










 Военное дело
Военное делоПохожие презентации:







")


Зондирующий сигнал и его характеристики. Лекция №3. Часть 1. Теоретические основы радиолокации
1.
Военно-инженерный институтДисциплина
«ОСНОВЫ ТЕОРИИ РАДИОЛОКАЦИОННЫХ
СИСТЕМ И КОМПЛЕКСОВ»
Часть 1. Теоретические основы
радиолокации
Зондирующий сигнал и его
характеристики
2.
дать характеристику зондирующим сигналам РЛС,раскрыв содержание их классификации, формального
описания и параметров, по которым сигналы
сравниваются и выбираются.
3.
1. Виды и математические моделизондирующих сигналов.
2. Основные характеристики
зондирующих сигналов.
3. Сложные энергоёмкие сигналы.
4.
с.37-43, 59-60;5.
6.
Под зондирующим радиолокационным сигналом (ЗС) понимают радиоволну,излученную передающей антенной РЛС в пространство. В активной
радиолокации с пассивным ответом зондирующие сигналы обеспечивают
появление отраженных от целей сигналов.
В качестве зондирующего сигнала (ЗС) в основном используются колебания СВЧ
(3.1012 150.106 Гц).
Обозначения
США
f0, ГГц
f0, ГГц
λ0
К
Х
С
S
L
P
VHF
12-40
38
8 мм
8-12
10
3 см
4-8
6
5 см
2-4
3,4
9 см
1-2
1,3
23 см
300-900
430
70 см
30-30
120
2,5 м
В общем случае ЗС может быть представлен в виде:
x(t) = X(t)·cоs(2 fot + (t) + o),
(1)
где X(t), (t) - законы амплитудной и фазовой модуляции;
fo - несущая частота;
0 - начальная фаза.
В комплексной форме зондирующий сигнал записывается таким образом:
x(t ) X (t )e
где
X
x tt ee
(2)
j φ t φ 0
комплексная амплитуда сигнала.
j ( 2π
2 f 0f 0t t φ ((tt)) φ 00 ))
X t X t e
j 2j 2π
ff00tt
7.
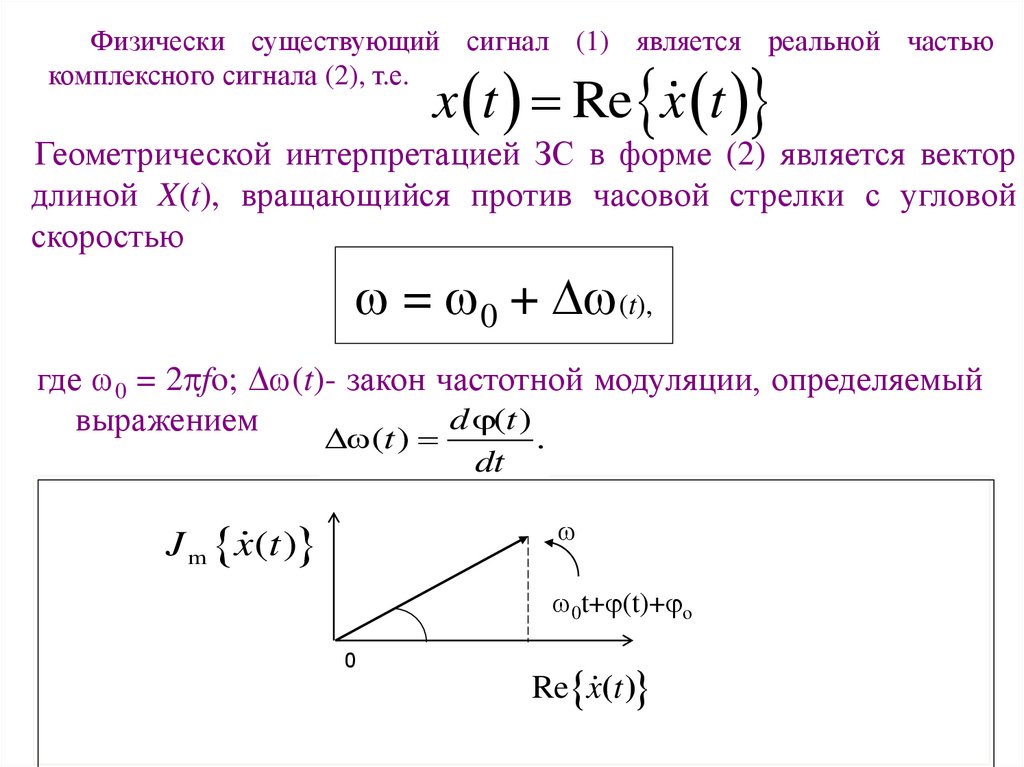
Физически существующий сигнал (1) является реальной частьюкомплексного сигнала (2), т.е.
x t Re x t
Геометрической интерпретацией ЗС в форме (2) является вектор
длиной X(t), вращающийся против часовой стрелки с угловой
скоростью
= 0 + (t),
где 0 = 2 fo; (t)- закон частотной модуляции, определяемый
d (t )
выражением
(t )
J m x (t )
dt
.
0t+ (t)+ o
0
Re x(t )
8.
