










 Электроника
ЭлектроникаПохожие презентации:






")



Автоматизация первичной обработки РЛИ
1.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙУНИВЕРСИТЕТ
Военный учебный центр
ОСНОВЫ ОБРАБОТКИ И ПЕРЕДАЧИ
ИНФОРМАЦИИ В АСУ
Тема № 1. Автоматизация первичной
обработки РЛИ
Занятие № 9. Автоматическое обнаружение
воздушных объектов
Руководитель занятия:
преподаватель кафедры АСУ ВКС
майор запаса Бейльман С.В.
2.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТУчебные вопросы:
1. Статистические характеристики последовательности
дискретно-квантового сигнала (ДКС).
2. Алгоритмы обнаружения цели по пачке ДКС.
3. Принцип автоматической обработки эхо-сигналов в УПО
КСА РТВ без дискретизации по времени. Кодирование
информации о координатах ЛО.
2
3.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТЛитература
1. В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы
обработки
и
передачи
информации
в
автоматизированных системах управления. Часть I
Первичная обработка радиолокационной информации.
– Красноярск: СФУ ВУЦ, 2020 – С. 134-142;155 - 161.
2. А.Я Матов, П. Я. Сависько, Б.М. Герасимов. Основы
обработки и передачи информации в АСУ РТВ ПВО. –
Киев: КВИРТУ ПВО, 1985. – С.7–16.
3. Справочник офицера воздушно-космической обороны /
под. ред. С.К. Бурмистрова. – Тверь: ВА ВКО, 2008. –
С.523–527.
3
4.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТВопрос №1
Статистические характеристики
последовательности дискретноквантового сигнала
4
5.
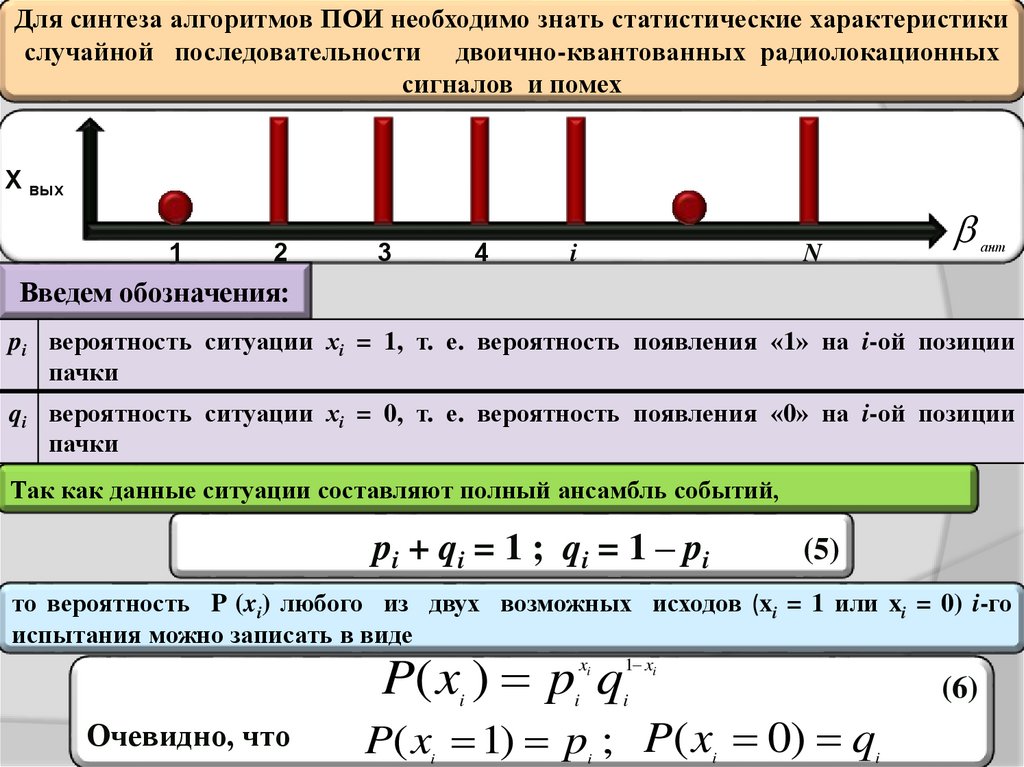
Для синтеза алгоритмов ПОИ необходимо знать статистические характеристикислучайной последовательности двоично-квантованных радиолокационных
сигналов и помех
X вых
1
2
3
4
i
N
ант
Введем обозначения:
pi вероятность ситуации хi = 1, т. е. вероятность появления «1» на i-ой позиции
пачки
qi вероятность ситуации хi = 0, т. е. вероятность появления «0» на i-ой позиции
пачки
Так как данные ситуации составляют полный ансамбль событий,
pi + qi = 1 ; qi = 1 – pi
(5)
то вероятность P (xi) любого из двух возможных исходов (xi = 1 или xi = 0) i-го
испытания можно записать в виде
P( x ) p q
i
Очевидно, что
xi
1 xi
i
i
(6)
P( x 1) p ; P( x 0) q
i
i
i
i
6.
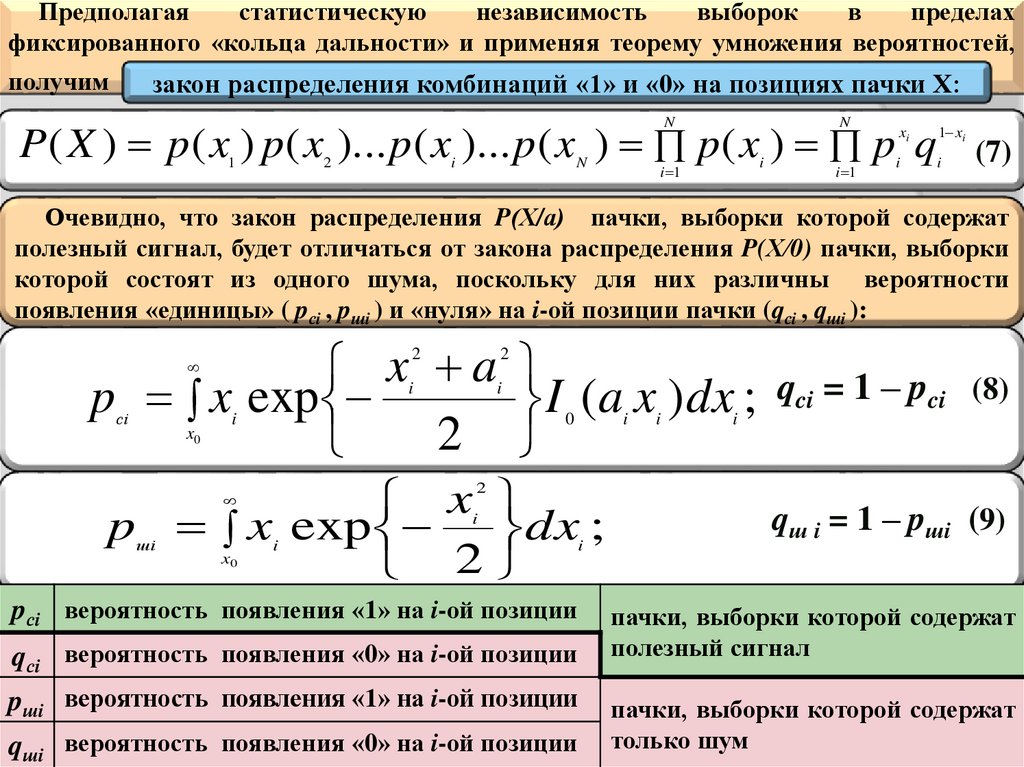
Предполагаястатистическую
независимость
выборок
в
пределах
фиксированного «кольца дальности» и применяя теорему умножения вероятностей,
получим
закон распределения комбинаций «1» и «0» на позициях пачки Х:
P( X ) p ( x ) p ( x )... p ( x )... p ( x ) p ( x ) p q
N
1
2
i
N
N
i
i 1
i 1
xi
1 xi
i
i
(7)
Очевидно, что закон распределения P(Х/а) пачки, выборки которой содержат
полезный сигнал, будет отличаться от закона распределения P(Х/0) пачки, выборки
которой состоят из одного шума, поскольку для них различны вероятности
появления «единицы» ( pсi , pшi ) и «нуля» на i-ой позиции пачки (qсi , qшi ):
x a
p x exp
I (a x )dx ; qci = 1 – pci (8)
2
сi
x0
2
2
i
i
i
0
i
x
p x exp dx ;
2
i
x0
i
2
шi
i
i
pсi вероятность появления «1» на i-ой позиции
qсi вероятность появления «0» на i-ой позиции
pшi вероятность появления «1» на i-ой позиции
qшi вероятность появления «0» на i-ой позиции
i
qш i = 1 – pшi (9)
пачки, выборки которой содержат
полезный сигнал
пачки, выборки которой содержат
только шум
7.
P( X ) p ( x ) p ( x )... p ( x )... p ( x ) p ( x ) p qN
1
2
i
N
N
i
i 1
x a
p x exp
I ( a x ) dx ;
2
сi
x0
2
2
i
i
i
0
i
i
i
i 1
xi
1 xi
i
i
(7)
qci = 1 – pci (8)
xi2
pшi xi exp dxi ;
2
x0
qш i = 1 – pшi (9)
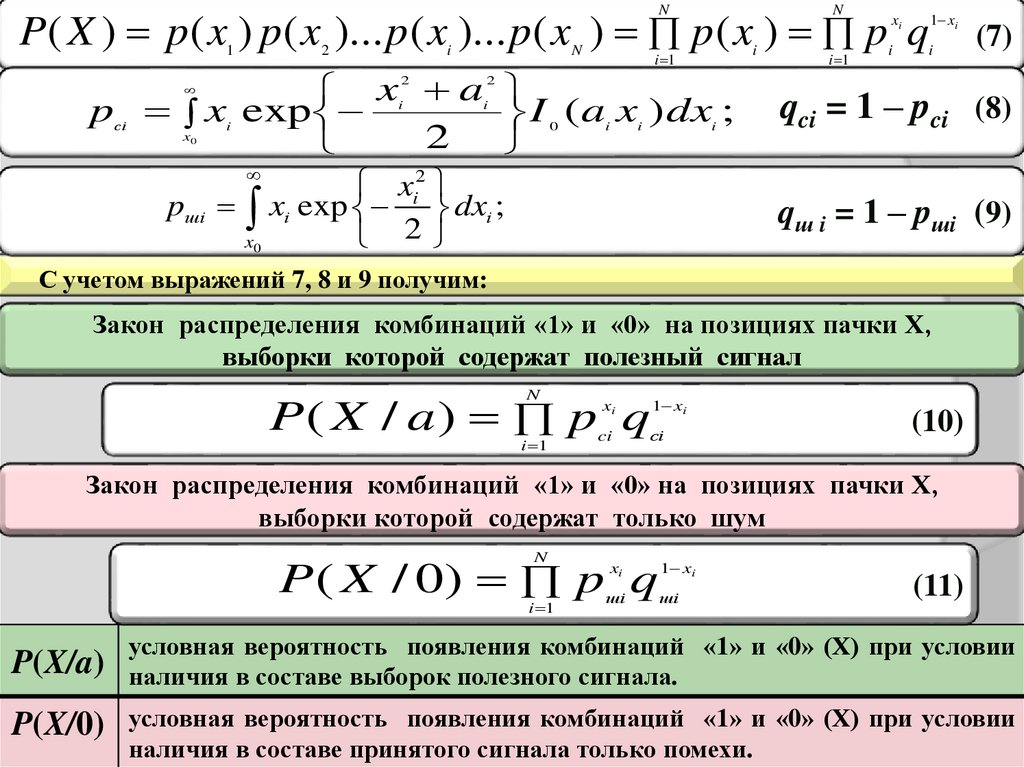
С учетом выражений 7, 8 и 9 получим:
Закон распределения комбинаций «1» и «0» на позициях пачки Х,
выборки которой содержат полезный сигнал
P( X / a) p q
N
i 1
xi
1 xi
ci
сi
(10)
Закон распределения комбинаций «1» и «0» на позициях пачки Х,
выборки которой содержат только шум
P ( X / 0) p q
N
i 1
xi
1 xi
шi
шi
(11)
P(X/a)
условная вероятность появления комбинаций «1» и «0» (Х) при условии
наличия в составе выборок полезного сигнала.
P(X/0)
условная вероятность появления комбинаций «1» и «0» (Х) при условии
наличия в составе принятого сигнала только помехи.
8.
