

 Промышленность
ПромышленностьПохожие презентации:










Разработка системы позиционного детектора излучения рабочей станции «СКИФ»
1.
Разработка системыпозиционного
детектора
излучения рабочей
станции «СКИФ»
Новосибирский государственный
технический университет НЭТИ
Негадов
Андрей Витальевич
Бакалавр очной формы обучения НГТУ
Направление: 27.03.04 - Управление в
технических системах
Научный руководитель:
Юркевич Валерий Дмитриевич,
д.т.н., профессор
2.
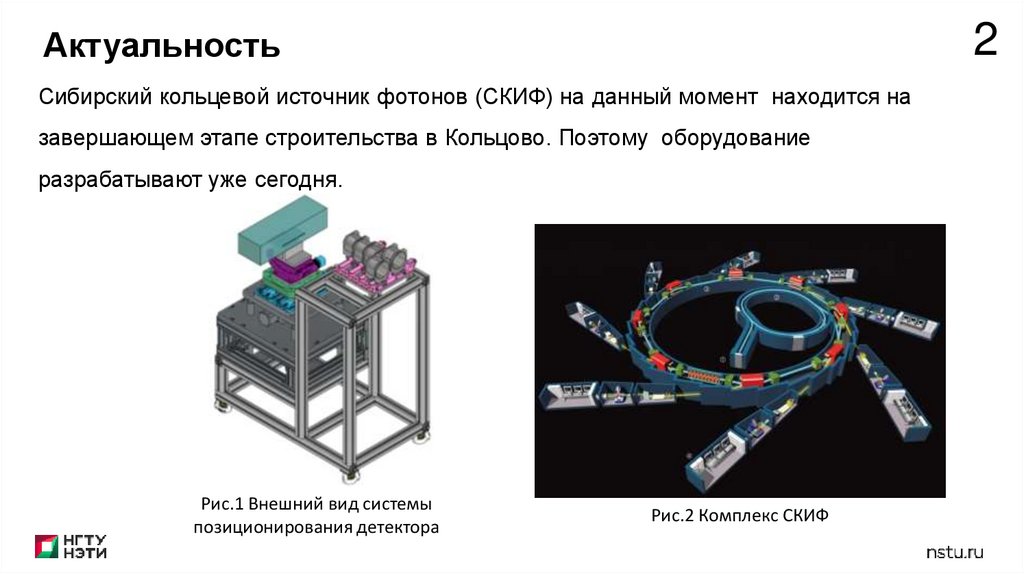
2Актуальность
Сибирский кольцевой источник фотонов (СКИФ) на данный момент находится на
завершающем этапе строительства в Кольцово. Поэтому оборудование
разрабатывают уже сегодня.
Рис.1 Внешний вид системы
позиционирования детектора
Рис.2 Комплекс СКИФ
3.
Цель и задачи работы3
Необходимо построить модель системы позиционирования детектора для рабочей
станции СКИФ в MATLAB.
Задачами данной работы являются:
Построение модели подвижек системы позиционирования детектора
в MATLAB Simulink
Реализовать в модели управление положением ротора электродвигателя
Исследование влияния дробления шага на плавность хода шагового двигателя (ШД)
4.
4Система позиционирования детектора
Система позиционирования детектора предназначена для точной юстировки
детектора относительно пучка синхротронного излучения (СИ).
Детектор
Детектор
Гониометрическая стойка
Поворотный стол
Горизонтальная подвижка
Пучок СИ
Вертикальная подвижка
Рис.3 Принцип работы системы
позиционирования детектора
Рис.4 Габаритный чертеж
5.
