 Электроника
ЭлектроникаПохожие презентации:










Кинематика подъемных установок с органами навивки постоянного радиуса
1.
Кинематика подъемных установокс органами навивки постоянного
радиуса.
Кинематика клетевых ПУ
Кинематика двухконцевых скиповых
подъемных установок
2.
При изучении кинематики ПУ будем рассматривать величины: V- скорость движения сосуда,а - ускорение сосуда, h - пройденный путь.
Кинематика клетевых ПУ
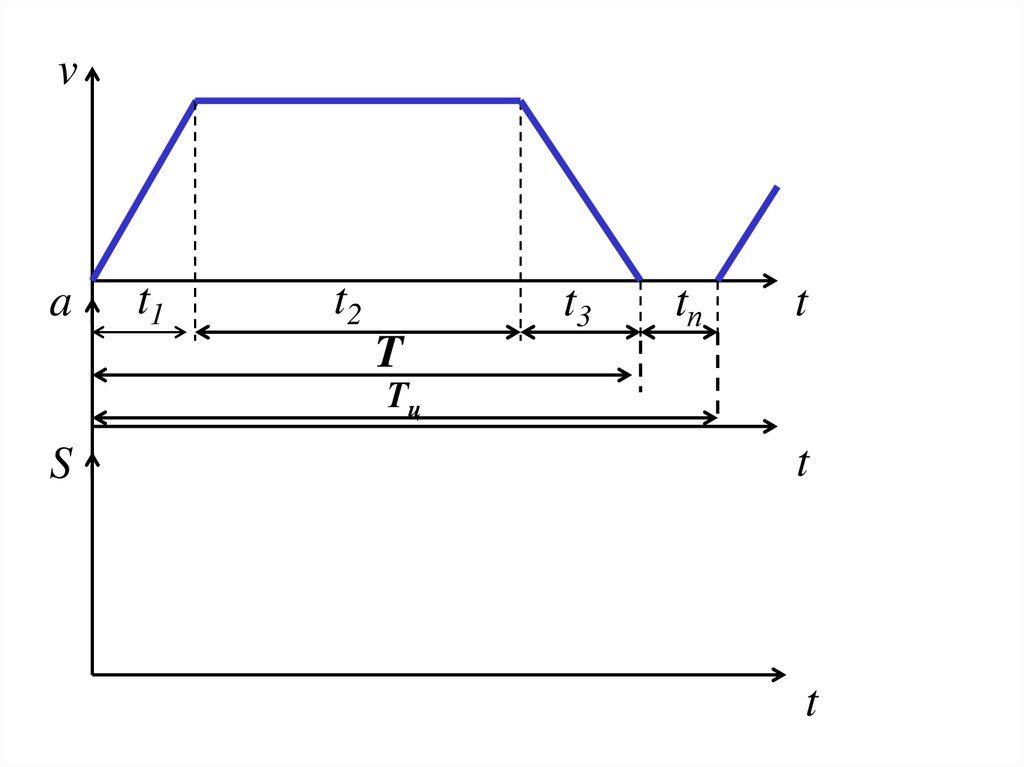
Работа ПУ носит циклический характер.
Графически это представляется на диаграммах
скорости, ускорения, перемещения.
3.
va
t1
t2
t3
tп
t
T
Тц
S
t
t
4.
va
t1
t2
t3
t
а1
S
а3
t
t
5.
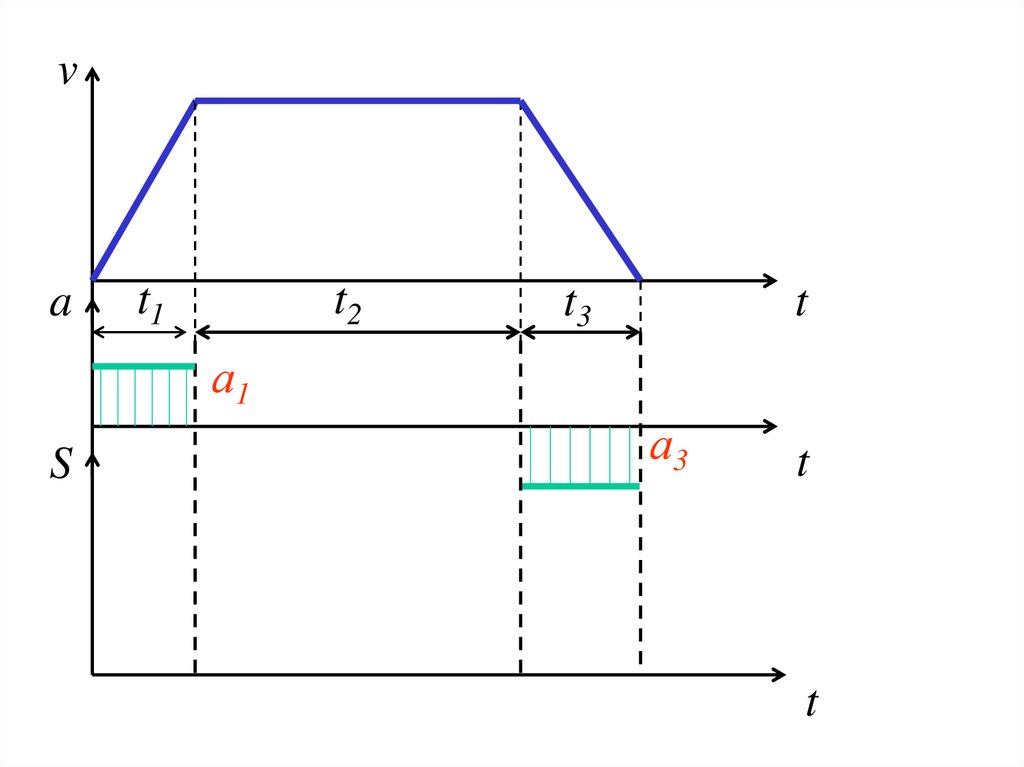
Определим путь, который проходит клетьза промежутки времени: t1, t2, t3.
2
Vmax t1
a1t1
h1
2
2
h2 Vmax t2
Vmax t3
h3
2
6.
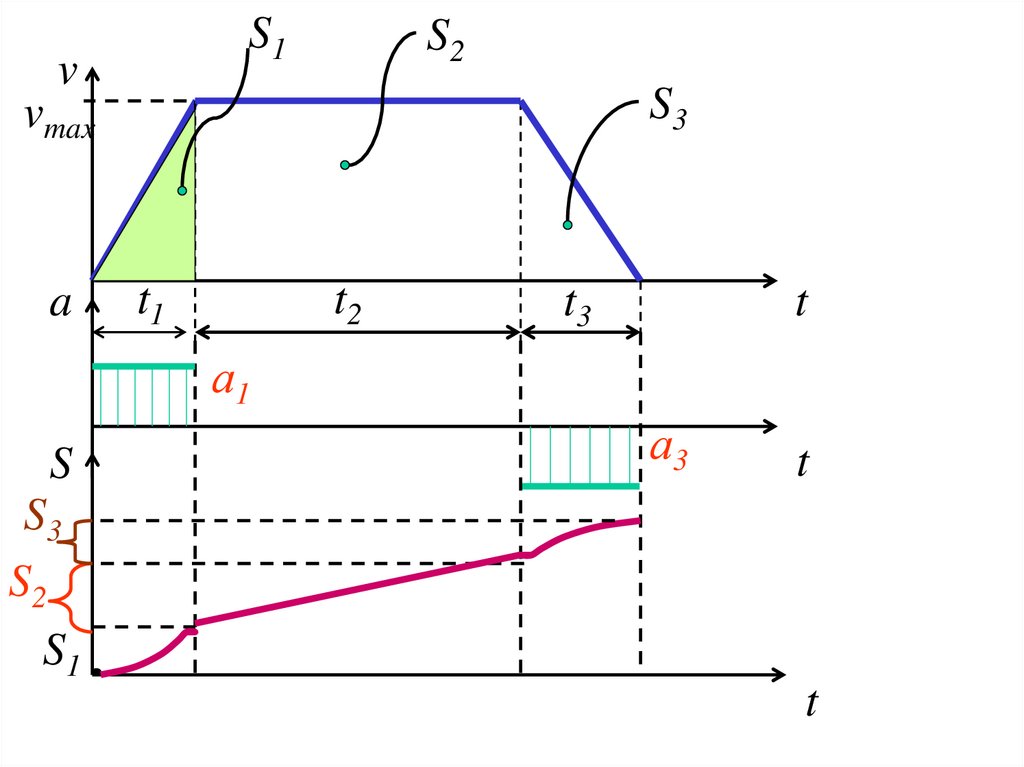
S1v
S2
S3
vmax
a
t1
t2
t3
t
а1
S
а3
t
S3
S2
S1
t
7.
При построении диаграмм скорости и ускорения известными являются величины Н и Т.Зная эти величины можно определить
Vср =Н/Т.
По значению Vср определяется Vmax = Vср,
где =1,1…..1,3 множитель скорости
а=Vmax/Vср
Определим диапазон изменения а.
8.
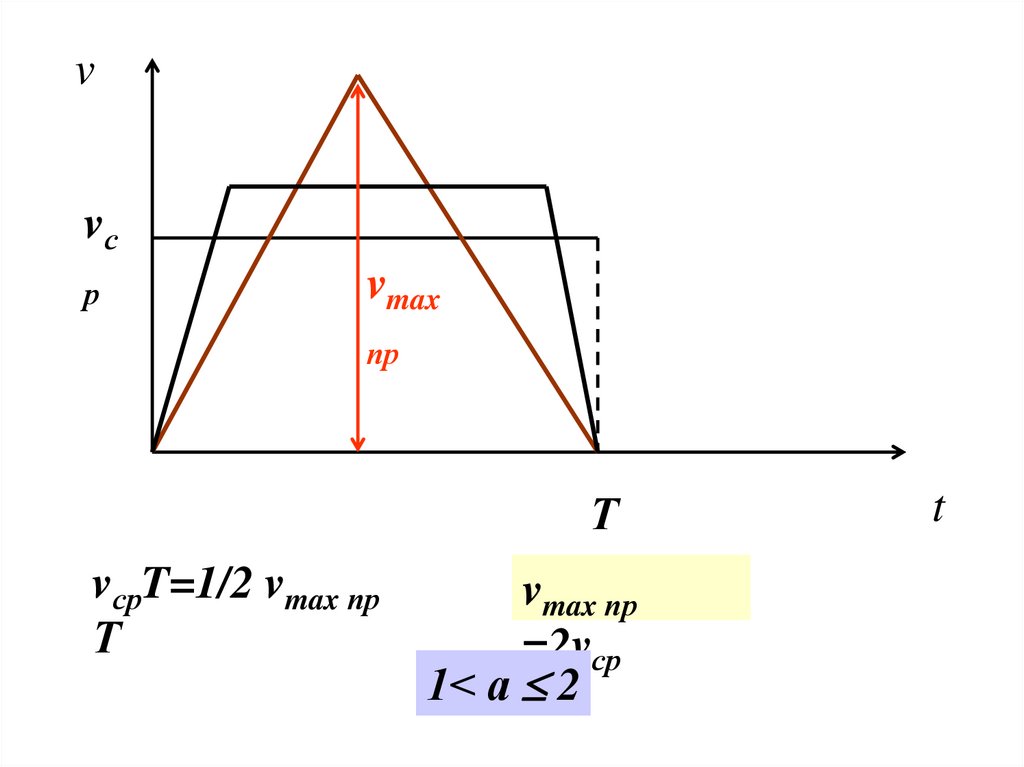
vvс
р
vmax
пр
Т
vсрT=1/2 vmax пр
Т
vmax пр
=2vср
1< а 2
t
9.