P( X / a) p qN
i 1
xi
1 xi
ci
сi
P ( X / 0) p q
N
(10)
i 1
xi
1 xi
шi
шi
(11)
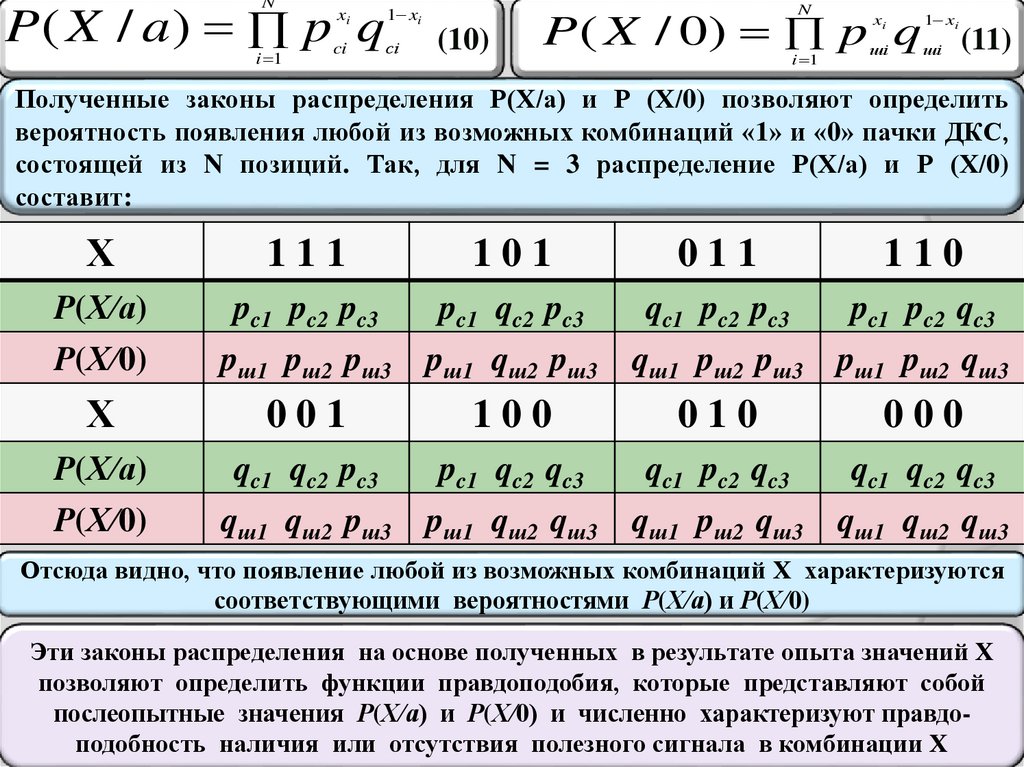
Полученные законы распределения Р(Х/а) и Р (Х/0) позволяют определить
вероятность появления любой из возможных комбинаций «1» и «0» пачки ДКС,
состоящей из N позиций. Так, для N = 3 распределение Р(Х/а) и Р (Х/0)
составит:
Х
P(Х/а)
P(Х/0)
Х
P(Х/а)
P(Х/0)
111
101
011
110
pc1 pc2 pc3
pc1 qc2 pc3
qc1 pc2 pc3
pc1 pc2 qc3
pш1 pш2 pш3 pш1 qш2 pш3 qш1 pш2 pш3 pш1 pш2 qш3
001
100
010
000
qc1 qc2 pc3
pc1 qc2 qc3
qc1 pc2 qc3
qc1 qc2 qc3
qш1 qш2 pш3 pш1 qш2 qш3 qш1 pш2 qш3 qш1 qш2 qш3
Отсюда видно, что появление любой из возможных комбинаций Х характеризуются
соответствующими вероятностями Р(Х/а) и Р(Х/0)
Эти законы распределения на основе полученных в результате опыта значений Х
позволяют определить функции правдоподобия, которые представляют собой
послеопытные значения Р(Х/а) и Р(Х/0) и численно характеризуют правдоподобность наличия или отсутствия полезного сигнала в комбинации Х
9.
Сибирский федеральный университетВывод по 2-му
вопросу
Полученные законы распределения пачек ДКС Р(Х/а) и Р(Х/0) могут быть
использованы для синтеза и анализа алгоритмов ПОИ , поскольку известны
значения pci, qci, pшi, qшi, количество позиций в пачке N и число возможных
комбинаций «1» и «0» М = 2N
X вых
1
2
3
4
i
ант
N
9
10.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТВопрос №2
Алгоритмы обнаружения цели по
пачке ДКС
10
11.
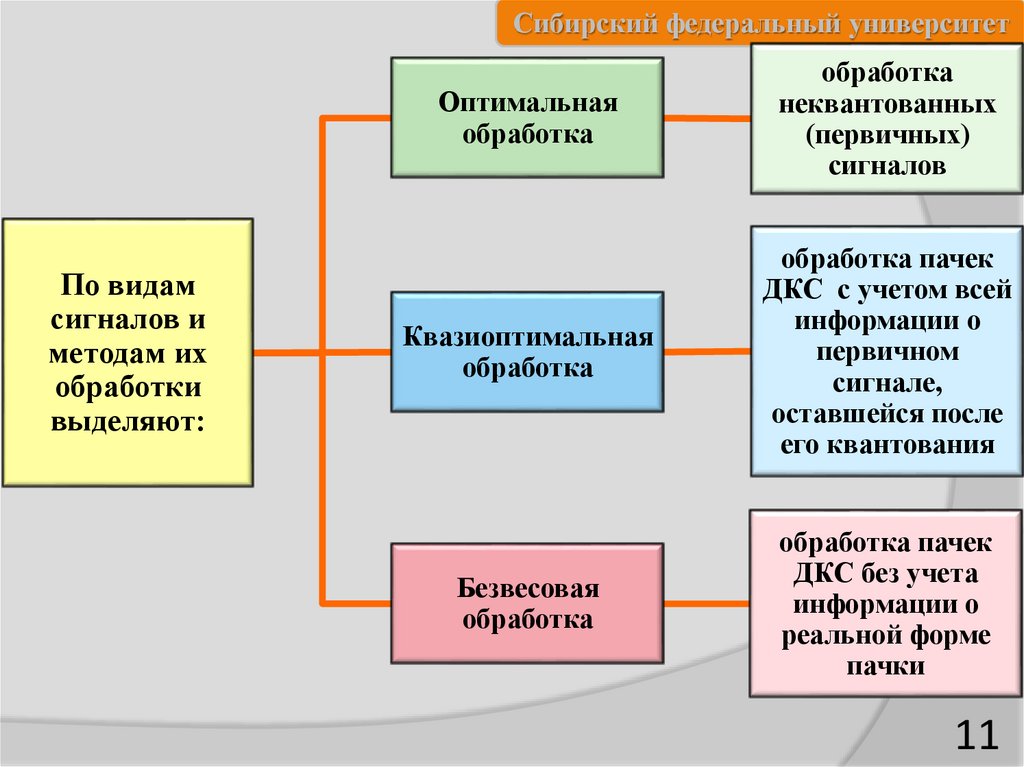
Сибирский федеральный университетПо видам
сигналов и
методам их
обработки
выделяют:
Оптимальная
обработка
обработка
неквантованных
(первичных)
сигналов
Квазиоптимальная
обработка
обработка пачек
ДКС с учетом всей
информации о
первичном
сигнале,
оставшейся после
его квантования
Безвесовая
обработка
обработка пачек
ДКС без учета
информации о
реальной форме
пачки
11
12.
Сибирскийфедеральный
Синтез квазиоптимального алгоритма
обнаружения
целиуниверситет
по пачке
ДКС производится на основе:
1
Методов теории статистических решений
2
следующих исходных предпосылок:
полезный (отраженный от цели) сигнал имеет пачечную структуру
Х={x1, х2, …хN} и состоит из N импульсов;
x вых
1
2
3
4
i
ант
N
все импульсы пачки находятся в одном кольце дальности;
обработка последовательности ДКС производится раздельно на каждом
кольце дальности ΔDk.
13.
Сибирский федеральный университетПостановка задачи:
1
Пусть с выхода квантизатора на вход обнаружителя поступает пачка
ДКС Х={xi}, значения i меняются от 1 до N, где xi = {1, 0};
x вых
1
2
3
4
i
ант
N
2
вероятности появления выборок xi на позициях пачки рci (qci)
известны;
3
последовательность
выборок искажена воздействием помех и
ошибками квантования.
Необходимо синтезировать алгоритм, позволяющий обнаружителю по пачке
ДКС принять оптимальное решение (наиболее близкое к истинному) о её
принадлежности к сигналу, отраженному от цели (γ1) либо помехе (γ2).
14.
Сибирскийпринятияфедеральный
университет
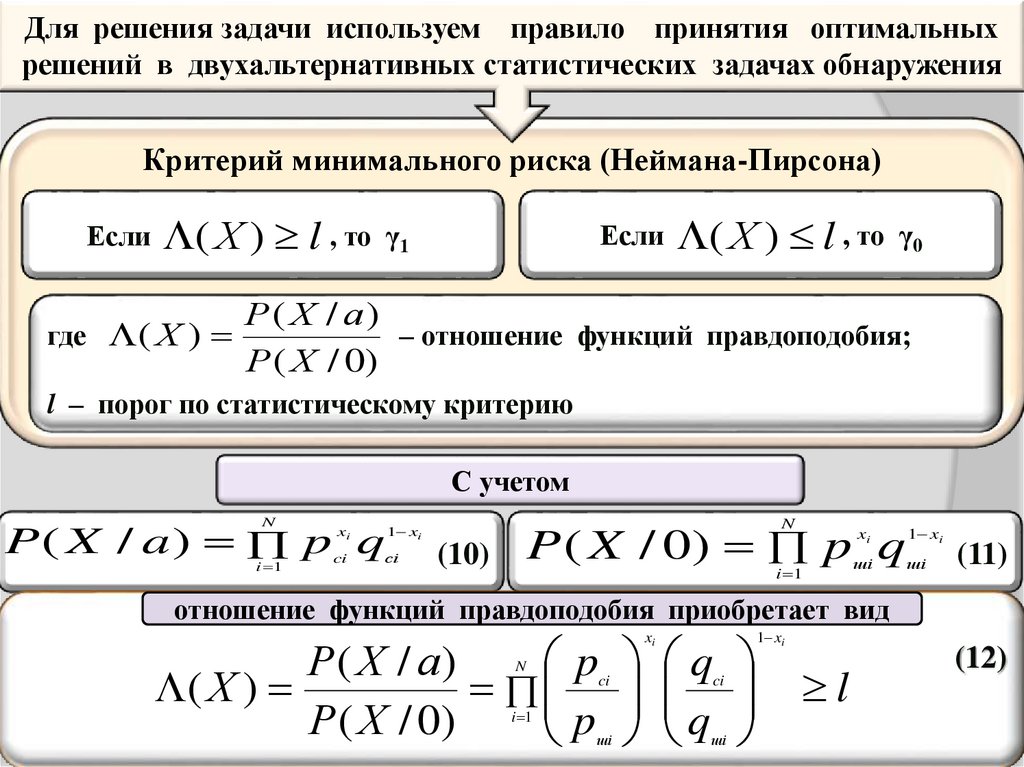
Для решения задачи используем правило
оптимальных
решений в двухальтернативных статистических задачах обнаружения
Критерий минимального риска (Неймана-Пирсона)
Если ( Х ) l , то γ1
где ( Х )
Если ( Х ) l , то γ0
Р( Х / а)
– отношение функций правдоподобия;
Р ( Х / 0)
l – порог по статистическому критерию
С учетом
P( X / a) p q
N
i 1
xi
1 xi
ci
сi
P ( X / 0) p q
N
(10)
i 1
xi
1 xi
шi
шi
(11)
отношение функций правдоподобия приобретает вид
p q
Р( Х / а)
( Х )
Р( Х / 0)
p q
xi
N
ci
ci
шi
шi
i 1
1 xi
l
(12)
15.
федеральныйуниверситет
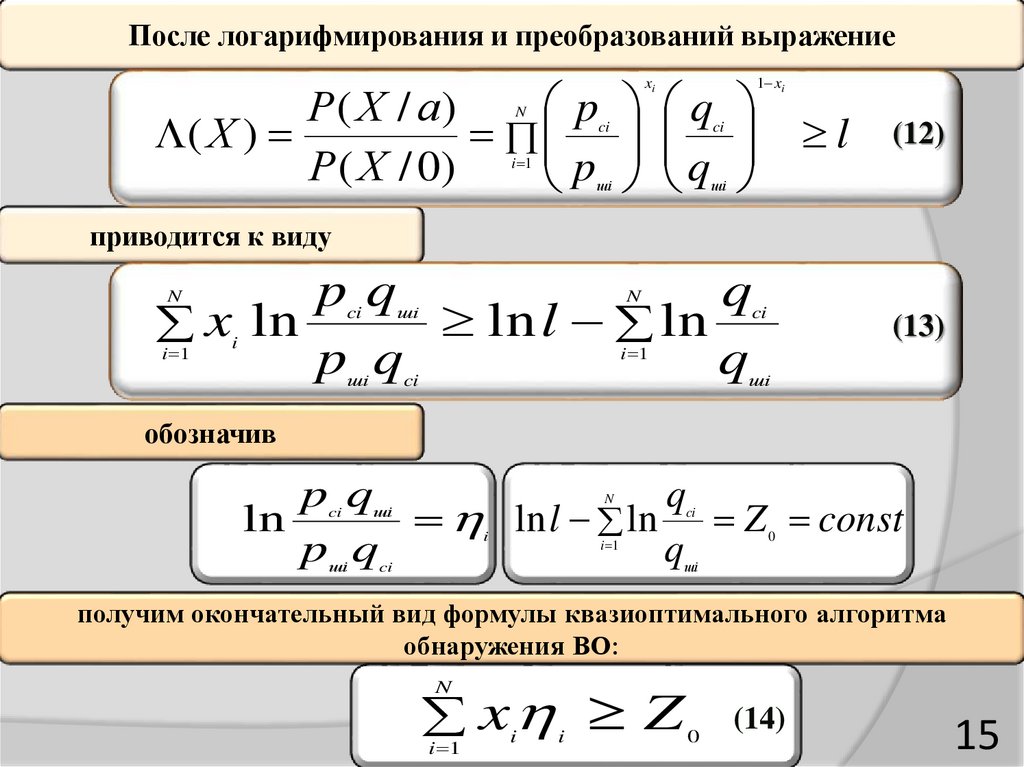
После логарифмирования и Сибирский
преобразований
выражение
p q
Р( Х / а)
( Х )
Р( Х / 0)
p q
xi
1 xi
l
N
ci
ci
шi
шi
i 1
(12)
приводится к виду
pq
q
ln l ln
x ln
p q
q
N
i 1
N
шi
ci
i
ci
(13)
i 1
шi
шi
ci
обозначив
p q
q
ln
ln l ln Z const
q
p q
ci
N
шi
ci
i
шi
0
i 1
шi
ci
получим окончательный вид формулы квазиоптимального алгоритма
обнаружения ВО:
x Z
N
i 1
i
i
0
(14)
15
16.
