
c ∙ τи
2
(3.2.1)
Отсюда найдем длительность импульсов:
τи=
2 ∙ δ R 2∙ 150
=
=1 мкс .
8
c
3 ∙ 10
(3.2.2)
Н=
(
(3.2.3)
Высота полета носителя
)
2
R пв
−√ ha
4,12
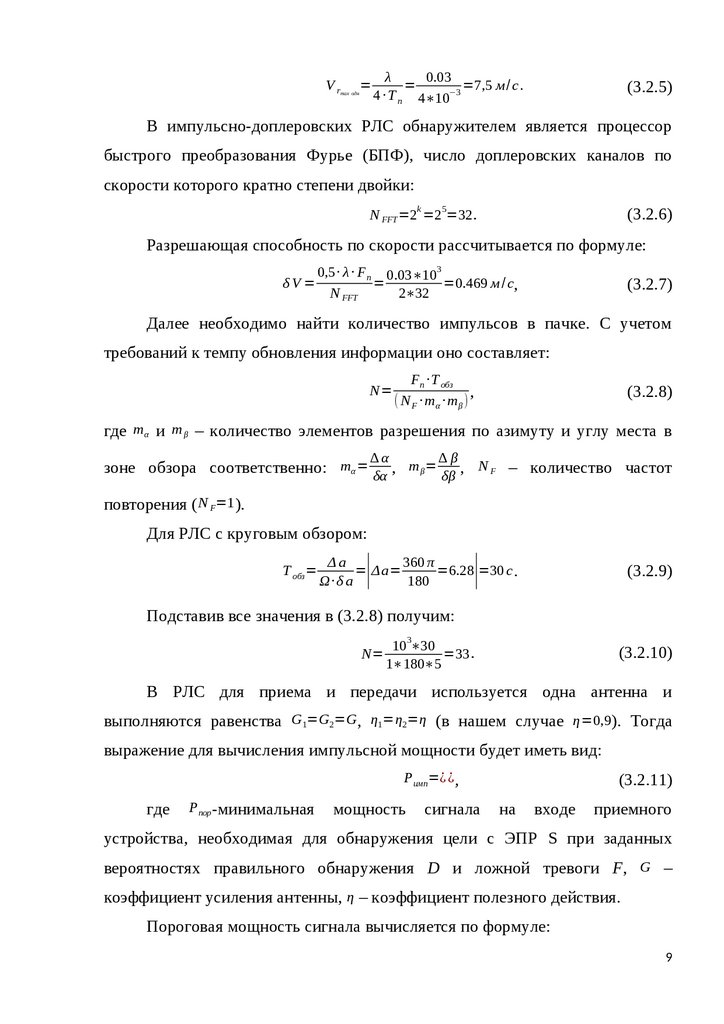
Построим график зависимости дальности Rпв от высоты полета
носителя Н .(Рисунок 2).
Рисунок 3.1 – График зависимости дальности Rпв от высоты полета носителя
Н
Для расчета максимальной однозначно измеряемой скорости найдем
частоту излучения РЛС
λ=
8
c
3 ∙10
=
=0 ,03 м .
f 0 10 ∙109
(3.2.4)
8
9.
Vr
max одн
=
λ
0.03
=
=7,5 м /с .
4 ∙ T п 4∗10−3
(3.2.5)
В импульсно-доплеровских РЛС обнаружителем является процессор
быстрого преобразования Фурье (БПФ), число доплеровских каналов по
скорости которого кратно степени двойки:
N FFT =2 =2 =32.
k
(3.2.6)
5
Разрешающая способность по скорости рассчитывается по формуле:
0,5∙ λ ∙ Fп 0.03∗103
δV=
=
=0.469 м /c,
N FFT
2∗32
(3.2.7)
Далее необходимо найти количество импульсов в пачке. С учетом
требований к темпу обновления информации оно составляет:
N=
Fп ∙T обз
,
(N F ∙ m α ∙ mβ )
(3.2.8)
где mα и m β – количество элементов разрешения по азимуту и углу места в
∆α
∆β
зоне обзора соответственно: mα = δα , m β= δβ , N F – количество частот
повторения ( N F=1).
Для РЛС с круговым обзором:
T обз =
|
|
(3.2.9)
10 ∗30
=33 .
1∗180∗5
(3.2.10)
Δa
360 π
= Δ a=
=6.28 =30 с .