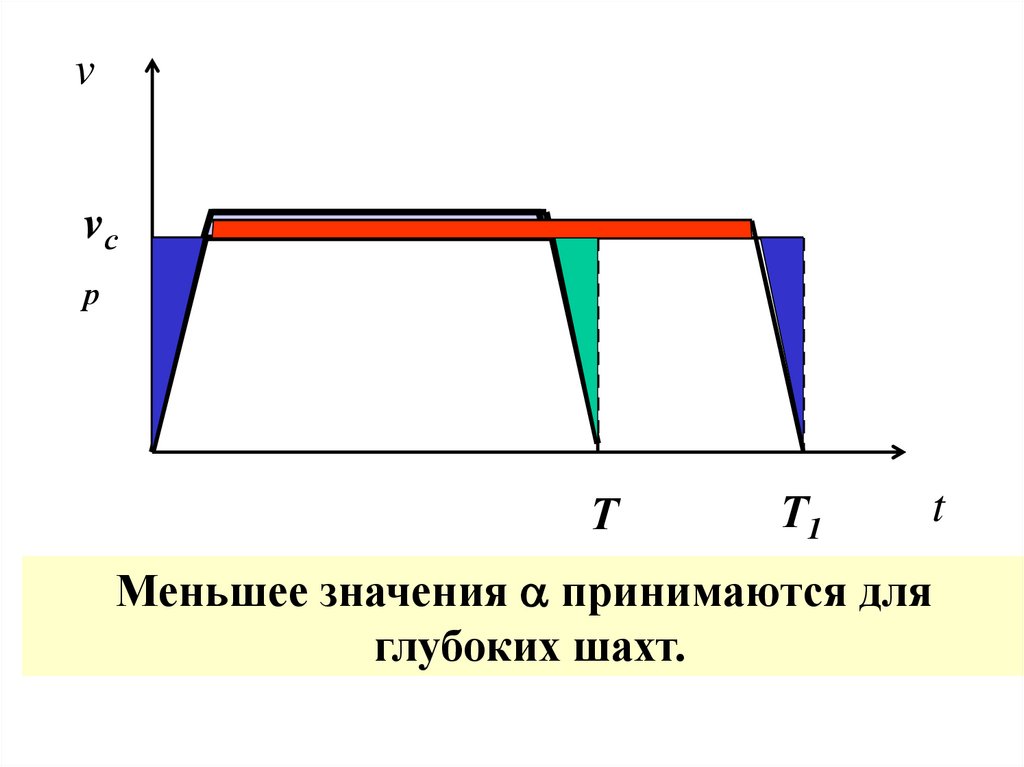
vvс
р
Т
Т1
t
Меньшее значения принимаются для
глубоких шахт.
10.
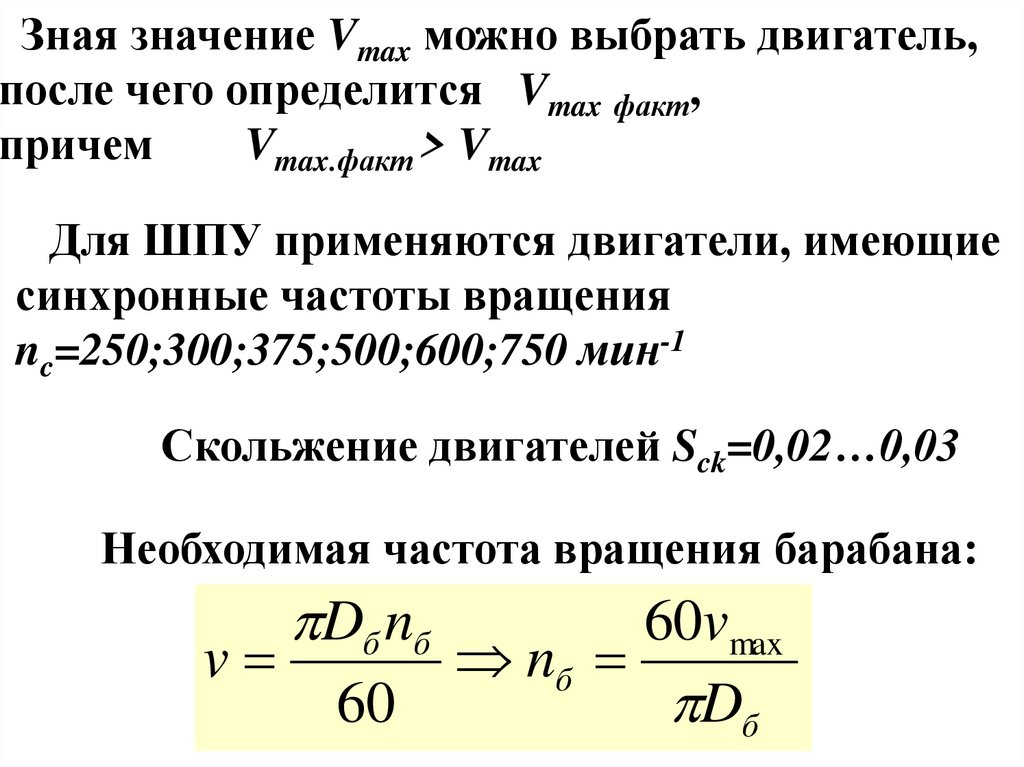
Зная значение Vmax можно выбрать двигатель,после чего определится Vmax факт,
причем
Vmax.факт > Vmax
Для ШПУ применяются двигатели, имеющие
синхронные частоты вращения
nc=250;300;375;500;600;750 мин-1
Скольжение двигателей Sck=0,02…0,03
Необходимая частота вращения барабана:
v
Dб nб
60
60vmax
nб
Dб
11.
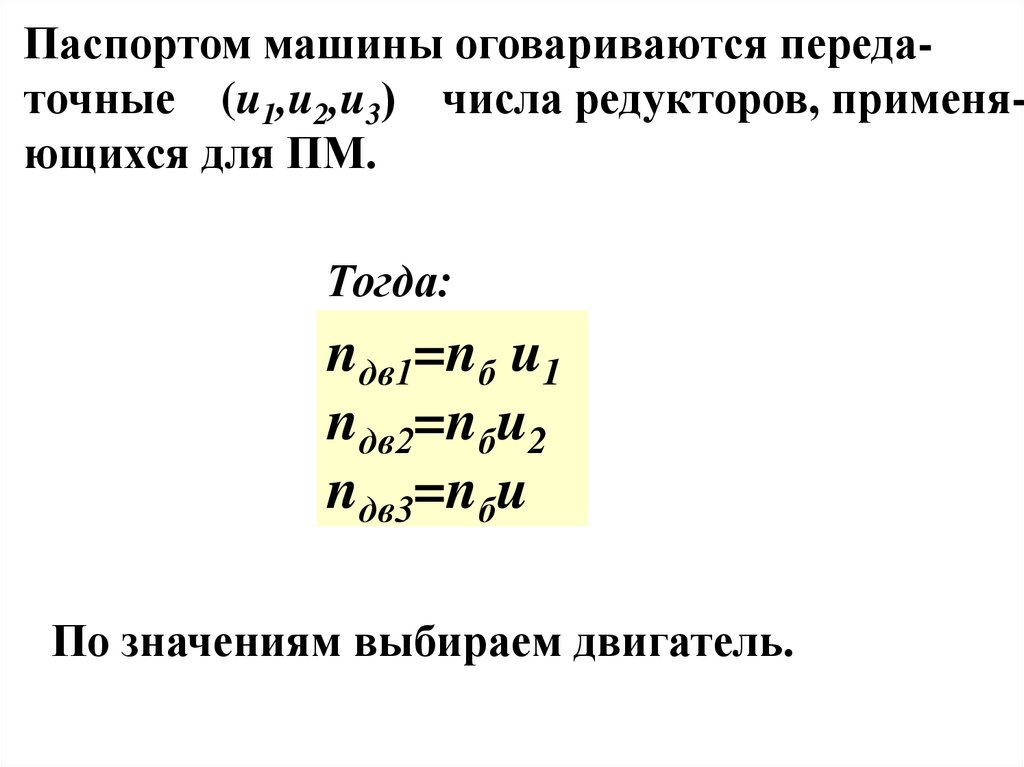
Паспортом машины оговариваются передаточные (u1,u2,u3) числа редукторов, применяющихся для ПМ.Тогда:
nдв1=nб u1
nдв2=nбu2
nдв3=nбu
По значениям выбираем двигатель.
12.
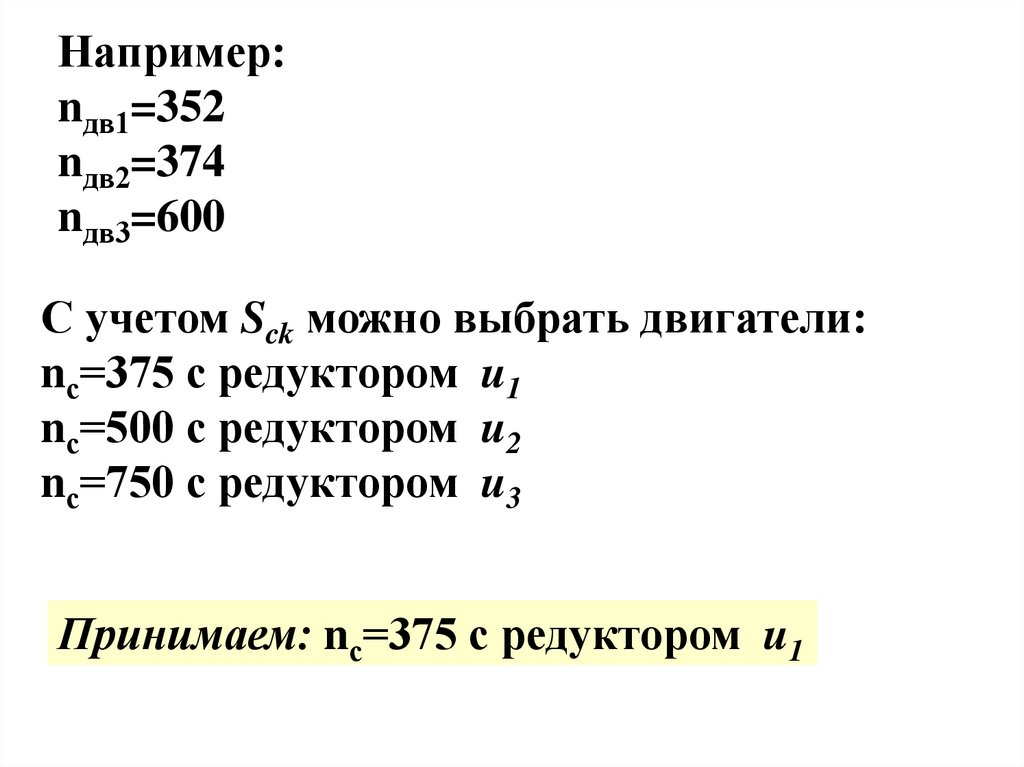
Например:nдв1=352
nдв2=374
nдв3=600
С учетом Sck можно выбрать двигатели:
nс=375 с редуктором u1
nс=500 с редуктором u2
nс=750 с редуктором u3
Принимаем: nс=375 с редуктором u1
13.
