






 Электроника
ЭлектроникаПохожие презентации:








")

Jiuhe GKS45 Aerial Lift Truck electric system Russian, Chinese , English contrast
1.
九合重工 GKS45 高空作业车电控系统俄中英对照JIUHE GKS45 AERIAL LIFT TRUCK electric system
Russian, Chinese , English contrast
2.
出厂设置出厂参数保存
恢复出厂参数
持续按住对应按钮3秒钟 出现相应的确认按钮时 按下
该确认按钮 提示对应的操作成功。
Factory settings:
Save the factory parameters:
Restore factory parameters:
Keep pressing the corresponding button for 3 seconds. When the
corresponding confirmation button appears, press the confirmation
button to prompt that the corresponding operation is successful.
Настройки
Сохранить
К заводским
Нажимайте соответствующую кнопку в течение 3 секунд, далее
кнопку подтверждения, чтобы завершить операцию.
3.
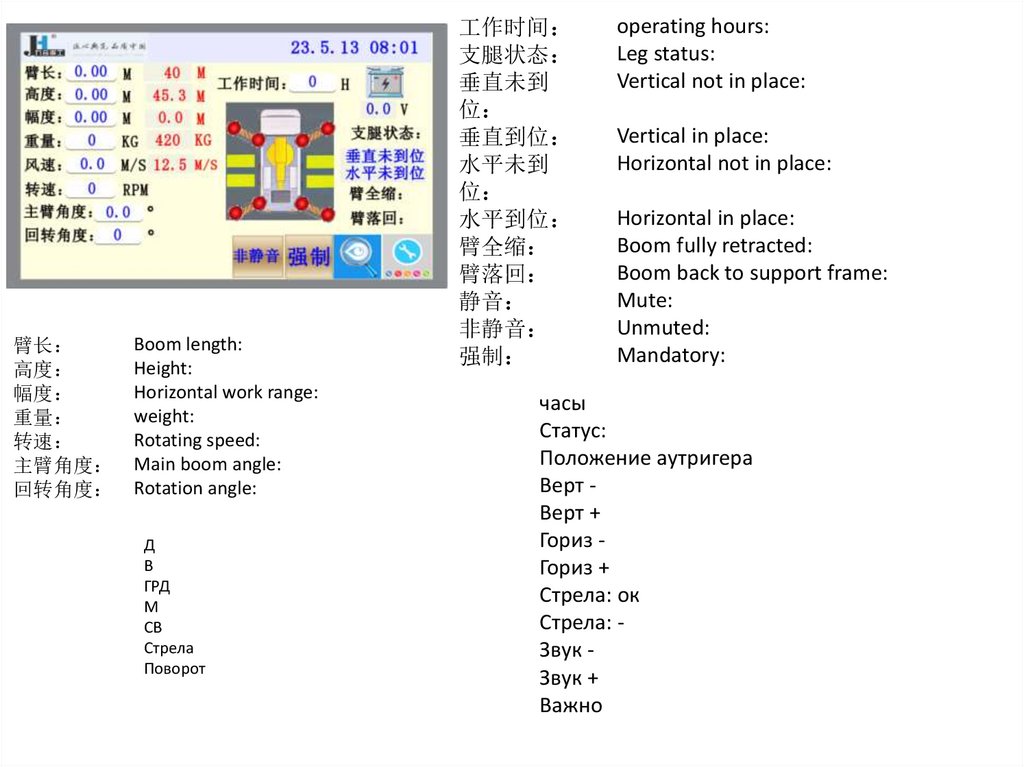
臂长高度
幅度
重量
转速
主臂角度
回转角度
Boom length:
Height:
Horizontal work range:
weight:
Rotating speed:
Main boom angle:
Rotation angle:
Д
В
ГРД
М
СВ
Cтрела
Поворот
工作时间
支腿状态
垂直未到
位
垂直到位
水平未到
位
水平到位
臂全缩
臂落回
静音
非静音
强制
operating hours:
Leg status:
Vertical not in place:
Vertical in place:
Horizontal not in place:
Horizontal in place:
Boom fully retracted:
Boom back to support frame:
Mute:
Unmuted:
Mandatory:
часы
Статус:
Положение аутригера
Верт Верт +
Гориз Гориз +
Стрела: ок
Стрела: Звук Звук +
Важно
4.
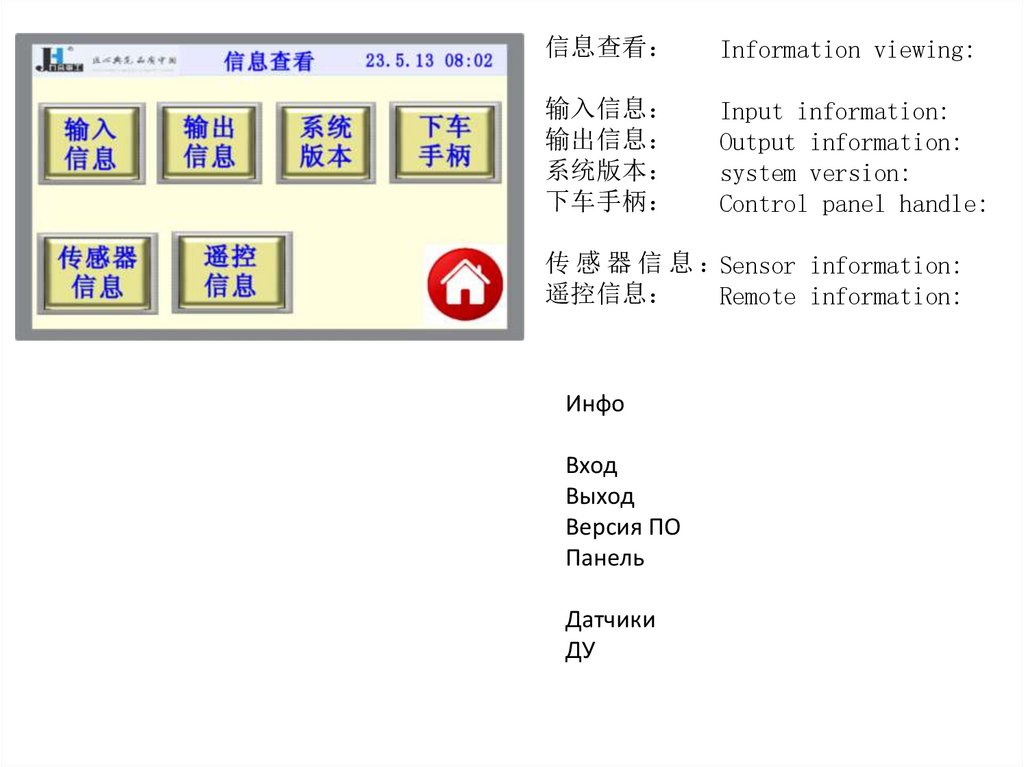
信息查看Information viewing:
输入信息
输出信息
系统版本
下车手柄
Input information:
Output information:
system version:
Control panel handle:
传 感 器 信 息 Sensor information:
遥控信息
Remote information:
Инфо
Вход
Выход
Версия ПО
Панель
Датчики
ДУ
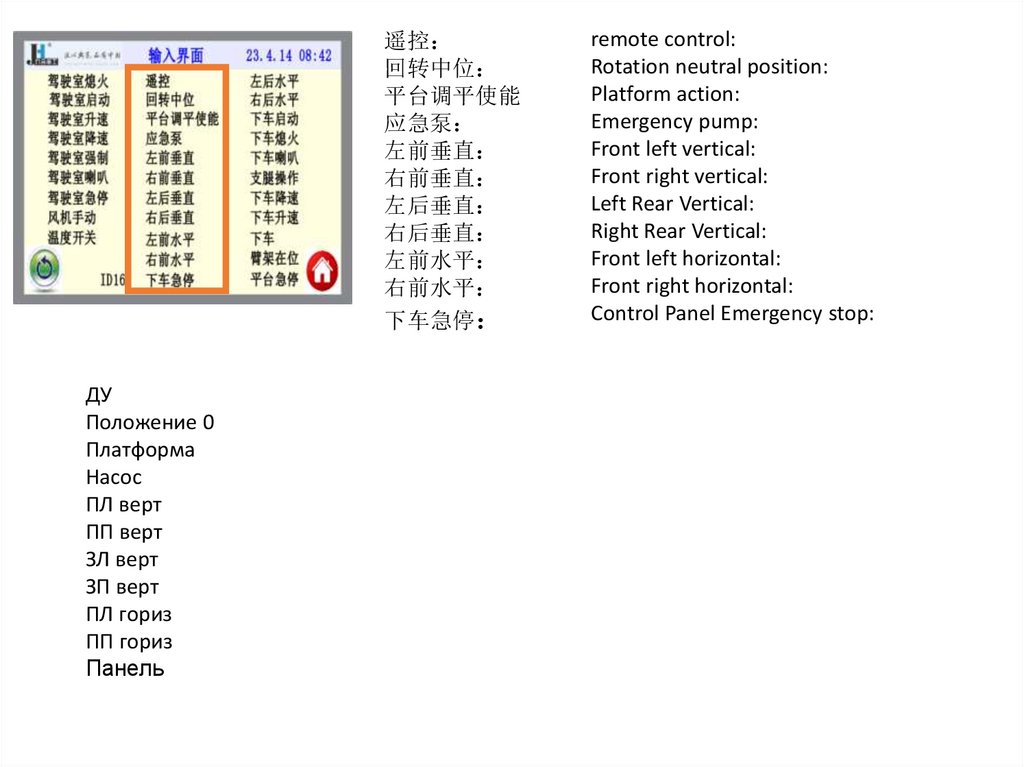
5.
