
 Электроника
Электроника Промышленность
ПромышленностьПохожие презентации:










Навесное оборудование для промышленных и коллаборативных роботов
1.
Навесное оборудованиедля промышленных и коллаборативных роботов
Каталог типового оборудования
Осень 2023
2.
О нас:Разрабатываем, производим и поставляем
навесное оборудование и компоненты для
промышленной робототехники.
итд
3.
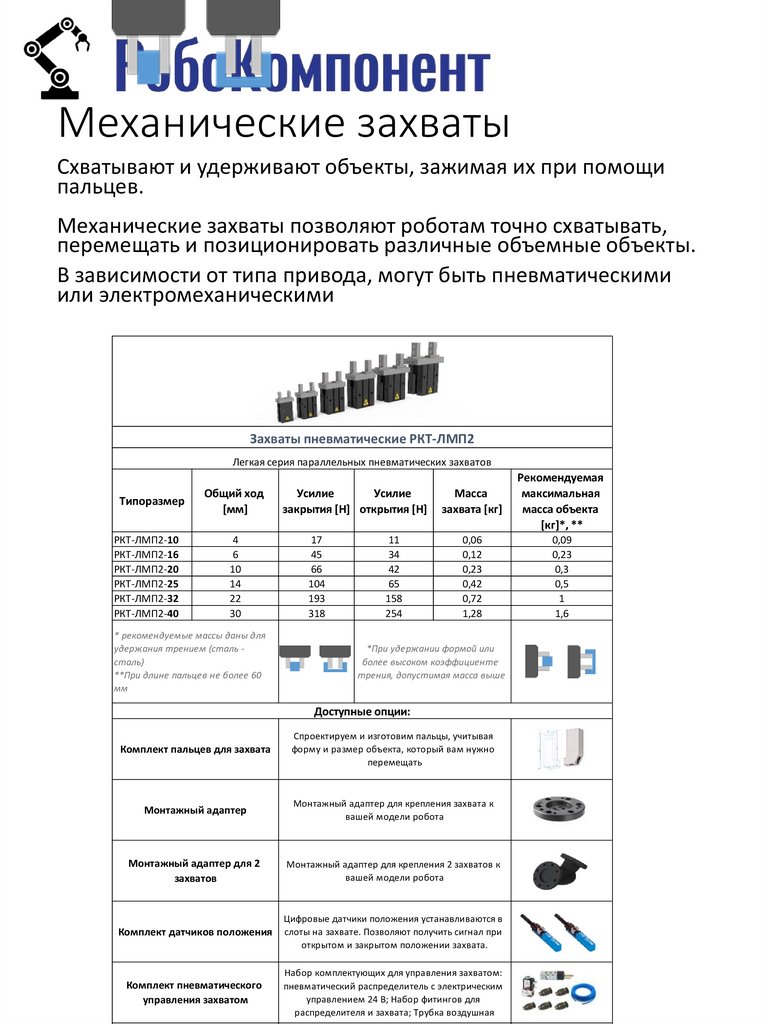
Механические захватыСхватывают и удерживают объекты, зажимая их при помощи
пальцев.
Механические захваты позволяют роботам точно схватывать,
перемещать и позиционировать различные объемные объекты.
В зависимости от типа привода, могут быть пневматическими
или электромеханическими
Захваты пневматические РКТ-ЛМП2
Легкая серия параллельных пневматических захватов
Типоразмер
Общий ход
[мм]
РКТ-ЛМП2-10
РКТ-ЛМП2-16
РКТ-ЛМП2-20
РКТ-ЛМП2-25
РКТ-ЛМП2-32
РКТ-ЛМП2-40
4
6
10
14
22
30
* рекомендуемые массы даны для
удержания трением (сталь сталь)
**При длине пальцев не более 60
мм
Усилие
Усилие
закрытия [Н] открытия [Н]
17
45
66
104
193
318
11
34
42
65
158
254
Масса
захвата [кг]
Рекомендуемая
максимальная
масса объекта
[кг]*, **
0,06
0,12
0,23
0,42
0,72
1,28
0,09
0,23
0,3
0,5
1
1,6
*При удержании формой или
более высоком коэффициенте
трения, допустимая масса выше
Доступные опции:
Комплект пальцев для захвата
Спроектируем и изготовим пальцы, учитывая
форму и размер объекта, который вам нужно
перемещать
Монтажный адаптер
Монтажный адаптер для крепления захвата к
вашей модели робота
Монтажный адаптер для 2
захватов
Монтажный адаптер для крепления 2 захватов к
вашей модели робота
Комплект датчиков положения
Цифровые датчики положения устанавливаются в
слоты на захвате. Позволяют получить сигнал при
открытом и закрытом положении захвата.
Комплект пневматического
управления захватом
Набор комплектующих для управления захватом:
пневматический распределитель с электрическим
управлением 24 В; Набор фитингов для
распределителя и захвата; Трубка воздушная