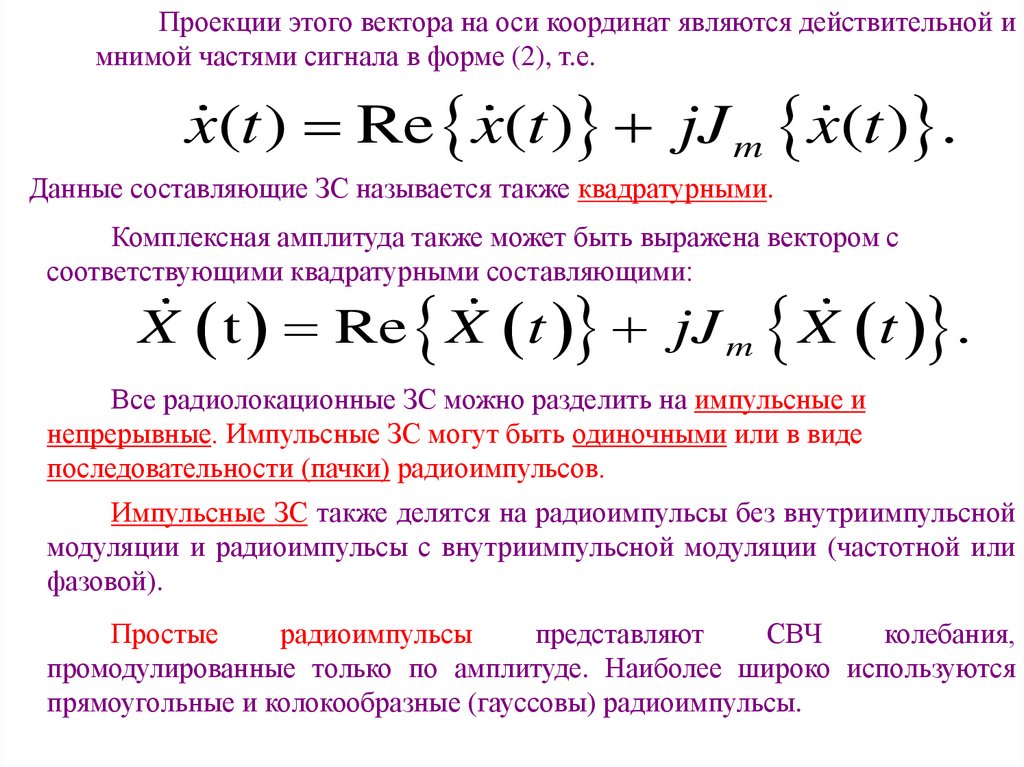
Проекции этого вектора на оси координат являются действительной имнимой частями сигнала в форме (2), т.е.
x(t ) Re x(t ) jJ m x(t ) .
Данные составляющие ЗС называется также квадратурными.
Комплексная амплитуда также может быть выражена вектором с
соответствующими квадратурными составляющими:
X t Re X t jJ m X t .
Все радиолокационные ЗС можно разделить на импульсные и
непрерывные. Импульсные ЗС могут быть одиночными или в виде
последовательности (пачки) радиоимпульсов.
Импульсные ЗС также делятся на радиоимпульсы без внутриимпульсной
модуляции и радиоимпульсы с внутриимпульсной модуляции (частотной или
фазовой).
Простые
радиоимпульсы
представляют
СВЧ
колебания,
промодулированные только по амплитуде. Наиболее широко используются
прямоугольные и колокообразные (гауссовы) радиоимпульсы.
9.
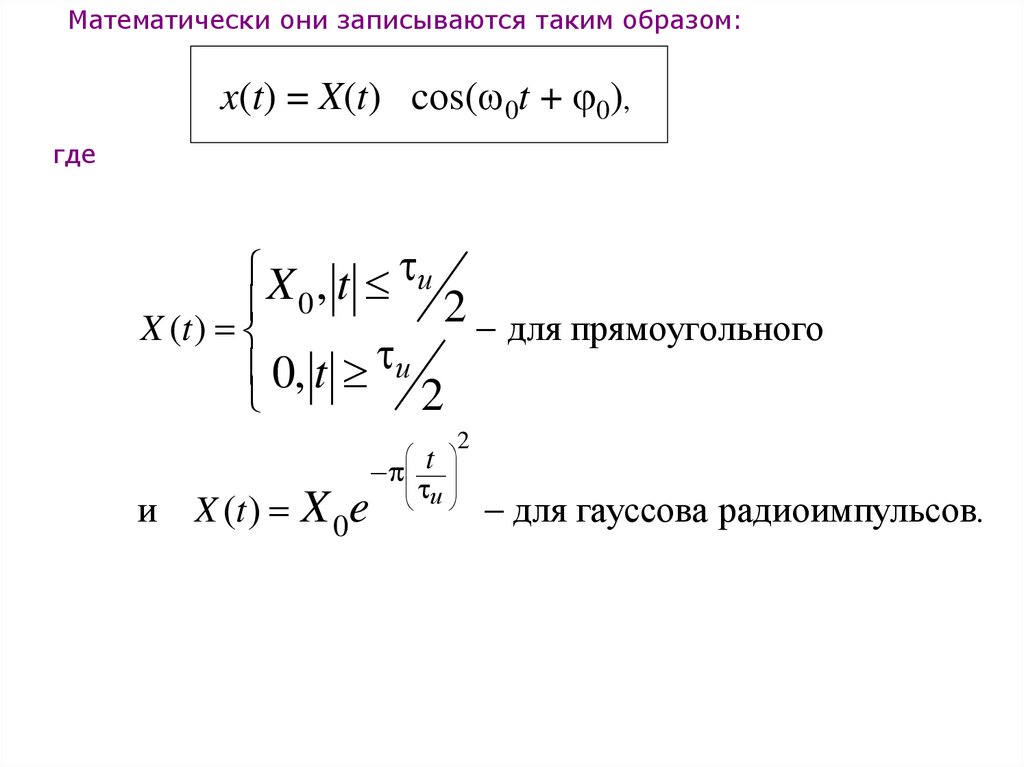
Математически они записываются таким образом:x(t) = X(t) cоs( 0t + 0),
где
X , t и
0
2 для прямоугольного
X (t )
0, t и
2
и
X (t ) X 0e
t
и
2
для гауссова радиоимпульсов.
10.
