













 Физика
ФизикаПохожие презентации:










Статика. Связи и реакции связей
1. СТАТИКА
2.
Статика – это раздел теоретической механики, в котором изучаются условия равновесия материальных объектов(тел) под действием прилагаемых сил и методы эквивалентного преобразования систем сил, приведения их к более
простому виду.
Под равновесием понимают состояние покоя или равномерное, прямолинейное и поступательное движение по
отношению к неподвижной системе координат.
Все разнообразие материальных объектов моделируется: материальной точкой, системой материальных точек и
абсолютно твердым телом.
Материальной точкой называют простую модель материального объекта, размеры которого настолько малые,
что ими можно пренебрегать при изучении того или иного движения. То есть – это геометрическая точка, которая
имеет массу.
Система материальных точек – это совокупность материальных точек, движение и положение каждой из
которых зависит от движения и положения всех остальных точек.
Абсолютно твердым телом (в дальнейшем твердым телом) называют систему материальных точек,
расстояния между которыми остаются все время неизменными.
3.
Сила – это векторная величина, которая является мерой механического взаимодействия междуматериальными объектами.
Она характеризуется:
•модулем,
•направлением,
•точкой приложения.
Точка приложения силы и ее направление определяют линию действия силы.
4.
.Связи и реакции связей
Свободное
тело
–
свобода
перемещений
ограничивается никакими другими телами.
Несвободное
телами.
тело
–
его
движение
ограничено
тела
не
другими
Связь – тело, ограничивающее свободу перемещений объекта.
Реакция связи – сила, действующая на объект со стороны
связи.
Принцип освобождаемости от связи – несвободное тело можно
рассматривать как свободное, если отбросить связи и
заменить их действие соответствующими реакциями
5.
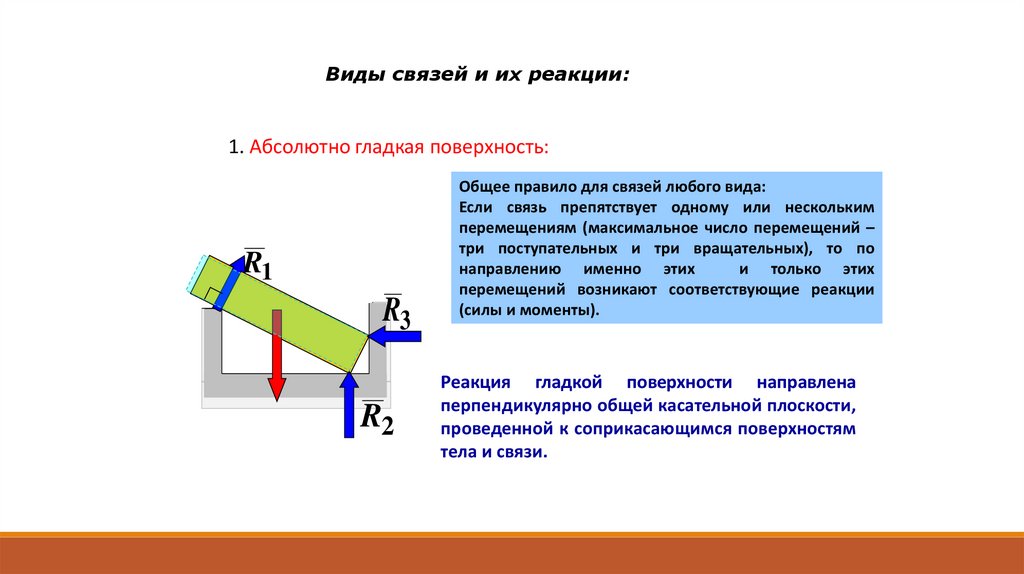
Виды связей и их реакции:1. Абсолютно гладкая поверхность:
R1
R3
R2
Общее правило для связей любого вида:
Если связь препятствует одному или нескольким
перемещениям (максимальное число перемещений –
три поступательных и три вращательных), то по
направлению именно этих
и только этих
перемещений возникают соответствующие реакции
(силы и моменты).
Реакция гладкой поверхности направлена
перпендикулярно общей касательной плоскости,
проведенной к соприкасающимся поверхностям
тела и связи.
6.
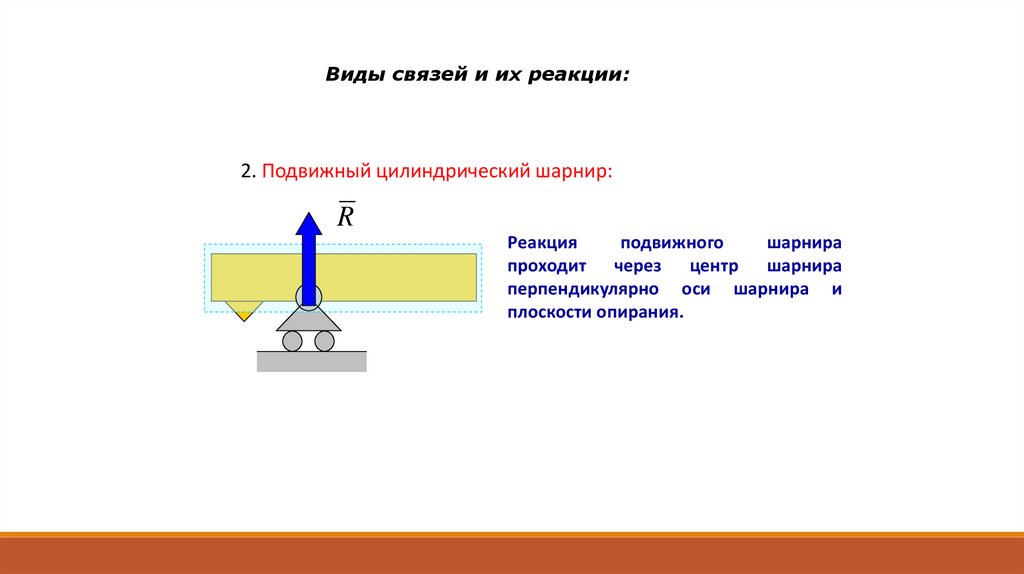
Виды связей и их реакции:2. Подвижный цилиндрический шарнир:
R
Реакция
подвижного
шарнира
проходит через центр шарнира
перпендикулярно оси шарнира и
плоскости опирания.