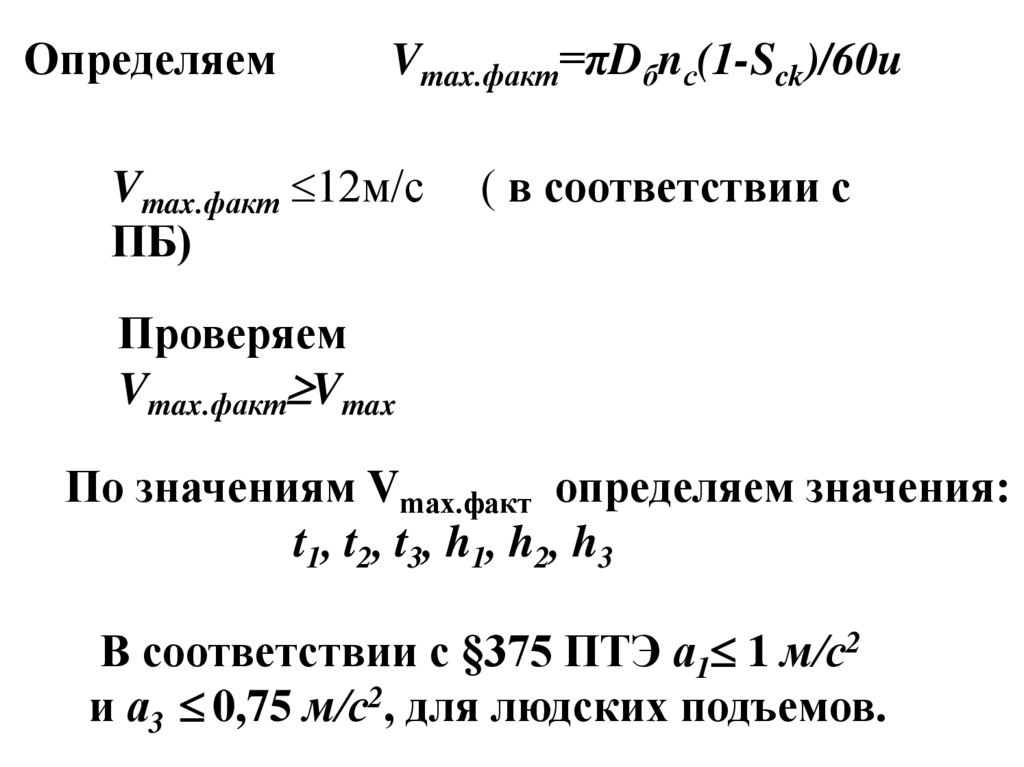
ОпределяемVmax.факт=πDбnс(1-Sck)/60u
Vmax.факт 12м/с
ПБ)
( в соответствии с
Проверяем
Vmax.факт Vmax
По значениям Vmax.факт определяем значения:
t1, t2, t3, h1, h2, h3
В соответствии с §375 ПТЭ а1 1 м/с2
и а3 0,75 м/с2, для людских подъемов.
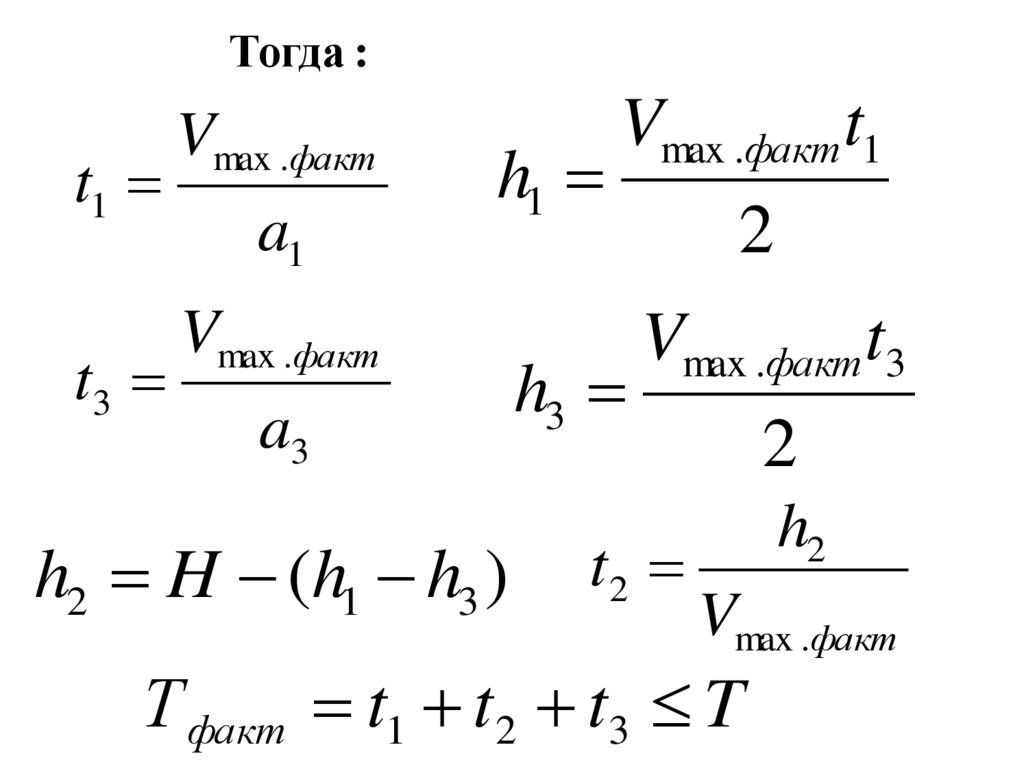
14.
Тогда :t1
Vmax .факт
t3
Vmax .факт
a1
h1
a3
h2 H (h1 h3 )
Vmax .факт t1
h3
2
Vmax .факт t3
t2
2
h2
Vmax .факт
Т факт t1 t 2 t3 T
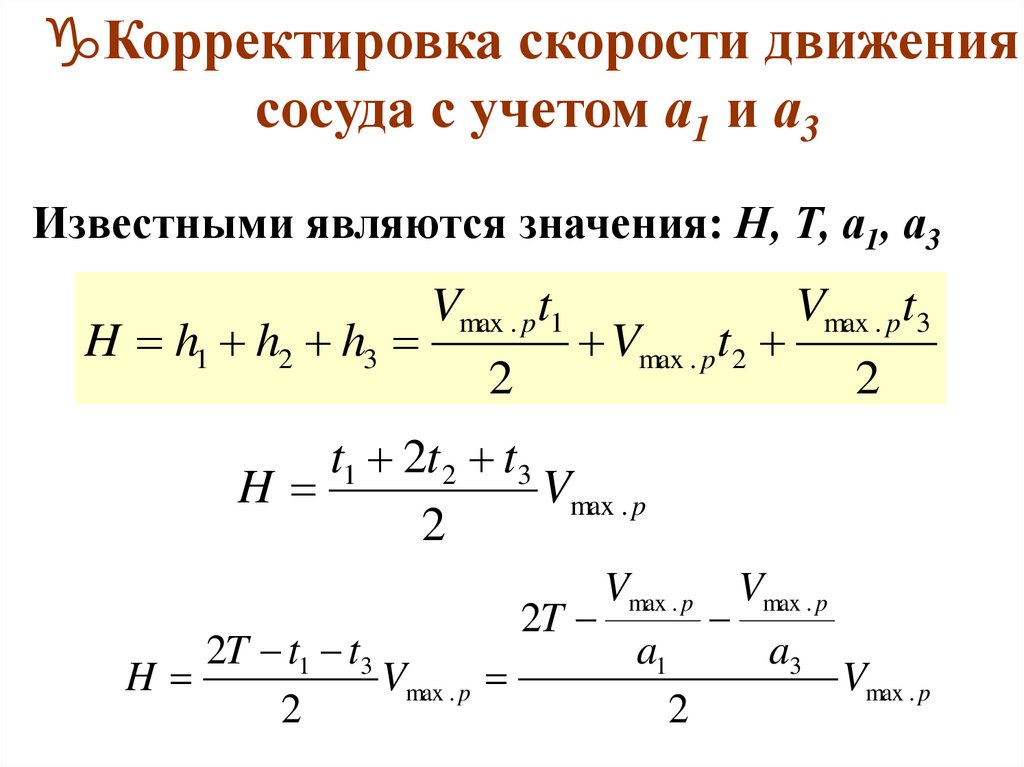
15.
Корректировка скорости движениясосуда с учетом а1 и а3
Известными являются значения: Н, Т, а1, а3
H h1 h2 h3
Vmax . p t1
2
Vmax . p t2
Vmax . p t3
2
t1 2t 2 t3
H
Vmax . p
2
Vmax . p Vmax . p
2T
2T t1 t3
a1
a3
H
Vmax . p
Vmax . p
2
2
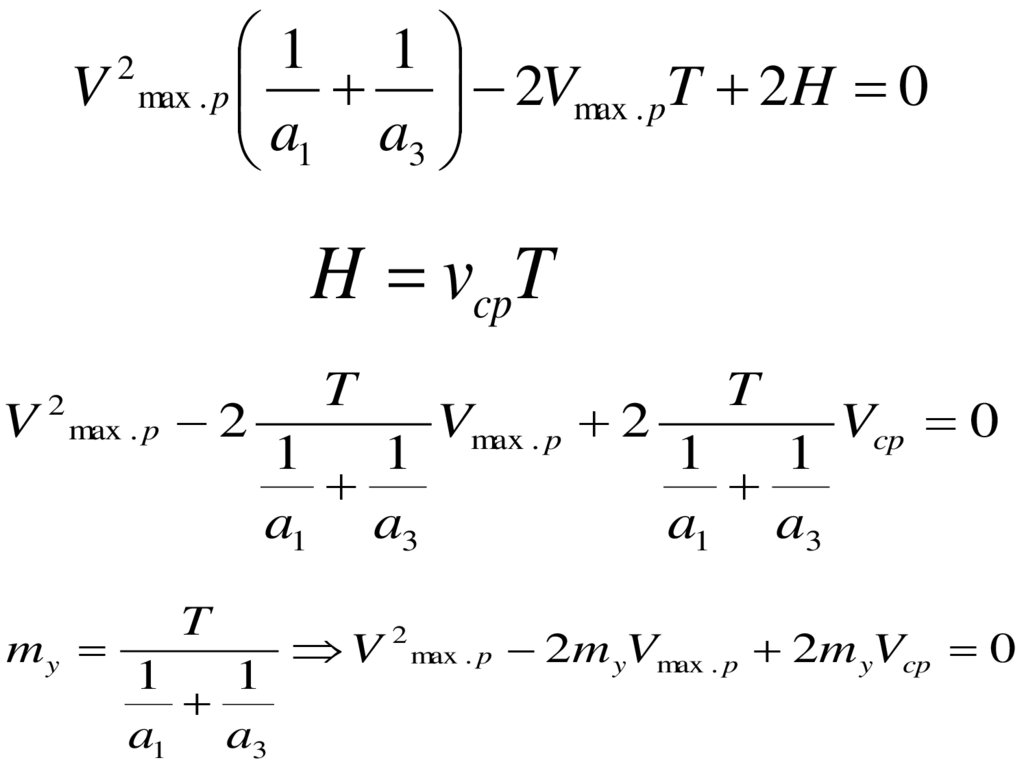
16.
1 1V max . p 2Vmax . pT 2 H 0
a1 a3
2
H vcpT
V max . p 2
T
2
my
1
1
a1 a3
T
1
1
a1 a3
Vmax . p 2
T
1
1
a1 a3
Vcp 0
V max . p 2m yVmax . p 2m yVcp 0
2
17.