Графически законы модуляции и сами радиоимпульсывыглядят следующим образом
X(t)
τ /2
- и
0
x(t)
0
X(t)
X0
xm0
τи/2
0
t
x(t)
t
0
t
В РЛС находят широкое применение ЗС в виде пачки
радиоимпульсов:
M
x(t ) X к t к 1 Т cos 2 f 0t к к ,
к 1
Т - период повторения импульсов;
М - число импульсов в последовательности;
φк - начальная фаза к-го импульса.
11.
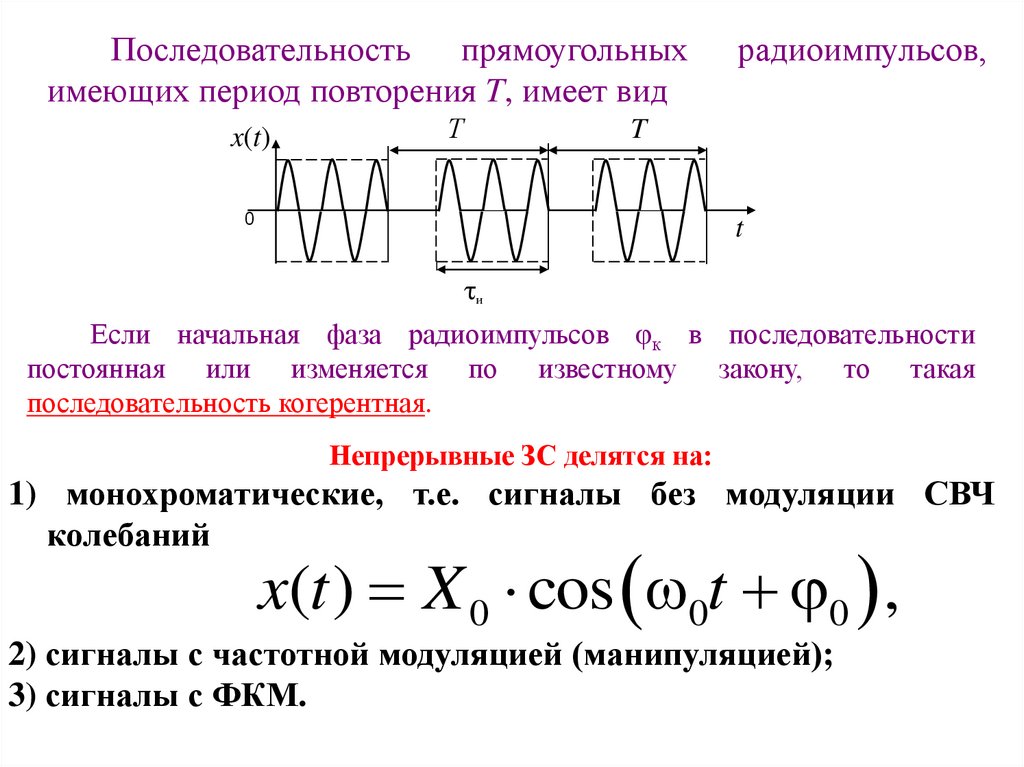
Последовательность прямоугольныхимеющих период повторения T, имеет вид
x(t)
Т
радиоимпульсов,
T
0
t
и
Если начальная фаза радиоимпульсов φк в последовательности
постоянная или изменяется по известному закону, то такая
последовательность когерентная.
Непрерывные ЗС делятся на:
1) монохроматические, т.е. сигналы без модуляции СВЧ
колебаний
x(t ) X 0 cos 0t 0 ,
2) сигналы с частотной модуляцией (манипуляцией);
3) сигналы с ФКМ.
12.
1.Таким образом, для решения задач РЛ применяютсяразличные виды ЗС: импульсные, непрерывные, с
внутриимпульсной модуляцией и без таковой, одиночные и
пачечные.
2.Конкретный вид используемого сигнала определяется
требованиями к качеству решения задач РЛ и,
соответственно, требованиями к характеристикам РЛС.
13.
14.
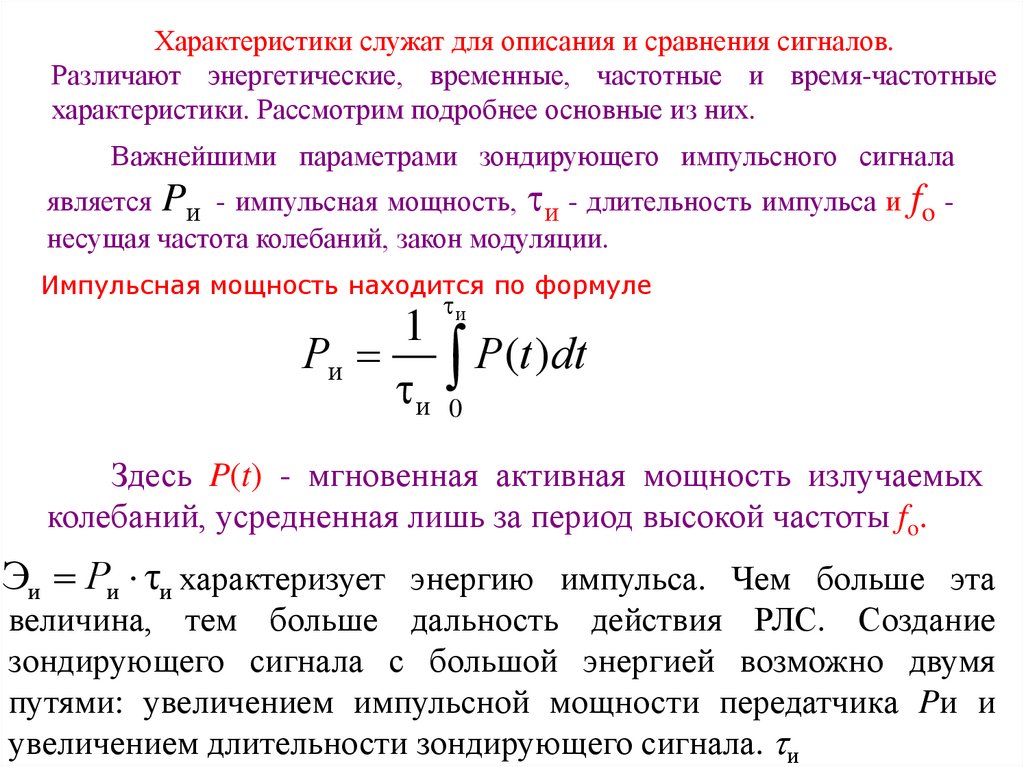
Характеристики служат для описания и сравнения сигналов.Различают энергетические, временные, частотные и время-частотные
характеристики. Рассмотрим подробнее основные из них.