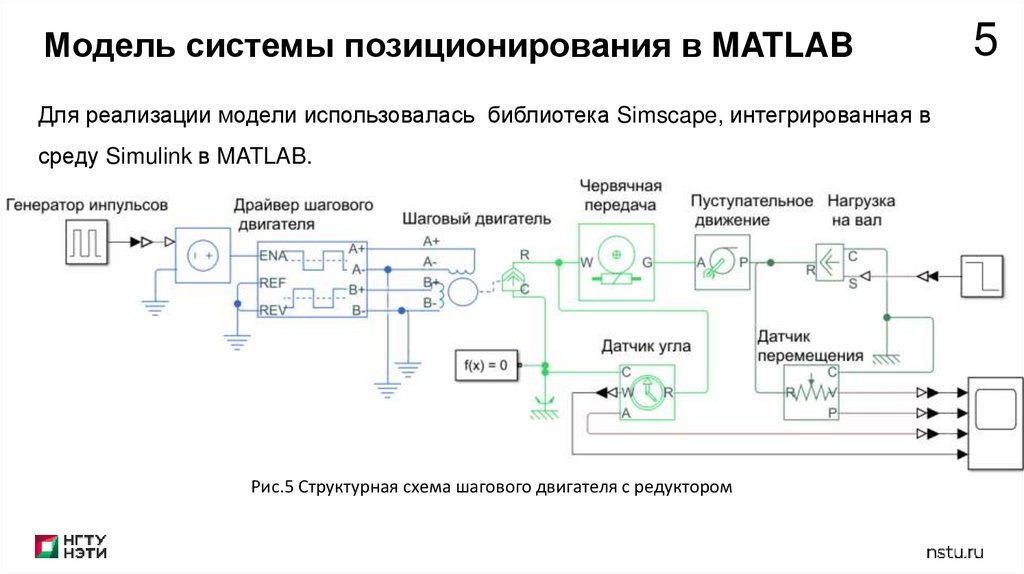
Модель системы позиционирования в MATLABДля реализации модели использовалась библиотека Simscape, интегрированная в
среду Simulink в MATLAB.
Рис.5 Структурная схема шагового двигателя с редуктором
5
6.
Параметры электродвигателей, используемые всистеме позиционирования
На рисунке 7 представлены технические характеристики NEMA 34 и NEMA 23,
которые в дальнейшем будут использованы для настройки модели
Рис.6 Внешний вид двигателей
NEMA 34 и NEMA 23
Рис.7 Технические характеристики ШД
6
7.
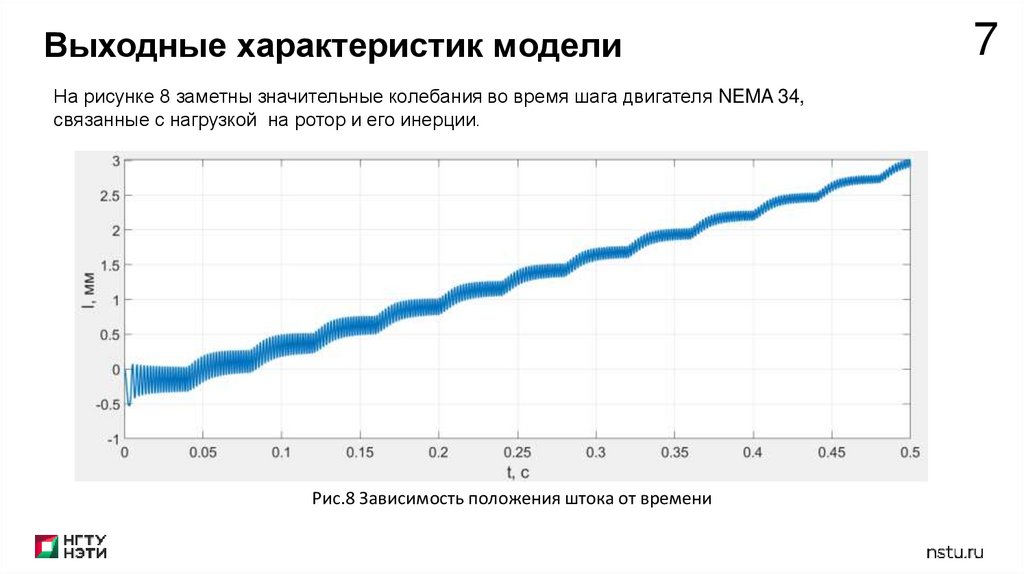
Выходные характеристик моделиНа рисунке 8 заметны значительные колебания во время шага двигателя NEMA 34,
связанные с нагрузкой на ротор и его инерции.
Рис.8 Зависимость положения штока от времени
7
8.