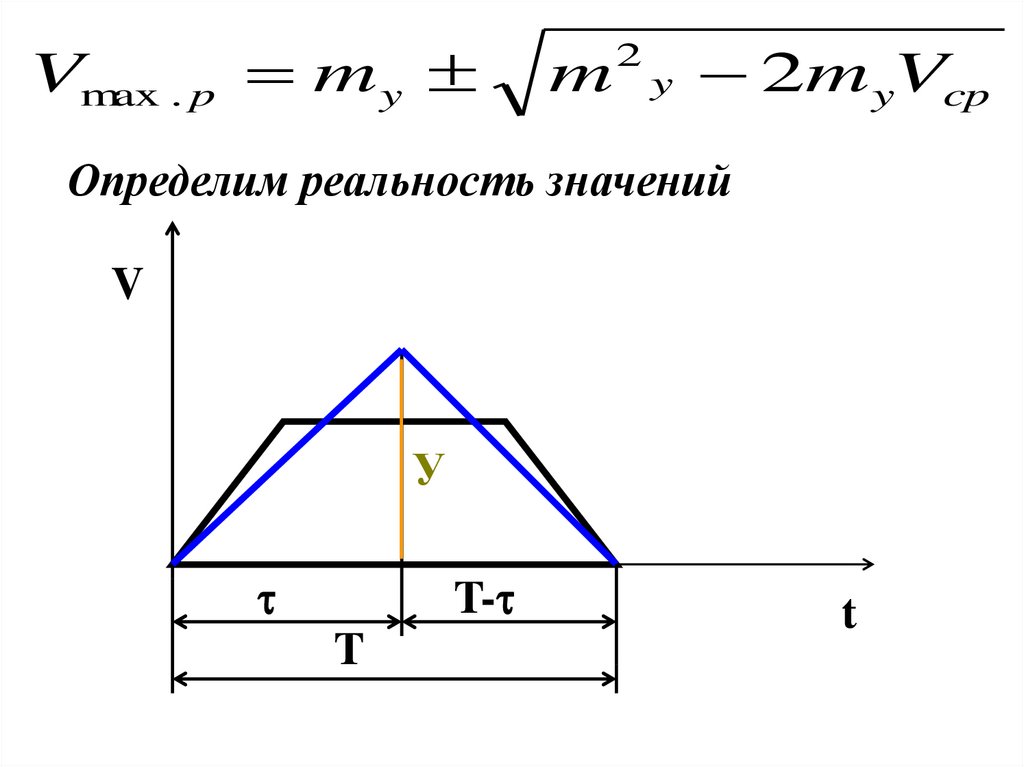
Vmax . p m ym y 2m yVcp
2
Определим реальность значений
V
У
T-
T
t
18.
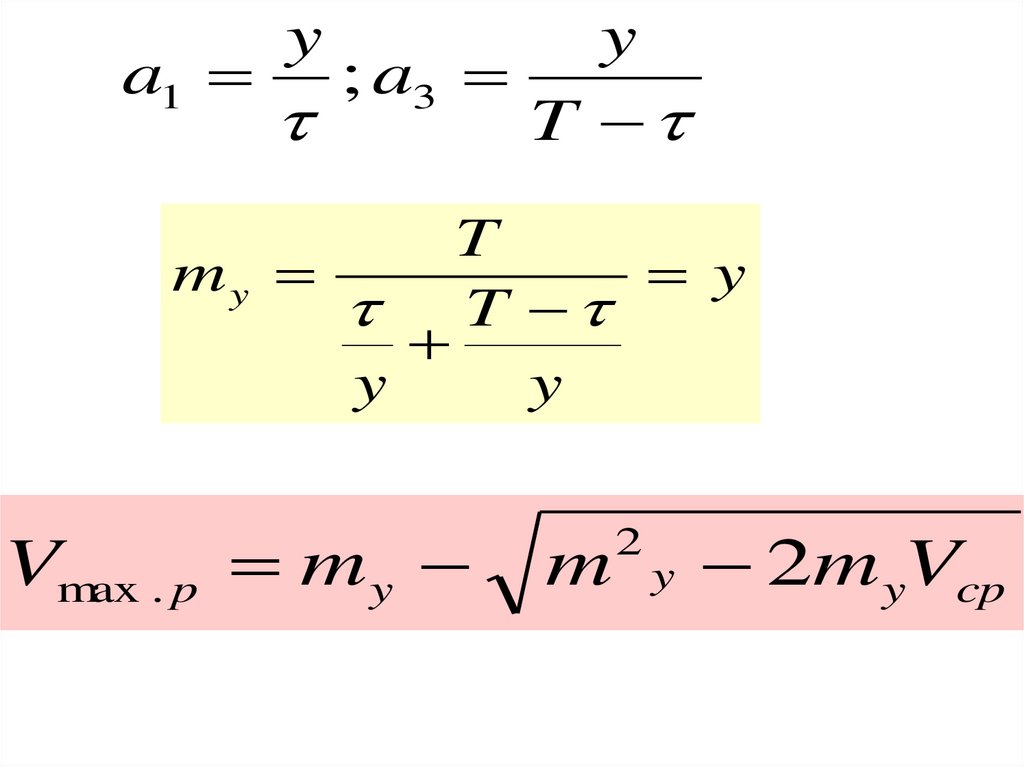
yy
a1 ; a3
T
T
my
y
T
y
y
Vmax . p m y
m y 2m yVcp
2
19.
Диаграмма скорости и ускорениядвухконцевых скиповых подъемных установок.
Будем рассматривать диаграммы применительно к скипам c разгрузкой через дно и
секторный затвор.
Неавтоматизированная скиповая ПУ
Правилами технической эксплуатациии
ограничивается максимальная скорость выхода
скипа из разгрузочных кривых v0’=1,5м/с и
входа в разгрузочные кривые v0''=1,5м/с .
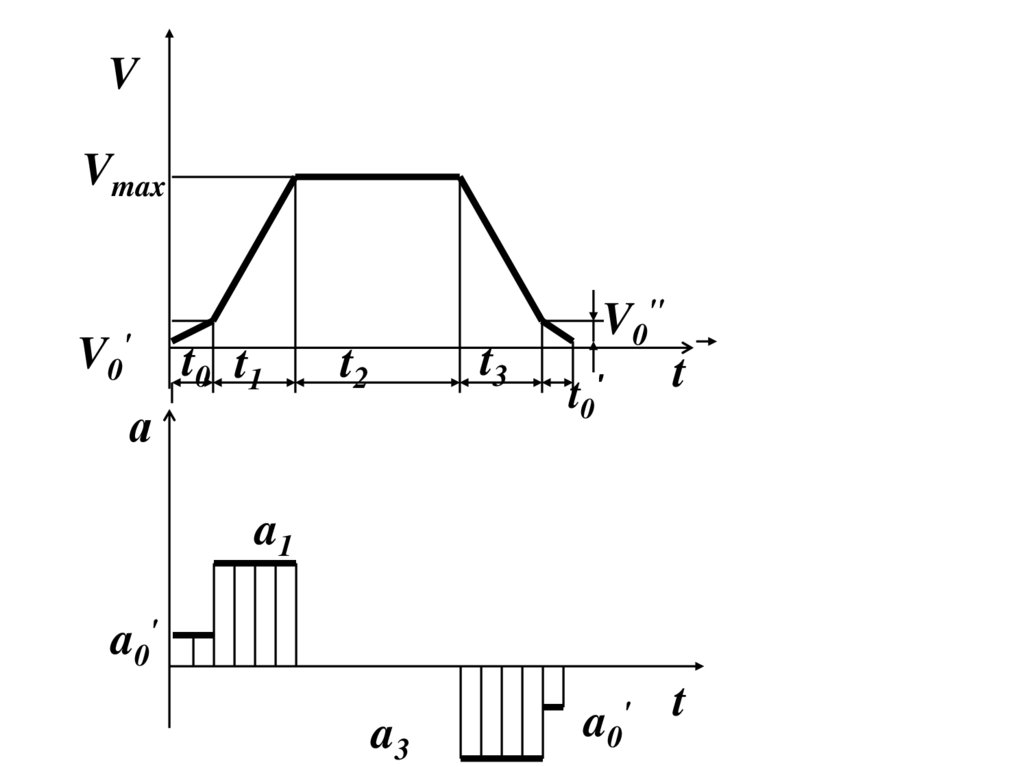
20.
VVmax
V0'
t0 t1
t3
t2
а
V0''
t0'
t
a0'
t
a1
a0'
a3
21.
t0 - время движения скипа в разгрузочныхкривых определяется длиной разгрузочных
кривых.
Путь проходимый скипом в разгрузочных
кривых h0’ и h0’ ’ задается конструкцией .
Поскольку в настоящее время применяются
автоматизированные скиповые подъемные
установки, то расчет диаграмм скорости и
ускорения в данном случае выполнять не будем.
22.
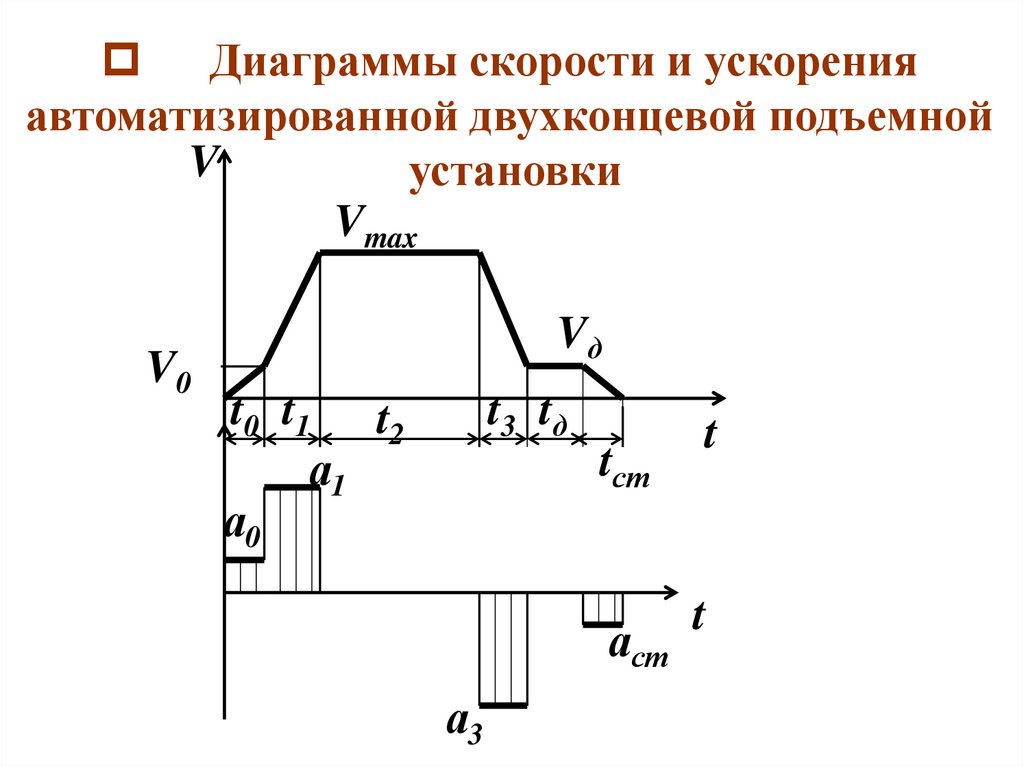
Диаграммы скорости и ускоренияавтоматизированной двухконцевой подъемной
V
установки
Vmax
V0
Vд
t0 t1 t2
а1
а0
t3 tд
tст
аст
а3
t
t
23.