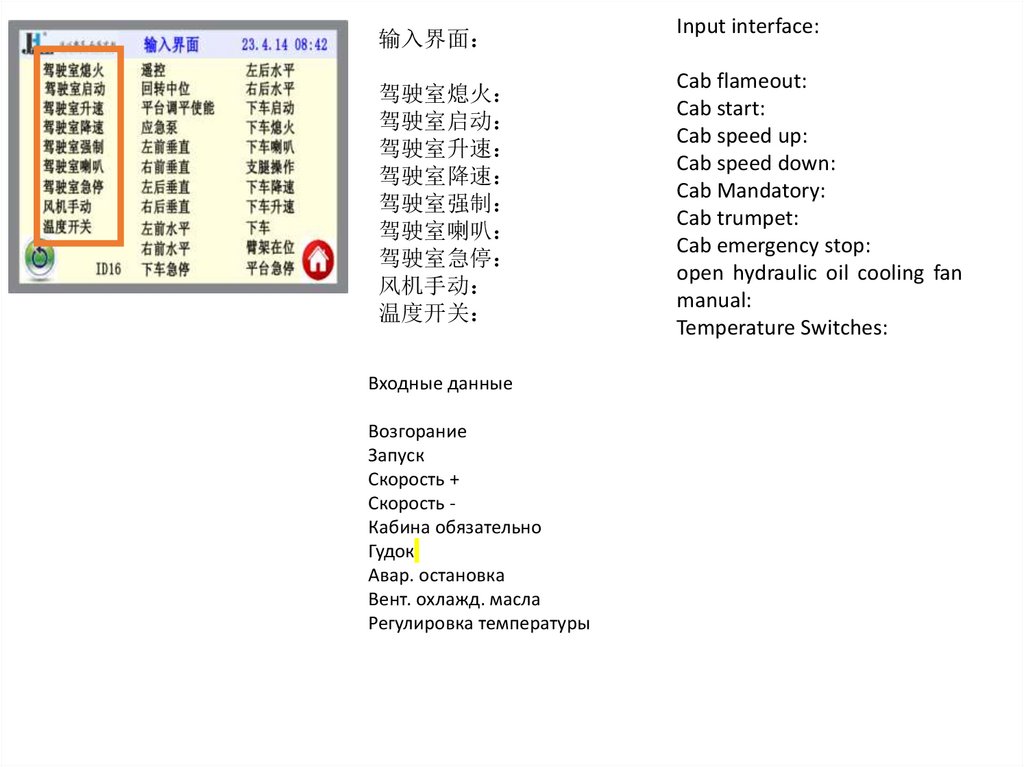
输入界面驾驶室熄火
驾驶室启动
驾驶室升速
驾驶室降速
驾驶室强制
驾驶室喇叭
驾驶室急停
风机手动
温度开关
Входные данные
Возгорание
Запуск
Скорость +
Скорость Кабина обязательно
Гудок
Авар. остановка
Вент. охлажд. масла
Регулировка температуры
Input interface:
Cab flameout:
Cab start:
Cab speed up:
Cab speed down:
Cab Mandatory:
Cab trumpet:
Cab emergency stop:
open hydraulic oil cooling fan
manual:
Temperature Switches:
6.
遥控回转中位
平台调平使能
应急泵
左前垂直
右前垂直
左后垂直
右后垂直
左前水平
右前水平
下车急停
ДУ
Положение 0
Платформа
Насос
ПЛ верт
ПП верт
ЗЛ верт
ЗП верт
ПЛ гориз
ПП гориз
Панель
remote control:
Rotation neutral position:
Platform action:
Emergency pump:
Front left vertical:
Front right vertical:
Left Rear Vertical:
Right Rear Vertical:
Front left horizontal:
Front right horizontal:
Control Panel Emergency stop:
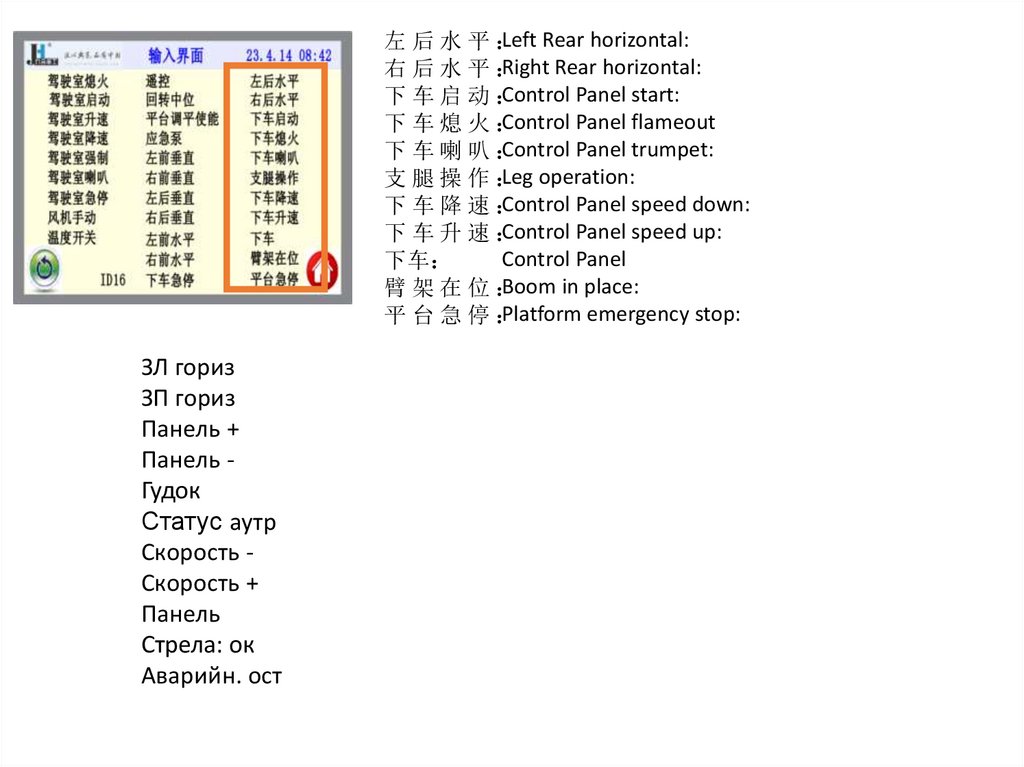
7.
Left Rear horizontal:左后水平
Right Rear horizontal:
右后水平
Control Panel start:
下车启动
Control Panel flameout
下车熄火
Control Panel trumpet:
下车喇叭
Leg operation:
支腿操作
Control Panel speed down:
下车降速
Control Panel speed up:
下车升速
Control Panel
下车
Boom in place:
臂架在位
Platform emergency stop:
平台急停
ЗЛ гориз
ЗП гориз
Панель +
Панель Гудок
Статус аутр
Скорость Скорость +
Панель
Стрела: ок
Аварийн. ост
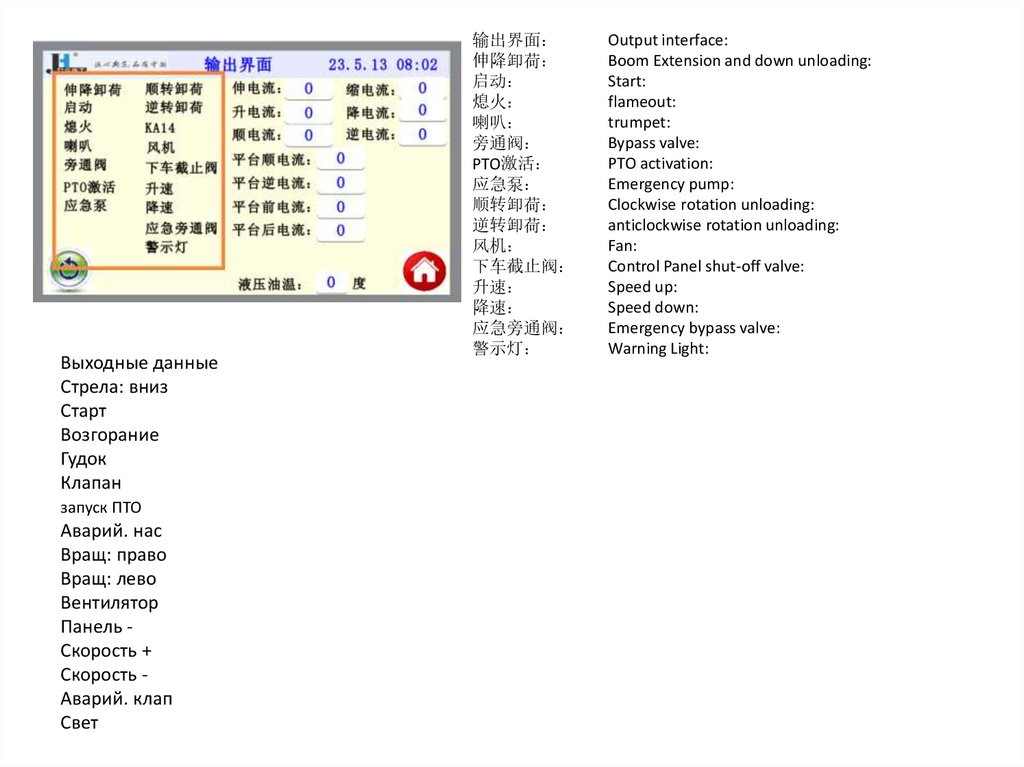
8.