7.
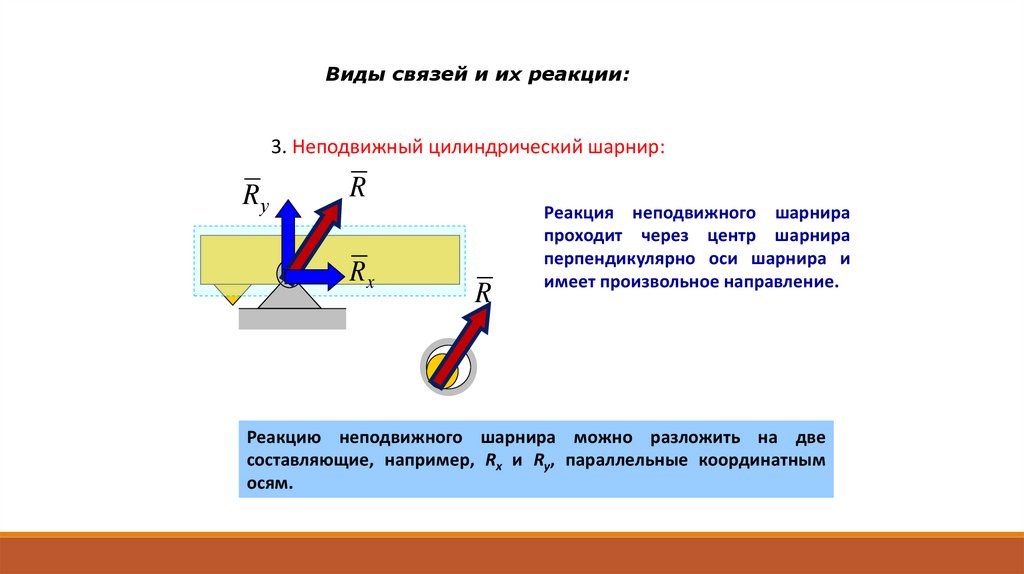
Виды связей и их реакции:3. Неподвижный цилиндрический шарнир:
Rу
R
Rx
R
Реакция неподвижного шарнира
проходит через центр шарнира
перпендикулярно оси шарнира и
имеет произвольное направление.
Реакцию неподвижного шарнира можно разложить на две
составляющие, например, Rx и Ry, параллельные координатным
осям.
8.
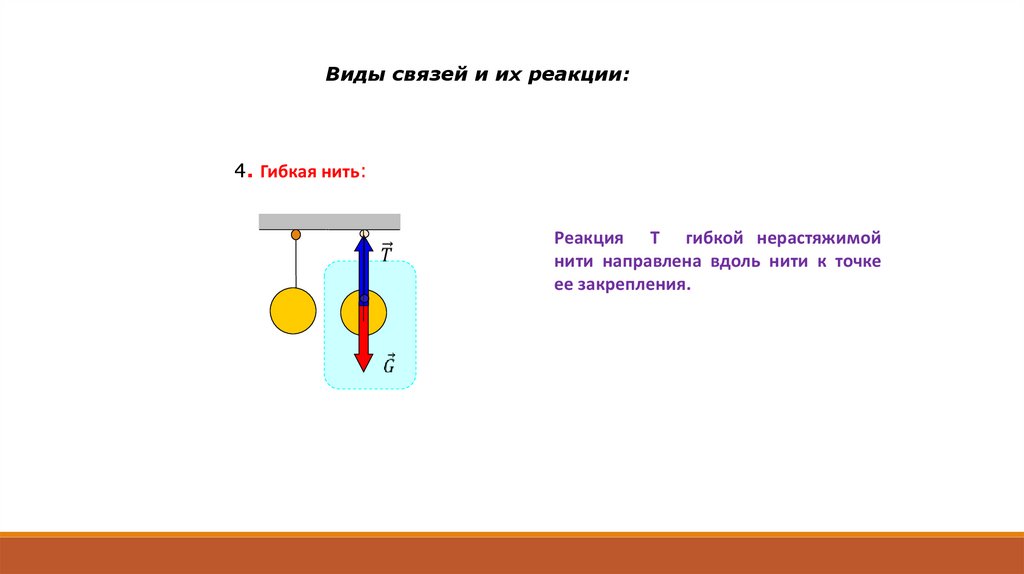
Виды связей и их реакции:4. Гибкая нить:
Реакция T гибкой нерастяжимой
нити направлена вдоль нити к точке
ее закрепления.
9.