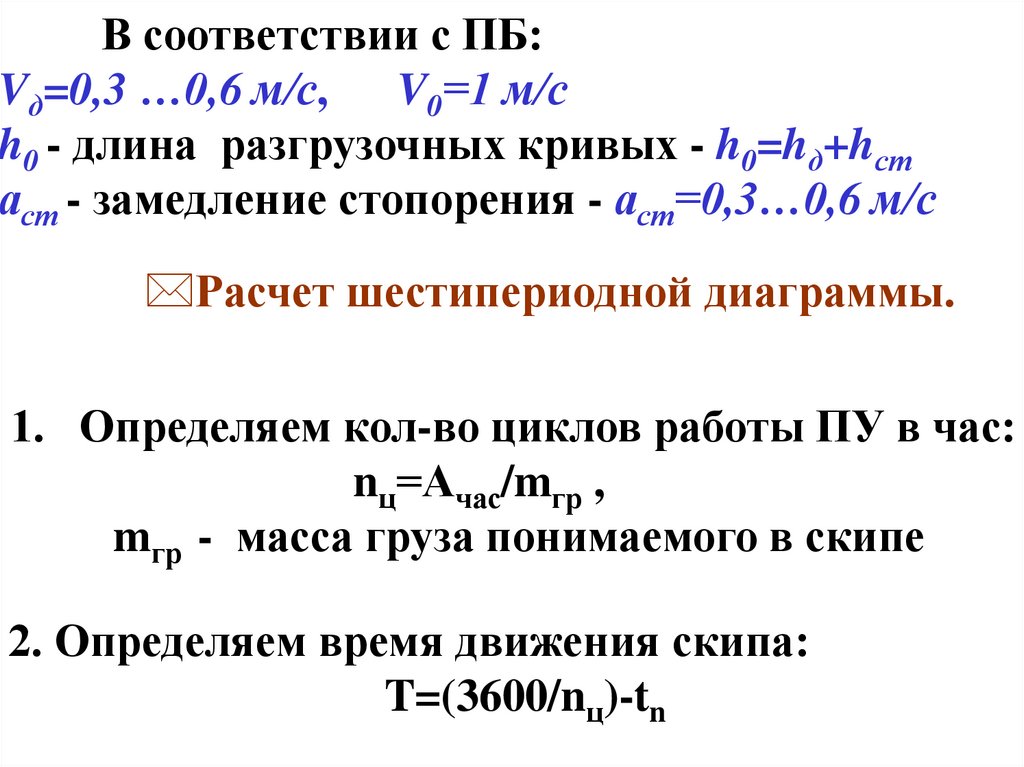
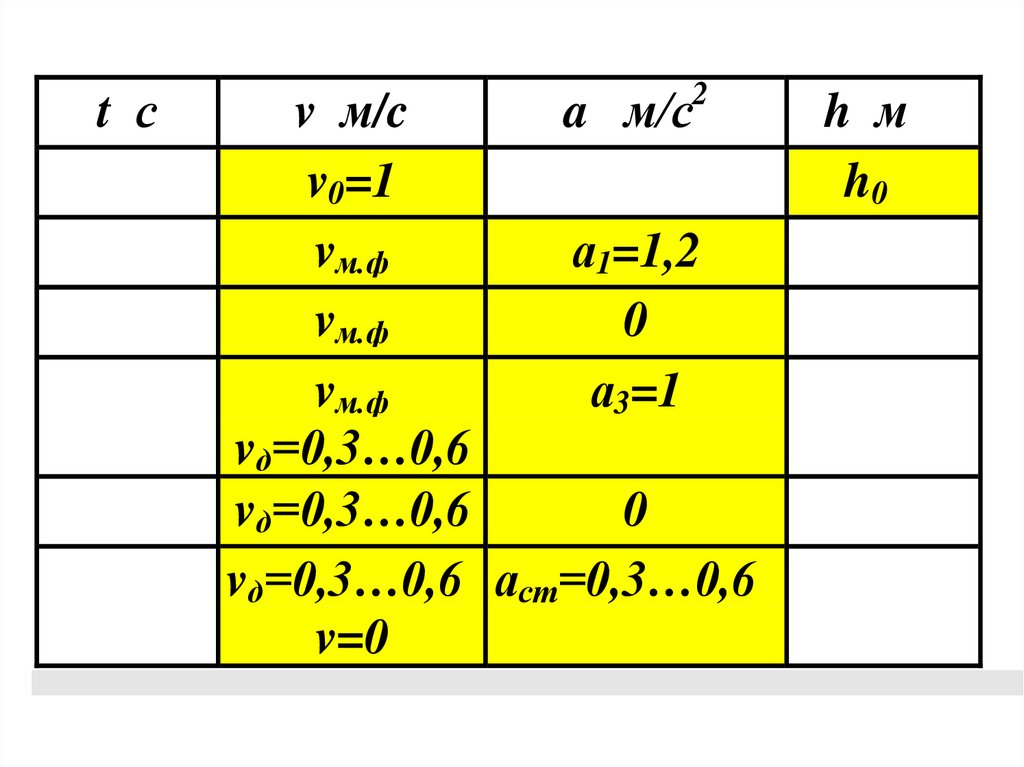
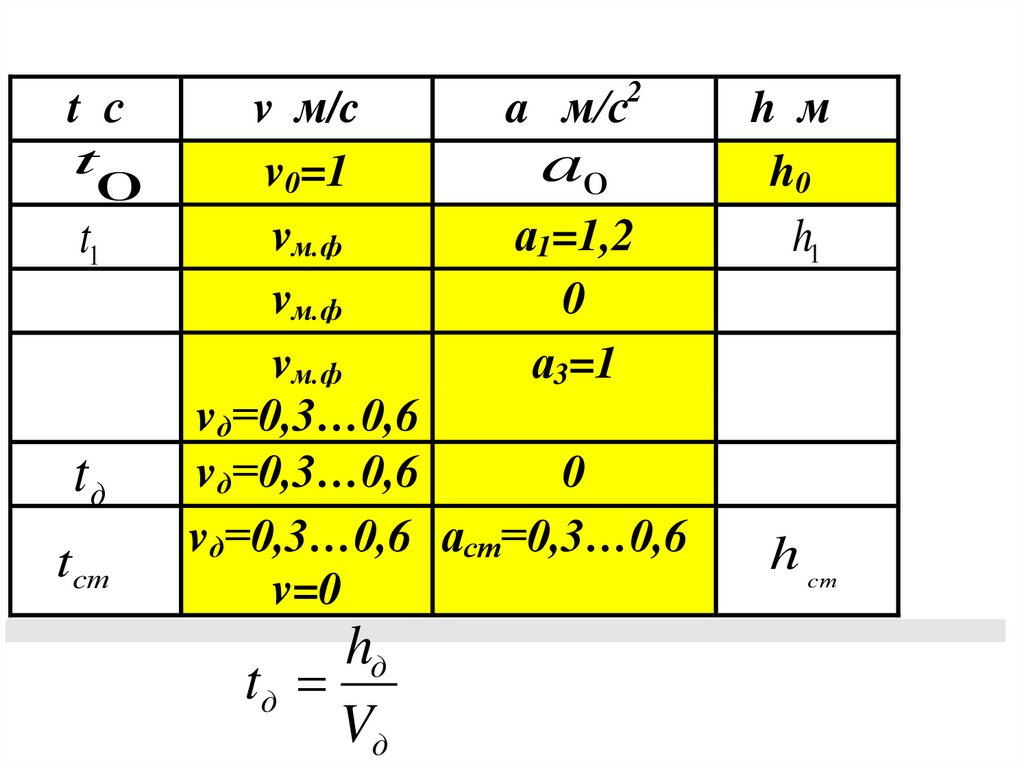
В соответствии с ПБ:Vд=0,3 …0,6 м/с, V0=1 м/c
h0 - длина разгрузочных кривых - h0=hд+hст
аст - замедление стопорения - аст=0,3…0,6 м/с
Расчет шестипериодной диаграммы.
1. Определяем кол-во циклов работы ПУ в час:
nц=Ачас/mгр ,
mгр - масса груза понимаемого в скипе
2. Определяем время движения скипа:
T=(3600/nц)-tn
24.
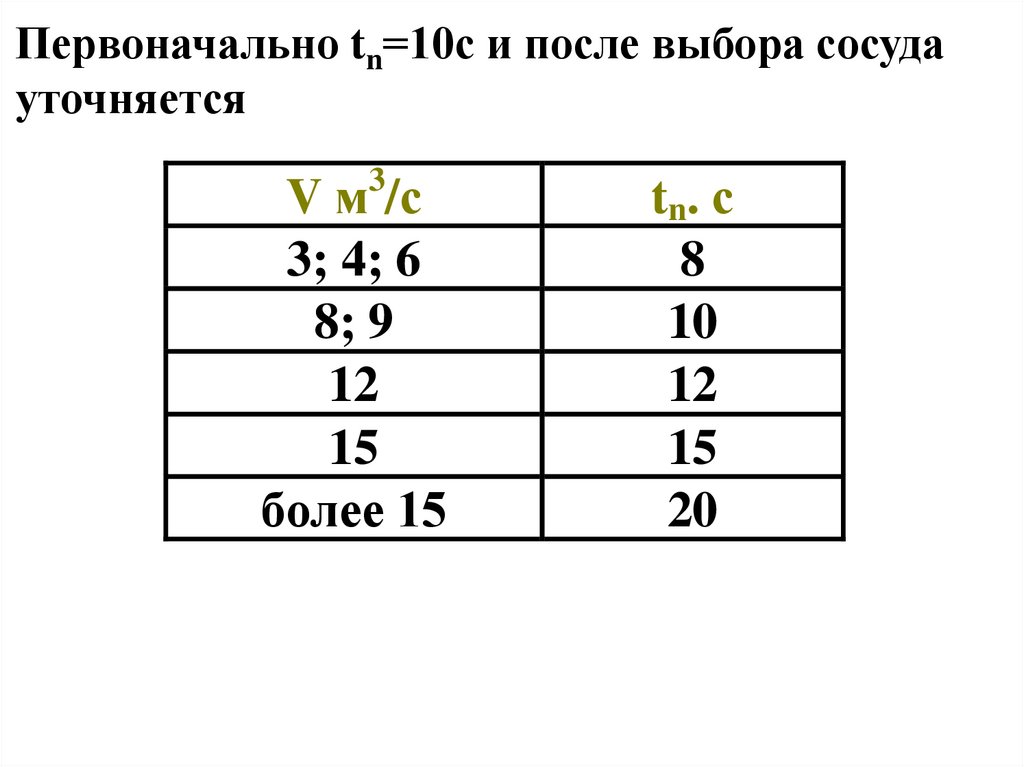
Первоначально tn=10c и после выбора сосудауточняется
3
V м /с
3; 4; 6
8; 9
12
15
более 15
tn. с
8
10
12
15
20
25.
3. Определяем среднею скорость движения скипа:Vcр= H/T
4. Определяем максимальную скорость и
осуществляем ее корректировку:
Vmax= Vcр
( =1,2…1,25)
5. Определяем остальные параметры движения
скипа:
26.