Важнейшими параметрами зондирующего импульсного сигнала
является Pи - импульсная мощность, и - длительность импульса и fo несущая частота колебаний, закон модуляции.
Импульсная мощность находится по формуле
и
1
Ри Р(t )dt
и 0
Здесь P(t) - мгновенная активная мощность излучаемых
колебаний, усредненная лишь за период высокой частоты fo.
Эи Ри τи характеризует энергию импульса. Чем больше эта
величина, тем больше дальность действия РЛС. Создание
зондирующего сигнала с большой энергией возможно двумя
путями: увеличением импульсной мощности передатчика Pи и
увеличением длительности зондирующего сигнала. и
15.
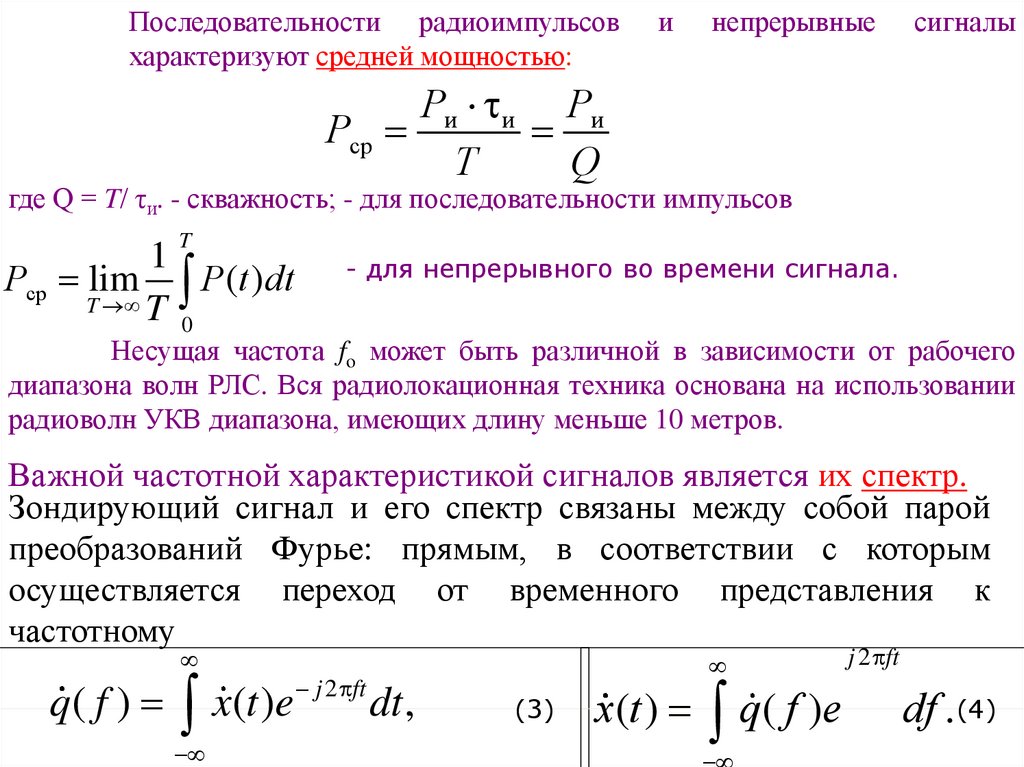
Последовательности радиоимпульсовхарактеризуют средней мощностью:
и
непрерывные
сигналы
Ри и Ри
Рср
Т
Q
где Q = T/ τи. - скважность; - для последовательности импульсов
T
1
Рср lim P (t )dt
T T
0
- для непрерывного во времени сигнала.
Несущая частота fo может быть различной в зависимости от рабочего
диапазона волн РЛС. Вся радиолокационная техника основана на использовании
радиоволн УКВ диапазона, имеющих длину меньше 10 метров.
Важной частотной характеристикой сигналов является их спектр.
Зондирующий сигнал и его спектр связаны между собой парой
преобразований Фурье: прямым, в соответствии с которым
осуществляется переход от временного представления к
частотному
q( f ) x(t )e j 2 ft dt ,
(3)
х(t ) q ( f )e
j 2 ft
df .(4)
16.
Аналогичная связь существует между законом модуляциии его спектром
G ( f ) X (t )t
j 2 ft
dt ,
X (t ) G ( f )e
j 2 ft
df .
Спектр сигнала представляют в виде АЧС и ФЧС:
g( f ) g( f ) e
где |g( f )| - АЧС сигнала;
arg g( f ) - ФЧС сигнала.
j arg g ( f )
,
17.
АЧС типовых простых сигналов выглядят следующим образомġ( f )
прямоугольного
радиоимпульса
ġ(f)
пачки
радиоимпульсов
1/МТ
1/Т
f0 -1/ и
f0
f0 +1/ и
f
f0 -1/ и
f0
f0 +1/ и
Область частот, в пределах которой сосредоточена
основная часть всей энергии сигнала, называется
шириной спектра Δfc. Обычно ширина спектра
определяется полосой частот, где сосредоточено
~90% энергии сигнала. Например, ширина спектра
прямоугольного радиоимпульса и их пачки равна Δfc
= 1/ и.
18.