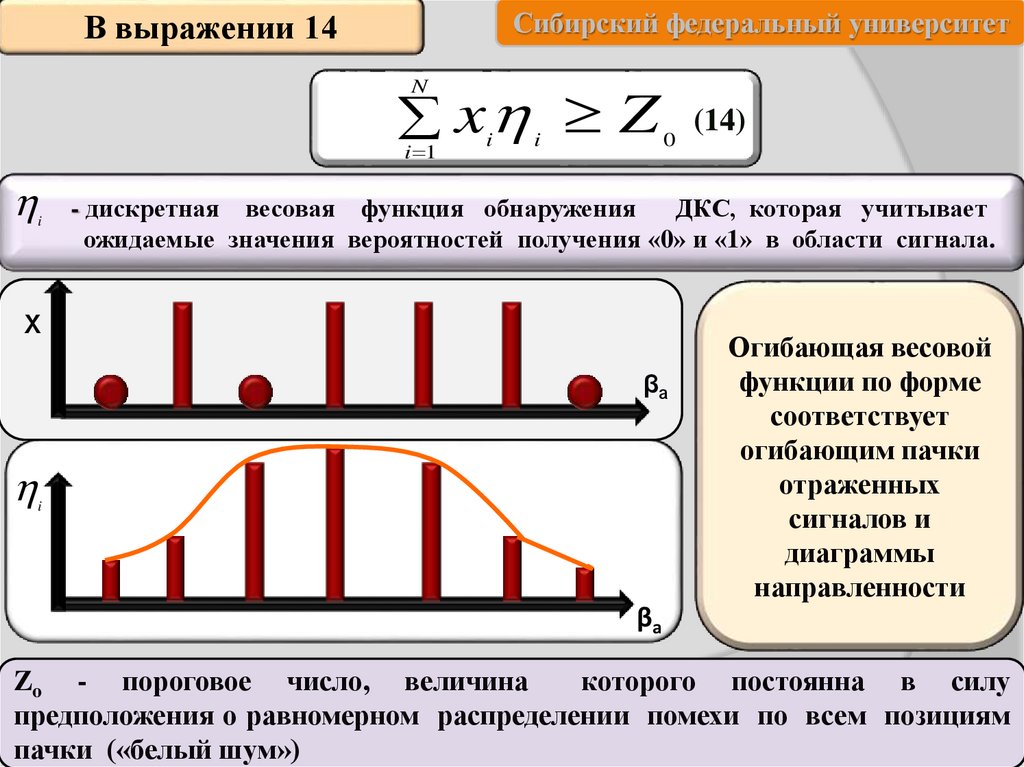
Сибирский федеральный университетВ выражении 14
x Z (14)
N
i 1
i
i
i
0
- дискретная весовая функция обнаружения
ДКС, которая учитывает
ожидаемые значения вероятностей получения «0» и «1» в области сигнала.
Х
βa
i
Огибающая весовой
функции по форме
соответствует
огибающим пачки
отраженных
сигналов и
диаграммы
направленности
βа
Zo - пороговое число, величина
которого постоянна в силу
предположения о равномерном распределении помехи по всем позициям
пачки («белый шум»)
17.
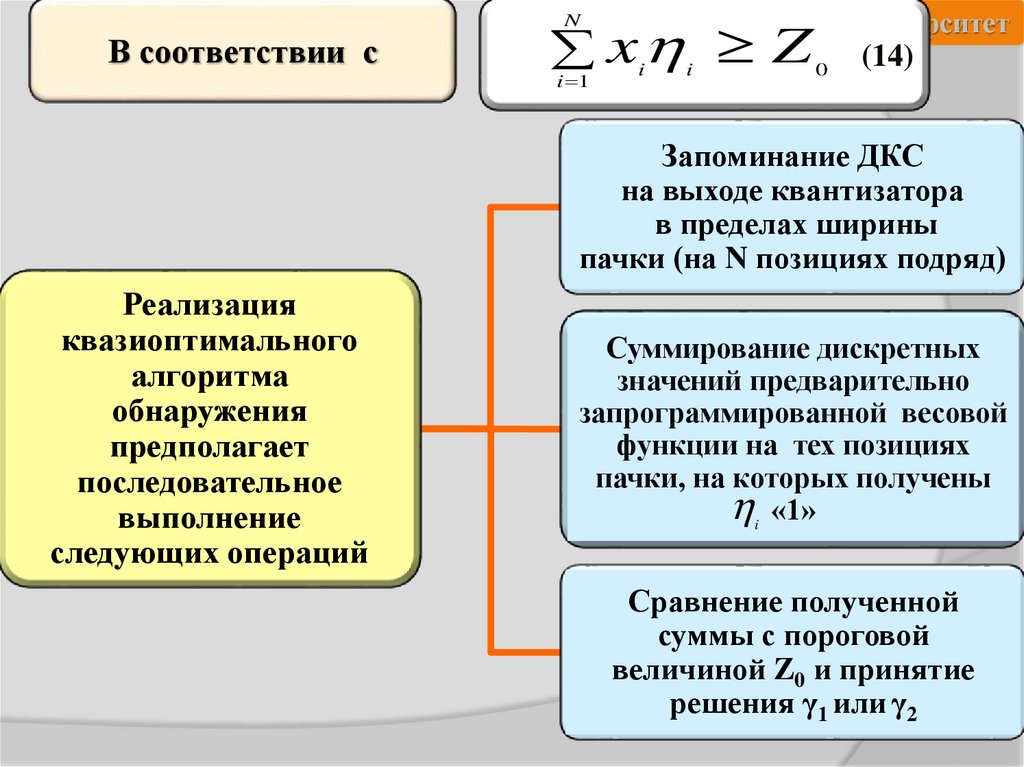
В соответствии сx Z
N
Сибирский
федеральный университет
i 1
i
i
0
(14)
Запоминание ДКС
на выходе квантизатора
в пределах ширины
пачки (на N позициях подряд)
Реализация
квазиоптимального
алгоритма
обнаружения
предполагает
последовательное
выполнение
следующих операций
Суммирование дискретных
значений предварительно
запрограммированной весовой
функции на тех позициях
пачки, на которых получены
i «1»
Сравнение полученной
суммы с пороговой
величиной Z0 и принятие
решения γ1 или γ2
18.
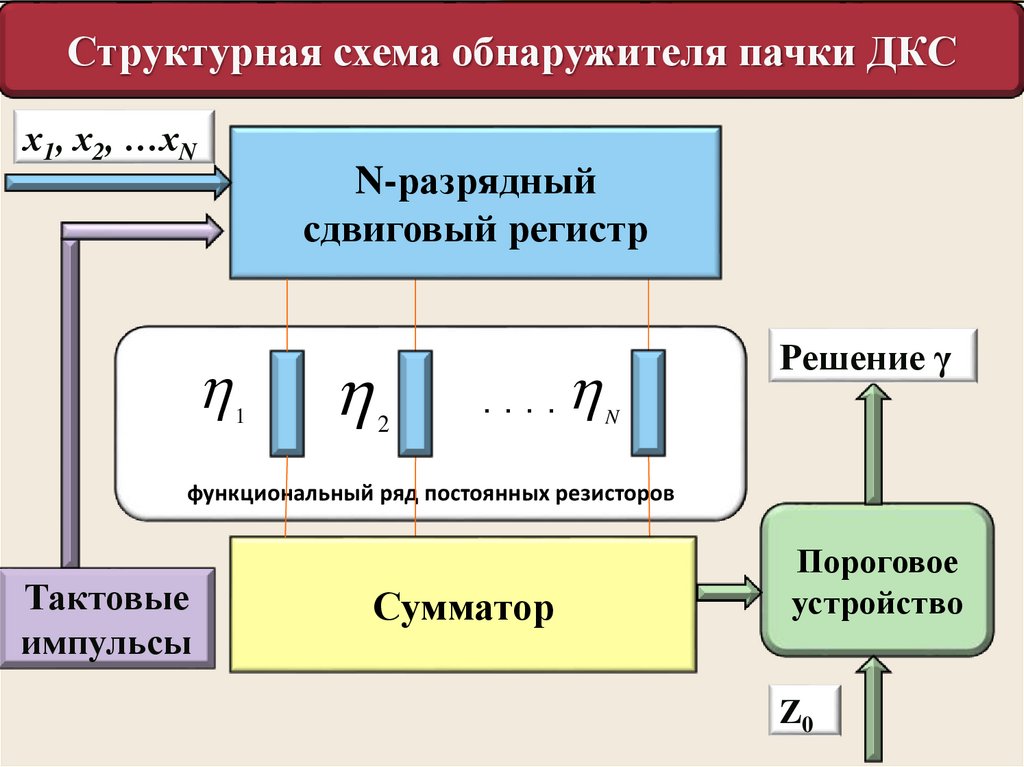
Сибирский федеральный университетСтруктурная схема обнаружителя пачки ДКС
х1, х2, …хN
N-разрядный
сдвиговый регистр
1
2
. . . .
Решение γ
N
функциональный ряд постоянных резисторов
Тактовые
импульсы
Сумматор
Пороговое
устройство
Z0
19.
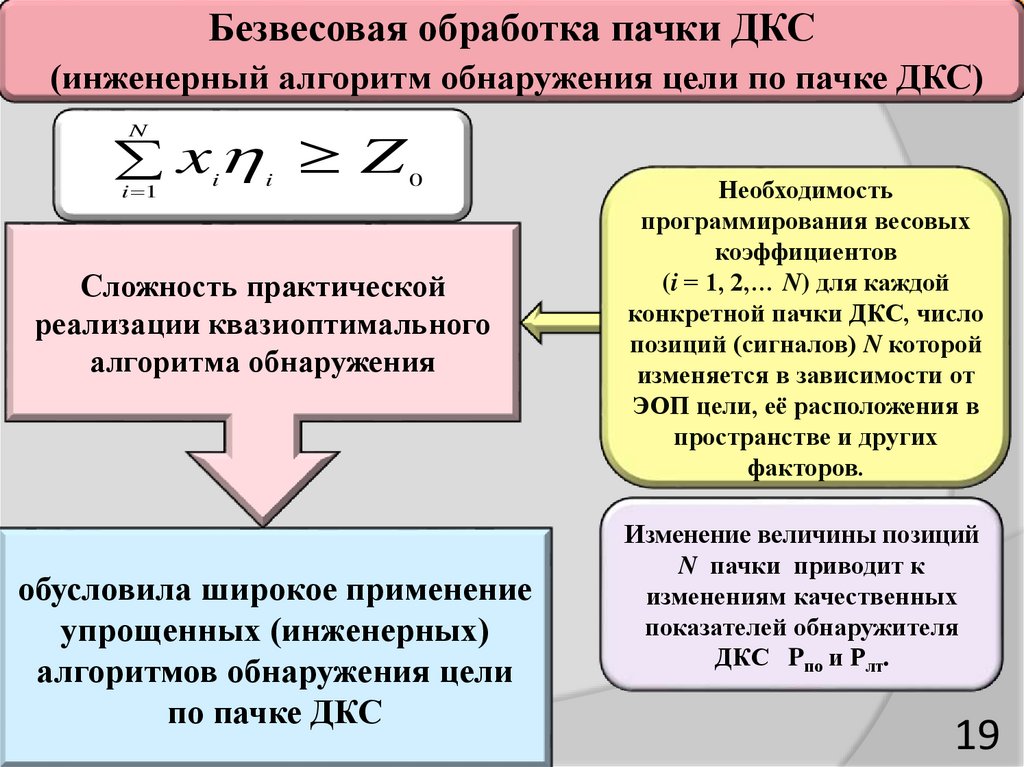
Сибирскийфедеральный
Безвесовая обработка
пачки
ДКС университет
(инженерный алгоритм обнаружения цели по пачке ДКС)
x Z
N
i 1
i
i
0
Сложность практической
реализации квазиоптимального
алгоритма обнаружения
обусловила широкое применение
упрощенных (инженерных)
алгоритмов обнаружения цели
по пачке ДКС
Необходимость
программирования весовых
коэффициентов i
(i = 1, 2,… N) для каждой
конкретной пачки ДКС, число
позиций (сигналов) N которой
изменяется в зависимости от
ЭОП цели, её расположения в
пространстве и других
факторов.