Выходные данныеСтрела: вниз
Старт
Возгорание
Гудок
Клапан
запуск ПТО
Аварий. нас
Вращ: право
Вращ: лево
Вентилятор
Панель Скорость +
Скорость Аварий. клап
Свет
输出界面
伸降卸荷
启动
熄火
喇叭
旁通阀
PTO激活
应急泵
顺转卸荷
逆转卸荷
风机
下车截止阀
升速
降速
应急旁通阀
警示灯
Output interface:
Boom Extension and down unloading:
Start:
flameout:
trumpet:
Bypass valve:
PTO activation:
Emergency pump:
Clockwise rotation unloading:
anticlockwise rotation unloading:
Fan:
Control Panel shut-off valve:
Speed up:
Speed down:
Emergency bypass valve:
Warning Light:
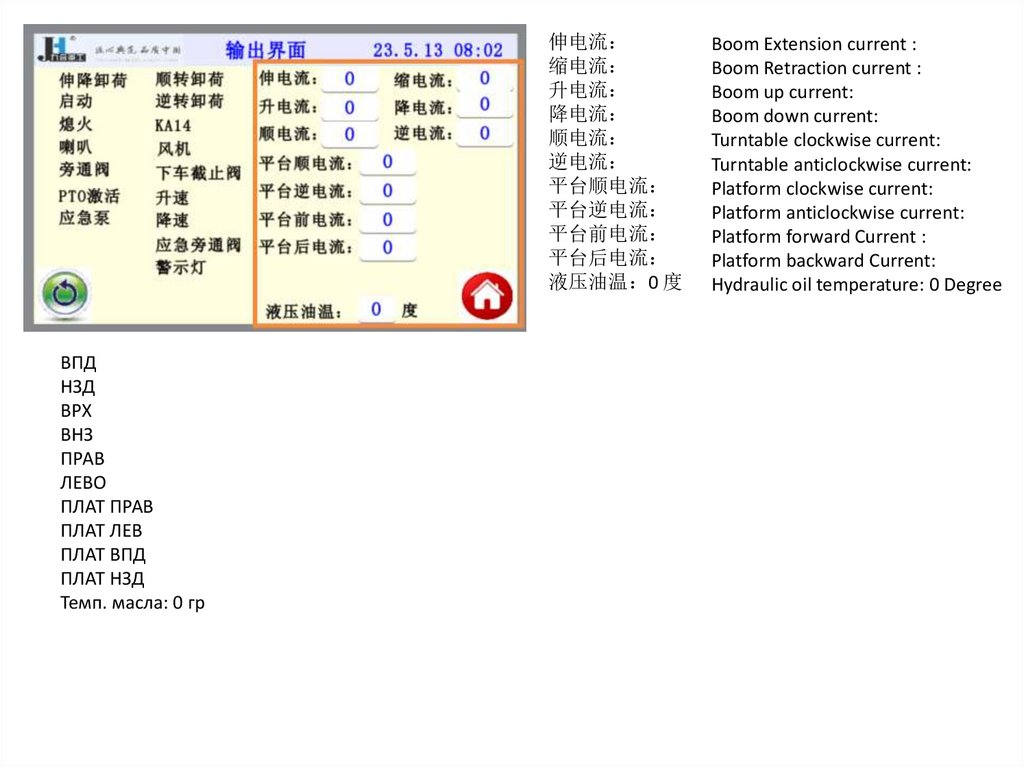
9.
伸电流缩电流
升电流
降电流
顺电流
逆电流
平台顺电流
平台逆电流
平台前电流
平台后电流
液压油温 0 度
ВПД
НЗД
ВРХ
ВНЗ
ПРАВ
ЛЕВО
ПЛАТ ПРАВ
ПЛАТ ЛЕВ
ПЛАТ ВПД
ПЛАТ НЗД
Темп. масла: 0 гр
Boom Extension current :
Boom Retraction current :
Boom up current:
Boom down current:
Turntable clockwise current:
Turntable anticlockwise current:
Platform clockwise current:
Platform anticlockwise current:
Platform forward Current :
Platform backward Current:
Hydraulic oil temperature: 0 Degree
10.
系统版本控制器程序版本
显示器程序版本
system version:
Controller program version:
Display program version:
Версия ПО
контроллер
программа
11.
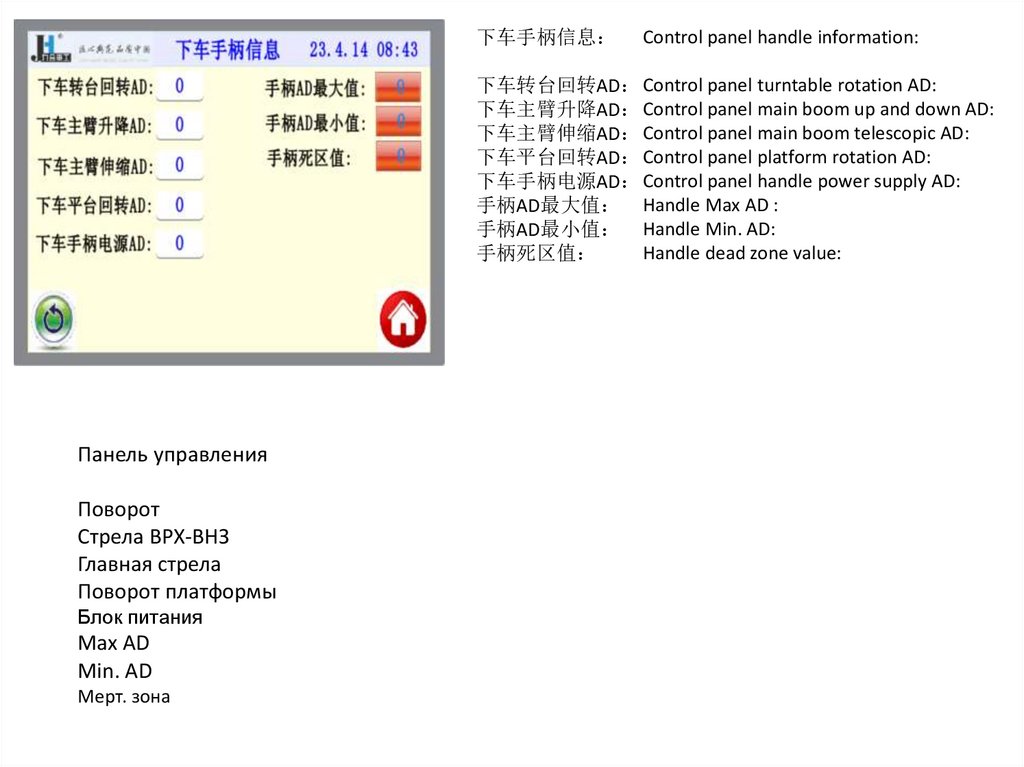
下车手柄信息Control panel handle information:
下车转台回转AD Control panel turntable rotation AD:
下车主臂升降AD Control panel main boom up and down AD:
下车主臂伸缩AD Control panel main boom telescopic AD:
下车平台回转AD Control panel platform rotation AD:
下车手柄电源AD Control panel handle power supply AD:
手柄AD最大值 Handle Max AD :
手柄AD最小值 Handle Min. AD:
Handle dead zone value:
手柄死区值
Панель управления
Поворот
Стрела ВРХ-ВНЗ
Главная стрела
Поворот платформы
Блок питания
Max AD
Min. AD
Мерт. зона
12.
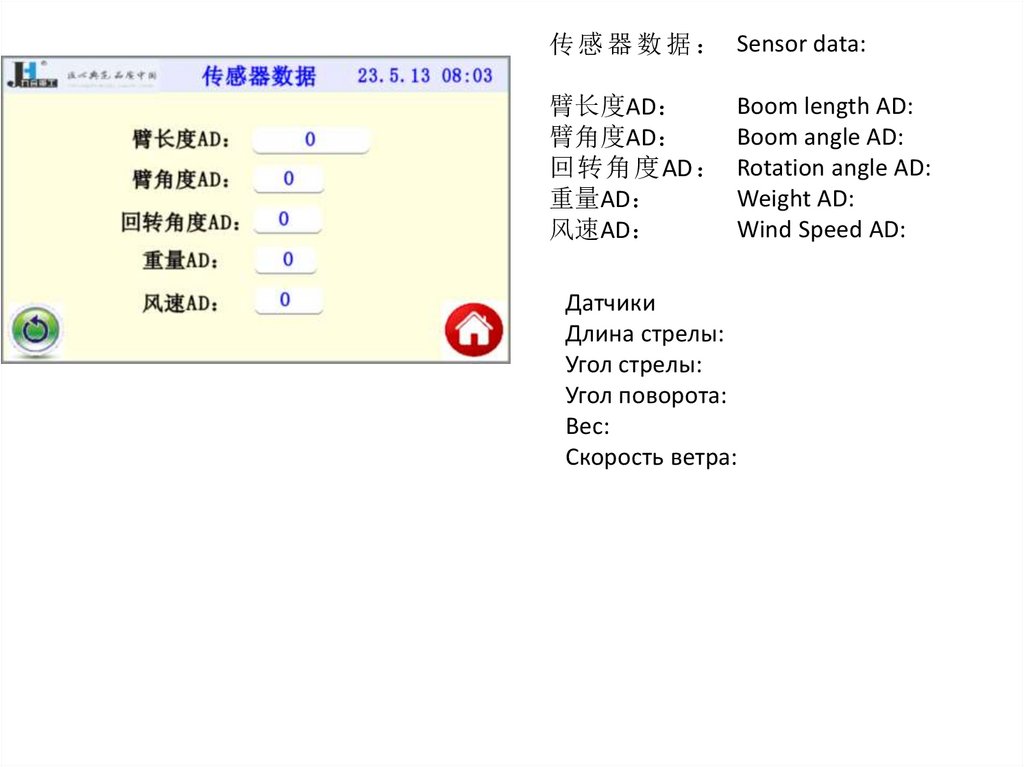
传 感 器 数 据 Sensor data:Boom length AD:
臂长度AD
Boom angle AD:
臂角度AD
回转角度AD Rotation angle AD:
Weight AD:
重量AD
Wind Speed AD:
风速AD
Датчики
Длина стрелы:
Угол стрелы:
Угол поворота:
Вес:
Скорость ветра:
13.