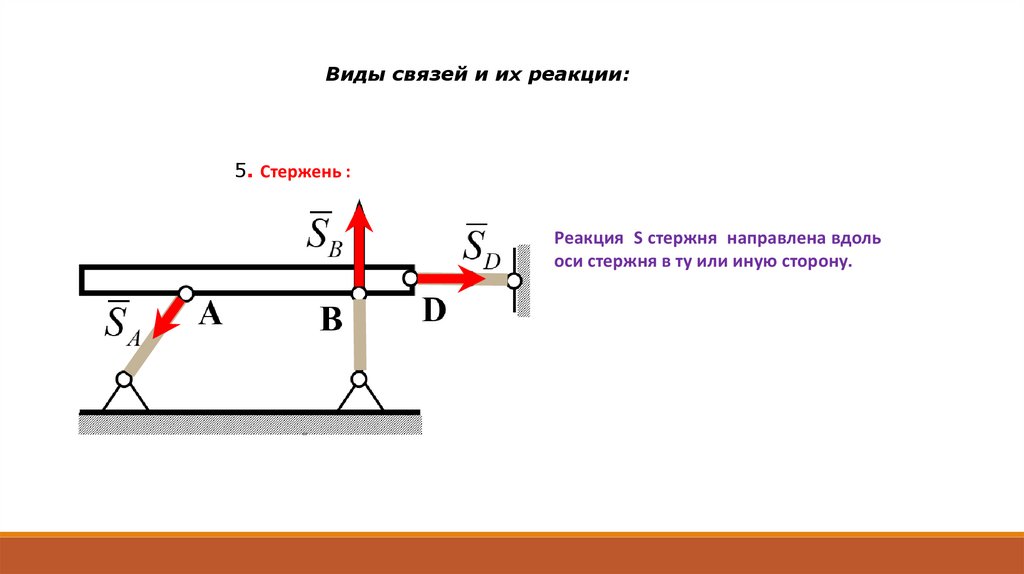
Виды связей и их реакции:5. Стержень :
Реакция S стержня направлена вдоль
оси стержня в ту или иную сторону.
10.
Виды связей и их реакции:6. Неподвижный сферический шарнир:
Rz
R
Реакция неподвижного сферического
шарнира проходит через центр
шарнира и имеет произвольное
направление в пространстве.
Ry
Rx
Реакцию неподвижного сферического
шарнира можно разложить на три
составляющие, например, Rx, Ry, Rz,
параллельные координатным осям.
11.
Виды связей и их реакции:7. Жесткая плоская заделка:
Ry
MA
A
А
Rx
В жесткой плоской заделке
возникает три реактивных усилия:
две составляющие реактивные
силы Rx и Ry, а также реактивный
момент (пара сил) MA .
12.
Система сходящихся сил (ССС) − это система сил, линии действия которых пересекаются в одной точкеF2
F1
F3
F4
13.
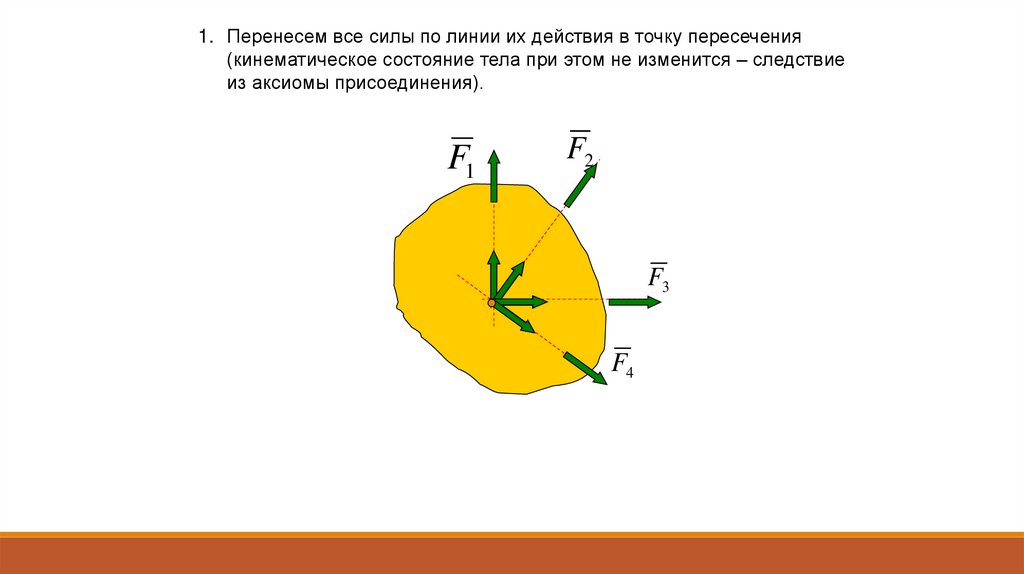
1. Перенесем все силы по линии их действия в точку пересечения(кинематическое состояние тела при этом не изменится – следствие
из аксиомы присоединения).
F1
F2
F3
F4
14.
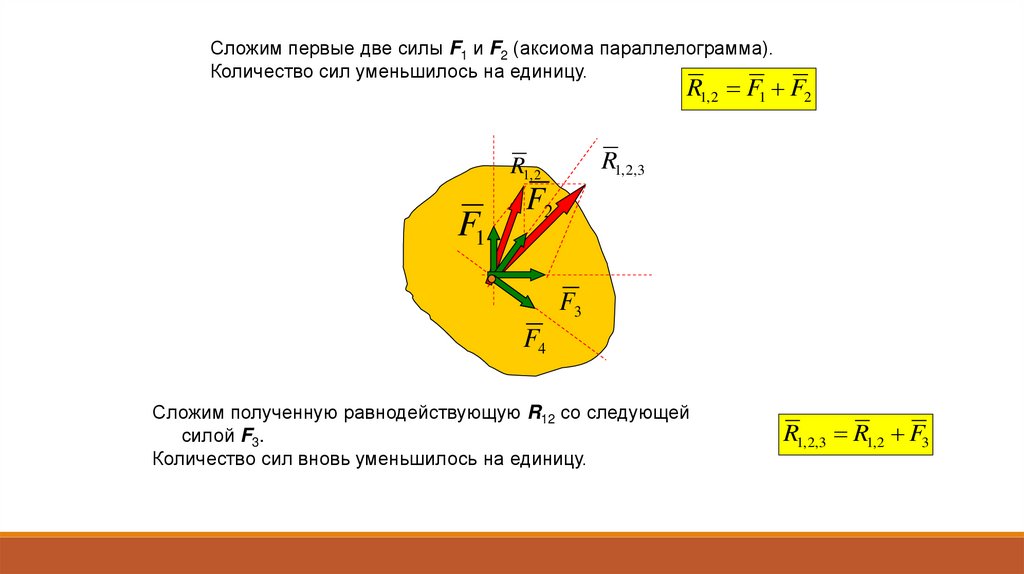
Сложим первые две силы F1 и F2 (аксиома параллелограмма).Количество сил уменьшилось на единицу.