Автокорреляционная функция (АКФ).АКФ характеризует взаимосвязь между двумя значениями
зондирующего сигнала, разнесенными по времени на
интервал τ. Она определяется выражением
rx ( ) x(t ) x (t )dt
АКФ закона модуляции ЗС может быть определена
Rx X (t ) X (t )dt
19.
Энергетический спектр.Энергетический спектр зондирующего сигнала можно
определить как распределение вдоль оси частот его энергии.
Энергетический спектр ограниченного во времени
τ
зондирующего сигнала выражается через его АКФ
j
2
f
S ( f ) rx ( )e
d ,
j
2
f
rx ( ) S ( f )e
df .
Энергетический спектр и корреляционная функция связаны
друг с другом прямым и обратным преобразованиями Фурье,
имеющими вид:
Из взаимосвязи энергетического спектра с АКФ сигнала
следует важный вывод, что чем шире энергетический спектр, тем
уже пик АКФ, т.е. тем меньше время корреляции зондирующего
сигнала.
20.
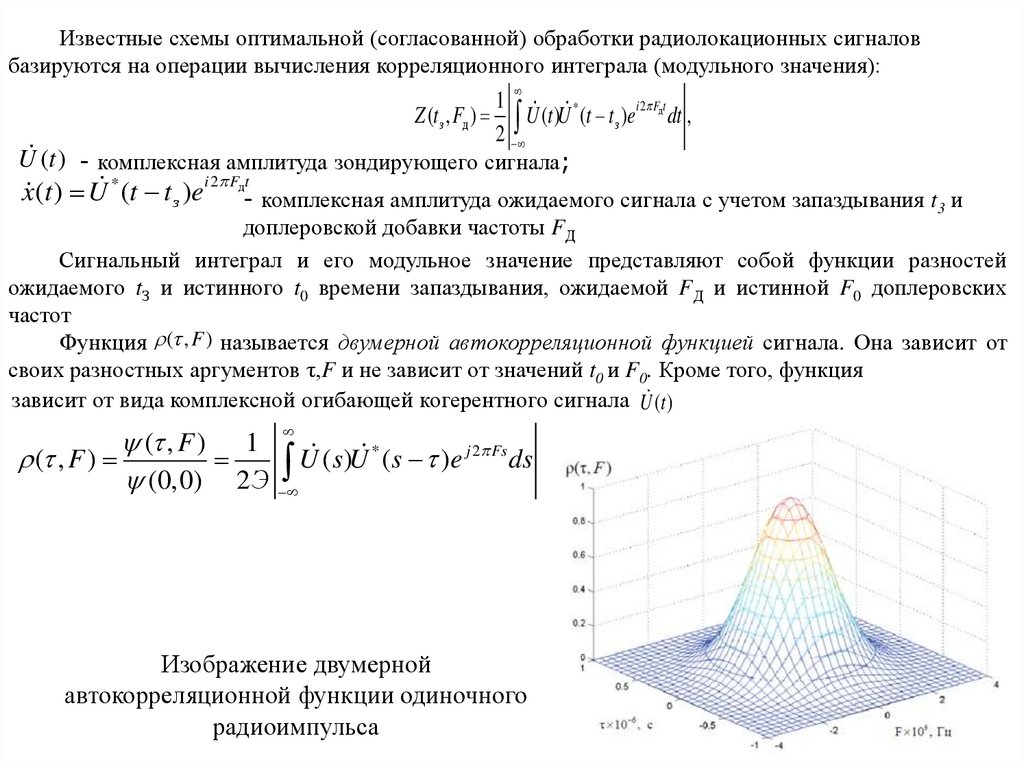
Известные схемы оптимальной (согласованной) обработки радиолокационных сигналовбазируются на операции вычисления корреляционного интеграла (модульного значения):
1
i 2 F t
Z (t з , Fд ) U (t )U * (t t з )e д dt ,
2
U (t ) - комплексная амплитуда зондирующего сигнала;
x(t ) U * (t t з )e
i 2 Fдt
- комплексная амплитуда ожидаемого сигнала с учетом запаздывания t3 и
доплеровской добавки частоты FД
Сигнальный интеграл и его модульное значение представляют собой функции разностей
ожидаемого tЗ и истинного t0 времени запаздывания, ожидаемой FД и истинной F0 доплеровских
частот
Функция ( , F ) называется двумерной автокорреляционной функцией сигнала. Она зависит от
своих разностных аргументов τ,F и не зависит от значений t0 и F0. Кроме того, функция
зависит от вида комплексной огибающей когерентного сигнала U (t )
( , F ) 1
( , F )
U ( s)U * ( s )e j 2 Fs ds
(0,0) 2Э
Изображение двумерной
автокорреляционной функции одиночного
радиоимпульса
21.
1.Таким
образом,
к
основным
характеристикам
зондирующих
сигналов
относятся:
закон
модуляции,
длительность, мощность и энергия, АКФ, время корреляции,
энергетический спектр, ширина спектра, которые и определяют
ТТХ РЛС.
2. Эти характеристики различны для конкретных видов ЗС и
во многом будут определять структуру устройств обработки
радиолокационных сигналов.
22.
23.
В настоящее время в радиолокации широко используются два видасложных сигналов: линейно-частотно-модулированные (ЛЧМ сигналы) и
фазо-кодо-манипулированные (ФКМ сигналы).
Радиоимпульсы с внутриимпульсной частотной модуляцией
(манипуляцией).
Передающее устройство формирует радиоимпульсы большой длительности, частота
в пределах длительности импульса изменяется по определенному закону:
линейному (ЛЧМ), параболическому и т.д. Для ЛЧМ радиоимпульсов закон
частотной модуляции описывается выражением:
t 0
f
f (t ) f 0
t;
и
t и
где Δf - девиация
частоты.
Ему соответствует квадратичный закон изменения фазы
φ(t)=2 fоt + bt2 + φо,
где b - параметр фазовой модуляции, равный
f
b
.