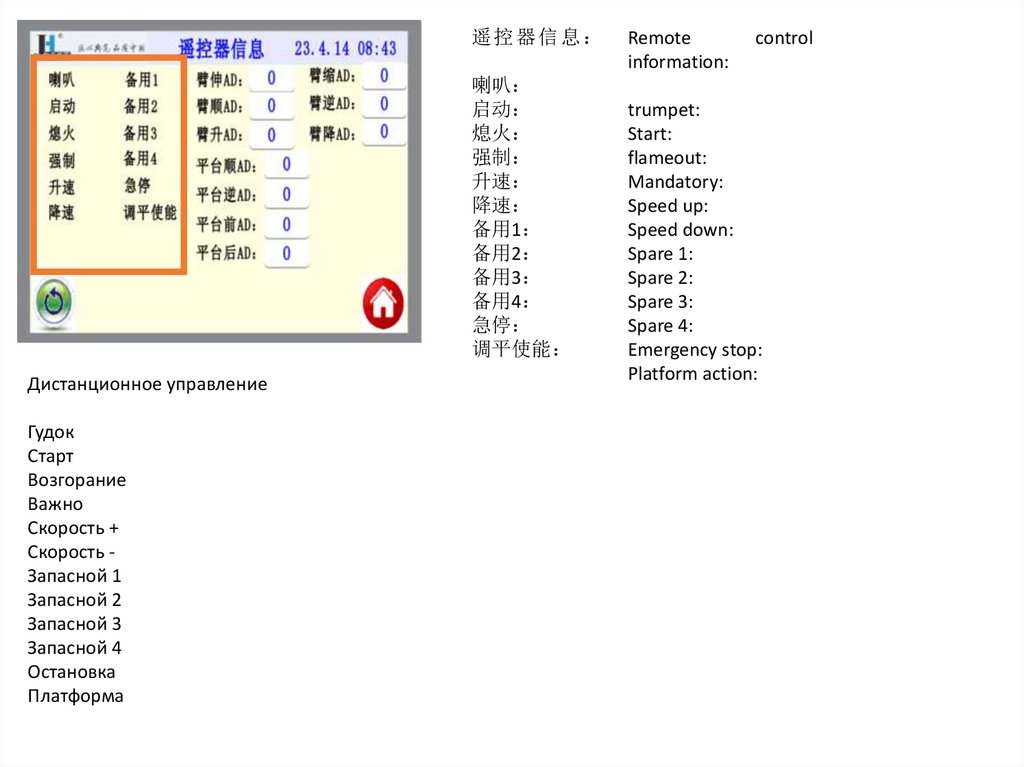
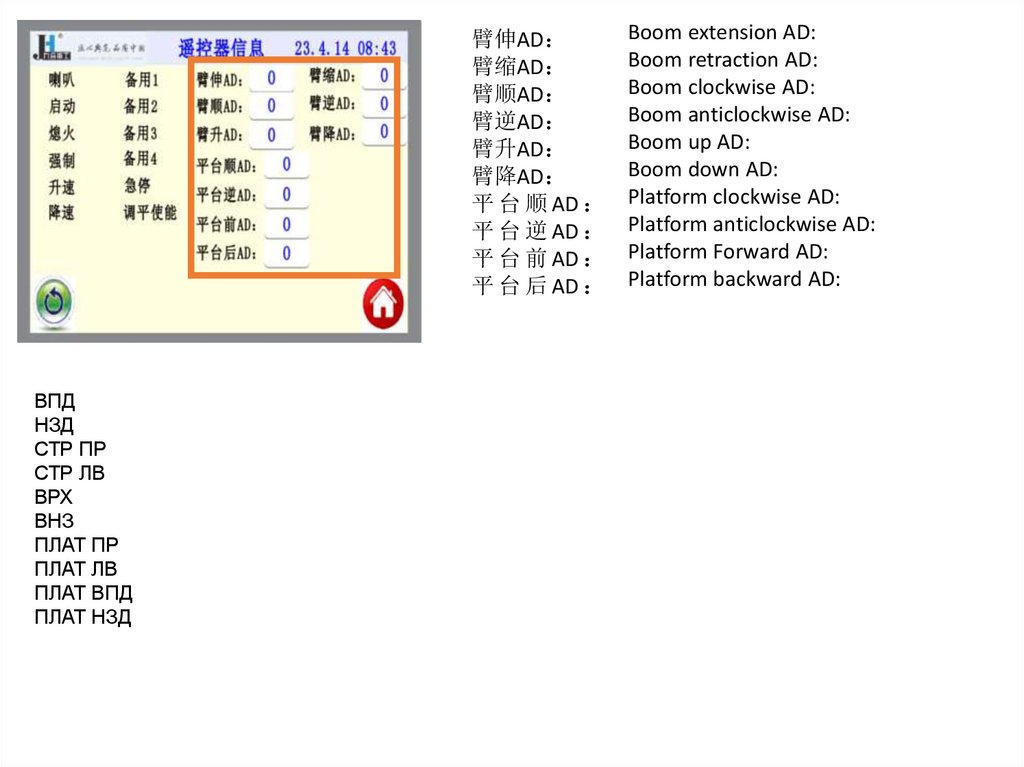
遥控器信息喇叭
启动
熄火
强制
升速
降速
备用1
备用2
备用3
备用4
急停
调平使能
Дистанционное управление
Гудок
Старт
Возгорание
Важно
Скорость +
Скорость Запасной 1
Запасной 2
Запасной 3
Запасной 4
Остановка
Платформа
Remote
information:
control
trumpet:
Start:
flameout:
Mandatory:
Speed up:
Speed down:
Spare 1:
Spare 2:
Spare 3:
Spare 4:
Emergency stop:
Platform action:
14.
臂伸AD臂缩AD
臂顺AD
臂逆AD
臂升AD
臂降AD
平 台 顺 AD
平 台 逆 AD
平 台 前 AD
平 台 后 AD
ВПД
НЗД
СТР ПР
СТР ЛВ
ВРХ
ВНЗ
ПЛАТ ПР
ПЛАТ ЛВ
ПЛАТ ВПД
ПЛАТ НЗД
Boom extension AD:
Boom retraction AD:
Boom clockwise AD:
Boom anticlockwise AD:
Boom up AD:
Boom down AD:
Platform clockwise AD:
Platform anticlockwise AD:
Platform Forward AD:
Platform backward AD:
15.
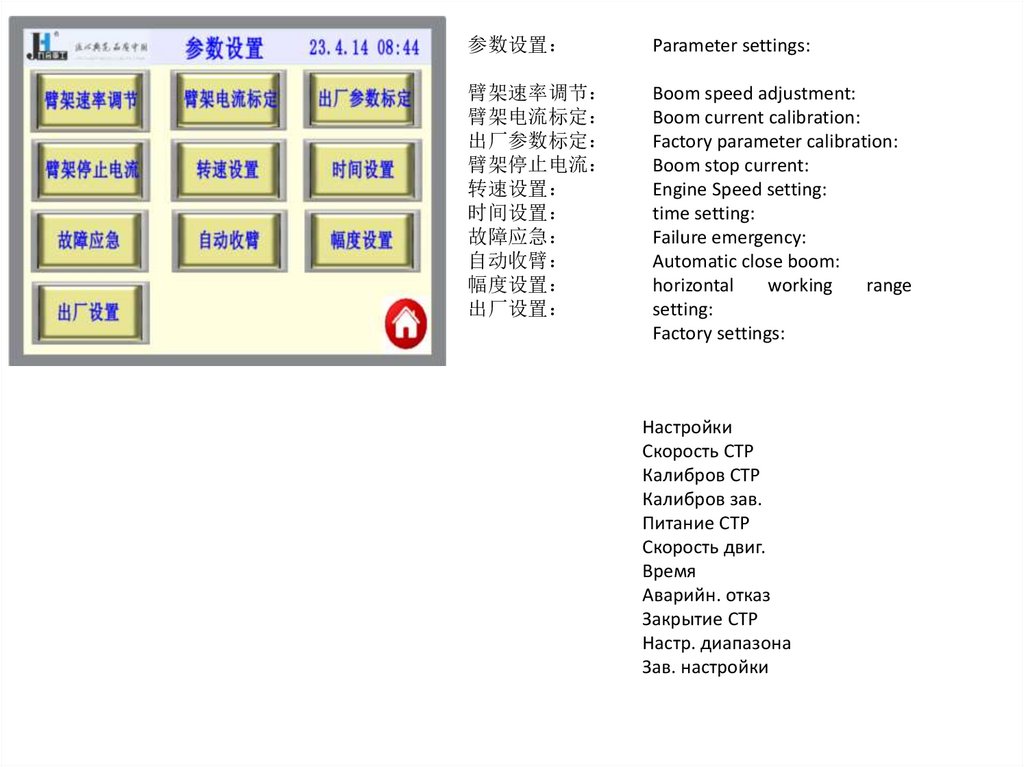
参数设置Parameter settings:
臂架速率调节
臂架电流标定
出厂参数标定
臂架停止电流
转速设置
时间设置
故障应急
自动收臂
幅度设置
出厂设置
Boom speed adjustment:
Boom current calibration:
Factory parameter calibration:
Boom stop current:
Engine Speed setting:
time setting:
Failure emergency:
Automatic close boom:
horizontal
working
range
setting:
Factory settings:
Настройки
Скорость СТР
Калибров СТР
Калибров зав.
Питание СТР
Скорость двиг.
Время
Аварийн. отказ
Закрытие СТР
Настр. диапазона
Зав. настройки
16.
Скорость СТРВПД +
ВПД НЗД +
НЗД –
ВРХ+
ВРХ –
ВНЗ +
ВНЗ ПРАВ +
ПРАВ ЛЕВ +
ЛЕВ –
ВПД t
НЗД t
ВРХ t
ВНЗ t
ПРАВ стр
ЛЕВ стр
臂 架 动 作 速 率 调 Boom Action speed adjustment:
节
2-cylinder extension acceleration rate:
2-cylinder extension deceleration rate:
2缸伸增速率
2-cylinder retraction acceleration rate:
2缸伸减速率
2-cylinder retraction deceleration rate:
2缸缩增速率
Boom up acceleration rate:
2缸缩减速率
Boom up deceleration rate:
臂升增速率
Boom down acceleration rate:
臂升减速率
Boom down deceleration rate:
臂降增速率
Boom clockwise acceleration rate:
臂降减速率
Boom clockwise deceleration rate:
臂顺增速率
Boom anticlockwise acceleration rate:
臂顺减速率
Boom anticlockwise deceleration rate:
臂逆增速率
Boom extension time base:
臂逆减速率
Boom retraction time base:
伸时间基数
Boom up time base:
缩时间基数
Boom down time base:
升时间基数
Boom clockwise time baser:
降时间基数
Boom anticlockwise time baser:
顺时间基数
逆时间基数
说明 数率数值越大 表示对应的臂架动作响应越快 反之越慢
Note: the larger on rate value, the faster on boom corresponding action, and
Примечание:
с повышением скорости, движение стрелы ускоряется
17.
