












 Механика
Механика Электроника
ЭлектроникаПохожие презентации:









")
Конструирование интеллектуального робота - уборщика на основе мехатронного подхода
1.
МИНОБРНАУКИ РОССИИфедеральное государственное бюджетное образовательное учреждение высшего образования
Московский государственный технологический университет «СТАНКИН»
(ФГБОУ ВО МГТУ «СТАНКИН»)
Институт цифровых интеллектуальных систем
Кафедра: « Мехатроника и робототехника»
Выпускная квалификационная работа по направлению
15.03.06 «Мехатроника и робототехника»
на тему:
« Конструирование интеллектуального робота-уборщика на основе мехатронного подхода»
Выполнил студент группы АДБ 17-09: Кайда Андрей Сергеевич
Научный руководитель: Карлов Кирилл Рудольфович
Москва 2021
2.
Цели и задачи работыЦель исследования: разработка конструкции мобильного робота-уборщика на
основе мехатронного подхода.
Задачи исследования:
Задача №1. Обзор основных сведений о мобильной робототехнике, обзор
актуальных наземных мобильных роботов-уборщиков.
Задача №2. Выбор приводного механизма ходовой части робота.
Задача №3. Выбор механических компонентов дифференциальной системы
привода.
Задача №4. Подбор электронных компонентов и источника питания робота.
Задача №5. Разработка и создание общей 3D-модели мобильного робота-уборщика.
2
3.
Примеры мобильных роботов уборщиков.Робот-уборщик VeDroid разработанный
отечественными разработчиками
Серийный робот-пылесос компании Xiaomi
3
4.
Список технических требований, предъявляемых кпроектируемому устройству:
• Робот должен иметь всасывающее устройство и отсек для сбора мусора;
• Робот должен иметь устройство для подъема щеток.
• Система электропитания 12В
• Робот должен перевозить груз массой до 5 кг;
• Скорость передвижения должна быть до 0,6 м/с;
• Дорожный просвет робота должен быть не менее 4 см;
• Робот должен непрерывно работать в течение 1.5 ч;
• Робот должен иметь набор датчиков для ориентации в пространстве.
• Робот должен быть недорогим;
4
5.
Кинематические модели колесных мобильных роботовАвтомобильная система привода.
Синхронная система привода.
Дифференциальная система привода.
5
6.
Выбор компонентов приводаХарактеристики двигателя:
• Напряжение: 12V
• Крутящий момент: 4.9Нм
• Максимальный ток : 8.7 А
• Частота вращения вала: 100 об/мин
Двигатель TETRIX MAX TorqueNADO
Характеристики драйвера:
• Максимальное напряжение: 16В (до 40В в
пиках);
• Максимальный ток: 14А (пиковый до 30А);
Двухканальный драйвер VNH2SP30
6
7.
Подбор компонентов приводов щеток.Характеристики двигателя
JDA25-370:
Напряжение: 12V.
Скорость: 399об/мин.
Крутящий момент: 3.2кг/см
Потребляемый ток: 1.2A.
Характеристики драйвера L298N:
Напряжение питания логики: 5V;
Напряжение питания моторов: от 5V до 35V;
Рабочий ток драйвера: 2 А;
Характеристики шагового двигателя Nema17 42HS4023:
Напряжение: 12 В.
Номинальный ток: 0.6 А
Момент удержания 0,14 Н*м
Характеристики драйвера шагового двигателя DRV8825:
Напряжение питания двигателя: 8,2 ... 45 В.
Максимальный ток на одну обмотку двигателя: 1,5А без радиатора, 2,2А с радиатором.
Напряжение питания логической части драйвера: 2,5 ... 5,25 В.
7
8.
Электрическая структурная схема аппаратных составляющих робота.8
9.
Симуляция работы энкодера и двигателей для щеток.9
10.
Электрическая функциональная схема.10
11.
Разработка источника питания робота.Схема подключения платы BMS к аккумулятору.
Li-pol аккумулятор 18650.
11
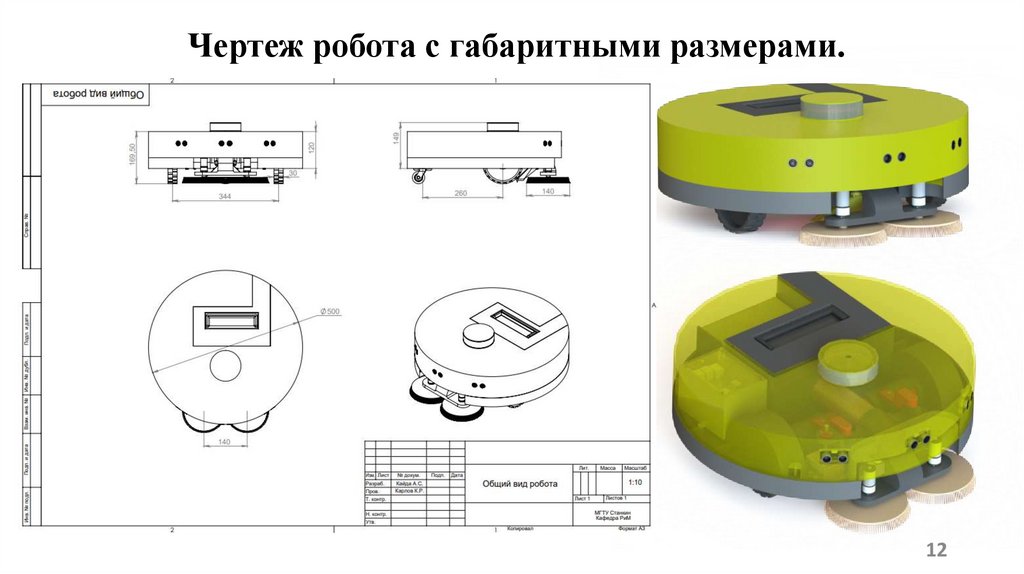
12.
Чертеж робота с габаритными размерами.12
13.
Технические характеристики разработанного роботаХарактеристики робота
Система электропитания
12 Вольт
Вес (при полной загрузке)
15 кг
Габариты
53х50х20см
Ширина щеток
28см
Время работы
1.5 часа
Емкость аккумулятора
20Ач
Максимальная скорость
0.6 м/c
Дорожный просвет робота
5см
Ход линейного
3см
перемещения щеток
Частота вращения щеток
399об/мин
13
14.
ЗаключениеВ ходе выполнения работы я решил следующие задачи:
• Провел обзор основных сведений о мобильной робототехнике, и актуальных наземных
мобильных роботов-уборщиков.
• Выбрал приводной механизм и механические компоненты дифференциальной системы
привода.
• Разработал электронную схему системы.
• Разработал источник питания робота.
• Разработал и создал общую 3D-модель мобильного робота-уборщика.
14