Управление положением ротора электропривода8
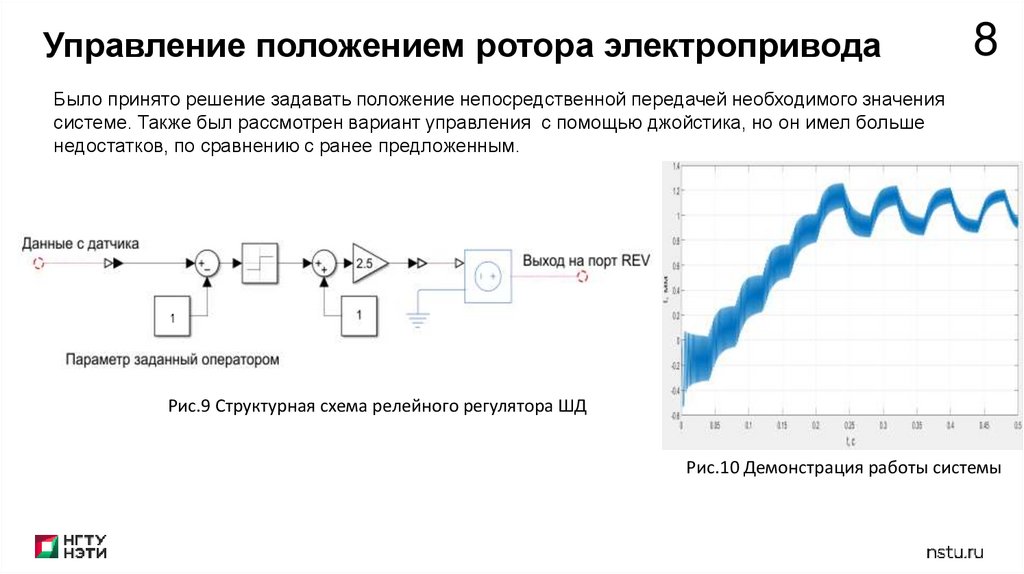
Было принято решение задавать положение непосредственной передачей необходимого значения
системе. Также был рассмотрен вариант управления с помощью джойстика, но он имел больше
недостатков, по сравнению с ранее предложенным.
Рис.9 Структурная схема релейного регулятора ШД
Рис.10 Демонстрация работы системы
9.
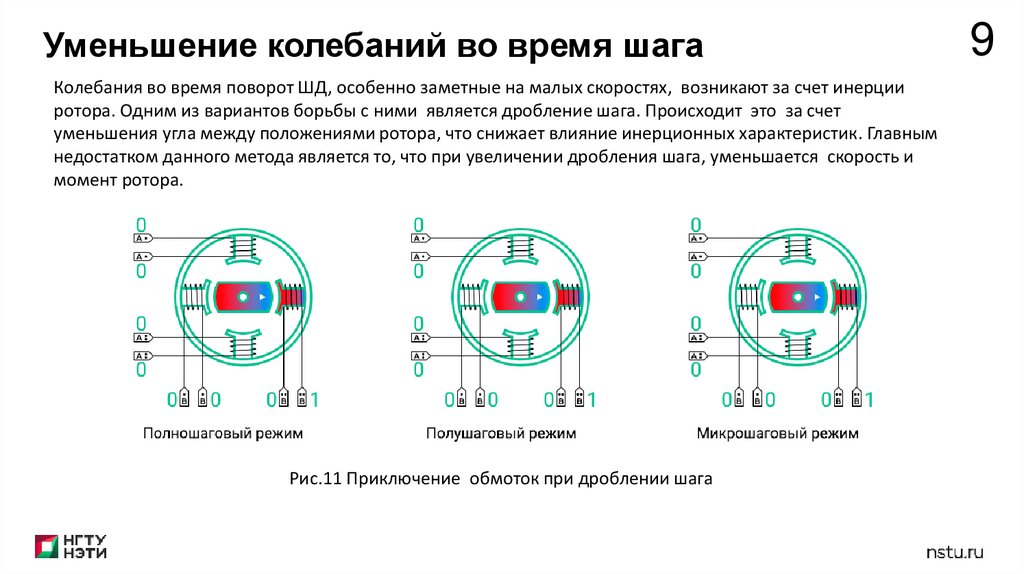
Уменьшение колебаний во время шагаКолебания во время поворот ШД, особенно заметные на малых скоростях, возникают за счет инерции
ротора. Одним из вариантов борьбы с ними является дробление шага. Происходит это за счет
уменьшения угла между положениями ротора, что снижает влияние инерционных характеристик. Главным
недостатком данного метода является то, что при увеличении дробления шага, уменьшается скорость и
момент ротора.
Рис.11 Приключение обмоток при дроблении шага
9
10.