Ω∙ δ а
180
Подставив все значения в (3.2.8) получим:
N=
3
В РЛС для приема и передачи используется одна антенна и
выполняются равенства G1=G2=G , η1=η2=η (в нашем случае η=0,9). Тогда
выражение для вычисления импульсной мощности будет иметь вид:
Pимп=¿ ¿ ,
где
Pпор -минимальная
мощность
сигнала
(3.2.11)
на
входе
приемного
устройства, необходимая для обнаружения цели с ЭПР S при заданных
вероятностях правильного обнаружения D и ложной тревоги F, G –
коэффициент усиления антенны, η – коэффициент полезного действия.
Пороговая мощность сигнала вычисляется по формуле:
9
10.
Pпор =q пор ∙ L∙ Pш ,(3.2.12)
k ∙ k ∙T 0
Pш = ш
,
τи
(3.2.13)
где q пор – пороговое отношение сигнал-шум, L – потери на обработку (по ТЗ
равно 3), Pш – мощность внутренних шумов приемника, k ш – коэффициент
шума СВЧ прибора (по ТЗ в пределах от 2 до 4; возьмем для РЛС k ш=3 ),
k–
постоянная Больцмана, T 0 – температура окружающей среды в кельвинах
(примерно 300 К (27 ° ∁ )).[4]
Pш =k ш ∙ k ∙
T 0 3 ∙ 1,38 ∙10−23 ∙ 300
−14
=
=1,242∙ 10 Вт .
−6
τи
1 ∙10
(3.2.14)
Пороговое отношение сигнал-шум для когерентной пачки из N 0
импульсов со случайной начальной фазой и флуктуирующей амплитудой
ln ( F )
−1)
ln ( D )
.
q пор =
N
(
(3.2.15)
Для РЛС с однозначным измерением скорости
F=
F обз
,
N FFT ∙ mα ∙ mβ
(3.2.16)
где D и F обз – вероятности правильного обнаружения и ложной тревоги в зоне
обзора (по ТЗ D=0 ,8 5 и F обз=10−6).
−6
F обз
10
−11
F=
=
=3 . 472 ∙10 .
N FFT ∙ mα ∙ m β 32∙ 1 8 0∙ 5
ln ( F )
ln ( 3 .472∙ 10
(
−1) (
ln ( D )
ln ( 0 , 8 5 )
q пор =
=
N
33
−11
)
−1)
=4 , 4 6.
Pпор =q пор ∙ L∙ Pш =4 , 4 6 ∙3 ∙ 1,242∙ 10
−14
=1, 662 ∙10
−13
Вт (3.2.17)
Коэффициент усиления антенны РЛС может быть рассчитан по
формуле:
G=
2
4∙π
4 ∙ π ∙57,3
=
=343 7 , 75
∆ φα ∙ ∆ φ β
2∙ 6
(3.2.18)
Теперь известны значения всех составляющих для вычисления
импульсной мощности передатчика:
Pимп=¿ ¿ .
(3.2.19)
10
11.
Pимп Pимп 9689 ∙ 103Pср =
=
=
=9,689 к Вт
Q
Tп
10 00
.
τи
(3.2.20)
11
12.
3.3 Выбор порядка режекторного фильтра ЧПКПовысить вероятность обнаружения целей на фоне мешающих
отражений от естественных (подстилающая поверхность, местные предметы,
гидрометеоры, стаи птиц) и искусственных (облака диполей) объектов
позволяет применение режекторных фильтров.
Порядок РФ следует выбрать таким образом, чтобы коэффициент
подавления пассивной помехи стремился к величине отношения помеха-шум
, и в то же время дальнейшее увеличение порядка РФ не приводило к
сколько-либо значимому увеличению коэффициента подавления помехи
(см. рисунок). В приведенном примере целесообразно выбрать n = 4,
поскольку при таком порядке фильтра пассивная помеха подавляется до
уровня, близкого к мощности внутреннего шума приемника РЛК. В то же
время дальнейшее увеличение n практически не улучшает kп, однако
приводит к увеличению доли отсчетов, теряемых на переходный процесс в
РФ.
Рисунок 3 – Выбор порядка фильтра
Используя методические указания к курсовому проектированию [3]
выполняем расчет коэффициента подавления помехи, АЧХ фильтра и
ширины полосы режекции в среде MathCAD. Расчет коэффициента
производился следующим образом:
12
13.
