

 Информатика
Информатика Электроника
ЭлектроникаПохожие презентации:

")




")



Разработка автоматизированной системы контроля дросселя электродвигателя и тормозного усилия на ведущем колесе электромотоцикла
1.
Московский политехнический университетВыпускная квалификационная работа
Разработка автоматизированной
системы контроля дросселя
электродвигателя и тормозного
усилия на ведущем колесе
электромотоцикла
27.03.04 Управление в технических системах
Студент: Бурлаков Макар Владимирович
Группа 161-312
Руководитель: к.т.н., доцент Архипов Максим Викторович
2.
Цели и задачи ВКРЦель ВКР – увеличение энергоэффективности и безопасности
передвижения электромотоцикла за счёт контроля тягового
усилия мотора и общего тормозного усилия рекуперативного
торможения и гидравлических тормозов на ведущем колесе
Задачи:
- Исследование поведения мотоцикла в разных условиях
- Исследование тормозных характеристик электромотора Golden Motor HPM-10kW
- Разработка гидравлической схемы блока ограничения давления на поршне
гидравлических тормозов
- Оптимизация алгоритмов работы автоматизированной системы контроля дросселя
(АСКД)
- Оптимизация алгоритмов работы автоматизированной системы контроля тормозного
усилия (АСКТУ)
- Разработка электронных блоков управления АСКД и АСКТУ
3.
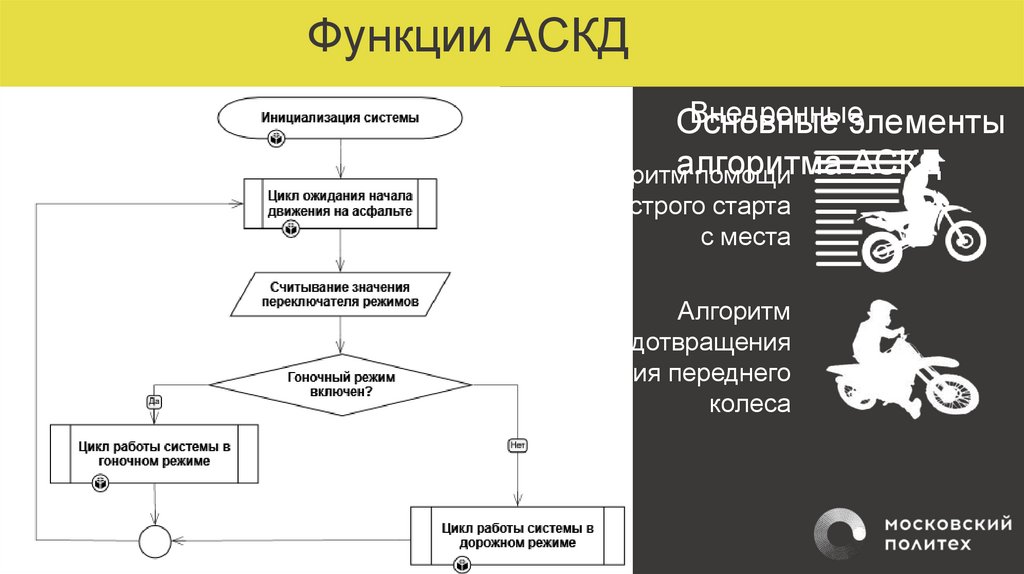
Функции АСКДТипичные
Предотвращение
пробуксовки
ведущего колеса
Предотвращение
вилли
мотоцикла
Предсказывание
пробуксовки
ведущего колеса при
прохождении поворота
Внедренные
Основные
элементы
АСКД
Алгоритмалгоритма
помощи
для быстрого старта
с места
Алгоритм
предотвращения
скольжения переднего
колеса
4.
Функции АСКТУТипичные черты Brake by wire
Оптимизация
мощности
рекуперативного
торможения
Регулирование
общего
тормозного
усилия
- Наличие симулятора обратной связи
- Наличие механизма, создающего
давление в тормозной системе
- Отсутствие прямой связи между педалью
тормоза и тормозной колодкой
Особенности спроектированной АСКТУ
- Отсутствие симулятора обратной связи
- Отсутствие устройства, создающего
давление в тормозной системе
- Имеется прямая связь между лапкой тормоза
и тормозным поршнем
5.
Датчики для АСКД• Датчики Холла для измерения скорости колес
• Акселерометр-гироскоп
• Датчик хода пружины
• Датчик положения ручки дросселя
• Датчик угла поворота руля
6.
Компоненты для АСКТУ• Датчики давления для первичной и вторичной гидролинии
• Датчик положения лапки тормоза
• Электромагнитный клапан
7.
Выбор микроконтроллеров для ЭБУобеих систем
Вычислительные
ядра систем
• STM32 – для блоков со
сложными алгоритмами
работы
• Atmel328p – для
вспомогательных блоков и
блоков с большим
количеством подключенных
к АЦП датчиков
Платы для отладки
алгоритмов работы
• Плата STM32F103C8T6
• Плата Arduino Nano с
чипом Atmel328p
8.
Потенциал систем- Передача данных о работе системы по CAN-шине
- Разработка антиблокировочной системы (АБС)
- Объединение АСКД и АБС в единую систему стабилизации
поведения мотоцикла
- Разработка системы стабилизации с нейронной сетью в
качестве вычислительного ядра
9.
Заключение- Исследовано поведение мотоцикла в разных условиях
- Исследованы тормозные характеристики применяемой
силовой установки
- Разработаны алгоритмы работы АСКД и АСКТУ
- Разработаны ЭБУ АСКД и АСКТУ
- Изучена научно-техническая литература и выведены
перспективные направления развития спроектированных
систем