и
24.
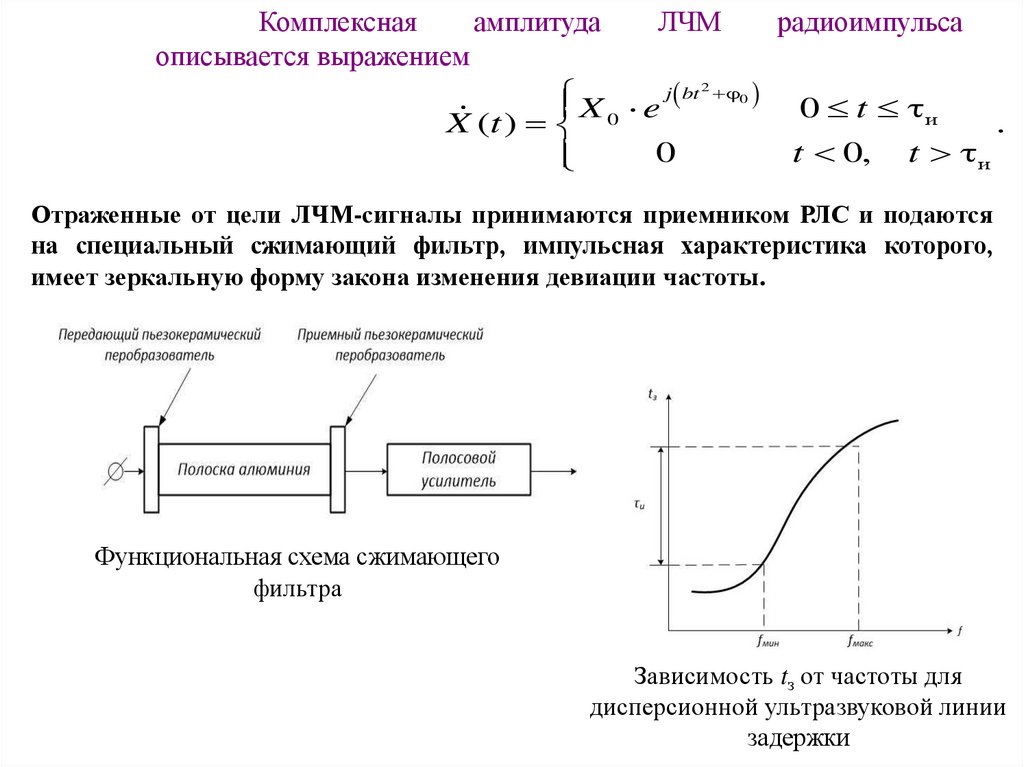
Комплекснаяамплитуда
ЛЧМ
радиоимпульса
описывается выражением
j bt 2 0
X e
0 t и
X (t ) 0
.
0
t 0, t и
Отраженные от цели ЛЧМ-сигналы принимаются приемником РЛС и подаются
на специальный сжимающий фильтр, импульсная характеристика которого,
имеет зеркальную форму закона изменения девиации частоты.
Функциональная схема сжимающего
фильтра
Зависимость tз от частоты для
дисперсионной ультразвуковой линии
задержки
25.
τиτи
u
u
u
t
а)
t
t3
в)
д)
t3
f
τи сж
f1
Вход
б)
f2
г)
t
f2
f1
Выход
Сжимающий
фильтр
f
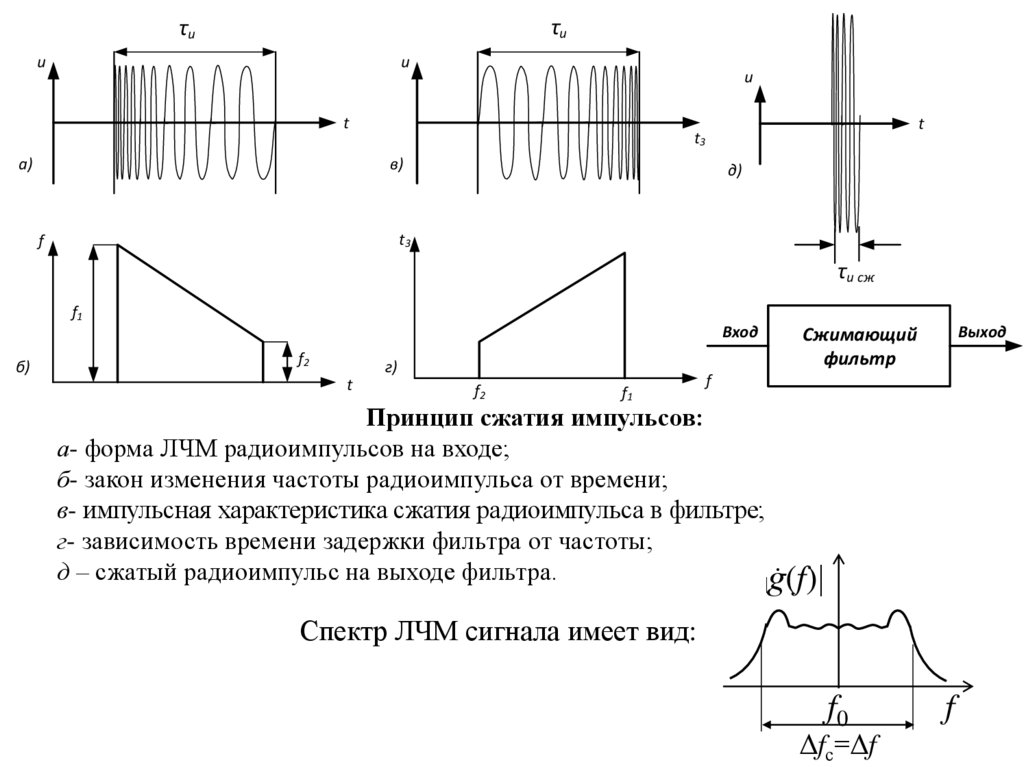
Принцип сжатия импульсов:
а- форма ЛЧМ радиоимпульсов на входе;
б- закон изменения частоты радиоимпульса от времени;
в- импульсная характеристика сжатия радиоимпульса в фильтре;
г- зависимость времени задержки фильтра от частоты;
д – сжатый радиоимпульс на выходе фильтра.