Изменение величины позиций
N пачки приводит к
изменениям качественных
показателей обнаружителя
ДКС Pпо и Рлт.
19
20.
Синтез упрощенного (инженерного)алгоритма
обнаружения
цели
Сибирский
федеральный
университет
по пачке ДКС производится на основе:
исходных предпосылок квазиоптимального алгоритма:
полезный (отраженный от цели) сигнал имеет пачечную структуру
Х={x1, х2, … хN} и состоит из N импульсов;
x вых
1
2
3
4
i
ант
N
все импульсы пачки находятся в одном кольце дальности;
обработка последовательности ДКС производится раздельно на каждом
кольце дальности.
и дополнительной предпосылки:
пачка имеет прямоугольную форму, т. е. pc1 = pc2 = … pci = pcN = const;
pш1 = pш2 = … pшi = pшN = const; i = const
21.
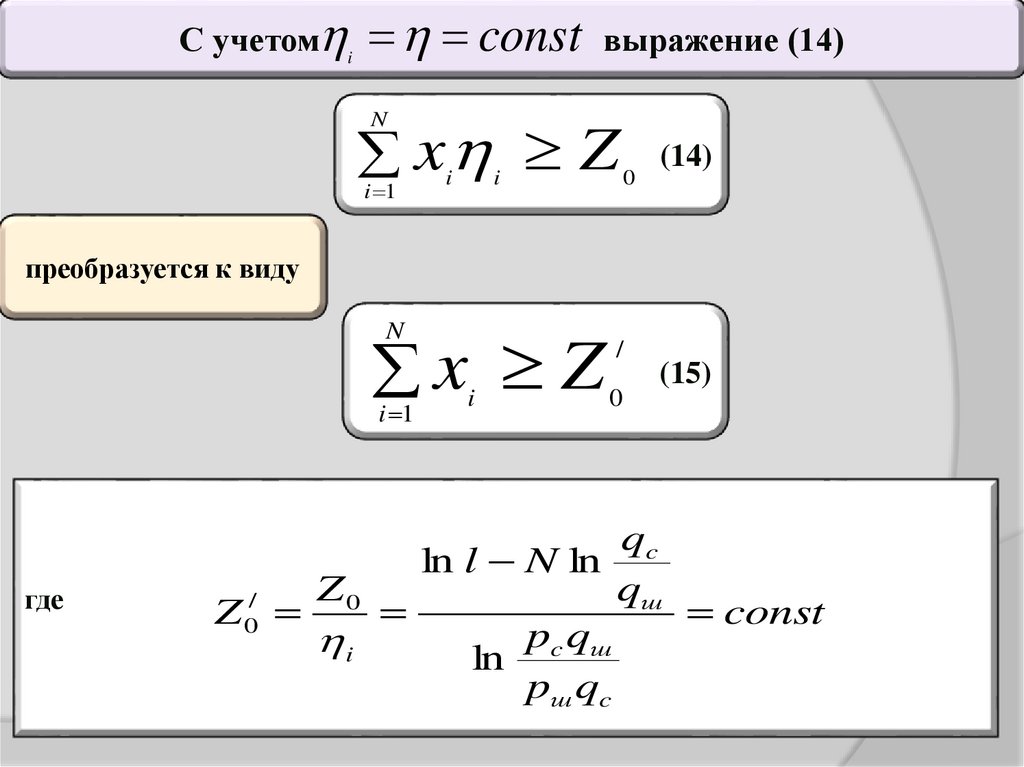
С учетом i const выражение (14)Сибирский федеральный университет
x Z
N
i
0
x Z
/
i 1
i
(14)
преобразуется к виду
N
i 1
где
i
0
(15)
qc
ln l N ln
Z0
qш
/
Z0
const
pc qш
i
ln
pш qc
22.
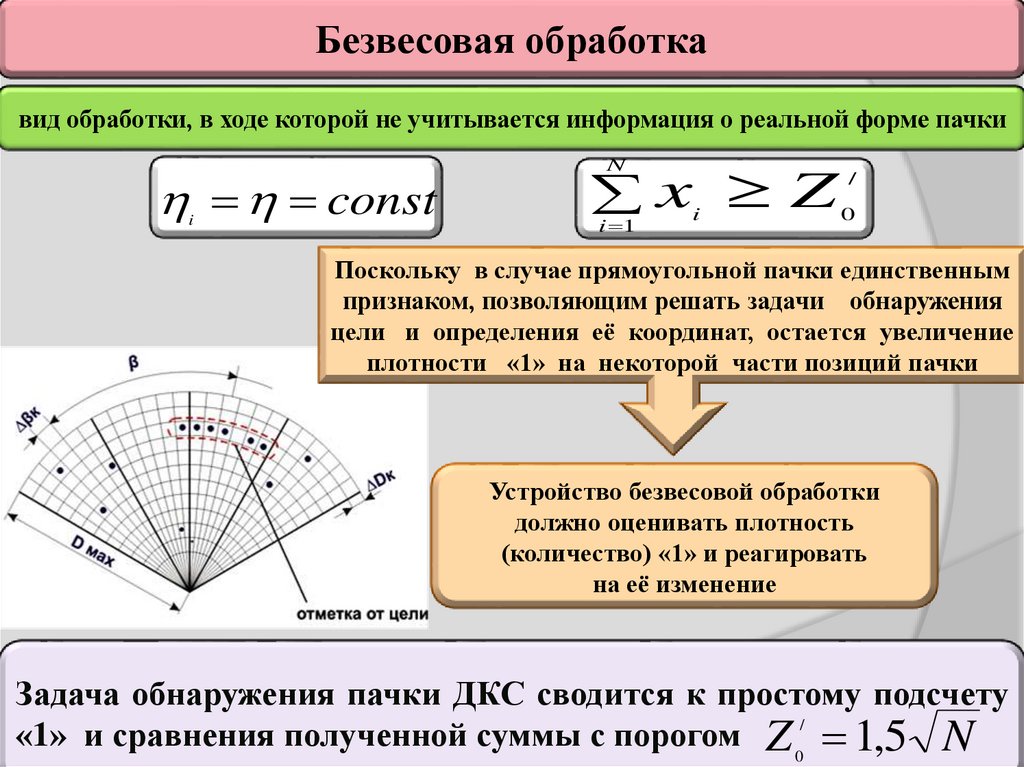
Сибирский федеральный университетБезвесовая обработка
вид обработки, в ходе которой не учитывается информация о реальной форме пачки
const
i
x Z
N
i 1
i
/
0
Поскольку в случае прямоугольной пачки единственным
признаком, позволяющим решать задачи обнаружения
цели и определения её координат, остается увеличение
плотности «1» на некоторой части позиций пачки
Устройство безвесовой обработки
должно оценивать плотность
(количество) «1» и реагировать
на её изменение
Задача обнаружения пачки ДКС сводится к простому подсчету
«1» и сравнения полученной суммы с порогом Z 0/ 1,5 N
23.
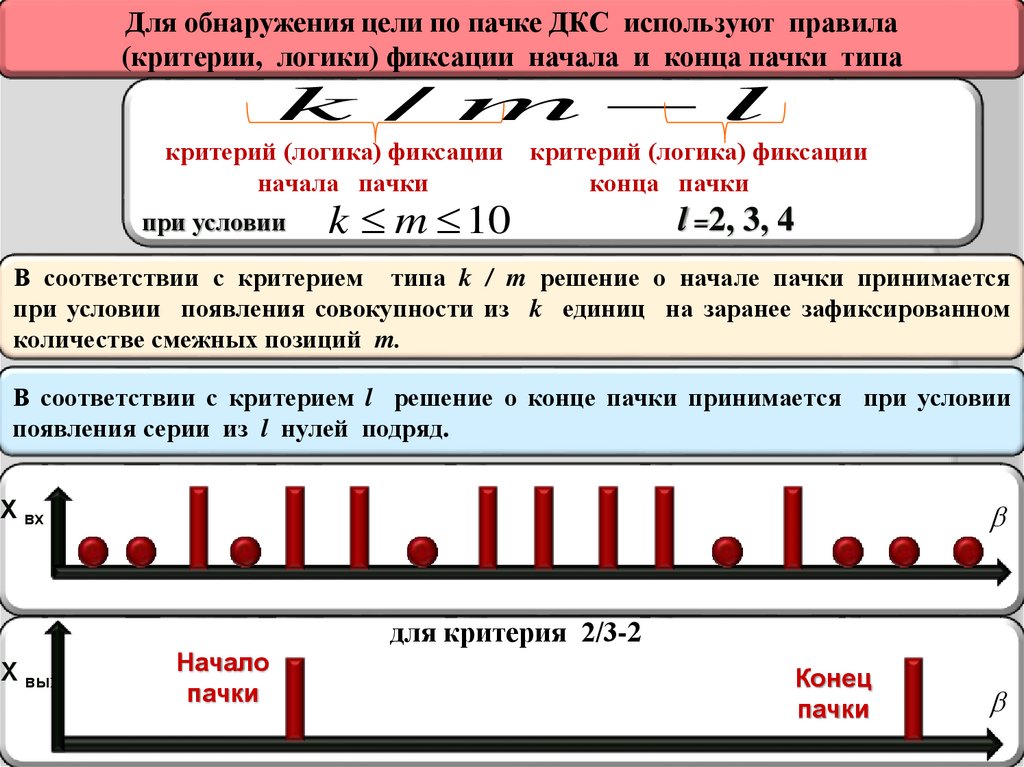
Для обнаружения цели по пачкеДКС используют
правила
Сибирский
федеральный
университет
(критерии, логики) фиксации начала и конца пачки типа
k / m l
критерий (логика) фиксации
начала пачки
при условии
k m 10
критерий (логика) фиксации
конца пачки
l =2, 3, 4
В соответствии с критерием типа k / m решение о начале пачки принимается
при условии появления совокупности из k единиц на заранее зафиксированном
количестве смежных позиций m.
В соответствии с критерием l решение о конце пачки принимается при условии
появления серии из l нулей подряд.
X вх
для критерия 2/3-2
X вых
Начало
пачки
Конец
пачки
24.
Частным случаем логик типа k / m Сибирский– l являются
программы типа
k / k - l,
федеральный
университет
именуемые «методом серий». Его достоинствами являются простота
технической реализации, высокая вероятность правильного обнаружения.
В то же время более высокие по сравнению с логиками типа k / m – l
энергетические потери затрудняют применение метода серий для
обнаружения слабых сигналов.
X вх
критерий 2/3-2
X вых
Начало
пачки
Конец
пачки
критерий 3/3-3
X вых
Начало
пачки
В зависимости от конкретных значений k, m и l
фиксации начала и конца пачки будут различны.
Конец
пачки
результаты
25.
Сибирскийфедеральный
университет
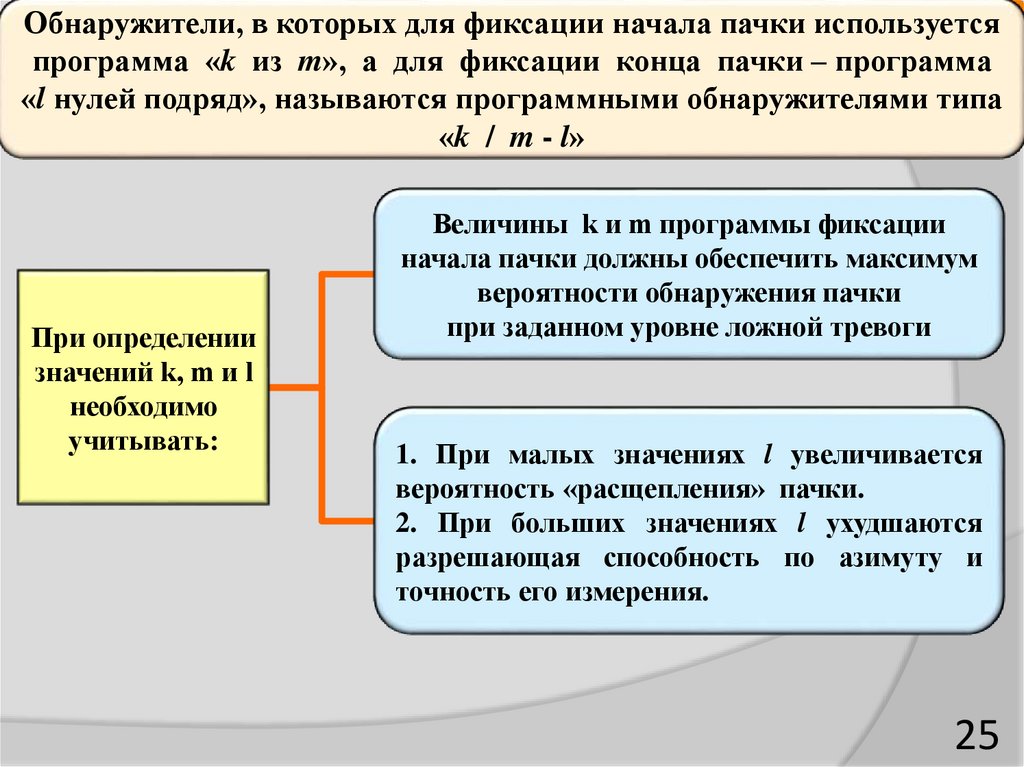
Обнаружители, в которых для фиксации
начала
пачки используется
программа «k из m», а для фиксации конца пачки – программа
«l нулей подряд», называются программными обнаружителями типа
«k / m - l»
При определении
значений k, m и l
необходимо
учитывать:
Величины k и m программы фиксации
начала пачки должны обеспечить максимум
вероятности обнаружения пачки
при заданном уровне ложной тревоги
1. При малых значениях l увеличивается
вероятность «расщепления» пачки.