R1, 2 F1 F2
R1, 2,3
R1, 2
F1
F2
F3
F4
Сложим полученную равнодействующую R12 со следующей
силой F3.
Количество сил вновь уменьшилось на единицу.
R1, 2,3 R1, 2 F3
15.
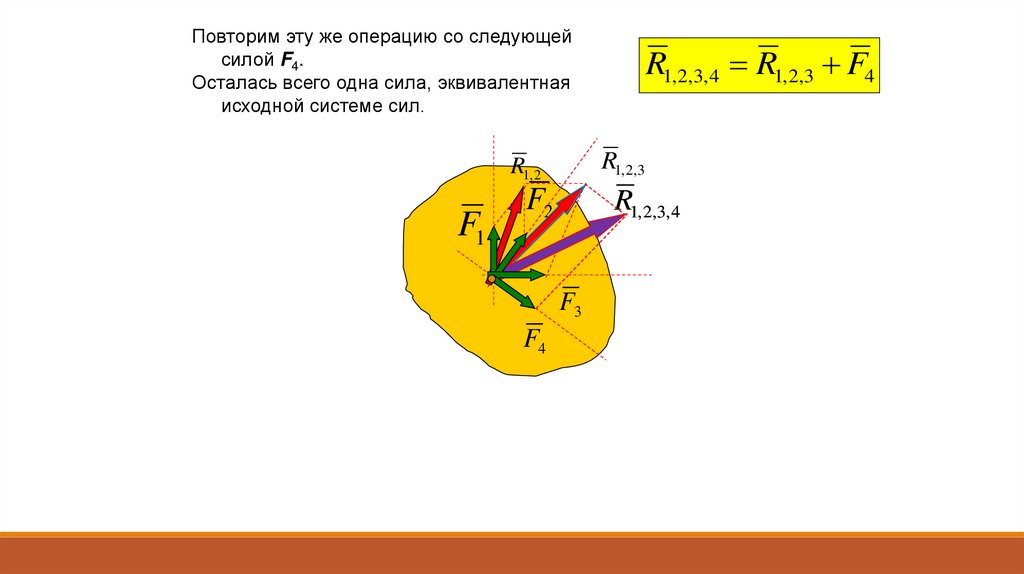
Повторим эту же операцию со следующейсилой F4.
Осталась всего одна сила, эквивалентная
исходной системе сил.
F1
R1, 2,3, 4 R1, 2,3 F4
R1, 2
R1, 2,3
F2
R1, 2,3, 4
F3
F4
16.
F2F1
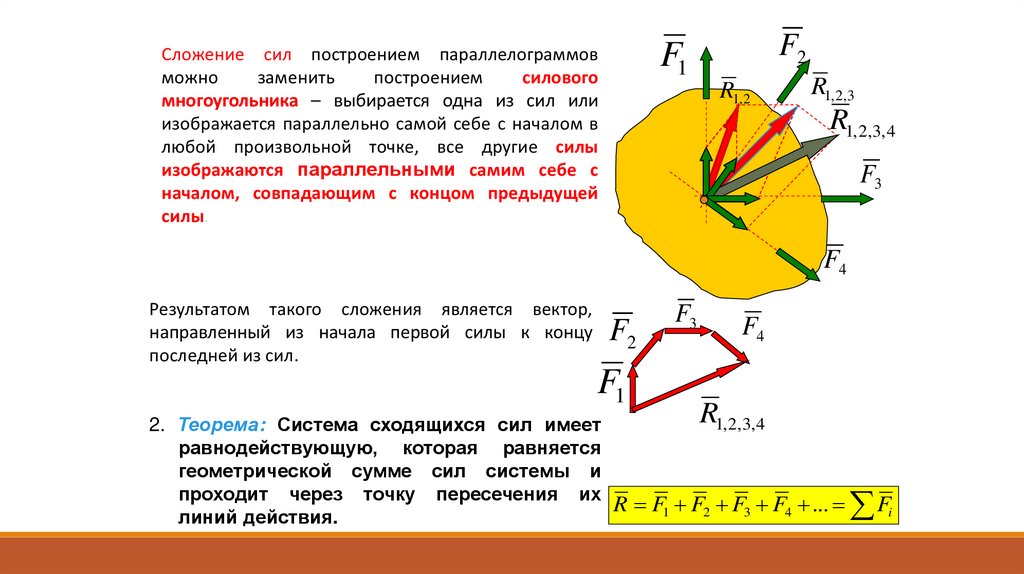
Сложение сил построением параллелограммов
можно
заменить
построением
силового
многоугольника – выбирается одна из сил или
изображается параллельно самой себе с началом в
любой произвольной точке, все другие силы
изображаются параллельными самим себе с
началом, совпадающим с концом предыдущей
силы.
R1, 2
R1, 2,3
R1, 2,3, 4
F3
F4
Результатом такого сложения является вектор,
направленный из начала первой силы к концу
последней из сил.