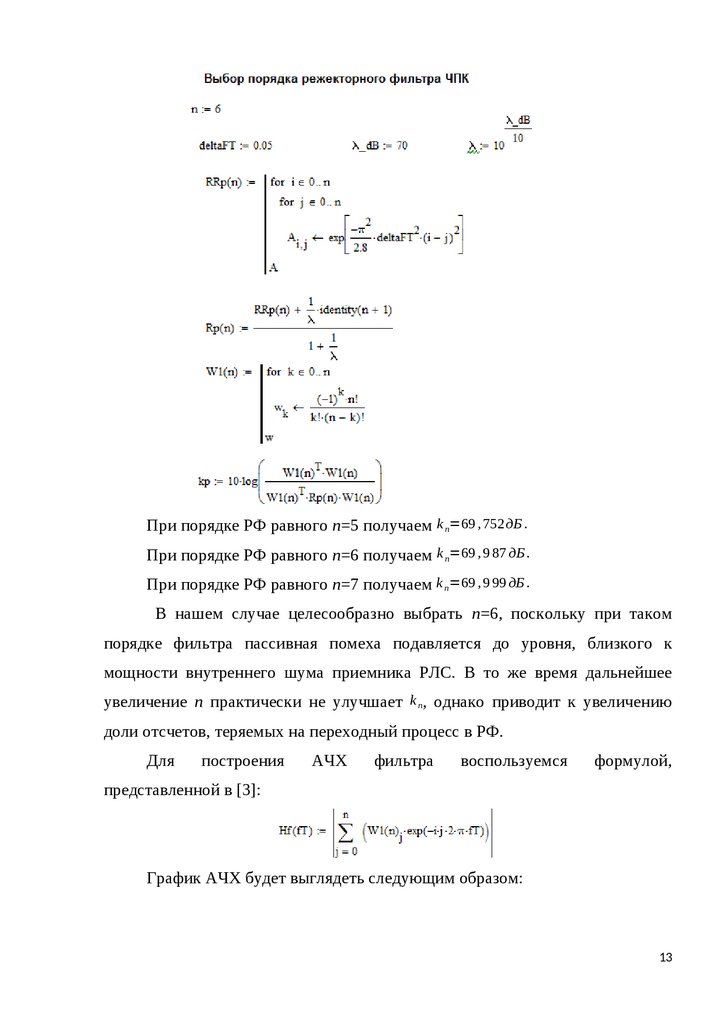
При порядке РФ равного n=5 получаем k п=69 , 752дБ .При порядке РФ равного n=6 получаем k п=69 , 9 87 дБ .
При порядке РФ равного n=7 получаем k п=69 , 9 99 дБ .
В нашем случае целесообразно выбрать n=6, поскольку при таком
порядке фильтра пассивная помеха подавляется до уровня, близкого к
мощности внутреннего шума приемника РЛС. В то же время дальнейшее
увеличение n практически не улучшает k п, однако приводит к увеличению
доли отсчетов, теряемых на переходный процесс в РФ.
Для
построения
АЧХ
фильтра
воспользуемся
формулой,
представленной в [3]:
График АЧХ будет выглядеть следующим образом:
13
14.
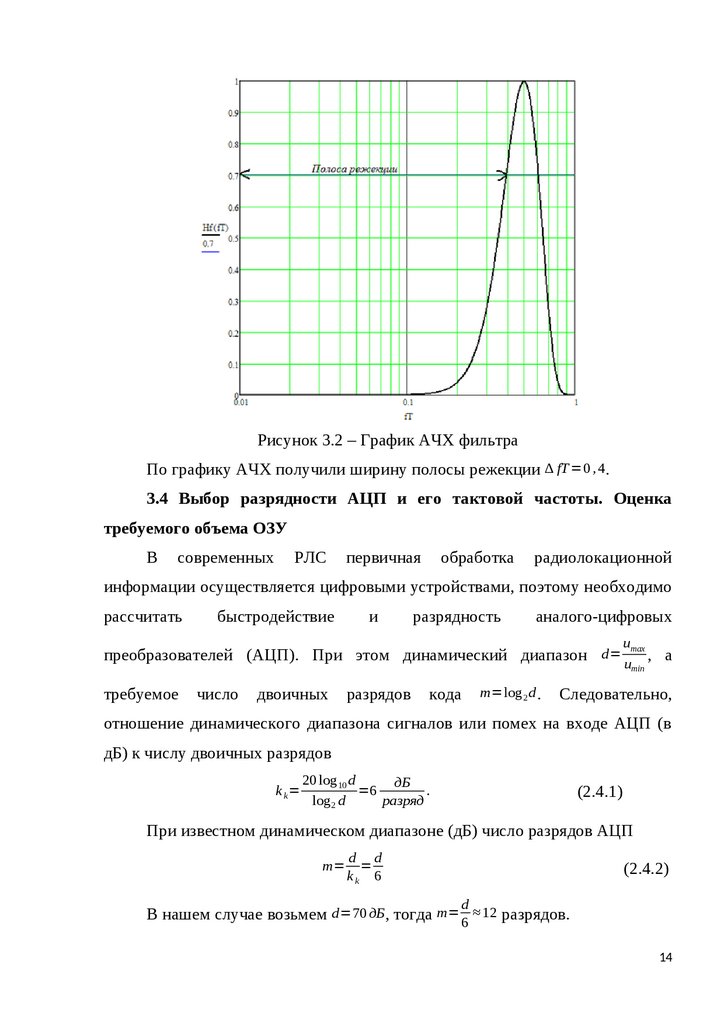
Рисунок 3.2 – График АЧХ фильтраПо графику АЧХ получили ширину полосы режекции ∆ fT =0 , 4.