2. При больших значениях l ухудшаются
разрешающая способность по азимуту и
точность его измерения.
25
26.
Сибирский федеральный университетВыводы по 2-му
вопросу
1. Применение квазиоптимальных алгоритмов
обнаружения ВО на
практике ограниченно в силу их существенной зависимости от
изменения ЭОП цели, её пространственного положения и других
факторов, определяющих изменение величины позиций N пачки и,
соответственно, изменения качественных показателей обнаружителя
ДКС Pпо и Рлт.
2. В КСА КП РТВ самое широкое применение нашли программные
обнаружители типа k/m – l благодаря возможности их реализации с
помощью обычного двоичного счетчика. Эффективность программных
обнаружителей, реализующих инженерные
алгоритмы ПОИ,
определяется выбранными значениями k, m и l.
X вых
1
2
3
4
i
ант
N
26
27.
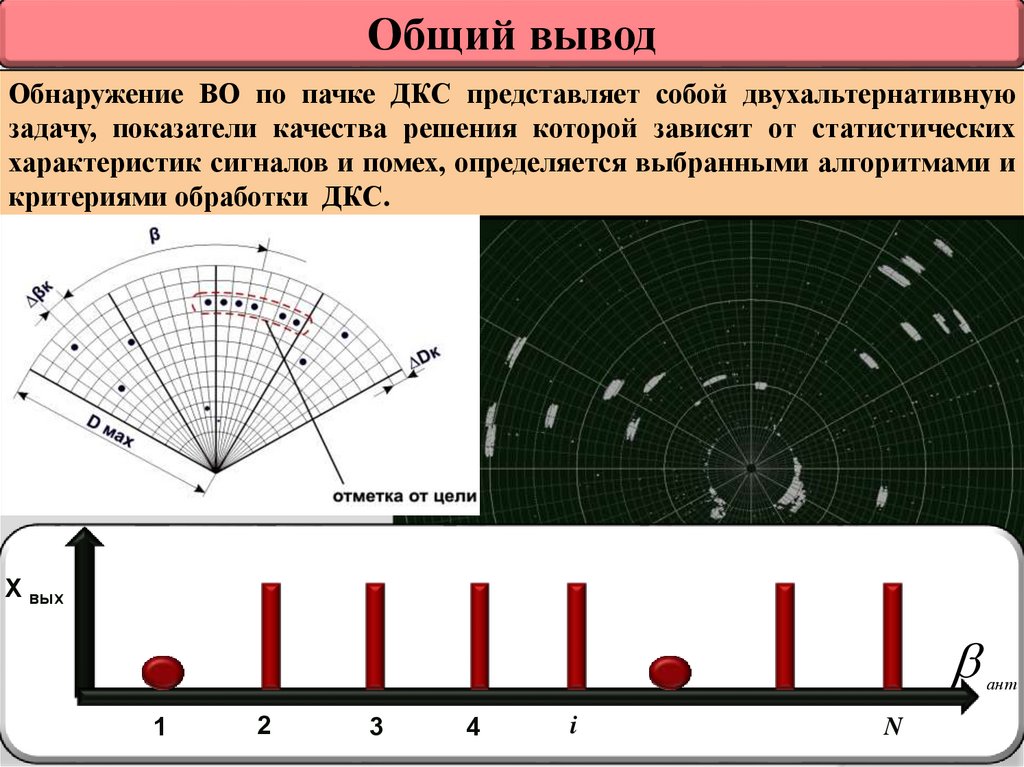
ОбщийСибирскийвывод федеральный университет
Обнаружение ВО по пачке ДКС представляет собой двухальтернативную
задачу, показатели качества решения которой зависят от статистических
характеристик сигналов и помех, определяется выбранными алгоритмами и
критериями обработки ДКС.
X вых
1
2
3
4
i
N
ант
28.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТАлгоритмы обнаружения цели по пачке ДКС
По видам сигналов и методам обработки сигналов выделяют оптимальную,
квазиоптимальную и безвесовую обработку. Под оптимальной понимают обработку
неквантованных (первичных) сигналов. Квазиоптимальная обработка заключается в
обработке пачек ДКС с учетом всей информации о первичном сигнале, оставшейся
после квантования. И наконец, безвесовая обработка пачек ДКС осуществляется без
учета информации о реальной форме сигналов. В дальнейшем мы будем
рассматривать только квазиоптимальную и безвесовую обработки, поскольку в
автоматических УПО КСА обнаружение целей и оценка их координат осуществляется
по пачкам ДКС.
28
29.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТКвазиоптимальный алгоритм обнаружения цели по пачке ДКС
Синтез квазиоптимального алгоритма обнаружения цели осуществляется на
основе
методов
теории
статистических
решений
и
следующих
исходных
предпосылок:
1.
Полезный (отраженный от цели) сигнал имеет пачечную структуру: Х = {х1, х2,
... , х m } и состоит из m импульсов.
2.
Период дискретизации tk напряжения на выходе детектора приемного
устройства выбран таким, что все импульсы принимаемой пачки находятся в одном
кольце дальности по дальности ΔDk.
3.
Обработка последовательности ДКС производится раздельно на каждом кольце
дальности ΔDk.
Постановка задачи:
–
пусть с выхода квантизатора на вход обнаружителя поступает пачка ДКС Х =
{xi}, значения i меняются от 1 до m, где xi = {1, 0};
–
вероятности появления выборок xi на позициях пачки рci (qci) известны;
–
последовательность выборок искажена воздействием помех и ошибками
квантования.
29
30.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТНеобходимо синтезировать алгоритм, позволяющий обнаружителю по пачке ДКС
принять оптимальное решение (наиболее близкое к истинному) о её принадлежности
к сигналу, отраженному от цели (γ1) либо помехи (γ0).
Для решения данной задачи воспользуемся общим правилом принятия
оптимальных решений в двухальтернативных статистических задачах обнаружения, т.
е. критерием минимального риска (критерий Неймана – Пирсона), описываемым
выражениями:
где
Если Λ(Х)>l, то принимается решение о наличии цели H*1, в противном случае
Λ(Х) ≤ l - H*1, т. е. цель не обнаружена, где
( Х )
Р( Х / а)
- отношение функций правдоподобия;
Р( Х / 0)
l – порог по статистическому критерию.
30
31.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТС учетом выражений функций правдоподобия
N
P( X / a) pcxii qс1i xi
(8)
i 1
И
N
P ( X / 0) pшxii qш1 i xi
(9)
i 1
отношение функций правдоподобия приобретает вид:
xi
1 xi
pci qci
Р( Х / а)
(10)
( Х )
l
Р( Х / 0) i 1 pшi qшi
После логарифмирования и преобразований выражение 10 приводится к виду:
N
N
N
pci qшi
qci
x
ln
ln
l
ln
,
i
p
q
q
i 1
i 1
шi ci
шi
(11)
обозначив
p q
ln ci шi ηi ,
pшi qci
N
q
ln l ln ci Z0 const,
qшi
i 1
31
32.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТПолучим окончательный
обнаружения ВО:
вид
формулы
алгоритма
квазиоптимального
N
xη Z ,
i 1
i
i
0
(12)
где i
– дискретная весовая функция обнаружения ДКС, учитывающая
ожидаемые значения вероятностей получения нулей и единиц в области сигнала; Z0 –
пороговое число, величина которого предполагается что помеха равномерно
распределена по всем позициям пачки («белый шум»).
Обработка пачки ДКС с учетом весовой функции обнаружения ДКС i
называется весовой.
Из изложенного можно сделать вывод, что алгоритм квазиоптимального
обнаружения цели по пачке ДКС включает следующие операции:
1. Запоминание ДКС (нулей и единиц) на выходе квантизатора в пределах ширины
пачки, т. е. на n позициях подряд.
2. Суммирование значений предварительно запрограммированной весовой функции
на тех позициях пачки, на которых с выхода квантизатора получены единицы.
3. Сравнение полученной суммы с пороговой величиной Z0 и выработка решения γ1
или γ0.
32
33.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТСтруктурная схема обнаружителя, реализующего рассмотренный алгоритм
состоит из запоминающего устройства входных ДКС, представляющий N-разрядный
регистр. Весовая функция в виде весовых коэффициентов i задается при помощи
функционального ряда n постоянных резисторов.
Характерной особенностью
решающего устройства обнаружения цели по пачке ДКС является наличие двух
порогов:
- первый порог х0 устанавливается в квантизаторе для обнаружения отдельных
сигналов пачки;
- второй порог Z0 устанавливается на выходе сумматора в схеме сравнения для
обнаружения пачки ДКС.
33
34.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТИнженерный алгоритм обнаружения цели по пачке ДКС
Практически реализовать вышеописанный алгоритм весьма сложно из-за
необходимости программирования весовых коэффициентов i (i = 1, 2,… m) для
каждой конкретной пачки ДКС, число позиций (сигналов) n которой изменяется в
зависимости от ЭОП цели, её расположения в пространстве и других факторов. В
свою очередь изменение величины позиций n пачки приводит к изменениям
качественных показателей обнаружителя ДКС Pпо и Рлт
Вышеуказанное обусловило широкое применение в автоматических УПО КСА
КП РТВ упрощенных (инженерных) алгоритмов обнаружения цели по пачке ДКС.
Упрощенный (инженерный) алгоритм обнаружения полезного сигнала по пачке
ДКС можно синтезировать на основе квазиоптимального алгоритма, предполагая, что
пачка имеет прямоугольную форму, т. е. вероятности появления единиц на M
позициях постоянны, т. е. рс1 = рс2 = …= рсi = рсM = const; pш1 = рш2 =...= ршi = ршM =
соnst.
34
35.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТВ таком случае весовая функция будет постоянной i = и выражение
N
N
x η трансформируется в x .
i 1
i
i
0
i 1
i
/
0
Как указывалось выше, обработка без учета информации о реальной форме
сигнала называется безвесовой. В этом случае единственным признаком, по
которому решаются задачи обработки, является увеличение плотности единиц на
некоторой части позиций пачки. Очевидно, что плотность единиц в области цели
будет больше, чем в области помехи. Следовательно, устройство безвесовой
обработки должно оценивать плотность единиц и реагировать на её изменение.
Процесс обнаружения полезного сигнала заключается в простом подсчете
единиц на заранее определенных позициях пачки и сравнении накопленного числа с
порогом, который рассчитывается по формуле
0/ 1,5 m . Технически такое
устройство реализуется обычным двоичным счетчиком.
При обнаружении полезного сигнала используются критерии (программы или
логики) фиксации начала и конца пачки k/m–l, где k ≤ m ≤ 10, l = 2, 3, 4.
35
36.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТРешение о начале пачки принимается при появлении совокупности k единиц на
заранее зафиксированном количестве позиций m. Решение о конце пачки принимается
в случае наличия серии l нулей на l позициях подряд. Цифровые автоматы,
реализующие вышеуказанную логику фиксации начала и конца пачки, называются
программными обнаружителями типа k/m–l.
Среди логик k/m–l следует выделить программы типа k/k–l, именуемые «методом
серий». Его достоинствами являются простота технической реализации, высокая
вероятность правильного обнаружения. В то же время максимальные по сравнению с
логиками типа k/m–l энергетические потери затрудняют применение метода серий для
обнаружения слабых сигналов.
Как видно из приведенного примера, в зависимости от конкретных значений k, m
и l результаты фиксации начала и конца пачки будут различны. Поэтому величины k и
m выбираются с целью обеспечения максимума вероятности правильного обнаружения
пачки при заданной вероятности ложной тревоги. При выборе величины l необходимо
учитывать, что при малых значениях l возрастает вероятность «расщепления» пачки на
несколько пачек, при его больших значениях резко ухудшается разрешающая
способность по азимуту и точность его измерения.
36
37.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТТаким образом, делаем два вывода:
Во-первых, применение квазиоптимальных алгоритмов обнаружения ВО на
практике ограничено в силу их существенной зависимости от изменения ЭОП цели, её
пространственного
положения
и других
факторов,
определяющих
изменение
величины позиций N пачки и, соответственно, изменения качественных показателей
обнаружителя ДКС Pпо и Рлт.
Во-вторых, в КСА РТВ самое широкое применение нашли программные
обнаружители типа k/m–l благодаря возможности их реализации с помощью обычного
двоичного счетчика. Эффективность программных обнаружителей, реализующих
инженерные алгоритмы ПОИ, определяется выбранными значениями k, m и l.
Исходя из изложенного материала делаем общий вывод: обнаружение ВО по
пачке ДКС представляет собой двухальтернативную задачу, показатели качества
решения которой зависят от статистических характеристик сигналов и помех,
определяется выбранными алгоритмами и критериями обработки ДКС.
37
38.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТВопрос №3
Принцип автоматической обработки
эхо-сигналов в УПО КСА РТВ без
дискретизации по времени.
Кодирование информации о
координатах ЛО
38
39.
