
 Механика
Механика География
ГеографияПохожие презентации:


")







Тема 4. Элементы теории, устройство, схема работы навигационного гироазимуткомпаса
1.
ПМ.01 «Управление и эксплуатация судна с правом эксплуатациисудовых энергетических установок»
МДК 01.02 «Управление судном и технические средства судовождения»
Раздел 01.02.02. «Технические средства судовождения»
Тема 4: «Основы теории, принцип
действия, устройство и эксплуатация
гирокомпасов»
«Элементы теории, устройство, схема работы
навигационного гироазимуткомпаса»
Лектор: Шестаков Никита Викторович
2.
1. Элементы теории ГА2. Устройство, схема работы современных ГА
3. Погрешности ГА
3.
Элементы теории ГАГироазимутом (ГА) называется гироскопическое судовое
навигационное устройство, предназначенное для
сохранения какого-либо определенного направления в
горизонтальной плоскости и измерения углов относительно
данного направления.
В качестве ЧЭ в ГА применяют свободный гироскоп с тремя
степенями свободы, главная ось которого расположена
горизонтально.
В отличии от ГК у ЧЭ любого ГА его центр тяжести должен
быть совмещен с точкой подвеса. По этой причине ГА не
обладает избирательностью по отношению к плоскости
меридиана, но и не имеет инерционных погрешностей.
4.
Однако для целей судовождения необходимо знать в течениидлительного времени азимутальное направление
относительно географического меридиана. Однако так как
имеется суточное вращение Земли и движения судна главная
ось гироскопа имеет видимый увод относительно как
плоскости горизонта, так и меридиана.
Для превращения гироскопа в ГА необходимо:
1. Принудительно удерживать главную ось в
горизонтальной плоскости.
2. Компенсировать увод гироскопа в азимуте.
Таким образом, при выполнении указанных условий показания
гироазимута будут неизменны относительно плоскости
истинного меридиана и прибор может использоваться в
5.
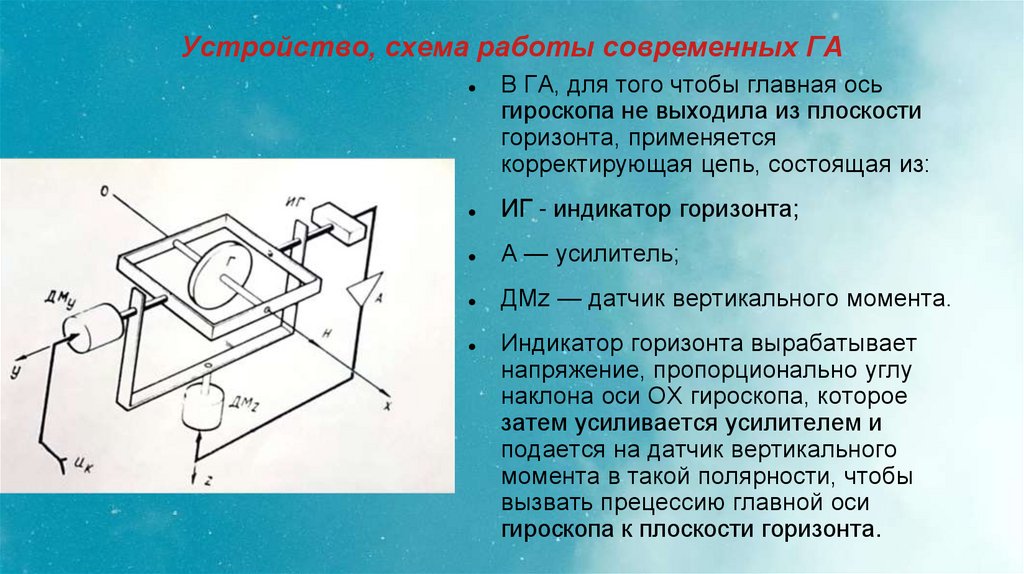
Устройство, схема работы современных ГАВ ГА, для того чтобы главная ось
гироскопа не выходила из плоскости
горизонта, применяется
корректирующая цепь, состоящая из:
ИГ - индикатор горизонта;
А — усилитель;
ДМz — датчик вертикального момента.