3.4 Выбор разрядности АЦП и его тактовой частоты. Оценка
требуемого объема ОЗУ
В
современных
РЛС
первичная
обработка
радиолокационной
информации осуществляется цифровыми устройствами, поэтому необходимо
рассчитать
быстродействие
и
разрядность
аналого-цифровых
u
max
преобразователей (АЦП). При этом динамический диапазон d= u , а
min
требуемое
число
двоичных
разрядов
кода
m=log 2 d .
Следовательно,
отношение динамического диапазона сигналов или помех на входе АЦП (в
дБ) к числу двоичных разрядов
k k=
20 log 10 d
дБ
=6
.
log 2 d
разряд
(2.4.1)
При известном динамическом диапазоне (дБ) число разрядов АЦП
m=
d d
=
kk 6
(2.4.2)
d
В нашем случае возьмем d=70 дБ, тогда m= 6 ≈ 12 разрядов.
14
15.
БыстродействиеАЦП
определяется
затратами
времени
на
преобразование, которые должны быть меньше длительности временного
τ и 1∙ 10−6
1
дискрета, т.е. ∆ t= =
. Тогда частота дискретизации F CLK = ∆ t =12 МГц .
m
12
Минимальный
объем
ОЗУ
рассчитывается
как
произведение
разрядности АЦП m на количество каналов по дальности или скорости (в
зависимости от заданного режима работы РЛК), число импульсов в пачке N и
количество элементов разрешения по азимуту и углу места.
ОЗУ =m∙ N ∙ N FFT ∙ mα ∙ m β =11404800 бит=1,36 МБайт.
15
16.
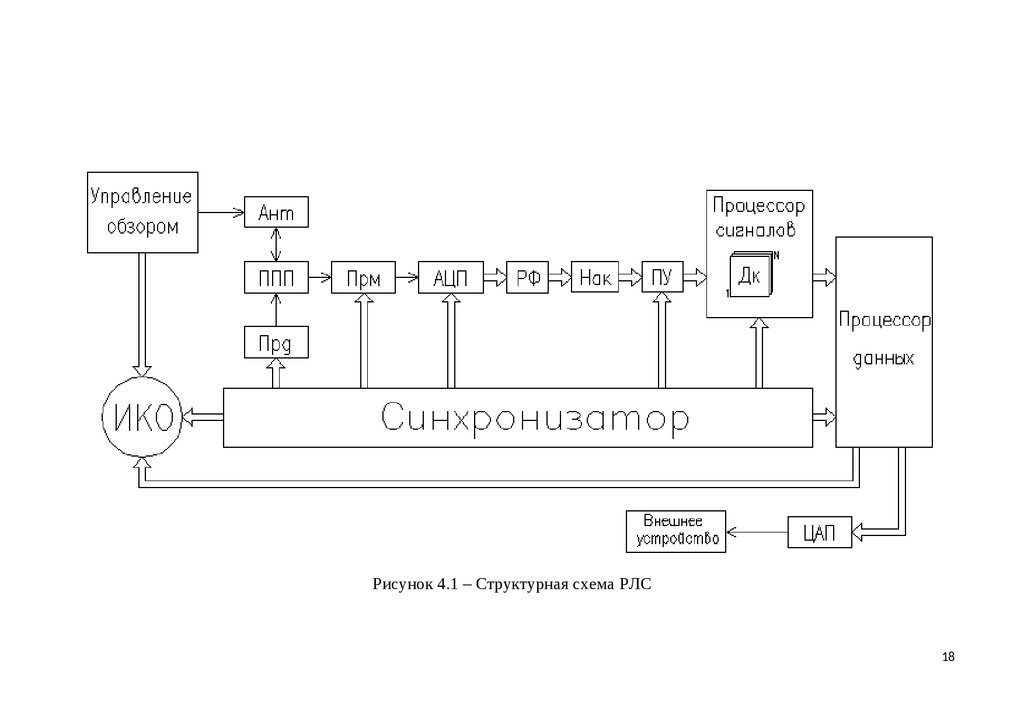
4 Разработка структурной схемы РЛС и описание её работыСтруктурная схема РЛС приведена на рисунке 4.1.