Принцип преобразования аналогового сигнала в цифровую формубез дискретизации по времени
УПО КСА (РЛС)
РЛС (РЛК)
Блок амплитудного квантования
Блок кодирования
Схема кодирования
Приемное
устройство
РЛС
Схема
азимута βi , времени
формирования
задержки ti и
прямоугольных
длительности τi
Х
(t)
импульсов
прямоугольных
Пороговое
устройство
U (t)
Хо
импульсов
Порог
отсечки
ti
i
U (t)
Х0
t
ti
Х (t)
i
t
40.
В результате на входЦВМ ПОИ
поступает случайная
последовательность
кодов азимута βi, времени задержки
ti и длительности i нормированных
по амплитуде сигналов, превысивших
порог отсечки Х0
Универсальная схема ЦВМ ПОИ (УПО) КСА (РЛС) РТВ
Блок
кодирования
Блок
амплитудного
квантования
Хо
Порог
отсечки
Блок
амплитудного
квантования
Арифметическое
Устройство
управления
Оперативное
ЗУ
устройство
ti, βi, i
Э-А
U (t)
Буферное
ЗУ
tj, βj, j
обеспечивает формирование нормированных по амплитуде
импульсов Э-А, длительность которых равна времени участков
входного напряжения, превысивших порог отсечки Х0
41.
Универсальная схема ЦВМ ПОИ (УПО) КСА (РЛС) РТВБлок
кодирования
Э-А
U (t)
Буферное
ЗУ
Арифметическое
устройство
ti, βi, i
tj, βj, j
Блок
амплитудного
квантования
Устройство
управления
Оперативное
ЗУ
Блок
кодирования
предназначен
для
кодирования азимута βi,
длительности i каждого нормированного импульса и
времени его задержки ti относительно зондирующего
сигнала.
Буферное ЗУ
предназначено для хранения кодов βi, i и ti импульсов,
полученных на текущем зондировании.
Запись и
считывание кодов осуществляются по мере возрастания
времени задержки квантованных сигналов ti.
42.
Универсальная схема ЦВМ ПОИ (УПО) КСА (РЛС) РТВБлок
кодирования
Буферное
ЗУ
Арифметическое
устройство
ti, βi, i
Э-А
U (t)
βj, tj, j
Блок
амплитудного
квантования
Устройство
управления
Оперативное
ЗУ
Арифметическое
устройство
предназначено
для
формирования пачек на основе
совпадения кодов импульсов текущего зондирования с
кодами импульсов предыдущего зондирования. Совпадение
импульсов фиксируется при наличии общей зоны
их
перекрытия.
Оперативное
ЗУ
предназначено для хранения кодов βj, j и tj импульсов,
полученных на предыдущем зондировании, а также
результатов обработки пачек с момента обнаружения
их начала до момента сброса.
43.
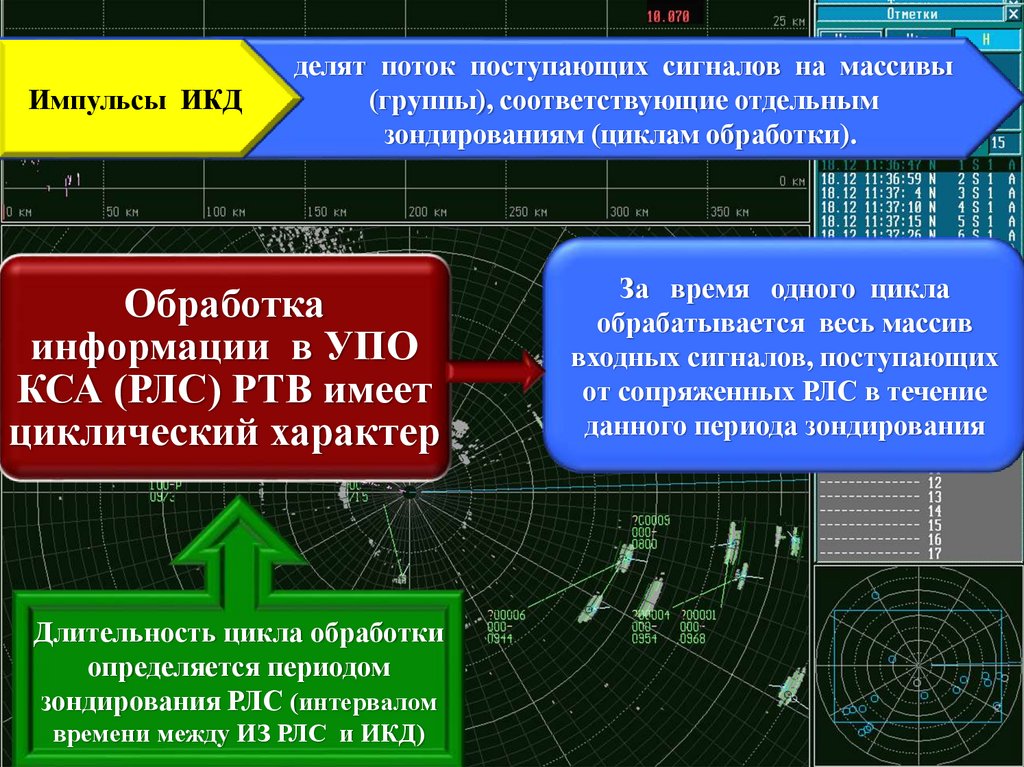
Импульсы ИКДделят поток поступающих сигналов на массивы
(группы), соответствующие отдельным
зондированиям (циклам обработки).
Обработка
информации в УПО
КСА (РЛС) РТВ имеет
циклический характер
Длительность цикла обработки
определяется периодом
зондирования РЛС (интервалом
времени между ИЗ РЛС и ИКД)
За время одного цикла
обрабатывается весь массив
входных сигналов, поступающих
от сопряженных РЛС в течение
данного периода зондирования
44.
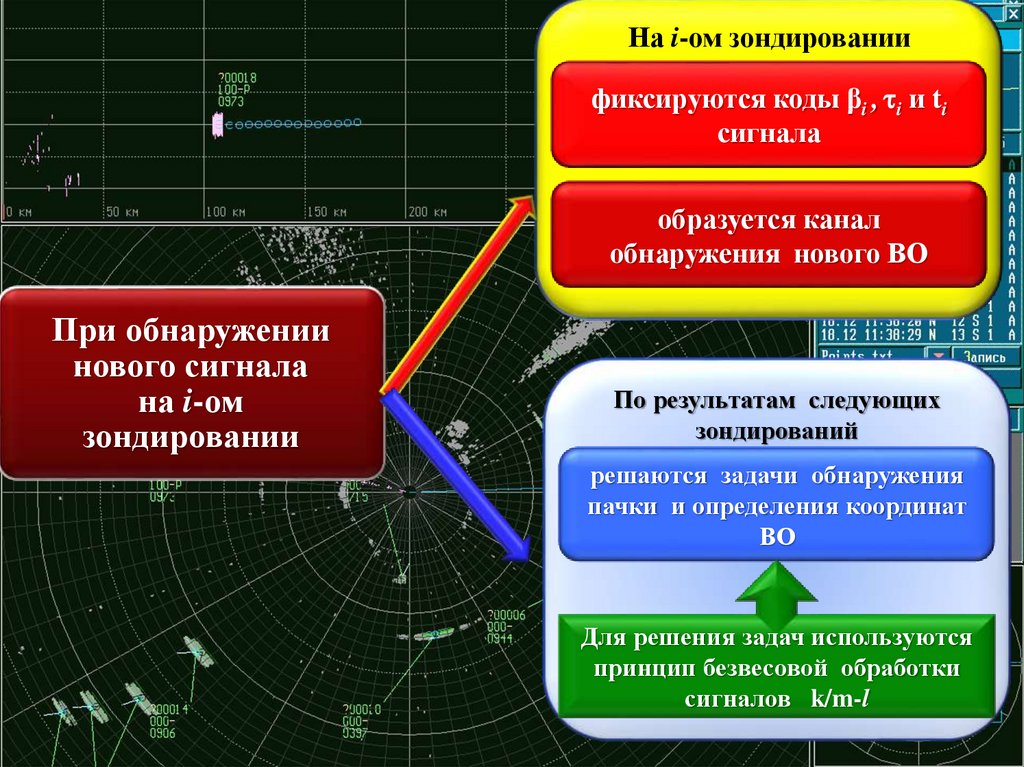
На i-ом зондированиификсируются коды βi , i и ti
сигнала
образуется канал
обнаружения нового ВО
При обнаружении
нового сигнала
на i-ом
зондировании
По результатам следующих
зондирований
решаются задачи обнаружения
пачки и определения координат
ВО
Для решения задач используются
принцип безвесовой обработки
сигналов k/m-l
45.
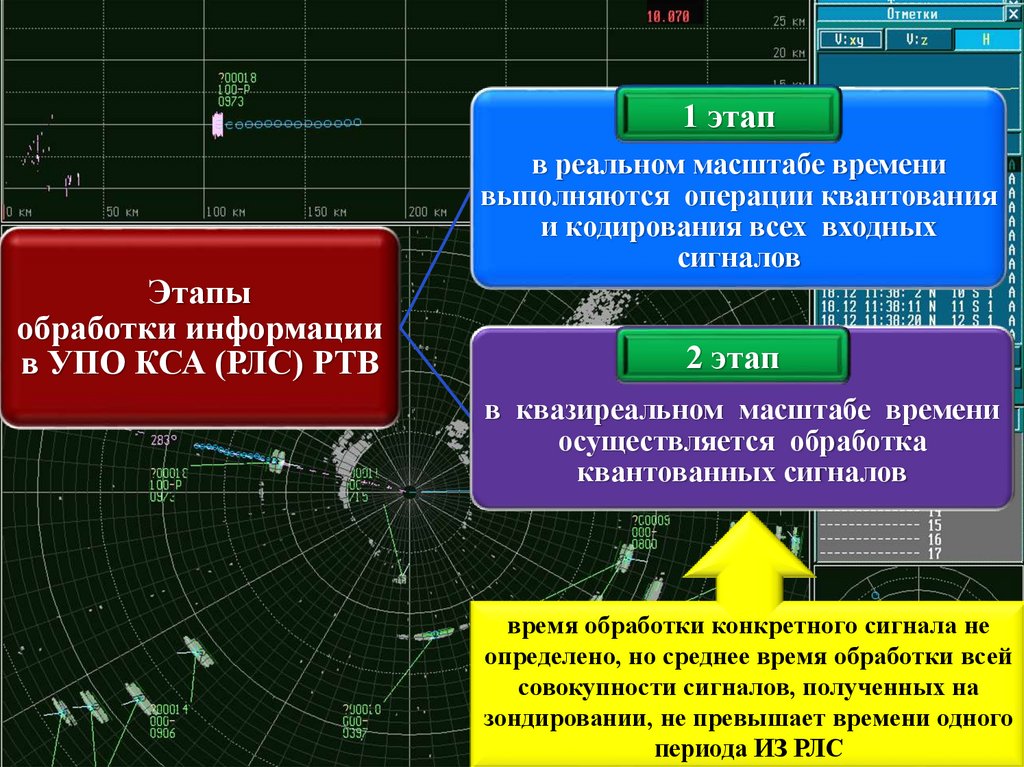
1 этапЭтапы
обработки информации
в УПО КСА (РЛС) РТВ
в реальном масштабе времени
выполняются операции квантования
и кодирования всех входных
сигналов
2 этап
в квазиреальном масштабе времени
осуществляется обработка
квантованных сигналов
время обработки конкретного сигнала не
определено, но среднее время обработки всей
совокупности сигналов, полученных на
зондировании, не превышает времени одного
периода ИЗ РЛС
46.
Универсальная схема ЦВМ ПОИ (УПО) КСА (РЛС) РТВБлок
кодирования
Э-А
U (t)
Буферное
ЗУ
ti, βi, i
Блок
Устройство
амплитудного
управления
квантования
Х0, сигналы
разрешения
УЗ-А (УЗ-19, УЗ-55)
с ЭВМ ВОИ КСА
Арифметическое
устройство
КТ-А
βj, tj, j
Оперативное
ЗУ
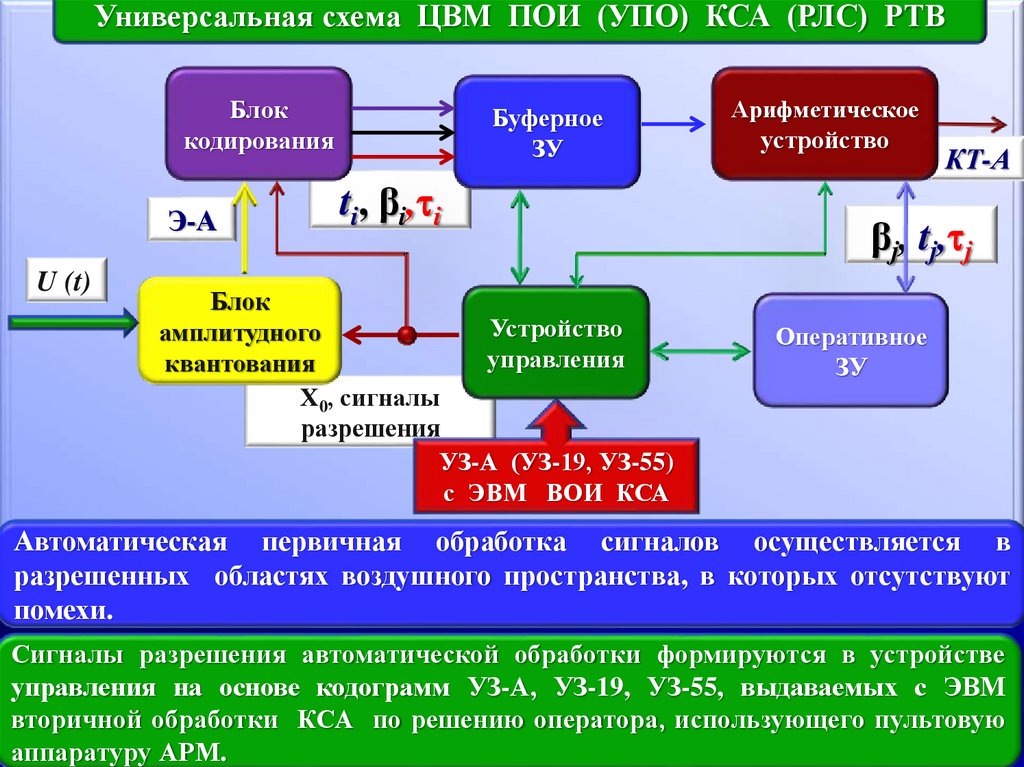
Автоматическая первичная обработка сигналов осуществляется в
разрешенных областях воздушного пространства, в которых отсутствуют
помехи.