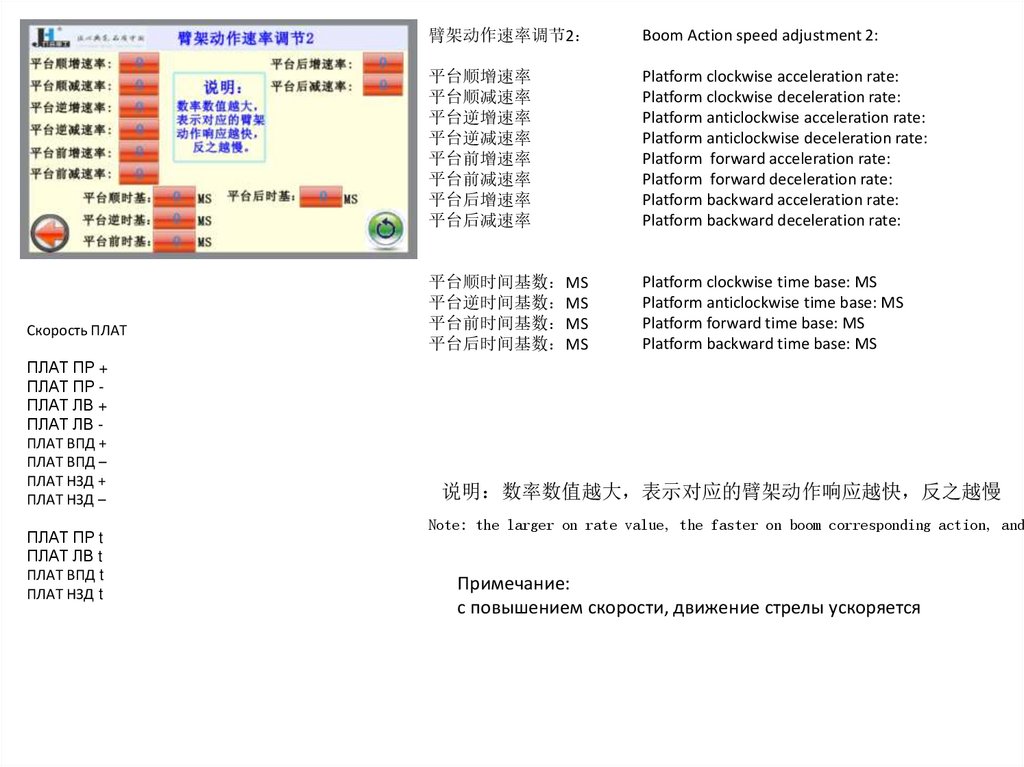
Скорость ПЛАТПЛАТ ПР +
ПЛАТ ПР ПЛАТ ЛВ +
ПЛАТ ЛВ ПЛАТ ВПД +
ПЛАТ ВПД –
ПЛАТ НЗД +
ПЛАТ НЗД –
ПЛАТ ПР t
ПЛАТ ЛВ t
ПЛАТ ВПД t
ПЛАТ НЗД t
臂架动作速率调节2
Boom Action speed adjustment 2:
平台顺增速率
平台顺减速率
平台逆增速率
平台逆减速率
平台前增速率
平台前减速率
平台后增速率
平台后减速率
Platform clockwise acceleration rate:
Platform clockwise deceleration rate:
Platform anticlockwise acceleration rate:
Platform anticlockwise deceleration rate:
Platform forward acceleration rate:
Platform forward deceleration rate:
Platform backward acceleration rate:
Platform backward deceleration rate:
平台顺时间基数 MS
平台逆时间基数 MS
平台前时间基数 MS
平台后时间基数 MS
Platform clockwise time base: MS
Platform anticlockwise time base: MS
Platform forward time base: MS
Platform backward time base: MS
说明 数率数值越大 表示对应的臂架动作响应越快 反之越慢
Note: the larger on rate value, the faster on boom corresponding action, and
Примечание:
с повышением скорости, движение стрелы ускоряется
18.
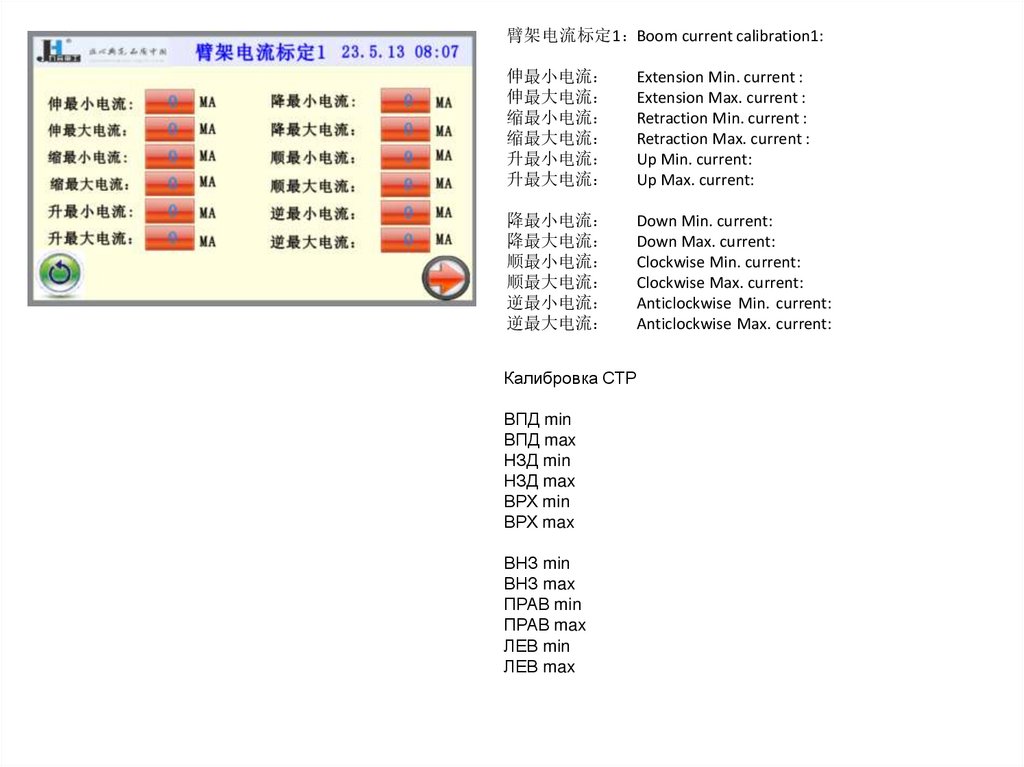
臂架电流标定1 Boom current calibration1:伸最小电流
伸最大电流
缩最小电流
缩最大电流
升最小电流
升最大电流
Extension Min. current :
Extension Max. current :
Retraction Min. current :
Retraction Max. current :
Up Min. current:
Up Max. current:
降最小电流
降最大电流
顺最小电流
顺最大电流
逆最小电流
逆最大电流
Down Min. current:
Down Max. current:
Clockwise Min. current:
Clockwise Max. current:
Anticlockwise Min. current:
Anticlockwise Max. current:
Калибровка СТР
ВПД min
ВПД max
НЗД min
НЗД max
ВРХ min
ВРХ max
ВНЗ min
ВНЗ max
ПРАВ min
ПРАВ max
ЛЕВ min
ЛЕВ max
19.
臂架电流标定2Boom current calibration2:
平台顺最小电流 Platform clockwise Min. current:
平台顺最大电流 Platform clockwise Max. current:
平台逆最小电流 Platform Anticlockwise Min. current:
平台逆最大电流 Platform Anticlockwise Max. current:
平台前最小电流 Platform forward Min. current:
平台前最大电流 Platform forward Max. current:
平台后最小电流 Platform backward Min. current:
平台后最大电流 Platform backward Max. current:
Калибровка ПЛАТ
ПРАВ min
ПРАВ max
ЛЕВ min
ЛЕВ max
ВПД min
ВПД max
НЗД min
НЗД max
20.
Заводские настройкиУгол ПЛАТ
Скорость СТР
Скорость ветра
Вес
Другое
Скорость вращ-я
出厂参数设置
Factory parameter settings:
长度角度标定
回转角度标定
限制速度设置
风速标定
重量标定
其他参数
转速标定
Boom length and angle calibration:
Turntable angle calibration:
Boom speed limit setting:
Wind speed calibration:
Weight Calibration:
Other parameters:
Rotation Speed Calibration:
21.
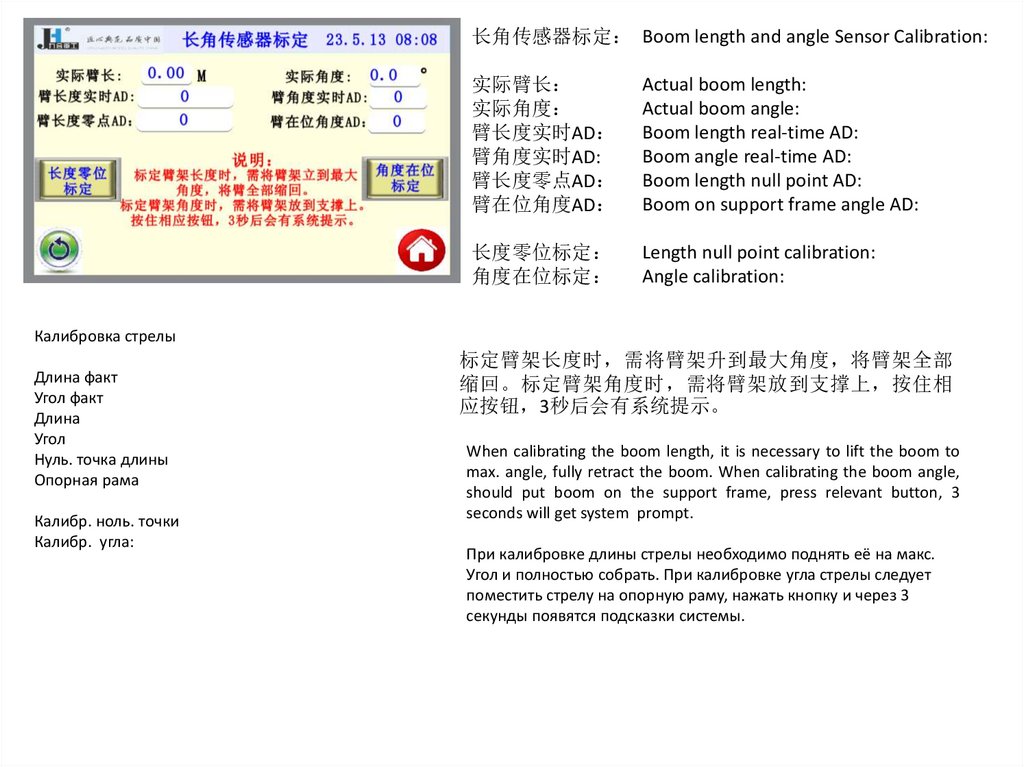
长角传感器标定 Boom length and angle Sensor Calibration:实际臂长
实际角度
臂长度实时AD
臂角度实时AD:
臂长度零点AD
臂在位角度AD
Actual boom length:
Actual boom angle:
Boom length real-time AD:
Boom angle real-time AD:
Boom length null point AD:
Boom on support frame angle AD:
长度零位标定
角度在位标定
Length null point calibration:
Angle calibration:
Калибровка стрелы
Длина факт
Угол факт
Длина
Угол
Нуль. точка длины
Опорная рама
Калибр. ноль. точки
Калибр. угла:
标定臂架长度时 需将臂架升到最大角度 将臂架全部
缩回。标定臂架角度时 需将臂架放到支撑上 按住相
应按钮 3秒后会有系统提示。
When calibrating the boom length, it is necessary to lift the boom to
max. angle, fully retract the boom. When calibrating the boom angle,
should put boom on the support frame, press relevant button, 3
seconds will get system prompt.
