



















 Электроника
Электроника Военное дело
Военное делоПохожие презентации:


")



")


: история, понятие, назначение, функции")
Система управления группой БПЛА
1.
Система управления группой БПЛАВыполнила: Группа №2:
Гордеев Владислав Дмитриевич
Чугунов Данила Владимирович
2.
Цель проектаЦелью данного проекта является создание приложения
предназначенного для управления группами БПЛА.
1
3.
Актуальность темыЗа последние годы отрасль показывает рост[1, 2]. Также в
прогнозах эта тенденция продолжается[3, 4].
Статистика инвестиций в индустрию БПЛА
Прогноз инвестиций в сферу
2
4.
Актуальность темыВ структуре коммерческой сферы
преобладают
беспилотники
предназначенные для фотосъёмки[4].
На
диаграмме
представлено
распределение
сфер
по
числу
использования БПЛА. Где максимальные
значения имеют сферы фотосъёмки,
мониторинг объектов инфраструктуры.
3
5.
Актуальность темыИспользование
БПЛА
имеет
следующие преимущества по
отношению
к
пилотируемым
объектам:
- Исключение
человеческого
фактора
- Меньшая стоимость работ
- Меньшее число регламентных
операций
- Большая безопасность работ
4
6.
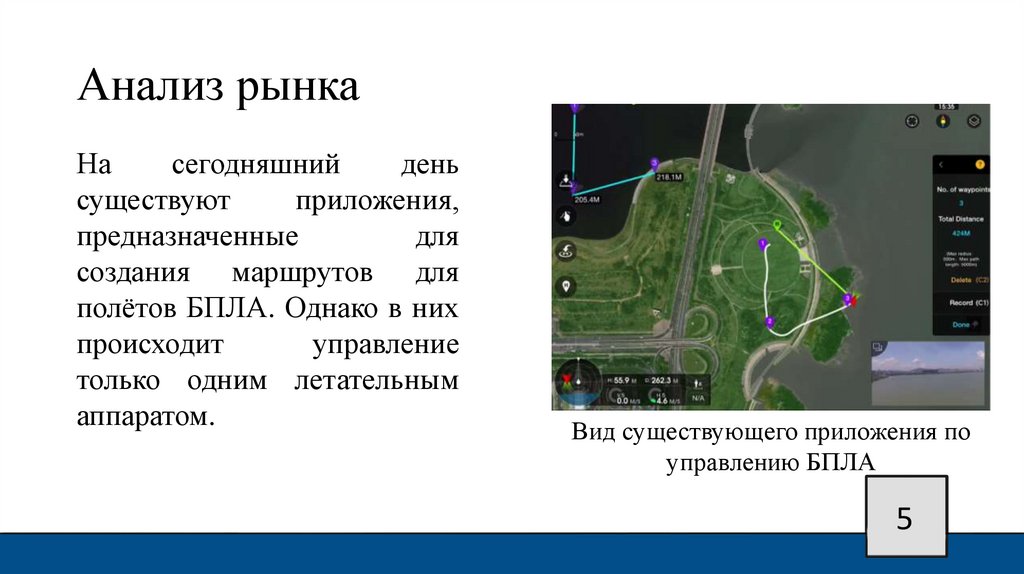
Анализ рынкаНа
сегодняшний
день
существуют
приложения,
предназначенные
для
создания маршрутов для
полётов БПЛА. Однако в них
происходит
управление
только одним летательным
аппаратом.
Вид существующего приложения по
управлению БПЛА
5
7.