ġ(f)
Спектр ЛЧМ сигнала имеет вид:
f0
Δfс=Δf
f
26.
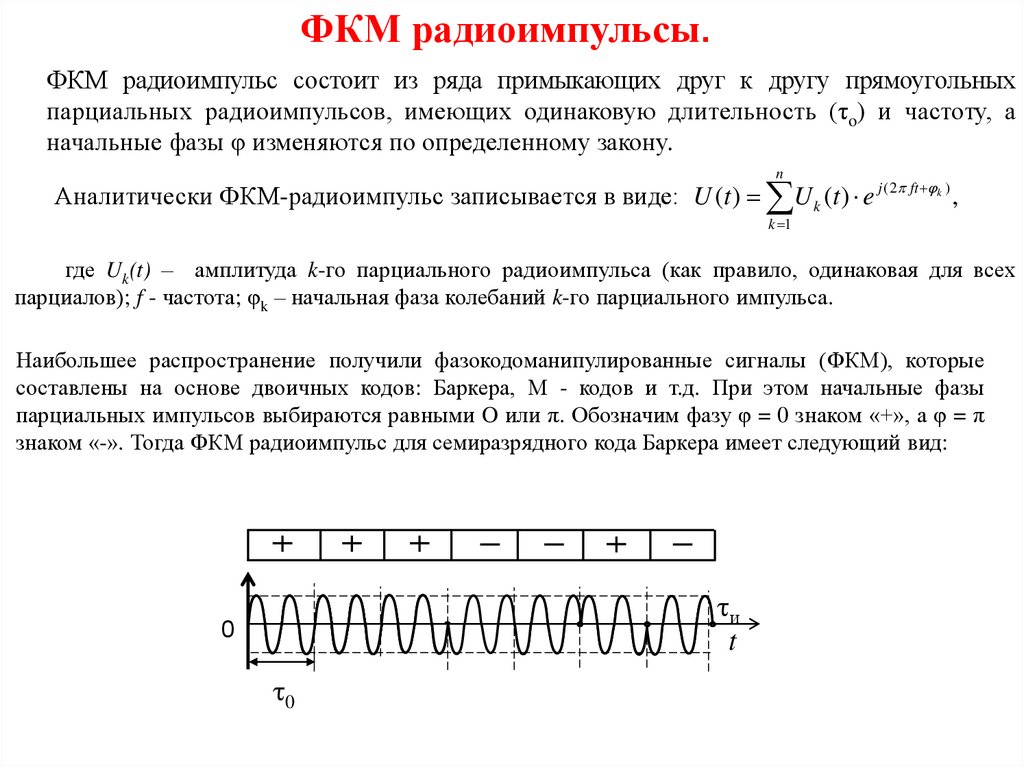
ФКМ радиоимпульсы.ФКМ радиоимпульс состоит из ряда примыкающих друг к другу прямоугольных
парциальных радиоимпульсов, имеющих одинаковую длительность (τo) и частоту, а
начальные фазы φ изменяются по определенному закону.
n
Аналитически ФКМ-радиоимпульс записывается в виде: U (t ) U k (t ) e j (2 ft k ) ,
k 1
где Uk(t) – амплитуда k-го парциального радиоимпульса (как правило, одинаковая для всех
парциалов); f - частота; φk – начальная фаза колебаний k-го парциального импульса.
Наибольшее распространение получили фазокодоманипулированные сигналы (ФКМ), которые
составлены на основе двоичных кодов: Баркера, М - кодов и т.д. При этом начальные фазы
парциальных импульсов выбираются равными O или π. Обозначим фазу φ = 0 знаком «+», а φ = π
знаком «-». Тогда ФКМ радиоимпульс для семиразрядного кода Баркера имеет следующий вид:
и
t
0
0
27.
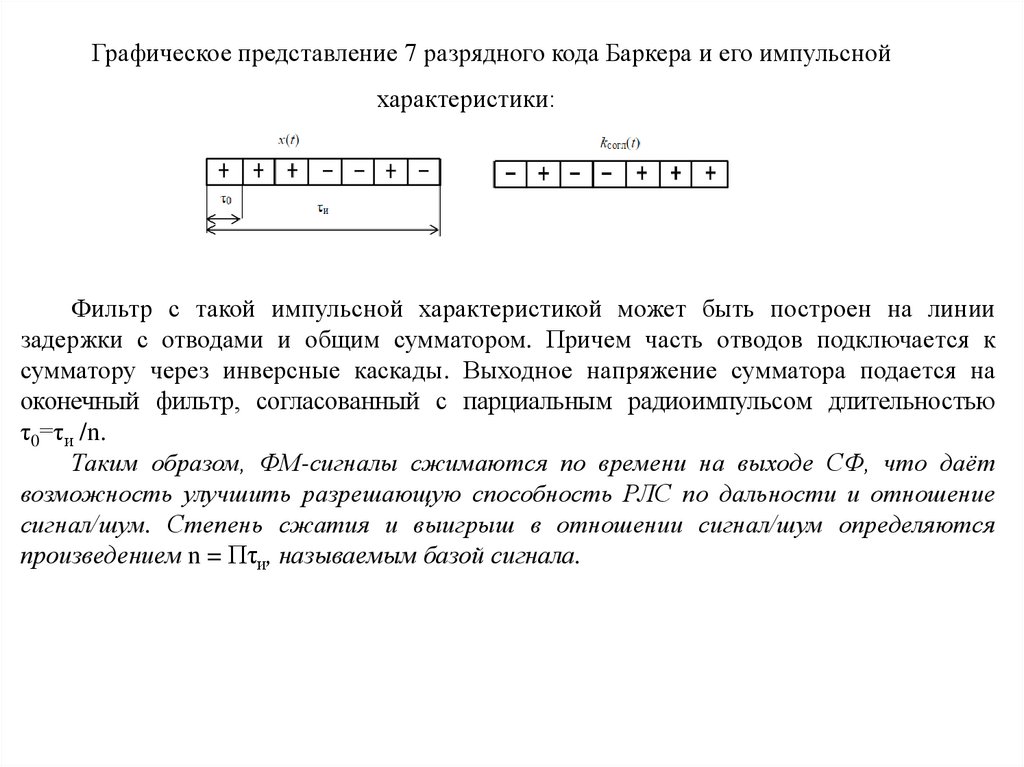
Графическое представление 7 разрядного кода Баркера и его импульснойхарактеристики:
Фильтр с такой импульсной характеристикой может быть построен на линии
задержки с отводами и общим сумматором. Причем часть отводов подключается к
сумматору через инверсные каскады. Выходное напряжение сумматора подается на
оконечный фильтр, согласованный с парциальным радиоимпульсом длительностью
τ0=τи /n.