F2
F3
F4
F1
R1, 2,3, 4
2. Теорема: Система сходящихся сил имеет
равнодействующую, которая равняется
геометрической сумме сил системы и
проходит через точку пересечения их
R F1 F2 F3 F4 ...
линий действия.
F
i
17.
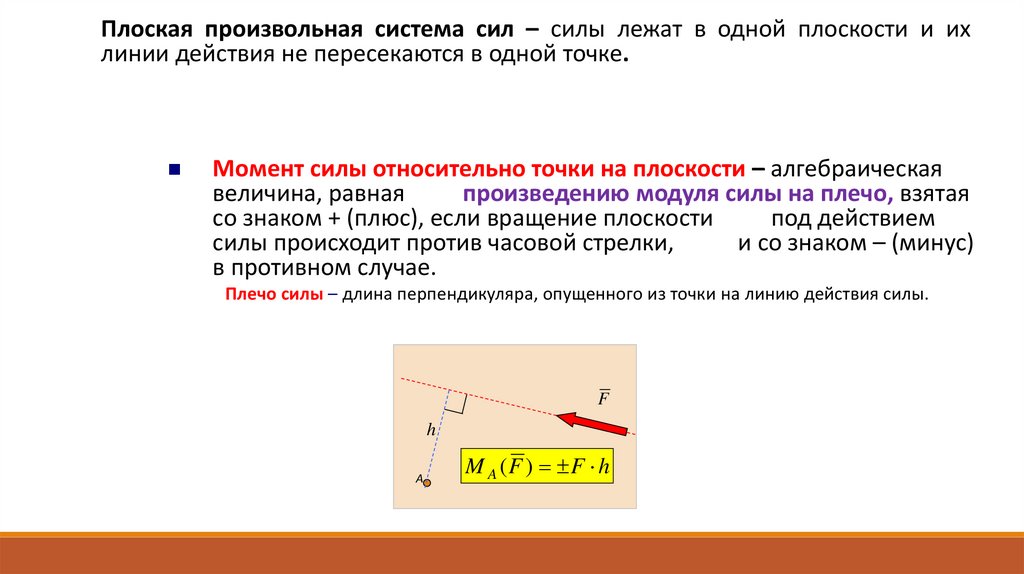
Плоская произвольная система сил – силы лежат в одной плоскости и ихлинии действия не пересекаются в одной точке.
Момент силы относительно точки на плоскости – алгебраическая
величина, равная
произведению модуля силы на плечо, взятая
со знаком + (плюс), если вращение плоскости
под действием
силы происходит против часовой стрелки,
и со знаком – (минус)
в противном случае.
Плечо силы – длина перпендикуляра, опущенного из точки на линию действия силы.
F
h
A
M A (F ) F h
18.
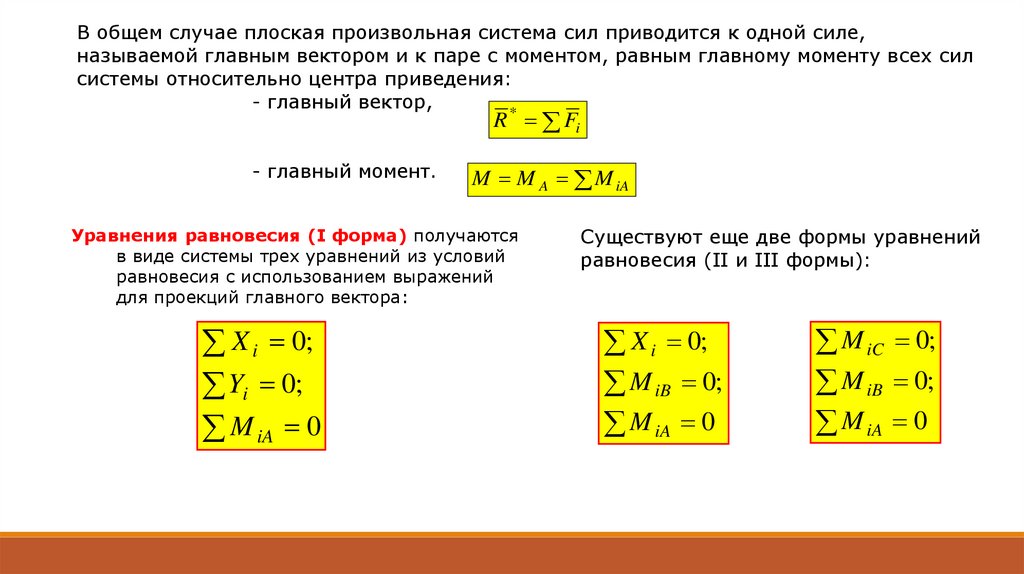
В общем случае плоская произвольная система сил приводится к одной силе,называемой главным вектором и к паре с моментом, равным главному моменту всех сил
системы относительно центра приведения:
- главный вектор,
*
R Fi
- главный момент.
M M A M iA
Уравнения равновесия (I форма) получаются
в виде системы трех уравнений из условий
равновесия с использованием выражений
для проекций главного вектора:
X i 0;
Yi 0;
M iA 0
Существуют еще две формы уравнений
равновесия (II и III формы):
X i 0;
M iB 0;
M iA 0
M iC 0;
M iB 0;
M iA 0
19.