Сигналы разрешения автоматической обработки формируются в устройстве
управления на основе кодограмм УЗ-А, УЗ-19, УЗ-55, выдаваемых с ЭВМ
вторичной обработки КСА по решению оператора, использующего пультовую
аппаратуру АРМ.
47.
Кодограммы УЗ-А, УЗ-19, УЗ-55, УЗ-ПС содержат информацию:Номера
слов
Номера разрядов
0
1
2
3
4
5
6
7
1
№ канала
2
Номер управляемой зоны
9
k/m-l
10
11
12
13
14
15
16
17
18
19
20
21
Вид УЗ
Дальность начала зоны (Днз)
Дальность конца зоны (Дкз)
3
4
8
Уровень отсечки Х0
Управляемая зона
бланка
Управляемая зона
автозахвата
Ширина зоны по азимуту (∆βз)
22
23
48.
В процессе функционирования УПО КСА (РЛС) РТВИЗ, ИКД
МАИ, ОС
Блок
кодирования
Э-А
U (t)
Буферное
ЗУ
ti, βi, i
Блок
амплитудного
квантования
устройство
КТ-А
βj, tj, j
Устройство
управления
Х0, сигналы
разрешения
Арифметическое
Оперативное
ЗУ
1.
В блоке амплитудного квантования на основе заданного в кодограмме
УЗ-А порога отсечки формируются нормированные по амплитуде эхосигналы Э-А.
2.
После селекции по разрешенным зонам квантованные сигналы Э-А
кодируются по азимуту, времени задержки, длительности. Полученные
коды в порядке их поступления записываются в БЗУ.
3.
В АУ для формирования пачек на каждом цикле обработки сопоставляются
коды сигналов текущего зондирования, проступающие с БЗУ, с кодами
сигналов предыдущих зондирований, хранящимися в ОЗУ.
49.
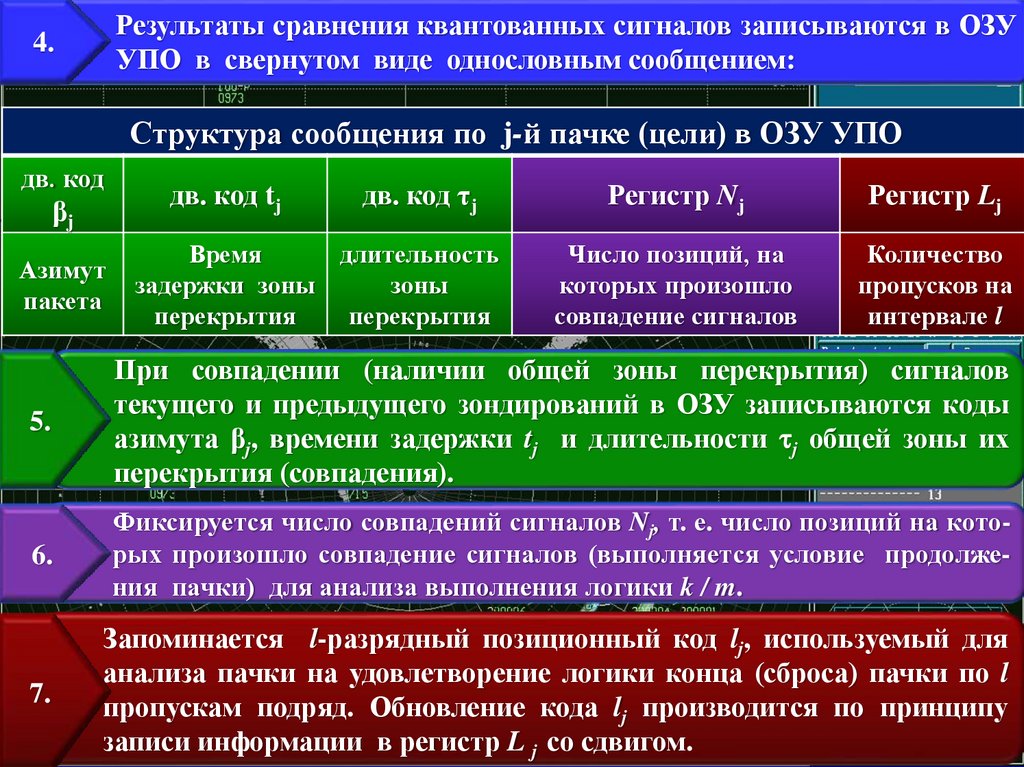
Результаты сравнения квантованных сигналов записываются в ОЗУУПО в свернутом виде однословным сообщением:
4.
Структура сообщения по j-й пачке (цели) в ОЗУ УПО
дв. код
βj
Азимут
пакета
дв. код tj
дв. код τj
Время
длительность
задержки зоны
зоны
перекрытия
перекрытия
Регистр Nj
Регистр Lj
Число позиций, на
которых произошло
совпадение сигналов
Количество
пропусков на
интервале l
5.
При совпадении (наличии общей зоны перекрытия) сигналов
текущего и предыдущего зондирований в ОЗУ записываются коды
азимута βj, времени задержки tj и длительности j общей зоны их
перекрытия (совпадения).
6.
Фиксируется число совпадений сигналов Nj, т. е. число позиций на которых произошло совпадение сигналов (выполняется условие продолжения пачки) для анализа выполнения логики k / m.
7.
Запоминается l-разрядный позиционный код lj, используемый для
анализа пачки на удовлетворение логики конца (сброса) пачки по l
пропускам подряд. Обновление кода lj производится по принципу
записи информации в регистр L j со сдвигом.
50.
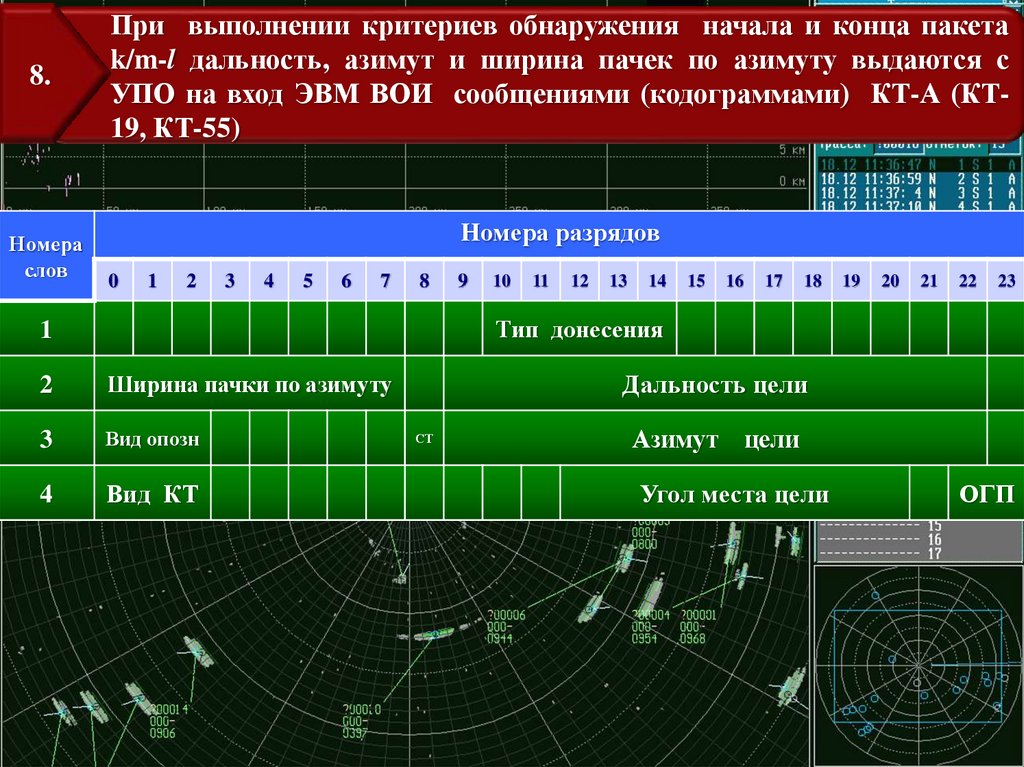
8.Номера
слов
При выполнении критериев обнаружения начала и конца пакета
k/m-l дальность, азимут и ширина пачек по азимуту выдаются с
УПО на вход ЭВМ ВОИ сообщениями (кодограммами) КТ-А (КТ19, КТ-55)
Номера разрядов
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Тип донесения
1
2
Ширина пачки по азимуту
3
Вид опозн
4
Вид КТ
Дальность цели
СТ
Азимут
цели
Угол места цели
ОГП
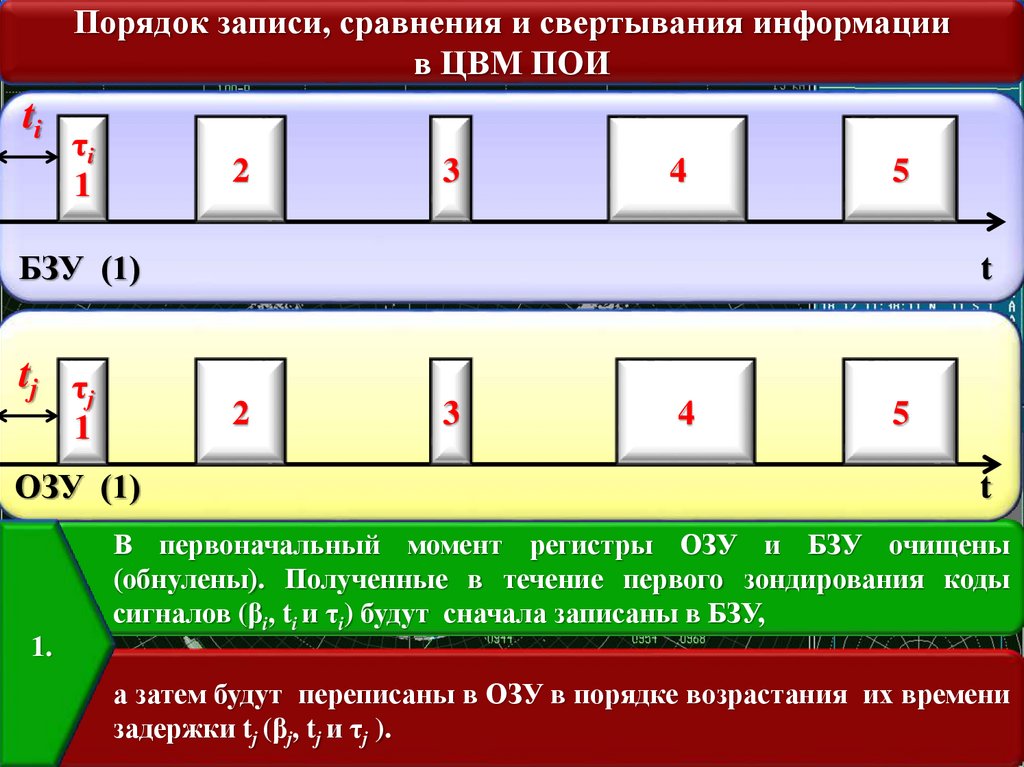
51.
Порядок записи, сравнения и свертывания информациив ЦВМ ПОИ
ti
τi
1
2
3
4
5
БЗУ (1)
tj τj
t
2
1
ОЗУ (1)
3
4
5
t
В первоначальный момент регистры ОЗУ и БЗУ очищены
(обнулены). Полученные в течение первого зондирования коды
сигналов (βi, ti и τi) будут сначала записаны в БЗУ,
1.
а затем будут переписаны в ОЗУ в порядке возрастания их времени
задержки tj (βj, tj и τj ).