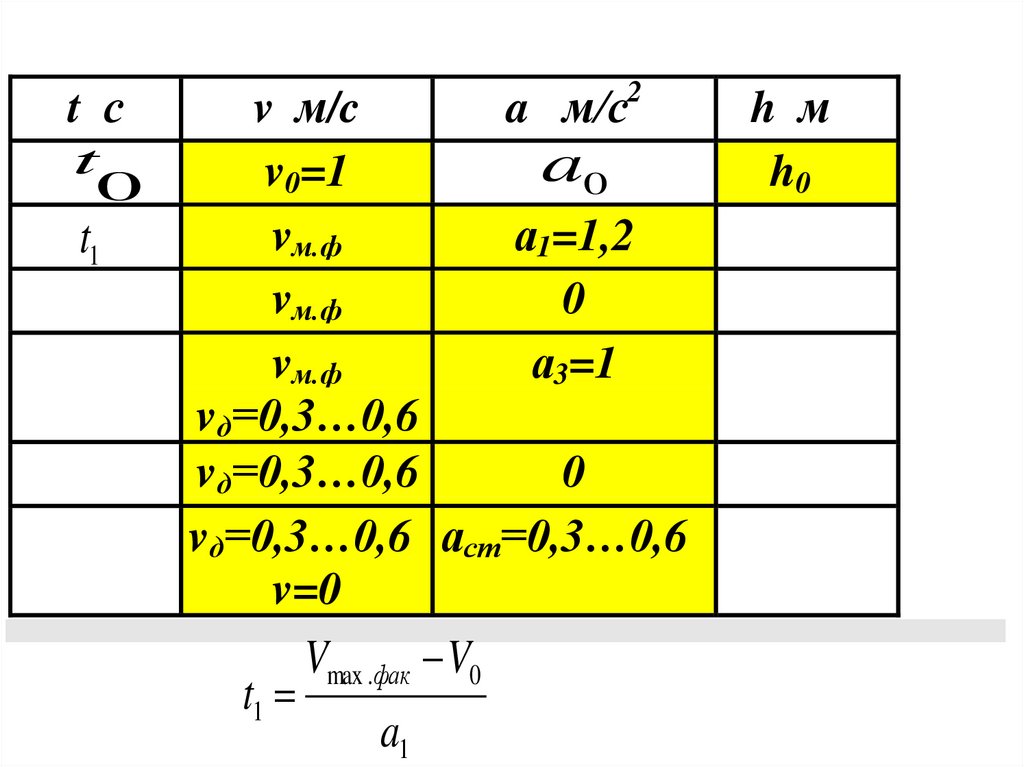
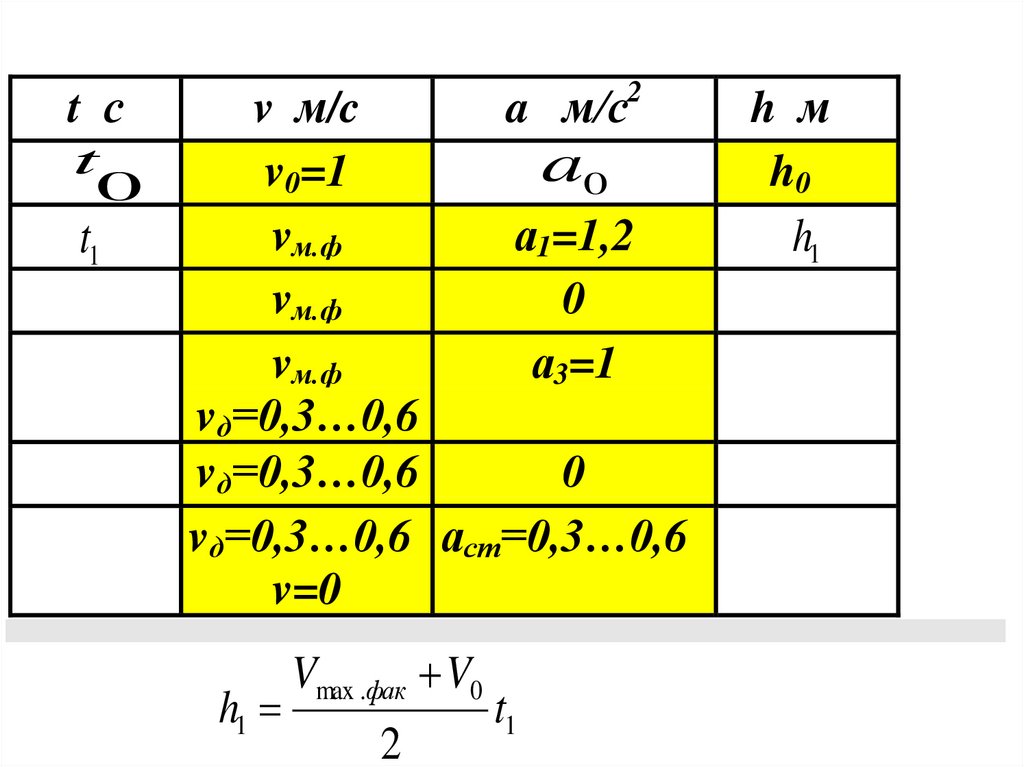
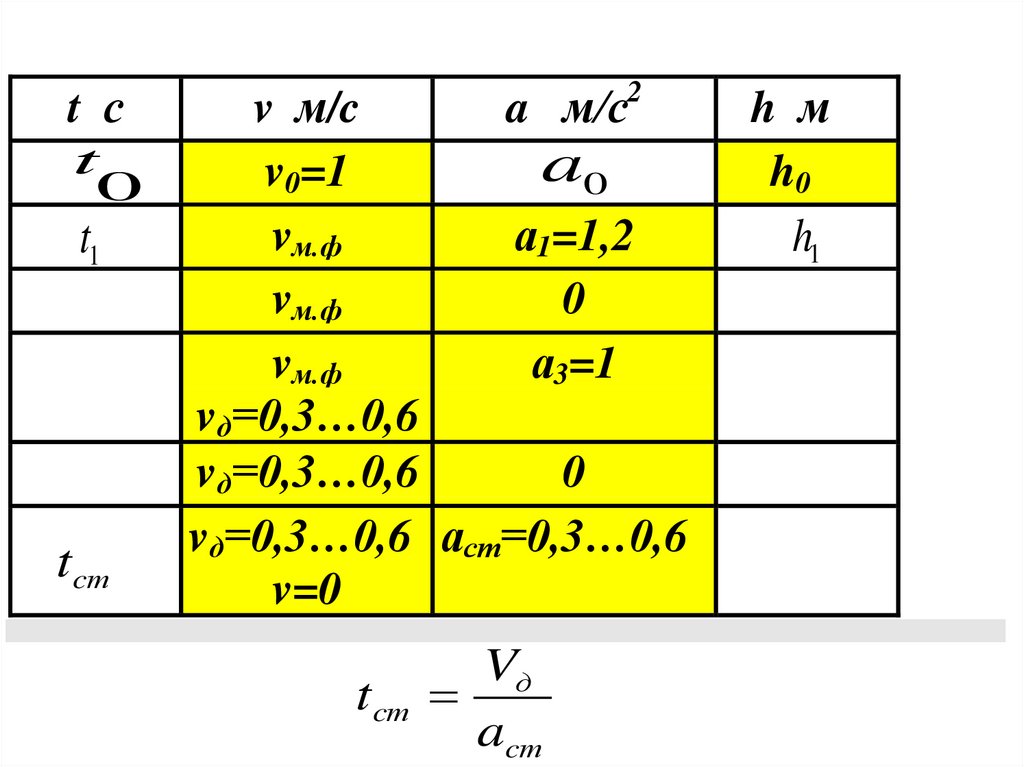
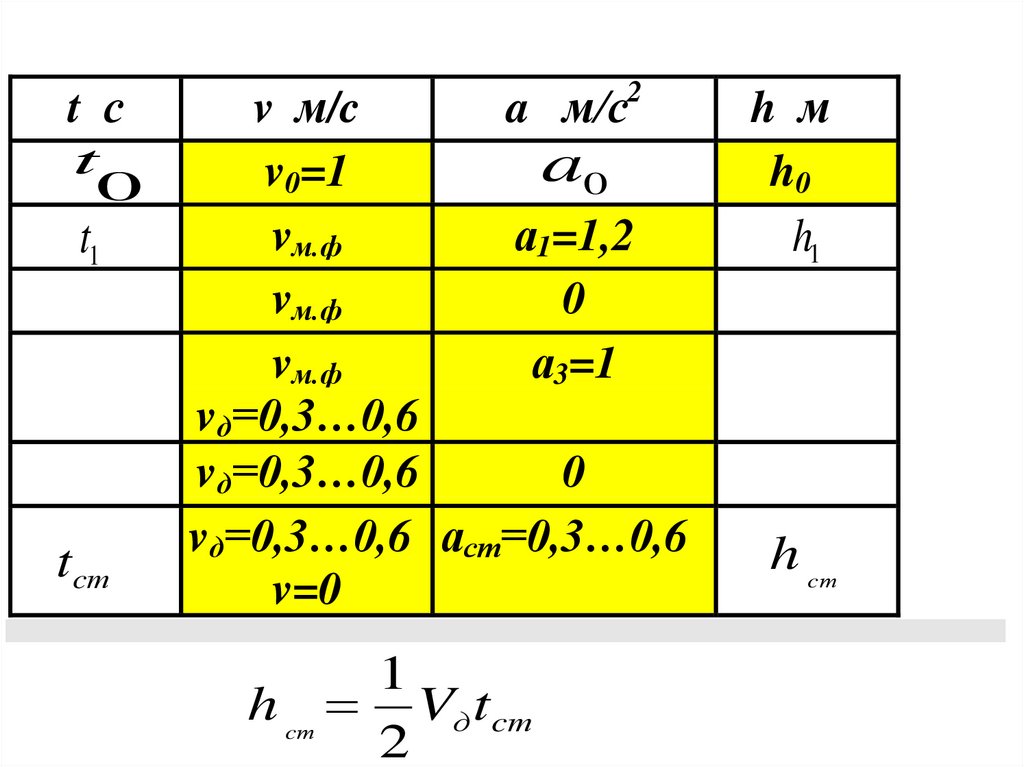
t с2
v м/c
a м/с
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
h м
h0
27.
t сt
0
v м/c
a м/с2
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
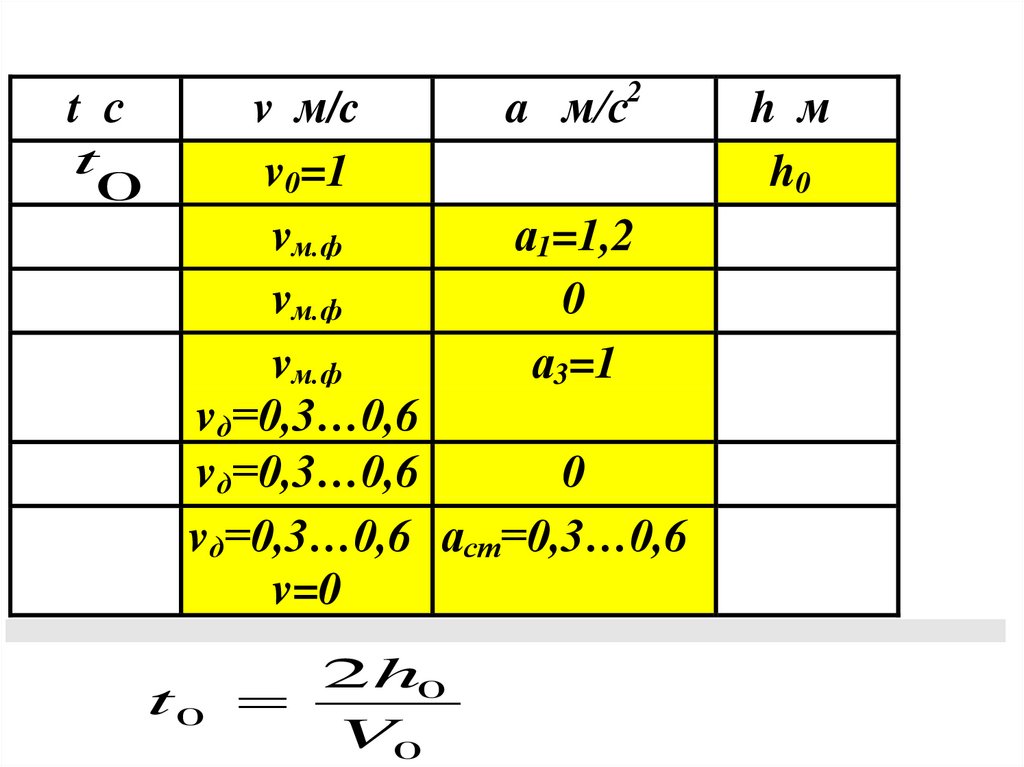
t0
2 h0
V0
h м
h0
28.