Определение равнодействующей системы сходящихся сил методом проекций и расчет реакций связиПоследовательность действий
1.Расставить реакции связей
2.Найти проекции всех сил
3.Составить уравнения равновесия системы
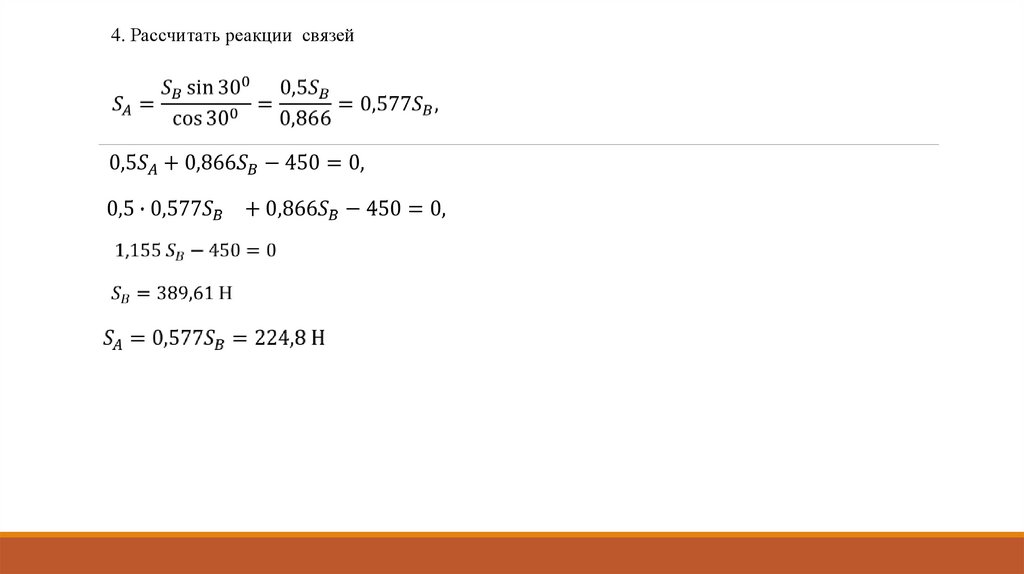
4.Рассчитать реакции связей
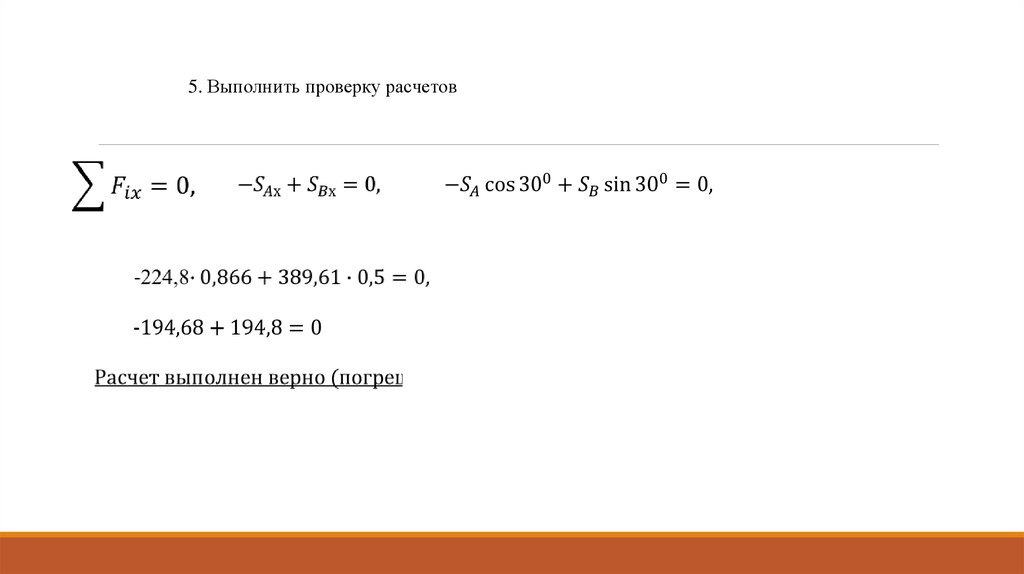
5.Выполнить проверку расчетов
20.
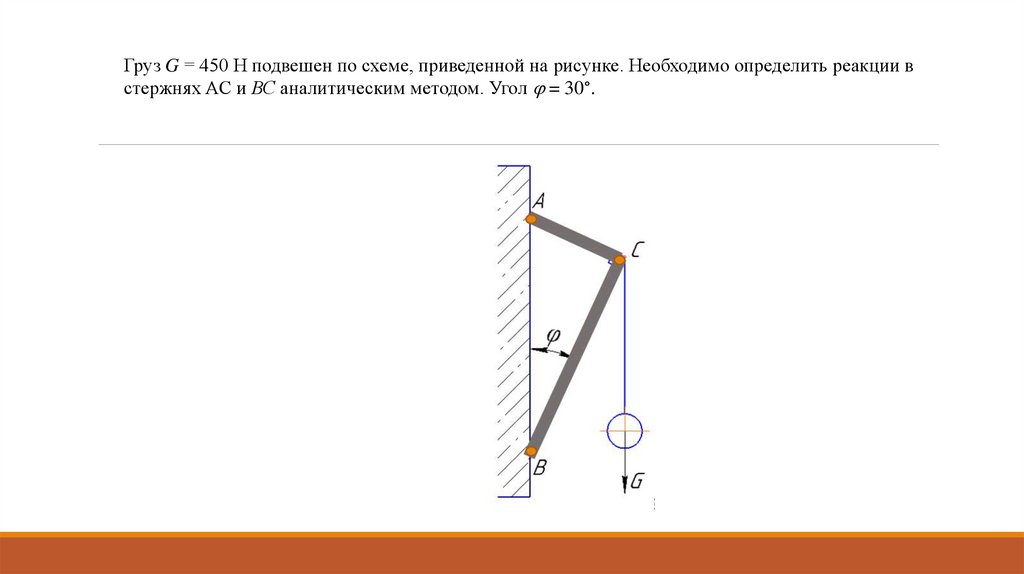
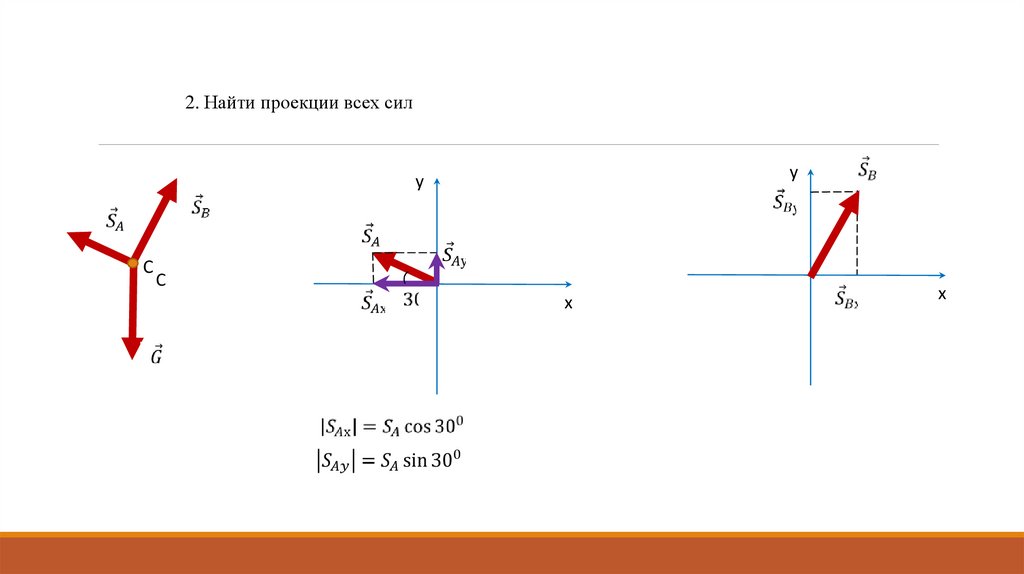
Груз G = 450 Н подвешен по схеме, приведенной на рисунке. Необходимо определить реакции встержнях АС и ВС аналитическим методом. Угол = 30°.
21.
1. Расставить реакции связей22.
2. Найти проекции всех силу
у
С
С
х
х
23.
2. Найти проекции всех силу