При калибровке длины стрелы необходимо поднять её на макс.
Угол и полностью собрать. При калибровке угла стрелы следует
поместить стрелу на опорную раму, нажать кнопку и через 3
секунды появятся подсказки системы.
22.
回转角度标定回转角度
角度系数
顺转角度限制
逆转角度限制
角度清零
Rotation angle calibration:
Rotation angle:
Angle coefficient:
Clockwise angle limit:
Anticlockwise angle limit:
Angle reset:
Калибровка угла
Угол поворота
Угловой коэффициент
Ограничение угла ПРАВ
Ограничение угла ЛЕВ
Сброс
23.
Скорость стрелыВперед
Назад
Вверх
Вниз
Право
Лево
臂架速度限制参数
Boom speed limit parameters:
伸末端限制电流
缩末端限制电流
升限制大电流
降限制大电流
顺限制大电流
逆限制大电流
Extension End limit current
Retraction End limit current
Up limit high current:
Down limit high current:
Clockwise limit high current:
Anticlockwise limit high current:
24.
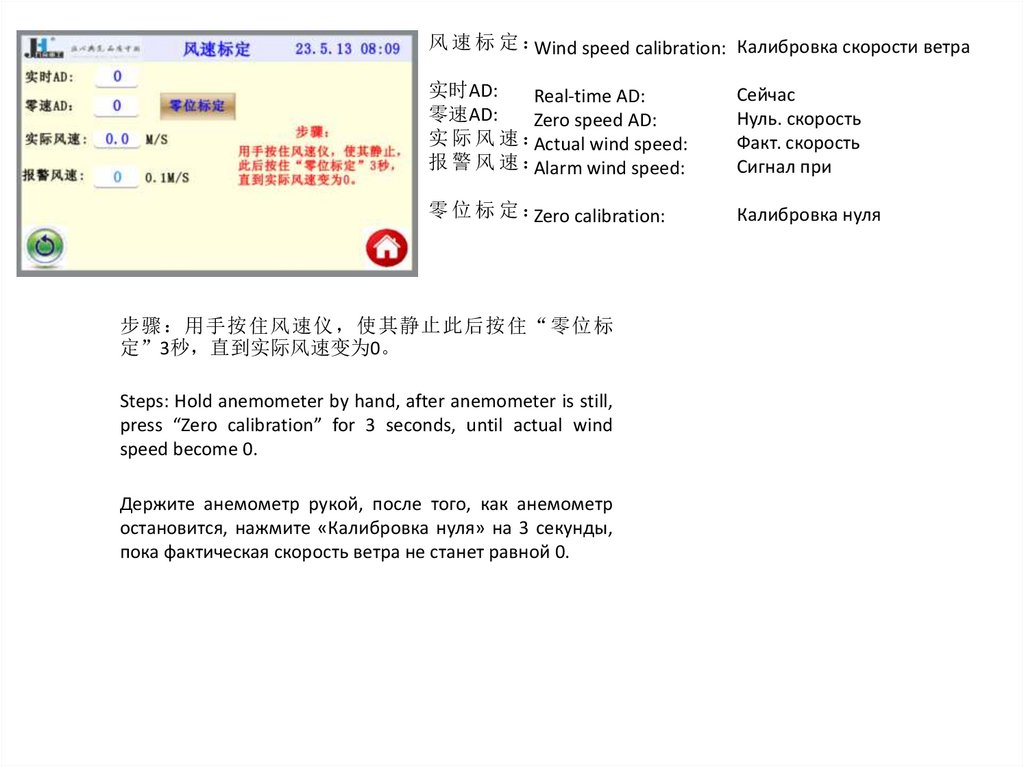
风 速 标 定 Wind speed calibration: Калибровка скорости ветра实时AD:
Real-time AD:
零速AD:
Zero speed AD:
实 际 风 速 Actual wind speed:
报 警 风 速 Alarm wind speed:
Сейчас
Нуль. скорость
Факт. скорость
Сигнал при
零 位 标 定 Zero calibration:
Калибровка нуля
步骤 用手按住风速仪 使其静止此后按住“零位标
定”3秒 直到实际风速变为0。
Steps: Hold anemometer by hand, after anemometer is still,
press “Zero calibration” for 3 seconds, until actual wind
speed become 0.
Держите анемометр рукой, после того, как анемометр
остановится, нажмите «Калибровка нуля» на 3 секунды,
пока фактическая скорость ветра не станет равной 0.
25.
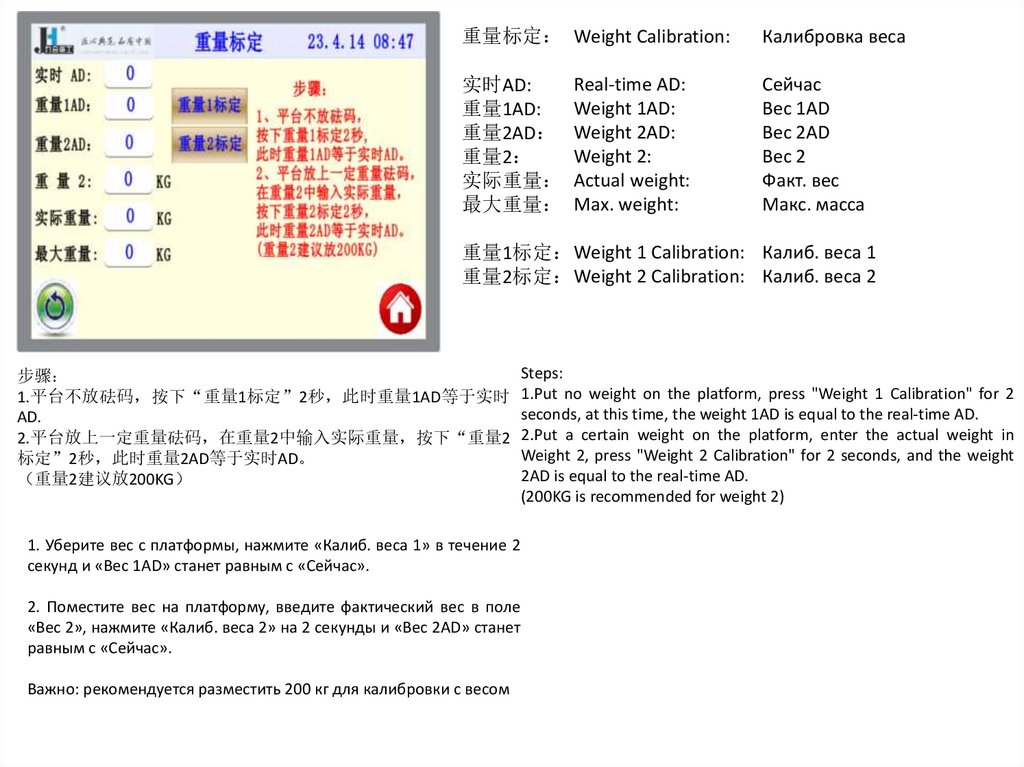
重量标定 Weight Calibration:Калибровка веса
Real-time AD:
实时AD:
Weight 1AD:
重量1AD:
重量2AD Weight 2AD:
Weight 2:
重量2
实际重量 Actual weight:
最大重量 Max. weight:
Сейчас
Вес 1AD
Вес 2AD
Вес 2
Факт. вес
Макс. масса
重量1标定 Weight 1 Calibration: Калиб. веса 1
重量2标定 Weight 2 Calibration: Калиб. веса 2
Steps:
步骤
1.平台不放砝码 按下“重量1标定”2秒 此时重量1AD等于实时 1.Put no weight on the platform, press "Weight 1 Calibration" for 2
seconds, at this time, the weight 1AD is equal to the real-time AD.
AD.
2.平台放上一定重量砝码 在重量2中输入实际重量 按下“重量2 2.Put a certain weight on the platform, enter the actual weight in
Weight 2, press "Weight 2 Calibration" for 2 seconds, and the weight
标定”2秒 此时重量2AD等于实时AD。
2AD is equal to the real-time AD.
重量2建议放200KG
(200KG is recommended for weight 2)
1. Уберите вес с платформы, нажмите «Калиб. веса 1» в течение 2
секунд и «Вес 1AD» станет равным с «Сейчас».
2. Поместите вес на платформу, введите фактический вес в поле
«Вес 2», нажмите «Калиб. веса 2» на 2 секунды и «Вес 2AD» станет
равным с «Сейчас».
Важно: рекомендуется разместить 200 кг для калибровки с весом
26.