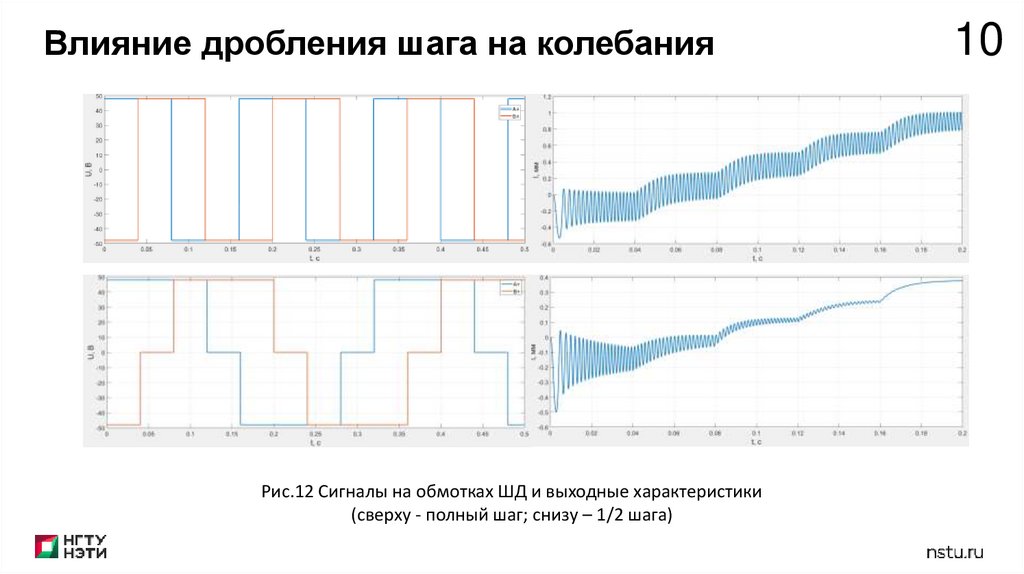
Влияние дробления шага на колебанияРис.12 Сигналы на обмотках ШД и выходные характеристики
(сверху - полный шаг; снизу – 1/2 шага)
10
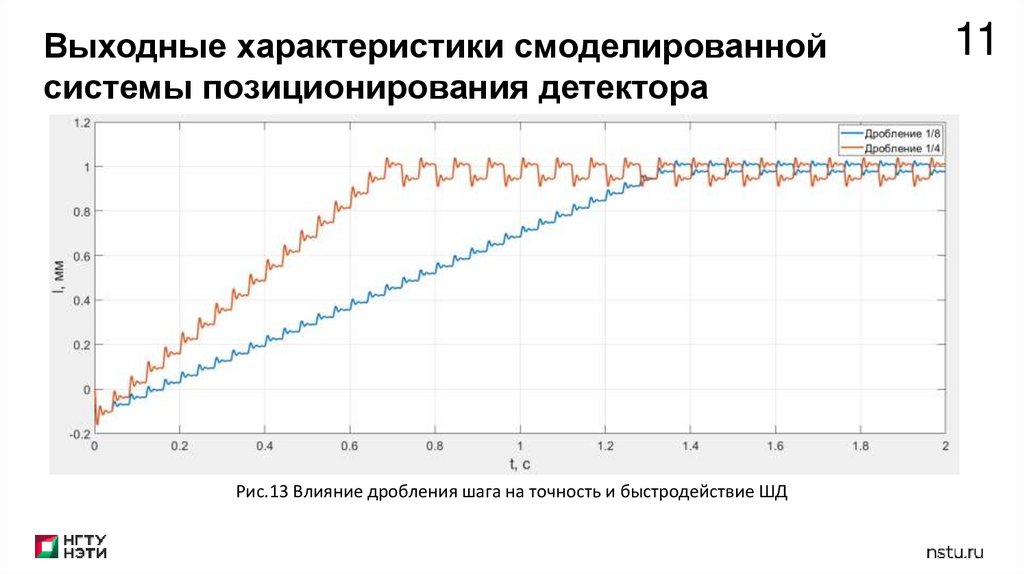
11.
Выходные характеристики смоделированнойсистемы позиционирования детектора
Рис.13 Влияние дробления шага на точность и быстродействие ШД
11
12.
Заключение12
В данной работе решены следующие задачи:
Создана модель системы позиционирования детектора с помощью MATLAB Simulink
Рассмотрен и смоделирован релейный метод управления положением ротора ШД
Исследовано влияние дробления шага на выходные характеристики системы
позиционирования детектора
В дальнейшем планируется развивать данную работу: разработать регулятор для
выхода драйвера ШД, с целью добиться еще более лучших выходных характеристик;
использовать полученную модель системы позиционирования детектора на реальном
объекте.
13.
Разработка системыпозиционного
детектора
излучения рабочей
станции «СКИФ»
Новосибирский государственный
технический университет НЭТИ
Негадов
Андрей Витальевич
Бакалавр очной формы обучения НГТУ
Направление: 27.03.04 - Управление в
технических системах
Научный руководитель:
Юркевич Валерий Дмитриевич,
д.т.н., профессор