х
24.
3. Составить уравнения равновесия системыу
х
25.
4. Рассчитать реакции связей26.
4. Рассчитать реакции связей27.
5. Выполнить проверку расчетов28.
Расчет балочных систем1. Расставить реакции связей
2. Найти проекции сил при необходимости
3. Рассчитать силу Q
4. Составить расчетную схему
5. Составить уравнения равновесия
6. Рассчитать реакции опор
7. Выполнить проверку расчетов
29.
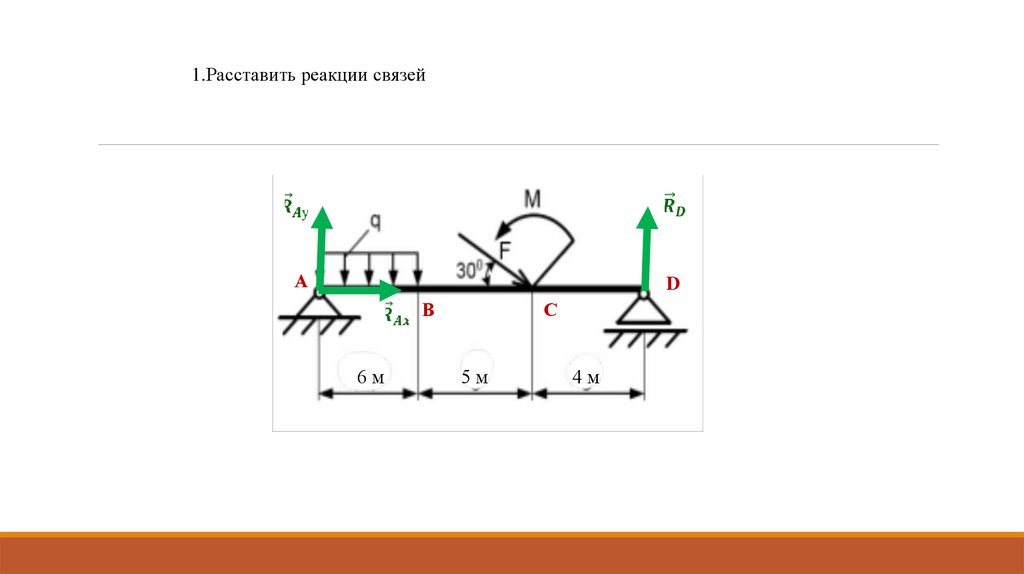
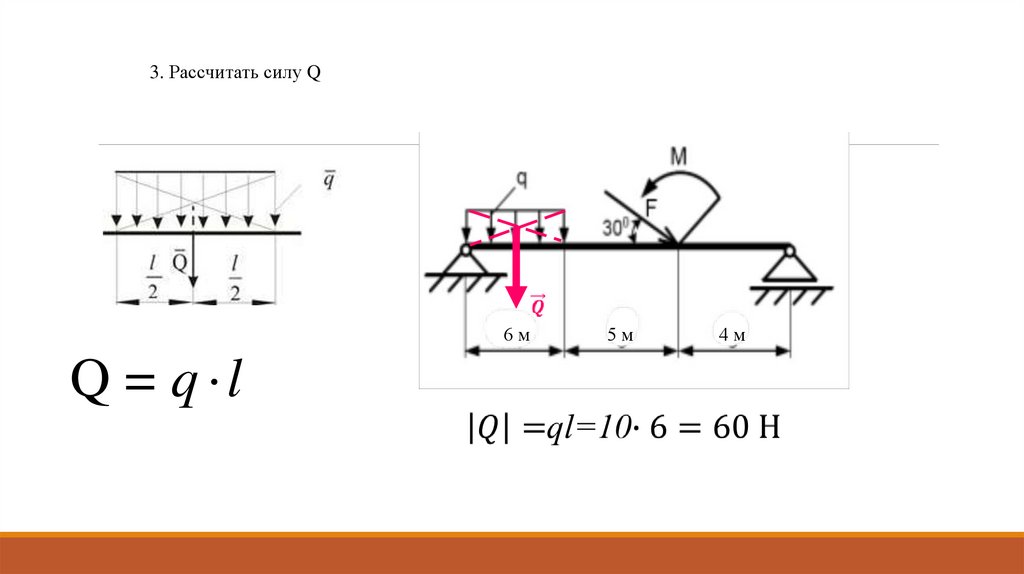
Балка с шарнирными опорами в точках А и В нагружена, как показано на рисунке, моментомМ=50 Нм, сосредоточенной силой F=25 Н и равномерно распределенной нагрузкой
интенсивностью q= 10 Н/м Определить реакции опор.