В рассматриваемой РЛС используется импульсный режим излучения,
поэтому в момент окончания очередного зондирующего радиоимпульса
единственная антенна переключается от передатчика к приемнику и
используется для приема до начала генерации следующего зондирующего
радиоимпульса, после чего антенна снова подключается к передатчику и т.д.
Эта операция выполняется переключателем прием-передача (ППП).
Пусковые импульсы, задающие период повторения зондирующих
сигналов и синхронизирующие работу всех подсистем РЛС, генерирует
синхронизатор (Синх). Сигнал с приемника (Прм) после аналого-цифрового
преобразователя АЦП поступает на аппаратуру обработки информации процессор сигналов, где выполняется первичная обработка информации,
состоящая в обнаружении сигнала и измерении координат цели. Также
процессор сигналов включает в себя процессор быстрого преобразования
Фурье (БПФ), число доплеровских каналов (Дк) по скорости которого равно
16. Отметки целей и трассы траекторий формируются при вторичной
обработке информации в процессоре данных.
Сигнал с процессора данных поступает на цифро-аналоговый
преобразователь (ЦАП), с выхода которого в аналоговой форме передается
на внешнее устройство.
Сформированные сигналы вместе с информацией об угловом
положении антенны передаются для дальнейшей обработки на командный
пункт, а также для контроля на индикатор кругового обзора (ИКО). При
автономной работе радиолокатора ИКО служит основным элементом для
наблюдения воздушной обстановки. Для этого предусмотрено устройство
преобразования сигнала в цифровой код (АЦП). Режекторный фильтр (РФ)
совместно с накопителем (Нак) ставят после АЦП. На выходе Нак
используют пороговое устройство (ПУ). Для обнаружения целей на фоне
пассивных помех используется то обстоятельство, что несущая частота
16
17.
полезных сигналов, отраженных от представляющих интерес движущихсяцелей (самолеты, вертолеты и др.), поступающих на вход приемника РЛС,
изменяется на величину доплеровского сдвига. Стоит отметить, что тонкими
линиями
на
схеме
изображены
перемещения
аналоговых
сигналов,
широкими – цифровых сигналов.
17
18.
Рисунок 4.1 – Структурная схема РЛС18
19.
5 ЗаключениеРадиолокационные системы относятся к классу радиотехнических
систем извлечения информации об объектах из принимаемого радиосигнала.
Таким образом, РЛС осуществляют поиск и обнаружение радиосигнала с
последующим
измерением
его
параметров,
содержащих
полезную
информацию. В РЛС задачи обнаружения и определения местоположения
цели решаются, как правило, без помощи аппаратуры объекта.
Определение местоположения ОЛ в РЛС требует измерения координат
объекта (цели). В некоторых ситуациях необходимо также знание
составляющих вектора скорости объекта (цели). Геометрические или
механические величины, которые характеризуют положение и перемещение
объекта или цели, называют локационными элементами (W).
Радиолокационные системы обычно используются в качестве датчиков
информации в более сложных структурах - комплексах.
В данной работе был произведен расчет системных параметров
наземной импульсно-доплеровской РЛС обнаружения, выбрана разрядность
АЦП станции. Также представлено краткое описание РЛС по ее структурной
схеме.
19
20.
6 Библиографический список1 Бакулев П.А. Радиолокационные системы. – М.: Радиотехника, 2015.
– 440 c.: ил.
2 Лезин Ю.С. Введение в теорию и технику радиотехнических систем.
– М.: Радио и связь, 1986. – 280 c.: ил.
3
Расчет
системных
параметров
наземных
импульсных
радиолокационных комплексов обнаружения. Методические указания к
курсовому проектированию. Рязан. гос. радиотехн. ун-т; сост. И.С. Холопов.
Рязань, 2012. – 16 с.
4 Расчет системных параметров бортовых когерентно-импульсных
радиолокационных систем при неоднозначности измерений: методические
указания к самостоятельной работе / Рязан. гос. радиотехн. ун-т; сост.: С.А.
Юкин, И.С. Холопов. Рязань, 2012. – 16 с.
20