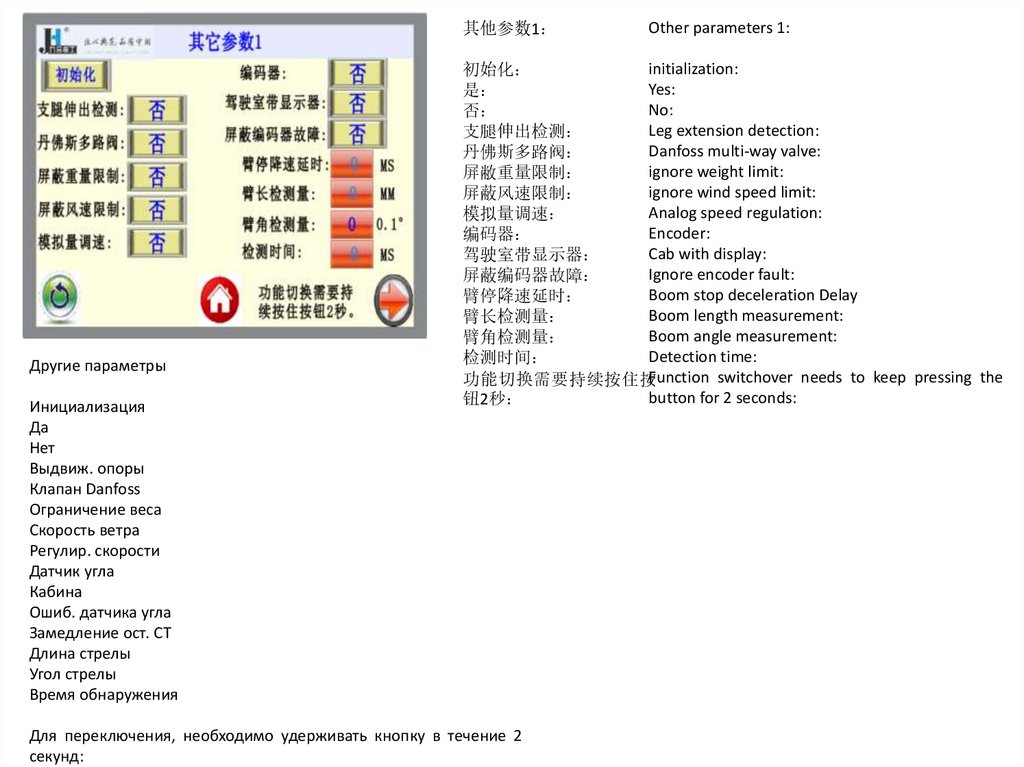
其他参数1Другие параметры
Инициализация
Да
Нет
Выдвиж. опоры
Клапан Danfoss
Ограничение веса
Скорость ветра
Регулир. скорости
Датчик угла
Кабина
Ошиб. датчика угла
Замедление ост. СТ
Длина стрелы
Угол стрелы
Время обнаружения
Other parameters 1:
initialization:
初始化
Yes:
是
No:
否
Leg extension detection:
支腿伸出检测
Danfoss multi-way valve:
丹佛斯多路阀
ignore weight limit:
屏敝重量限制
ignore wind speed limit:
屏蔽风速限制
Analog speed regulation:
模拟量调速
Encoder:
编码器
Cab with display:
驾驶室带显示器
Ignore encoder fault:
屏蔽编码器故障
Boom stop deceleration Delay
臂停降速延时
Boom length measurement:
臂长检测量
Boom angle measurement:
臂角检测量
Detection time:
检测时间
功能切换需要持续按住按Function switchover needs to keep pressing the
button for 2 seconds:
钮2秒
Для переключения, необходимо удерживать кнопку в течение 2
секунд:
27.
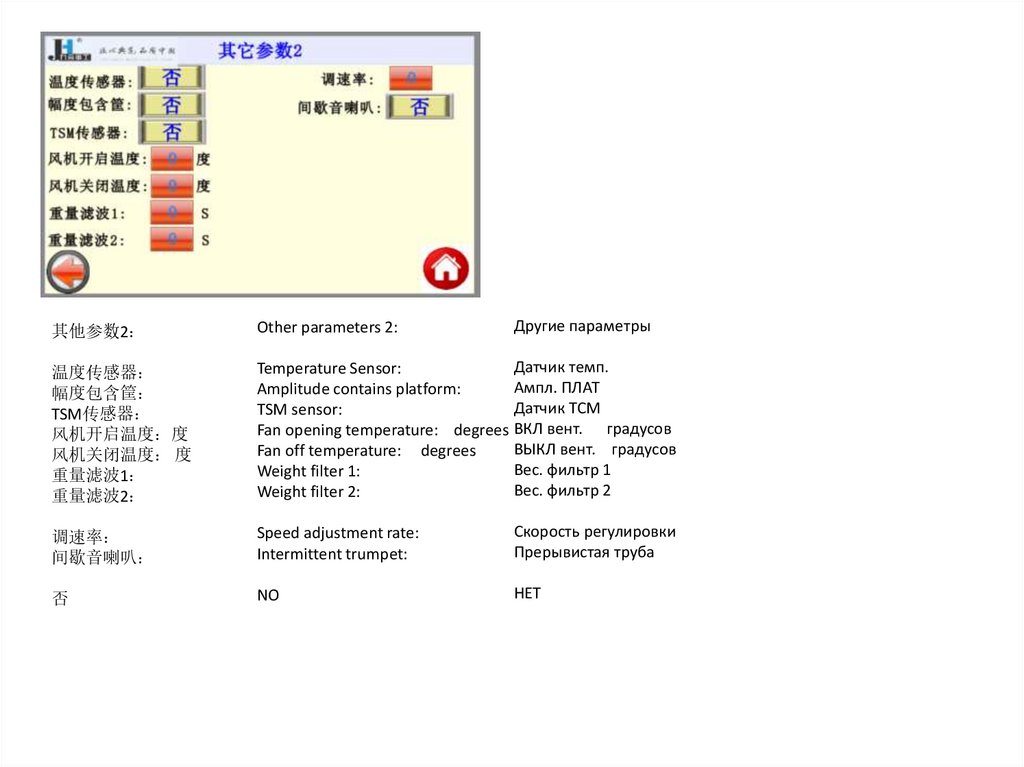
Другие параметры其他参数2
Other parameters 2:
温度传感器
幅度包含筐
TSM传感器
风机开启温度 度
风机关闭温度 度
重量滤波1
重量滤波2
Датчик темп.
Temperature Sensor:
Ампл. ПЛАТ
Amplitude contains platform:
Датчик ТСМ
TSM sensor:
Fan opening temperature: degrees ВКЛ вент. градусов
ВЫКЛ вент. градусов
Fan off temperature: degrees
Вес. фильтр 1
Weight filter 1:
Вес. фильтр 2
Weight filter 2:
调速率
间歇音喇叭
Speed adjustment rate:
Intermittent trumpet:
Скорость регулировки
Прерывистая труба
否
NO
НЕТ
28.
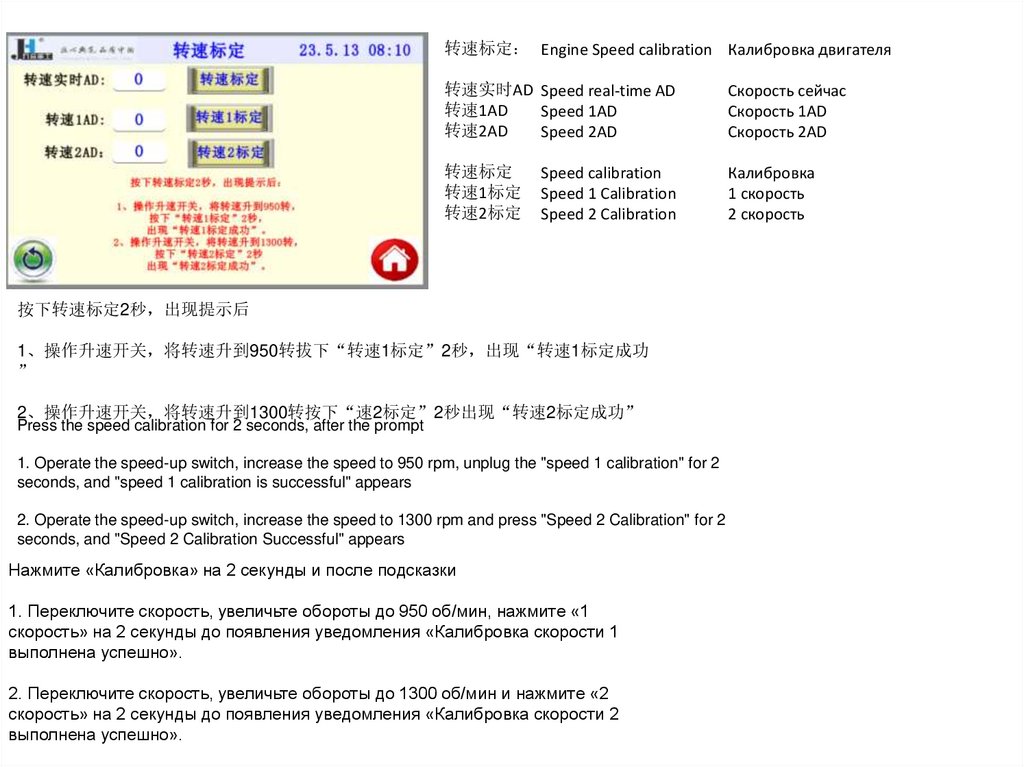
转速标定 Engine Speed calibration Калибровка двигателя转速实时AD Speed real-time AD
转速1AD
Speed 1AD
转速2AD
Speed 2AD
Скорость сейчас
Скорость 1AD
Скорость 2AD
转速标定
转速1标定
转速2标定
Калибровка
1 скорость
2 скорость
Speed calibration
Speed 1 Calibration
Speed 2 Calibration
按下转速标定2秒 出现提示后
1、操作升速开关 将转速升到950转拔下“转速1标定”2秒 出现“转速1标定成功
”
2、操作升速开关 将转速升到1300转按下“速2标定”2秒出现“转速2标定成功”
Press the speed calibration for 2 seconds, after the prompt
1. Operate the speed-up switch, increase the speed to 950 rpm, unplug the "speed 1 calibration" for 2
seconds, and "speed 1 calibration is successful" appears
2. Operate the speed-up switch, increase the speed to 1300 rpm and press "Speed 2 Calibration" for 2
seconds, and "Speed 2 Calibration Successful" appears
Нажмите «Калибровка» на 2 секунды и после подсказки
1. Переключите скорость, увеличьте обороты до 950 об/мин, нажмите «1
скорость» на 2 секунды до появления уведомления «Калибровка скорости 1
выполнена успешно».
2. Переключите скорость, увеличьте обороты до 1300 об/мин и нажмите «2
скорость» на 2 секунды до появления уведомления «Калибровка скорости 2
выполнена успешно».