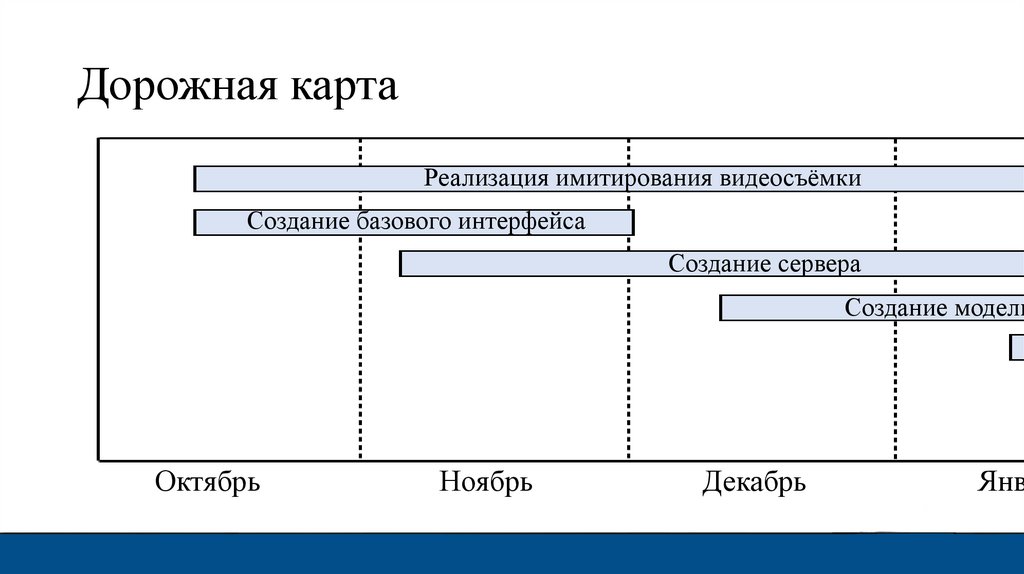
Дорожная картаРеализация имитирования видеосъёмки
Создание базового интерфейса
Создание сервера
Создание модели
Октябрь
Ноябрь
Декабрь
Янв
8.
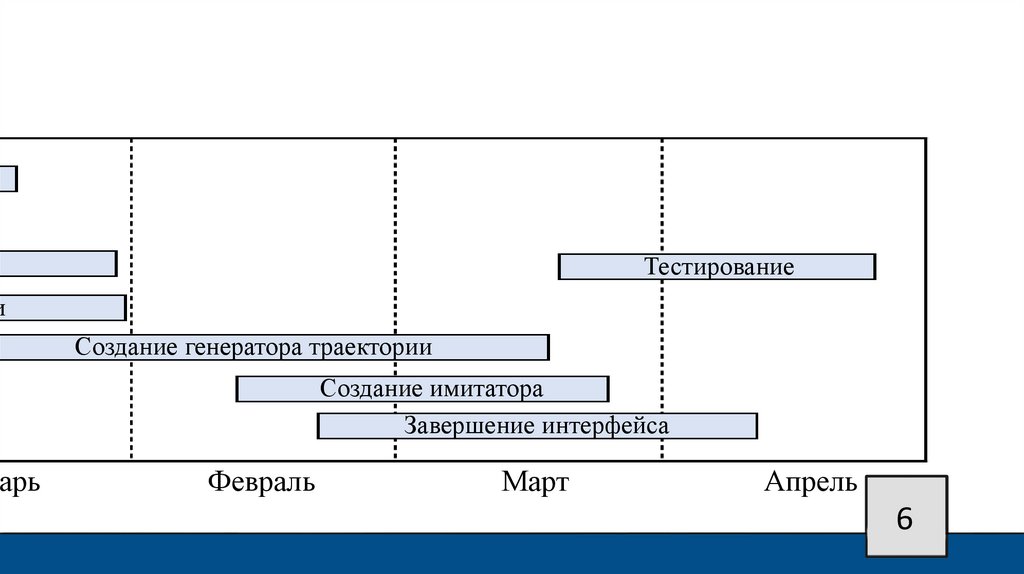
Тестированиеи
варь
Создание генератора траектории
Создание имитатора
Завершение интерфейса
Февраль
Март
Апрель
6
9.
Состав командыВ состав нашей команды входит 2
человека, которые являются студентами
БГТУ “Военмех” им. Устинова:
- Гордеев Владислав Дмитриевич,
- Чугунов Данила Владимирович.
7
10.