t сt
0
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
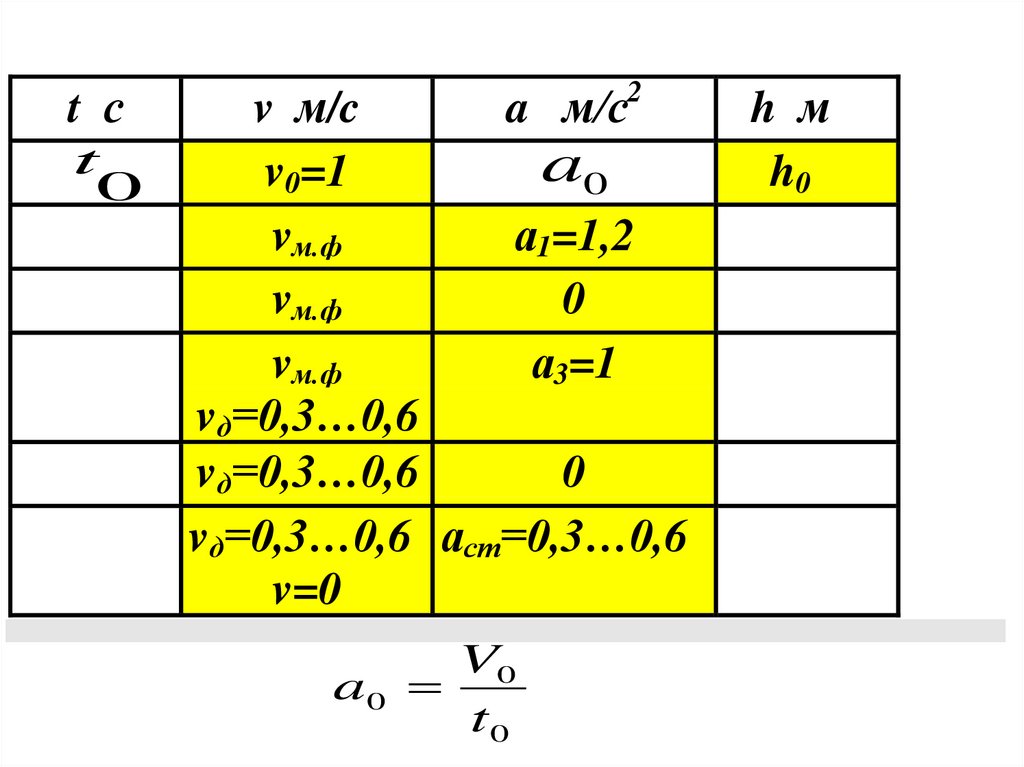
V0
a0
t0
h м
h0
29.
t сt
0
t1
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
t1
Vmax .фак V0
a1
h м
h0
30.
t сt
0
t1
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
h1
Vmax .фак V0
2
t1
h м
h0
h1
31.
t сt
0
t1
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
Vд
tcт
acт
h м
h0
h1
32.
t сt
0
t1
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
1
h cт Vд t cт
2
h м
h0
h1
h cт
33.
t сt
0
t1
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
hд
tд
Vд
h м
h0
h1
h cт
34.
t сt
0
t1
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
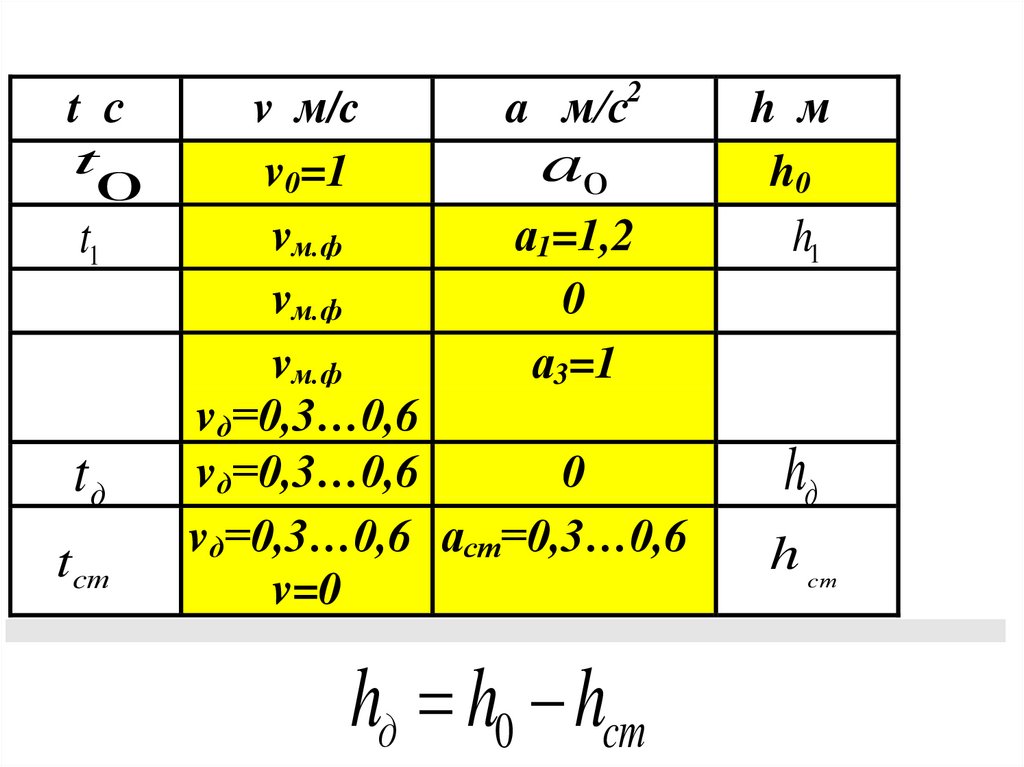
hд h0 hcт
h м
h0
h1
hд
h cт
35.
t сt
0
t1
t3
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
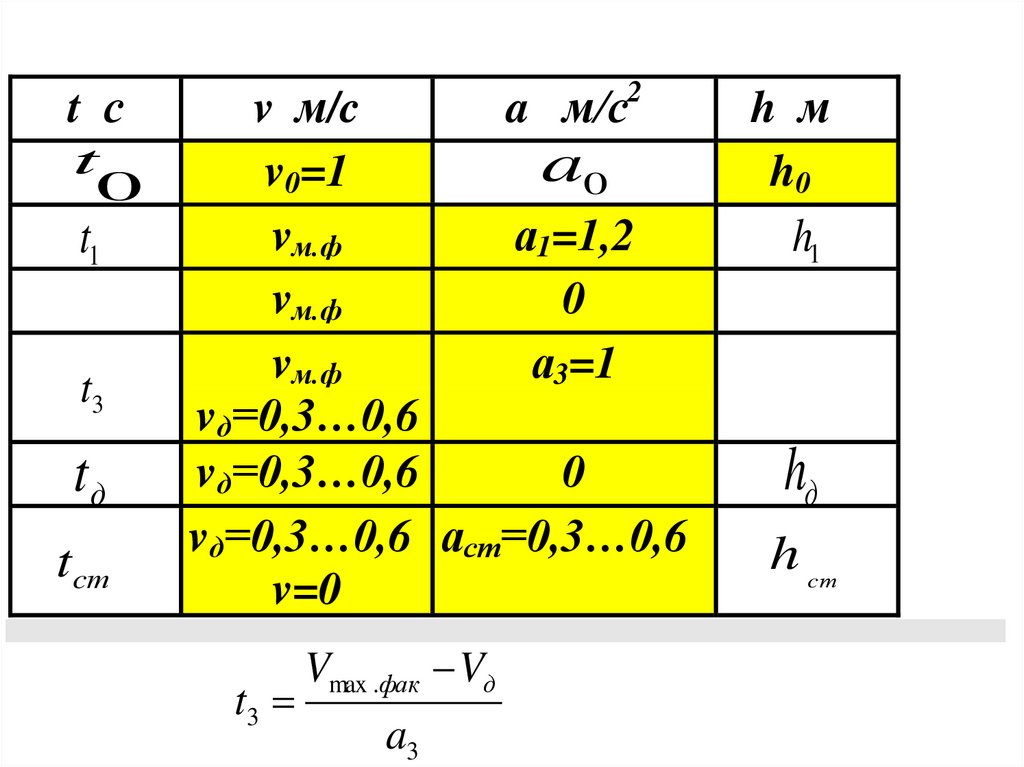
t3
Vmax .фак Vд
a3
h м
h0
h1
hд
h cт
36.
t сt
0
t1
t3
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
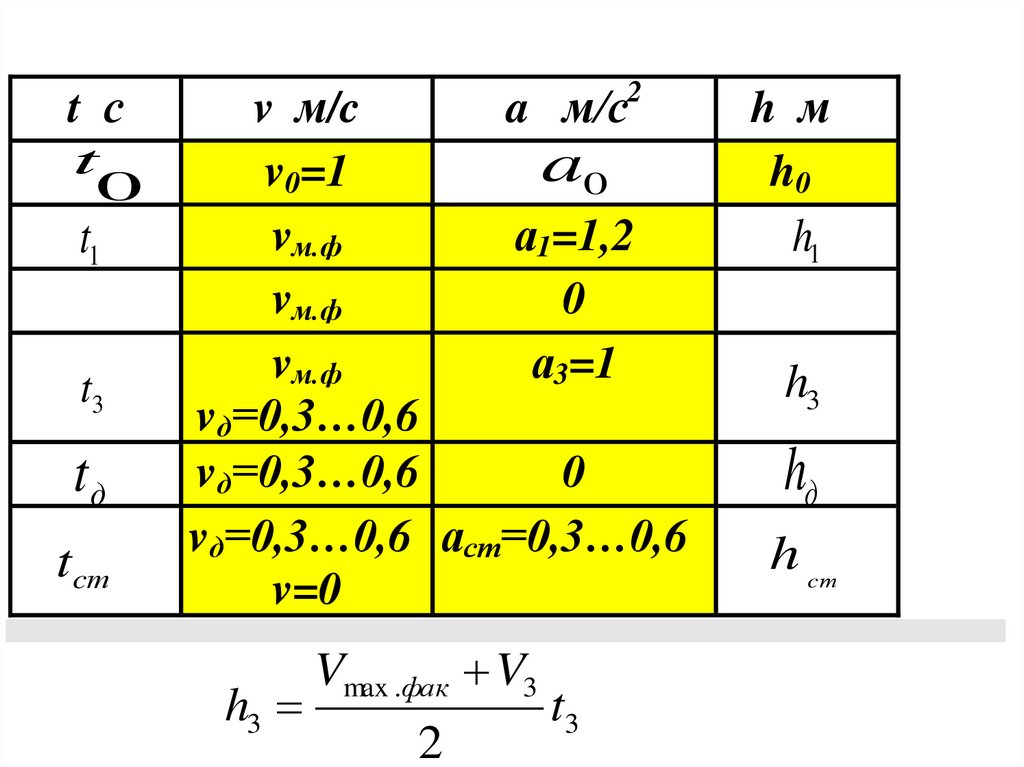
h3
Vmax .фак V3
2
t3
h м
h0
h1
h3
hд
h cт
37.
t сt
0
t1
t3
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
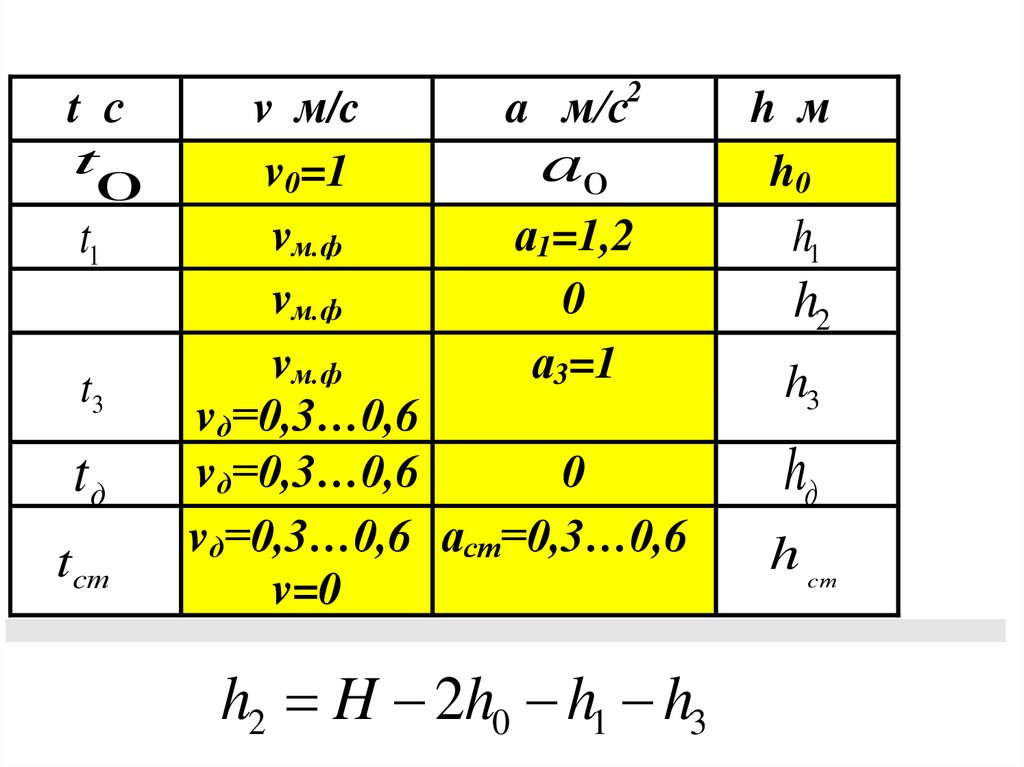
h2 H 2h0 h1 h3
h м
h0
h1
h2
h3
hд
h cт
38.