52.
tjτj
1
2
3
4
5
ОЗУ (1)
ti
БЗУ (2)
t
τi
1
2
3
t
τj
1
ОЗУ (2)
2а
t
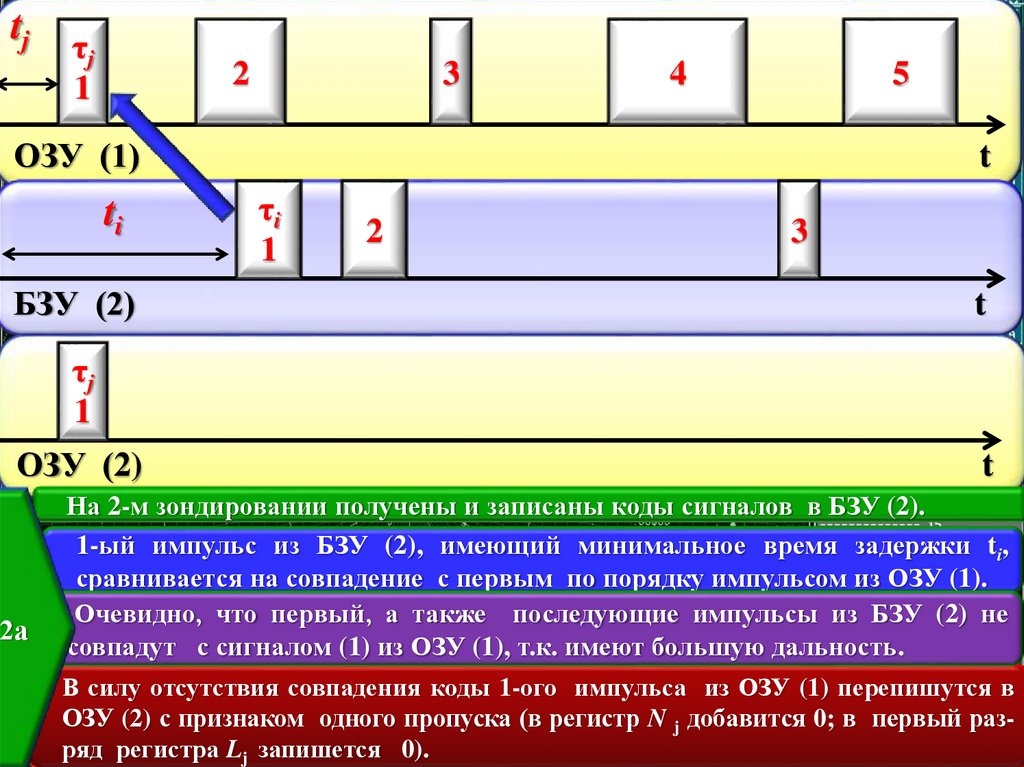
На 2-м зондировании получены и записаны коды сигналов в БЗУ (2).
1-ый импульс из БЗУ (2), имеющий минимальное время задержки ti,
сравнивается на совпадение с первым по порядку импульсом из ОЗУ (1).
Очевидно, что первый, а также последующие импульсы из БЗУ (2) не
совпадут с сигналом (1) из ОЗУ (1), т.к. имеют большую дальность.
В силу отсутствия совпадения коды 1-ого импульса из ОЗУ (1) перепишутся в
ОЗУ (2) с признаком одного пропуска (в регистр N j добавится 0; в первый разряд регистра Lj запишется 0).
53.
tjτj
1
2
3
4
5
ОЗУ (1)
Δτj
t
1
2
3
БЗУ (2)
τj
Δτj
1
ОЗУ (2)
t
2
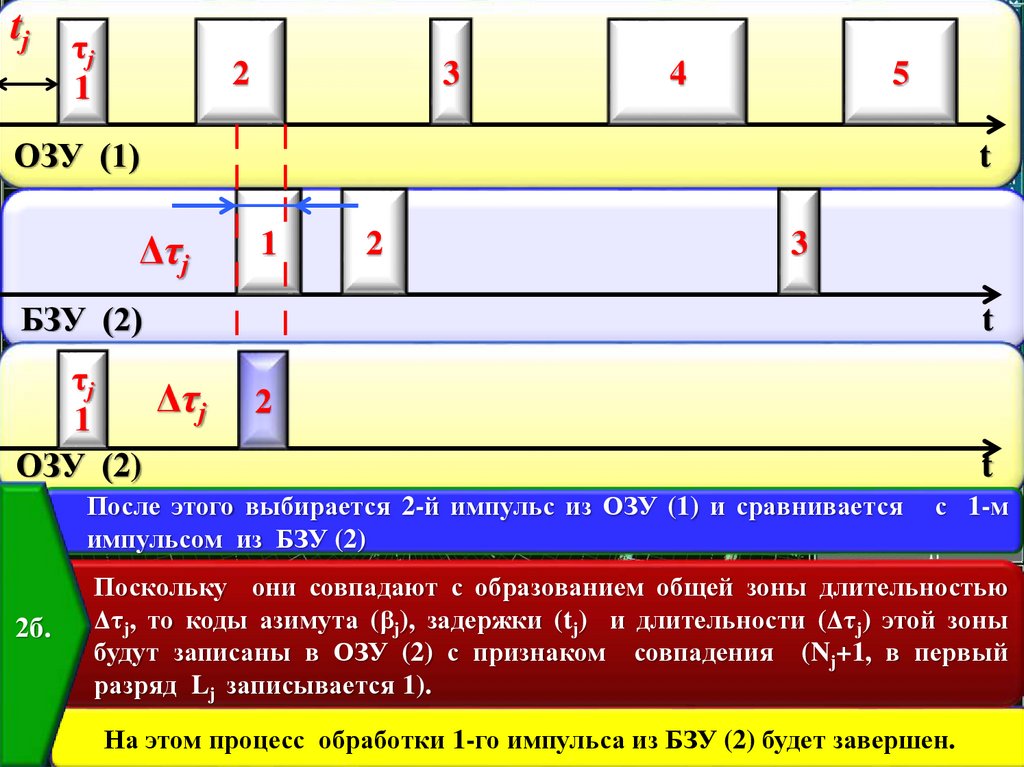
После этого выбирается 2-й импульс из ОЗУ (1) и сравнивается
импульсом из БЗУ (2)
2б.
t
с 1-м
Поскольку они совпадают с образованием общей зоны длительностью
Δτj, то коды азимута (βj), задержки (tj) и длительности (Δτj) этой зоны
будут записаны в ОЗУ (2) с признаком совпадения (Nj+1, в первый
разряд Lj записывается 1).
На этом процесс обработки 1-го импульса из БЗУ (2) будет завершен.
54.
tjτj
1
2
3
4
5
ОЗУ (1)
t
1
2
3
БЗУ (2)
τj
1
ОЗУ (2)
t
2
3
4
t
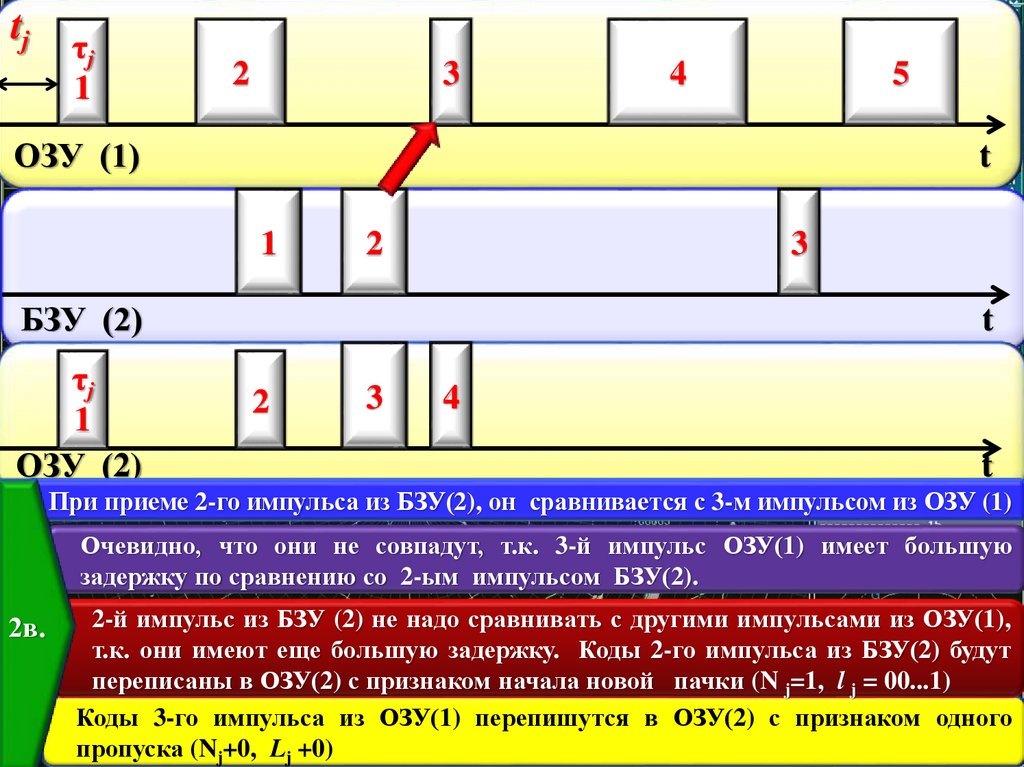
При приеме 2-го импульса из БЗУ(2), он сравнивается с 3-м импульсом из ОЗУ (1)
Очевидно, что они не совпадут, т.к. 3-й импульс ОЗУ(1) имеет большую
задержку по сравнению со 2-ым импульсом БЗУ(2).
2в.
2-й импульс из БЗУ (2) не надо сравнивать с другими импульсами из ОЗУ(1),
т.к. они имеют еще большую задержку. Коды 2-го импульса из БЗУ(2) будут
переписаны в ОЗУ(2) с признаком начала новой пачки (N j=1, l j = 00...1)
Коды 3-го импульса из ОЗУ(1) перепишутся в ОЗУ(2) с признаком одного
пропуска (Nj+0, Lj +0)
55.
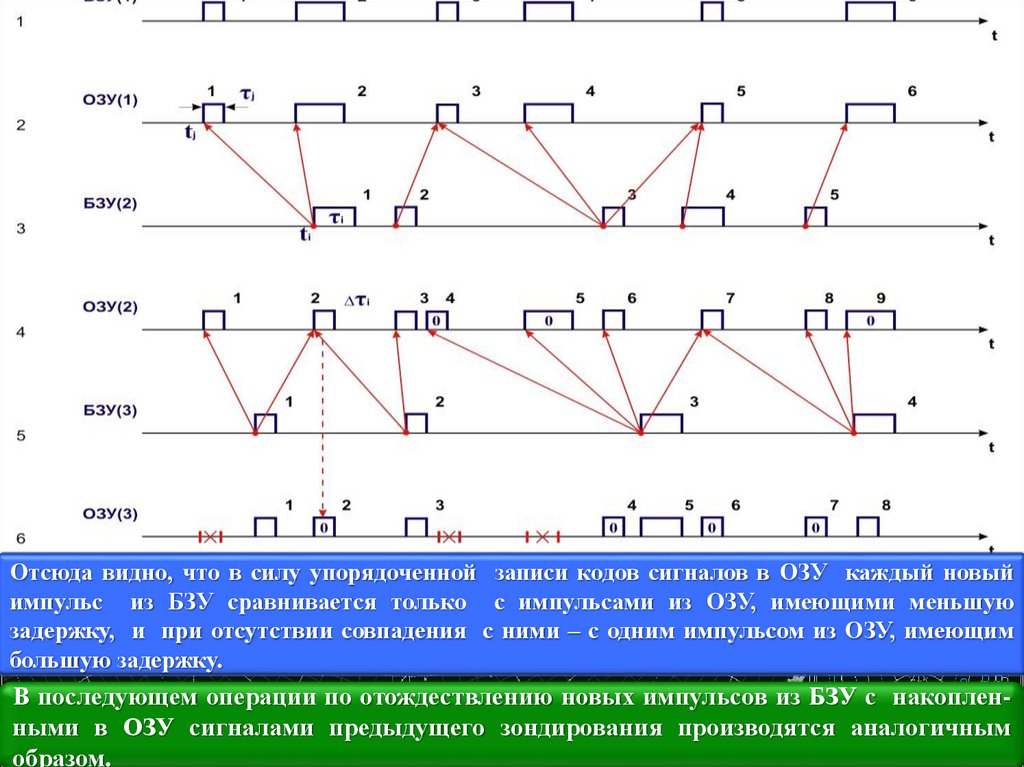
Отсюда видно, что в силу упорядоченной записи кодов сигналов в ОЗУ каждый новыйимпульс из БЗУ сравнивается только с импульсами из ОЗУ, имеющими меньшую
задержку, и при отсутствии совпадения с ними – с одним импульсом из ОЗУ, имеющим
большую задержку.
В последующем операции по отождествлению новых импульсов из БЗУ с накопленными в ОЗУ сигналами предыдущего зондирования производятся аналогичным
образом.
56.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТВыводы по учебному вопросу
В
рассмотренном
примере
обработки
эхо-сигналов
для
решения
задач
автоматического обнаружения цели и определения её координат используются
принцип квантования РЛ сигналов без дискретизации по времени и
принцип
безвесовой обработки k/m-l.
Комплексное применение указанных
принципов
позволило
синтезировать
универсальную схему автоматического УПО, арифметическое устройство которого
обеспечивает обработку информации по всей зоне обнаружения РЛС на основе
алгоритма цифрового накопления квантованных сигналов.
56
57.
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТСПАСИБО
ЗА ВНИМАНИЕ
57