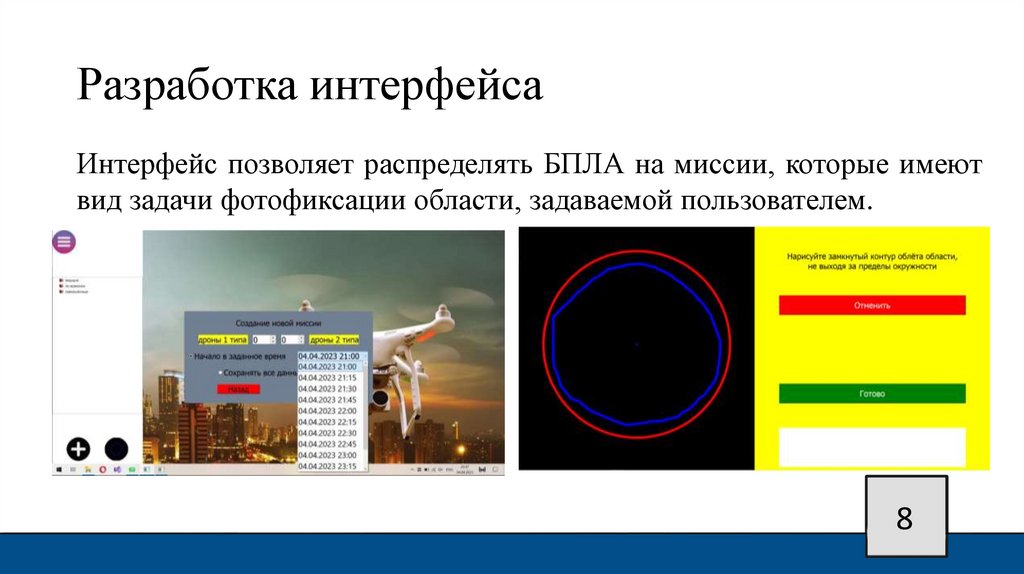
Разработка интерфейсаИнтерфейс позволяет распределять БПЛА на миссии, которые имеют
вид задачи фотофиксации области, задаваемой пользователем.
8
11.
Разработка интерфейсаТакже возможен отложенный запуск миссии. После запуска миссии
положение БПЛА будет показываться на карте.
9
12.
Разработка интерфейса10
13.
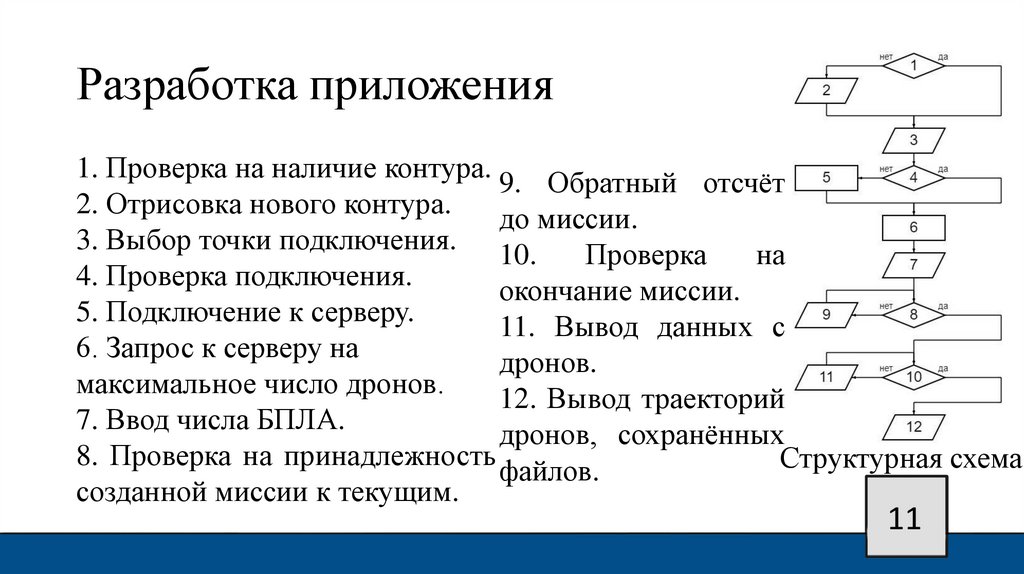
Разработка приложения1. Проверка на наличие контура.