6м
5м
4м
30.
1.Расставить реакции связейА
D
В
6м
С
5м
4м
31.
2. Найти проекции сил при необходимостиу
х
32.
3. Рассчитать силу QQ = q l
6м
5м
4м
33.
4. Составить расчетную схемуМ
А
D
В
6м
С
5м
4м
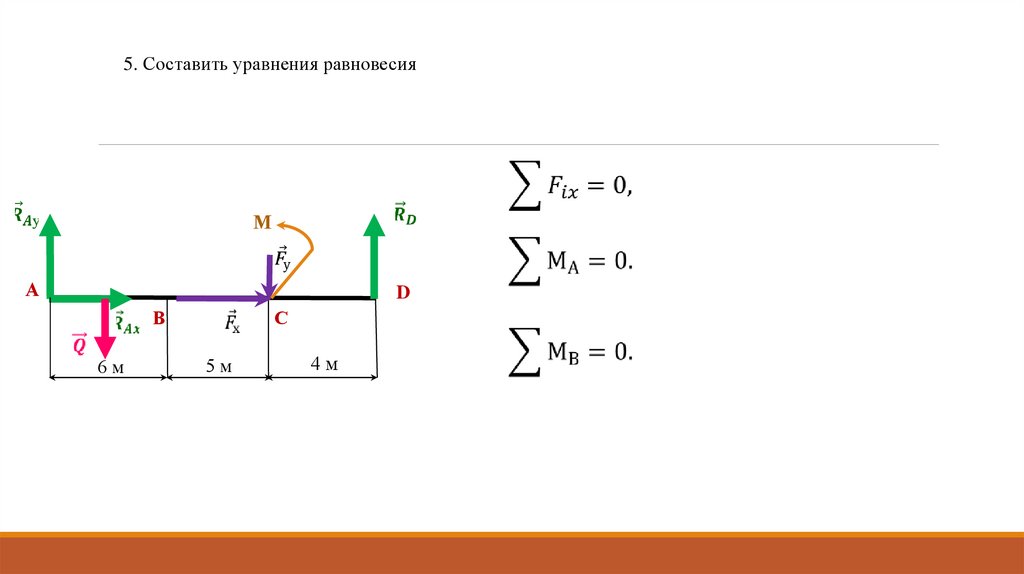
34.
5. Составить уравнения равновесияМ
А
D
В
6м
С
5м
4м
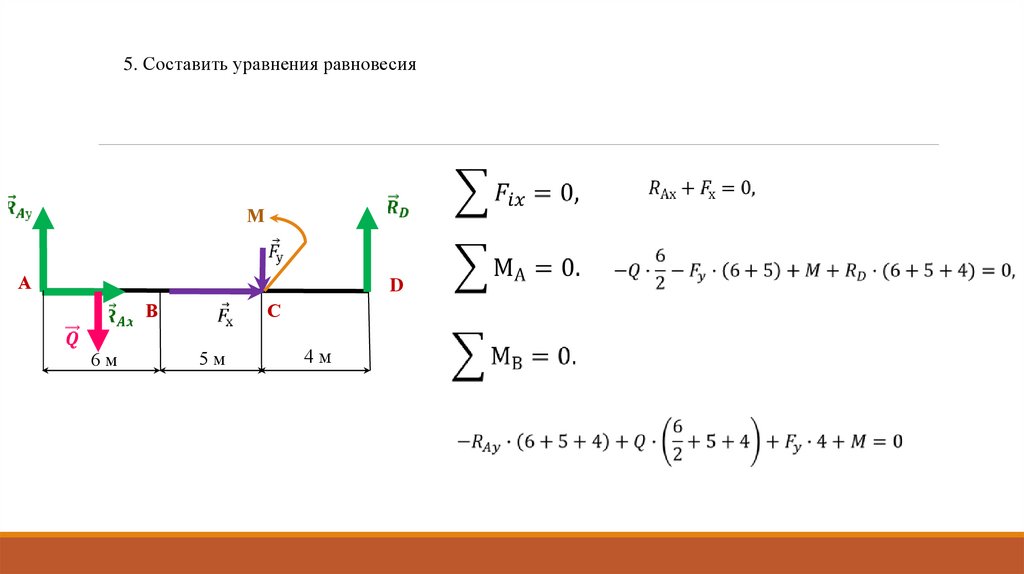
35.
5. Составить уравнения равновесияМ
А
D
В
6м
С
5м
4м
36.
6. Рассчитать реакции опор37.
7. Выполнить проверку расчетовМ
А
D
В
6м
С
5м
4м