Таким образом, ФМ-сигналы сжимаются по времени на выходе СФ, что даёт
возможность улучшить разрешающую способность РЛС по дальности и отношение
сигнал/шум. Степень сжатия и выигрыш в отношении сигнал/шум определяются
произведением n = Пτи, называемым базой сигнала.
28.
Процесс оптимальной фильтрации ФМ-сигнала:а - согласованный фильтр ФМ-сигнала (кода Баркера для n = 7); б) результат
когерентного суммирования; в - выходное напряжение фильтра
29.
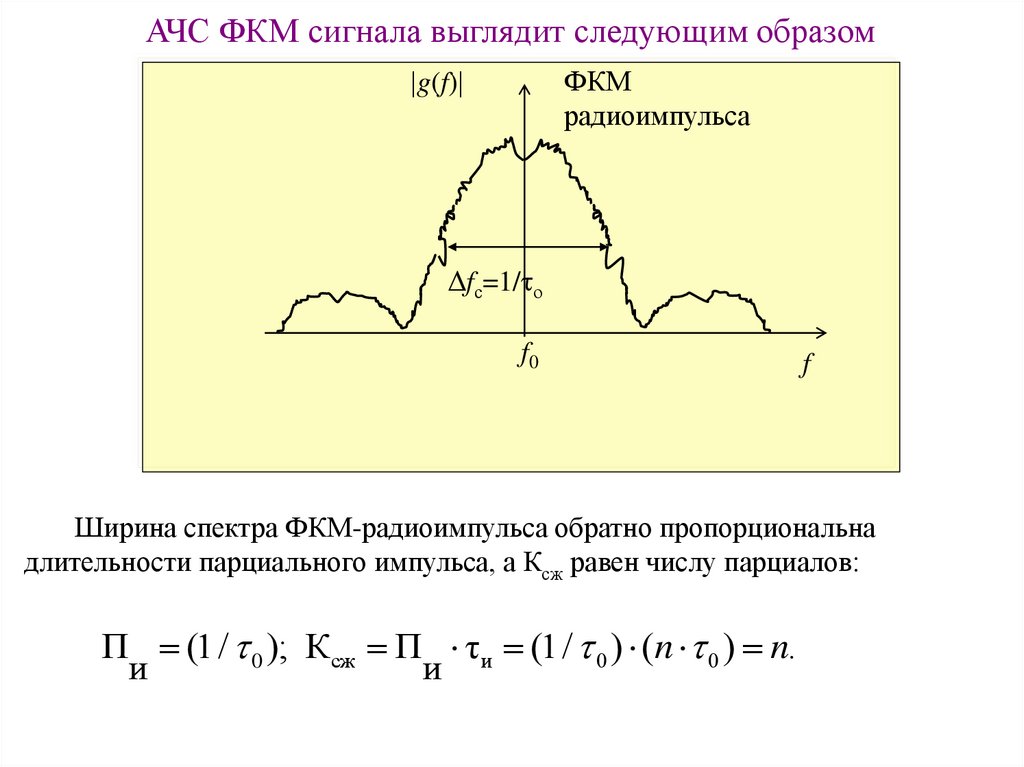
АЧС ФКМ сигнала выглядит следующим образомg(f)
ФКМ
радиоимпульса
Δfс=1/ о
f0
f
Ширина спектра ФКМ-радиоимпульса обратно пропорциональна
длительности парциального импульса, а Ксж равен числу парциалов:
П (1/ 0 ); Ксж П τи (1/ 0 ) (n 0 ) n.
и
и
30.
Таким образом, основными широкополоснымисигналами, применяемыми в РЛС, являются
ЛЧМ и ФКМ радиоимпульсы.
31.
1.Для решения задач РЛ применяются различные виды ЗС:
импульсные, непрерывные, с внутриимпульсной модуляцией и
без таковой, одиночные и пачечные.
Конкретный вид используемого сигнала определяется
требованиями к качеству решения задач РЛ и, соответственно,
требованиями к характеристикам РЛС.
2. К основным характеристикам зондирующих сигналов
относятся: закон модуляции, длительность, мощность и энергия,
АКФ, время корреляции, энергетический спектр, ширина
спектра, которые и определяют ТТХ РЛС.
Эти характеристики различны для конкретных видов ЗС и во
многом будут определять структуру устройств обработки
радиолокационных сигналов.
3. Основными широкополосными сигналами, применяемыми в
РЛС являются ЛЧМ и ФКМ радиоимпульсы.
32.
Отработать материал лекции в соответствии срекомендованной литературой:
Л 1/о, с.37-43, 59-60;
Л 2/д, с.20-54.
33.
Спасибо завнимание!