9. Обратный отсчёт
2. Отрисовка нового контура.
до миссии.
3. Выбор точки подключения.
10.
Проверка
на
4. Проверка подключения.
окончание миссии.
5. Подключение к серверу.
11. Вывод данных с
6. Запрос к серверу на
дронов.
максимальное число дронов.
12. Вывод траекторий
7. Ввод числа БПЛА.
дронов, сохранённых
8. Проверка на принадлежность
Структурная схема
файлов.
созданной миссии к текущим.
11
14.
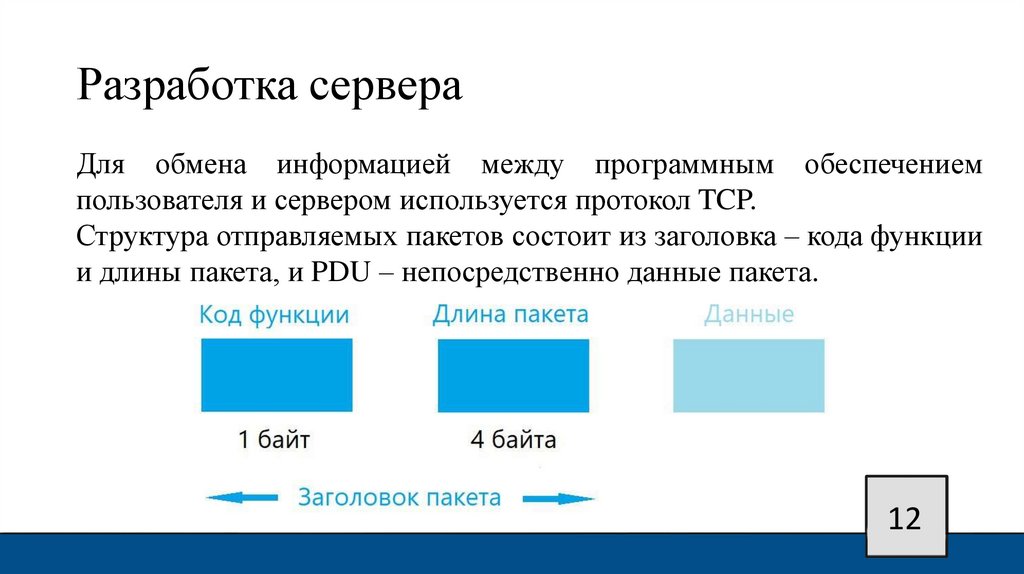
Разработка сервераДля обмена информацией между программным обеспечением
пользователя и сервером используется протокол TCP.
Структура отправляемых пакетов состоит из заголовка – кода функции
и длины пакета, и PDU – непосредственно данные пакета.
12
15.
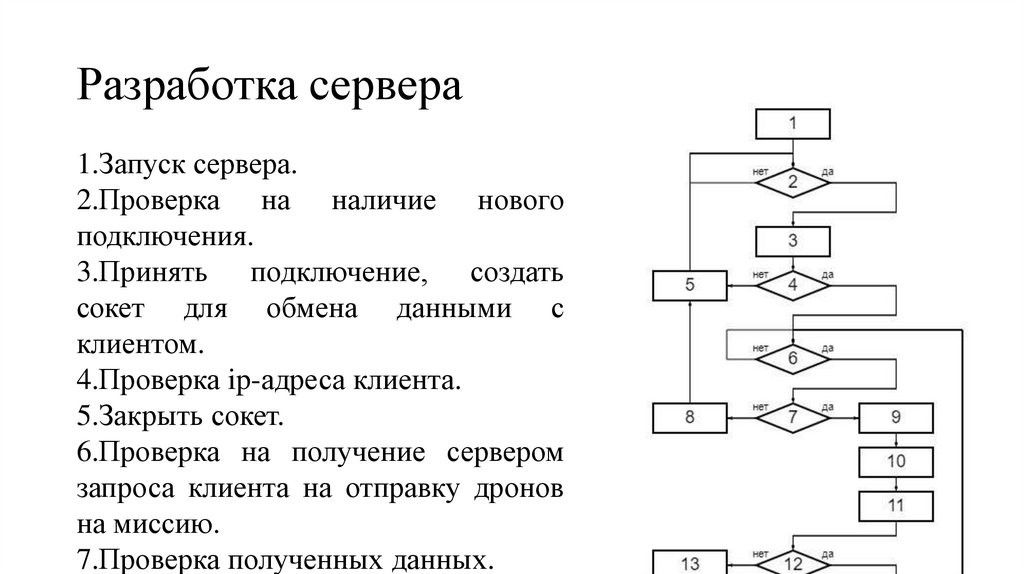
Разработка сервера1.Запуск сервера.