t сt
0
t1
t2
t3
tд
t cт
v м/c
a м/с2
a0
v0=1
vм.ф
а1=1,2
vм.ф
0
vм.ф
а3=1
vд=0,3…0,6
vд=0,3…0,6
0
vд=0,3…0,6 аст=0,3…0,6
v=0
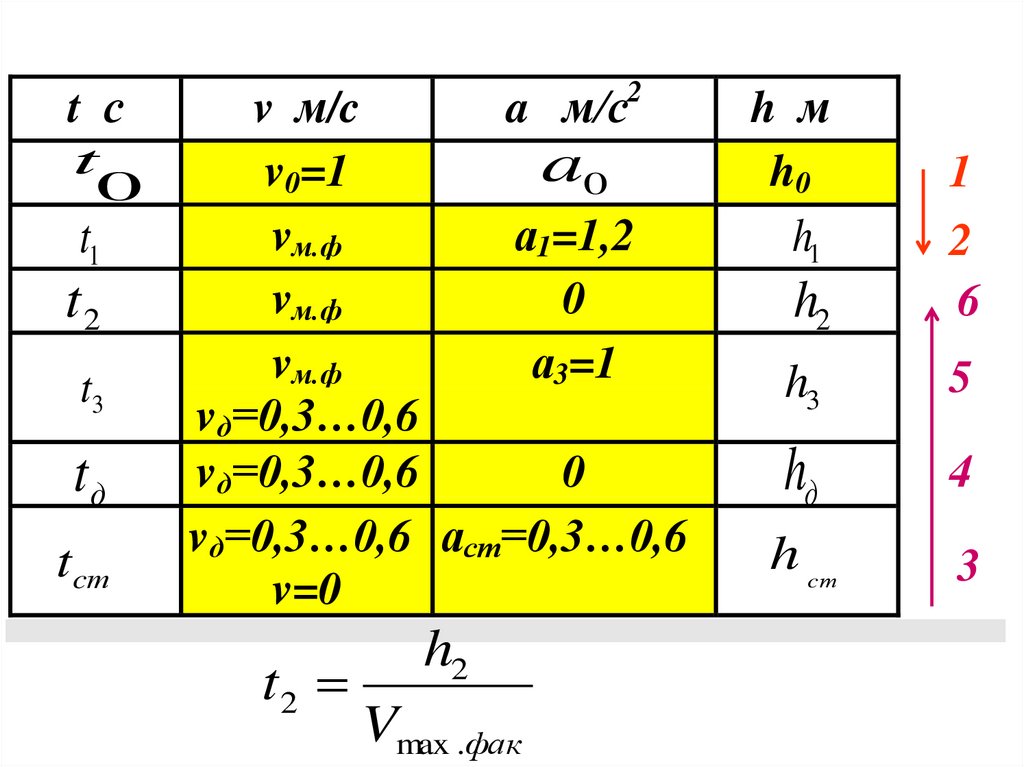
t2
h2
Vmax .фак
h м
h0
h1
h2
1
2
6
h3
5
hд
4
h cт
3
39.
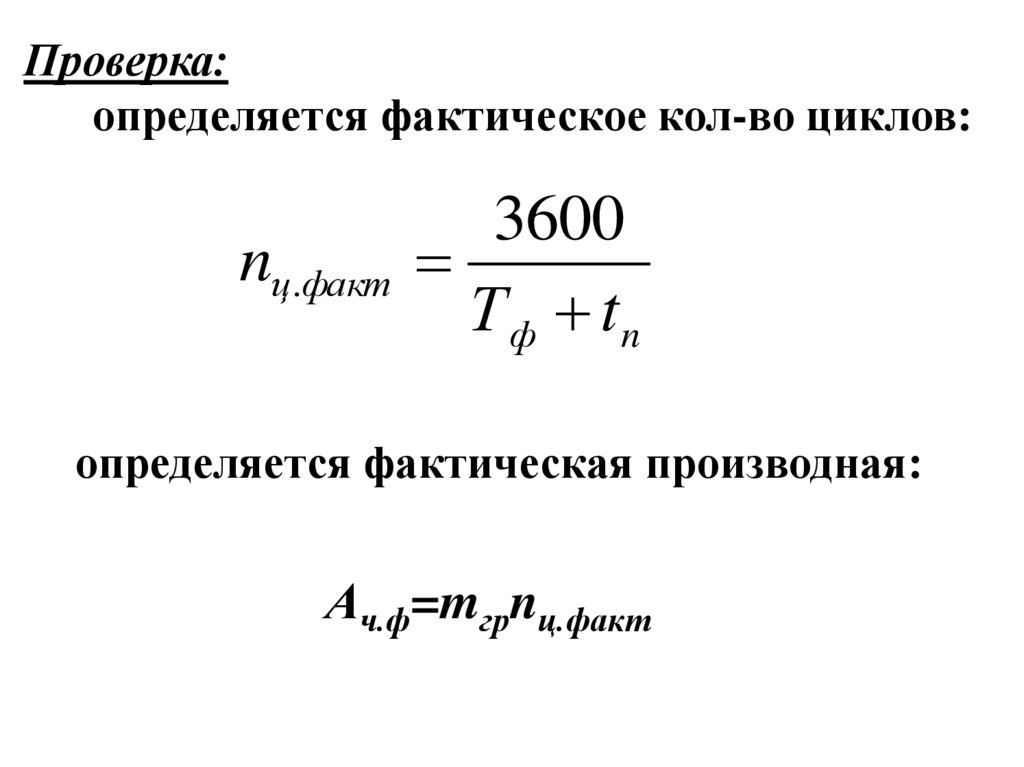
Проверка:определяется фактическое кол-во циклов:
3600
nц.факт
Т ф tn
определяется фактическая производная:
Ач.ф=mгрnц.факт
40.
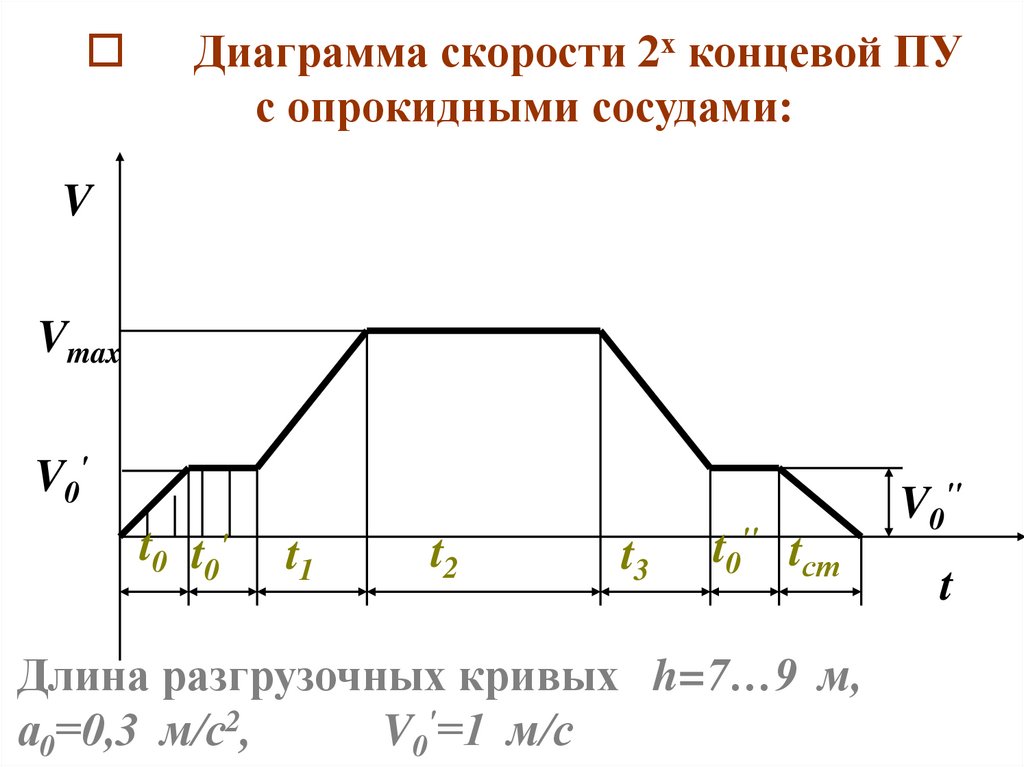
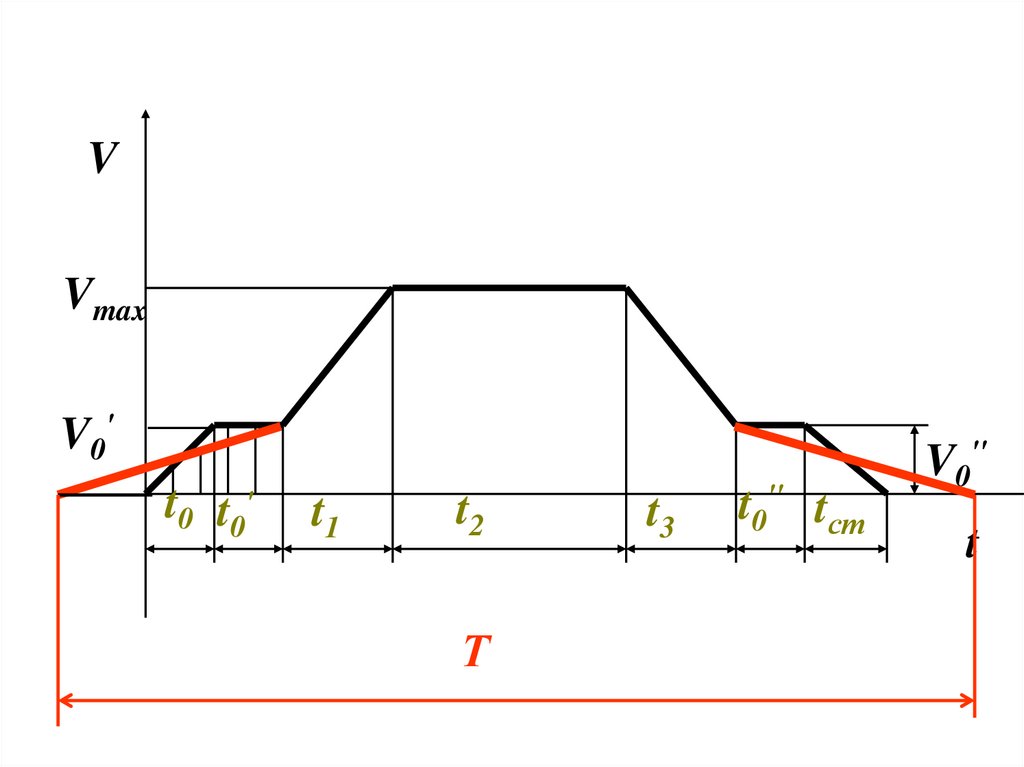
Диаграмма скорости 2х концевой ПУс опрокидными сосудами:
V
Vmax
V0'
t0 t0'
t1
t2
t3
t0'' tст
Длина разгрузочных кривых h=7…9 м,
а0=0,3 м/c2,
V0'=1 м/c
V0''
t
41.
VVmax
V0'
t0 t0'
t1
t2
Т
t3
t0'' tст
V0''
t