Индикатор горизонта вырабатывает
напряжение, пропорционально углу
наклона оси OX гироскопа, которое
затем усиливается усилителем и
подается на датчик вертикального
момента в такой полярности, чтобы
вызвать прецессию главной оси
гироскопа к плоскости горизонта.
6.
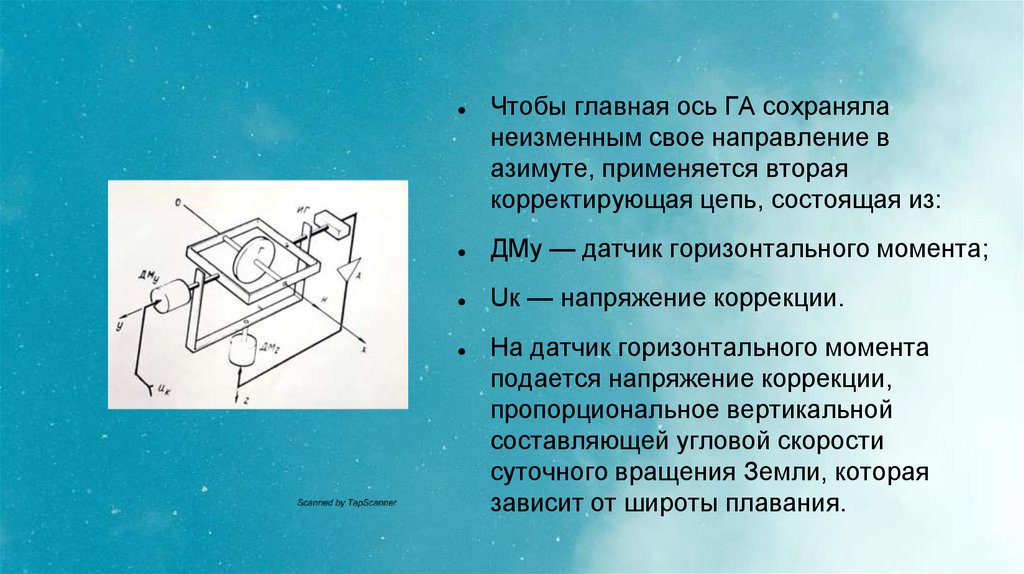
Чтобы главная ось ГА сохраняланеизменным свое направление в
азимуте, применяется вторая
корректирующая цепь, состоящая из:
ДМу — датчик горизонтального момента;
Uк — напряжение коррекции.
На датчик горизонтального момента
подается напряжение коррекции,
пропорциональное вертикальной
составляющей угловой скорости
суточного вращения Земли, которая
зависит от широты плавания.
7.
Погрешности ГАГА не обладает направляющим моментом, что является
существенным его недостатком. Отсутствие свойства
избирательности, приводит со временем к возрастанию
погрешностей в показаниях ГА. Рассмотрим характерные из
них:
1. Погрешность из-за смещения центра тяжести ротора
гироскопа δαц.т.: смещение ц.т. относительно точки подвеса
приводит к появлению вращающего момента вокруг оси OY
и уходу гироскопа от заданного направления. Такие
смещения могут возникать из-за неточной балансировки
прибора, люфтов в подшипниках, температурных и
механических деформаций.
8.
2. Широтная погрешность δαφ: возникает в показаниях ГАвследствие неточного ввода широты. Широтная погрешность
зависит от широты места, скорости судна.
3. Скоростная погрешность δαv: возникает вследствие
неточного ввода скорости. Эта погрешность максимальна на
курсах 0 и 180. Особо ощутимо она достигает при плавании в
высоких широтах и накапливается с течением времени.
4. Погрешность из-за воздействия ускорений δαω : возникает
при маневрировании судна и на качке.
5. Карданная погрешность: возникает при одновременных
поворотах судна вокруг трех осей (поворот с креном и
дифферентом). Это происходит потому, что вместе с судном
наклоняется вертикальная рамка, а значит и картушка. Для
исключения данной погрешности прибор должен быть
установлен на стабилизированном в плоскости горизонта
9.
Таким образом, ГА присуще погрешности,носящие систематический и случайный
характер. Наиболее существенная
погрешность появляется от дрейфа оси
гироскопа. Поэтому при длительном
использовании ГА его показания необходимо
исправлять по данным МК или ГК.
При плавании судоводители должны четко
понимать и представлять все погрешности, а
так же пути их уменьшения.