29.
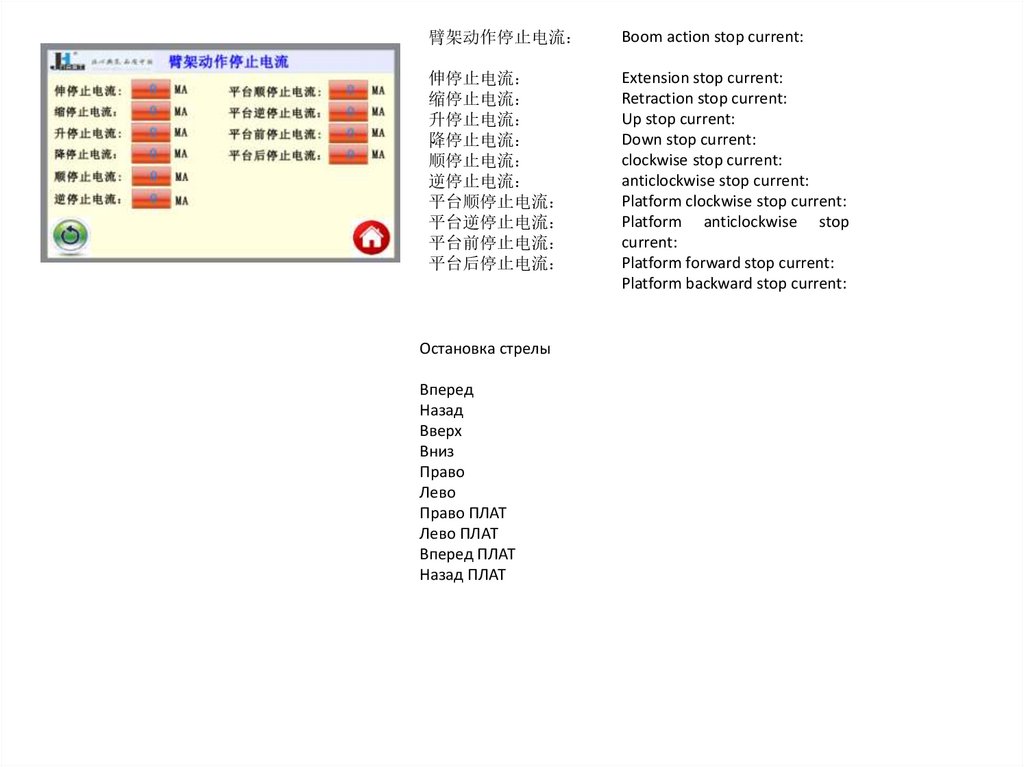
臂架动作停止电流Boom action stop current:
伸停止电流
缩停止电流
升停止电流
降停止电流
顺停止电流
逆停止电流
平台顺停止电流
平台逆停止电流
平台前停止电流
平台后停止电流
Extension stop current:
Retraction stop current:
Up stop current:
Down stop current:
clockwise stop current:
anticlockwise stop current:
Platform clockwise stop current:
Platform anticlockwise stop
current:
Platform forward stop current:
Platform backward stop current:
Остановка стрелы
Вперед
Назад
Вверх
Вниз
Право
Лево
Право ПЛАТ
Лево ПЛАТ
Вперед ПЛАТ
Назад ПЛАТ
30.
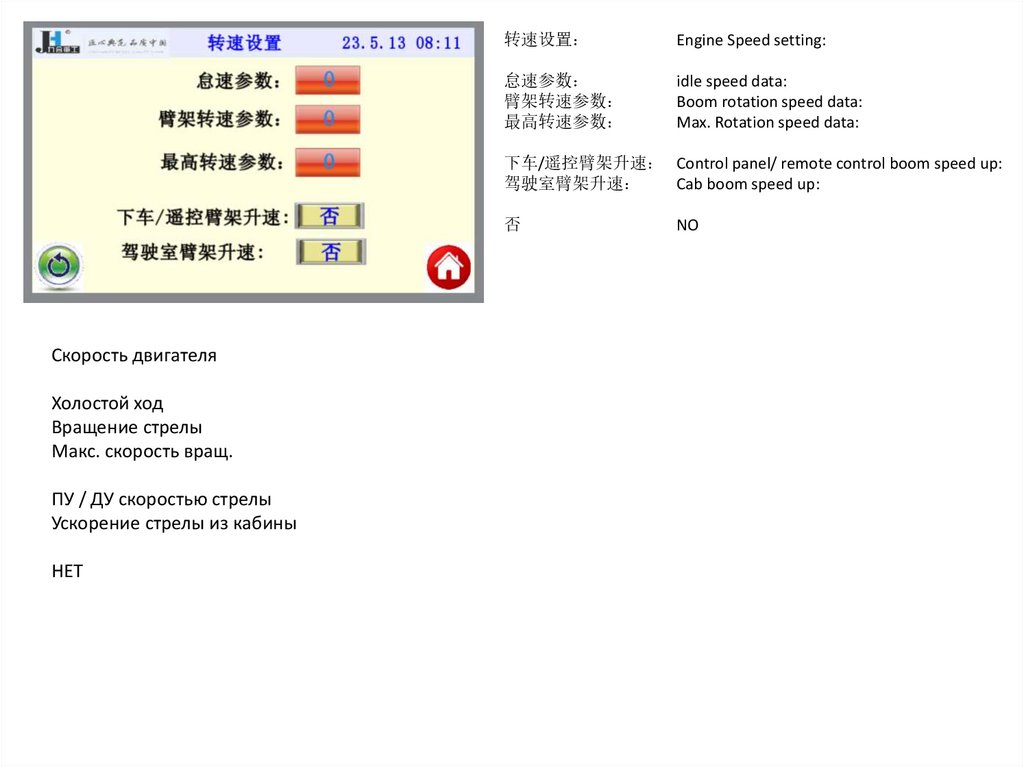
转速设置Engine Speed setting:
怠速参数
臂架转速参数
最高转速参数
idle speed data:
Boom rotation speed data:
Max. Rotation speed data:
下车/遥控臂架升速 Control panel/ remote control boom speed up:
Cab boom speed up:
驾驶室臂架升速
否
Скорость двигателя
Холостой ход
Вращение стрелы
Макс. скорость вращ.
ПУ / ДУ скоростью стрелы
Ускорение стрелы из кабины
НЕТ
NO
31.
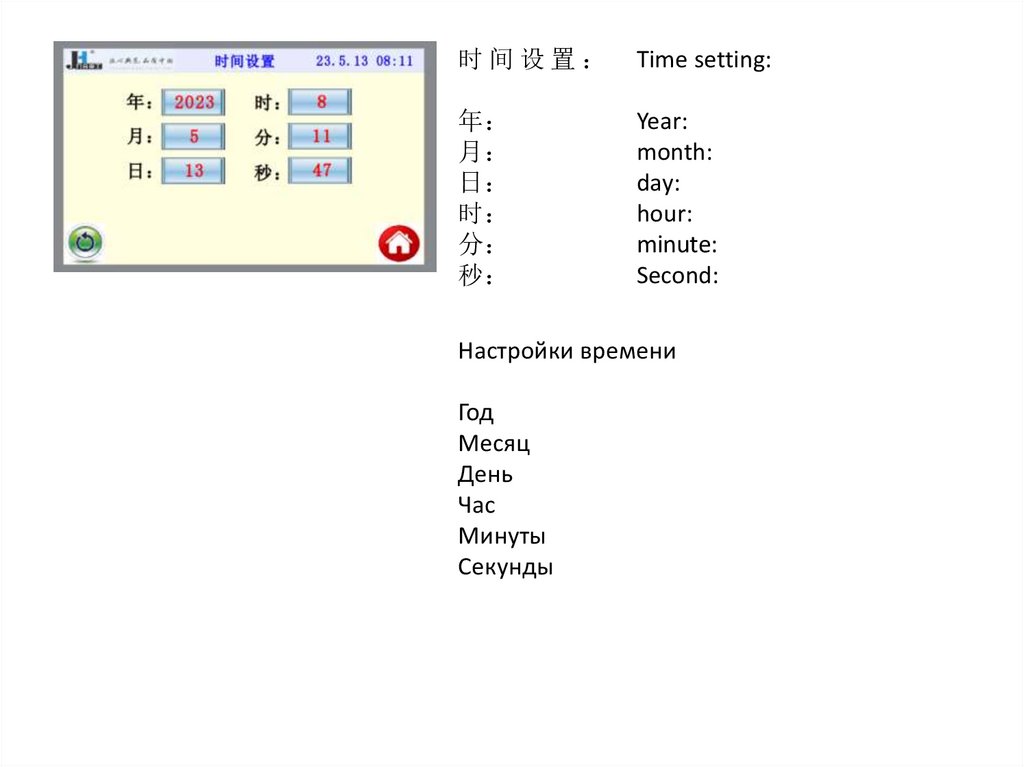
时间设置Time setting:
年
月
日
时
分
秒
Year:
month:
day:
hour:
minute:
Second:
Настройки времени
Год
Месяц
День
Час
Минуты
Секунды
32.
故障应急设置故障应急
故障应急需要持续按住按钮3秒钟 出现“故障应急确认” 按下
“故障应急确认” 提示故障应急中···。
注 故障应急中 只允许通过操作多路阀手柄来控制臂架 此时
臂架伸出动作被禁止。每次应急操作时间为5分钟。
Failure emergency settings:
Failure emergency :
Failure emergency needs to keep pressing the button for 3 seconds,
"Fault emergency confirmation" will appear, press "Fault emergency
confirmation", it will prompt “Failure emergency handling....”.
Настройка аварийного отказа
Аварийный отказ
Note: In failure emergency, the boom is only allowed to be controlled
by operating the handle of the multi-way valve, and the boom
extension is prohibited at this time. Each emergency operation time is
5 minutes.
Необходимо удерживать «Аварийный отказ» в течение 3
секунд, после появления «Подтверждение аварийного
сбоя», нажмите «Подтверждение аварийного сбоя»,
появится сообщение « Устранение аварийного сбоя... » .
Примечание. В аварийной ситуации стрелой можно
управлять только с помощью рукоятки, выдвижение
стрелы в это время запрещено. Время каждой аварийной
операции составляет 5 минут.