2.Проверка на наличие нового
подключения.
3.Принять подключение, создать
сокет для обмена данными с
клиентом.
4.Проверка ip-адреса клиента.
5.Закрыть сокет.
6.Проверка на получение сервером
запроса клиента на отправку дронов
на миссию.
7.Проверка полученных данных.
16.
8.Заблокировать ip-адрес.9.Отправка свободных дронов.
10.Приём данных о создании миссии.
11.Создание новой миссии, расчёт
траекторий для дронов.
12.Проверка
на
принадлежность
миссии текущим.
Структурная схема
13.Получение сигнала о начале отложенной миссии.
14.Проверка на активность таймера.
15.Запуск таймера.
16.Проверка на окончание миссии.
17.Расчёт по сигналу таймера состояния дронов, отправка данных с
них.
18.Проверка на отсутствие других миссий.
19.Остановка таймера.
13
17.
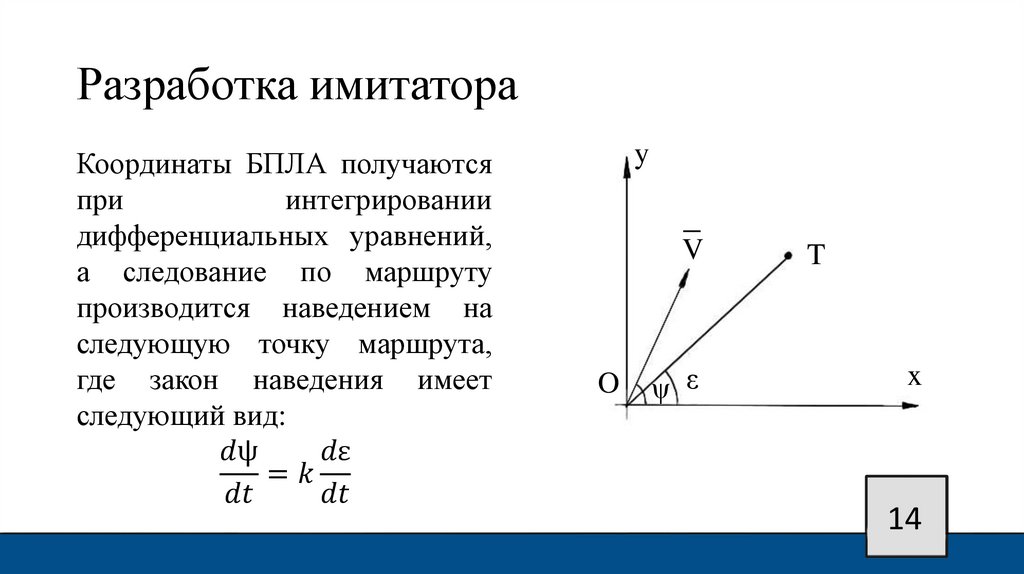
Разработка имитатораКоординаты БПЛА получаются
при
интегрировании
дифференциальных уравнений,
а следование по маршруту
производится наведением на
следующую точку маршрута,
где закон наведения имеет
следующий вид: