 Электроника
ЭлектроникаПохожие презентации:


")







Телемеханика в ЭСБ. Тема 6. Основные понятия и принципы построения систем телемеханики (Часть 1)
1.
РАЗДЕЛ 3. ТЕЛЕМЕХАНИКАВ ЭСБ
Дисциплина:
«АВТОМАТИКА В ЭЛЕКТРОННЫХ
СИСТЕМАХ БЕЗОПАСНОСТИ»
2.
Тема 6. Основные понятия ипринципы построения
систем телемеханики
(Часть 1)
Дисциплина:
«АВТОМАТИКА В ЭЛЕКТРОННЫХ
СИСТЕМАХ БЕЗОПАСНОСТИ»
3.
Основные понятия, термины и методытелемеханики
Телемеханика – отрасль науки и техники,
охватывающая теорию и технические средства
контроля и управления объектами на расстоянии с
применением специальных преобразователей сигналов
для эффективного использования каналов связи. В
телемеханике передача информации осуществляется
без непосредственного участия человека, человекоператор находится в пункте управления, где
принимает информацию о состоянии контролируемых
объектов, а также может вырабатывать команды
управления.
4.
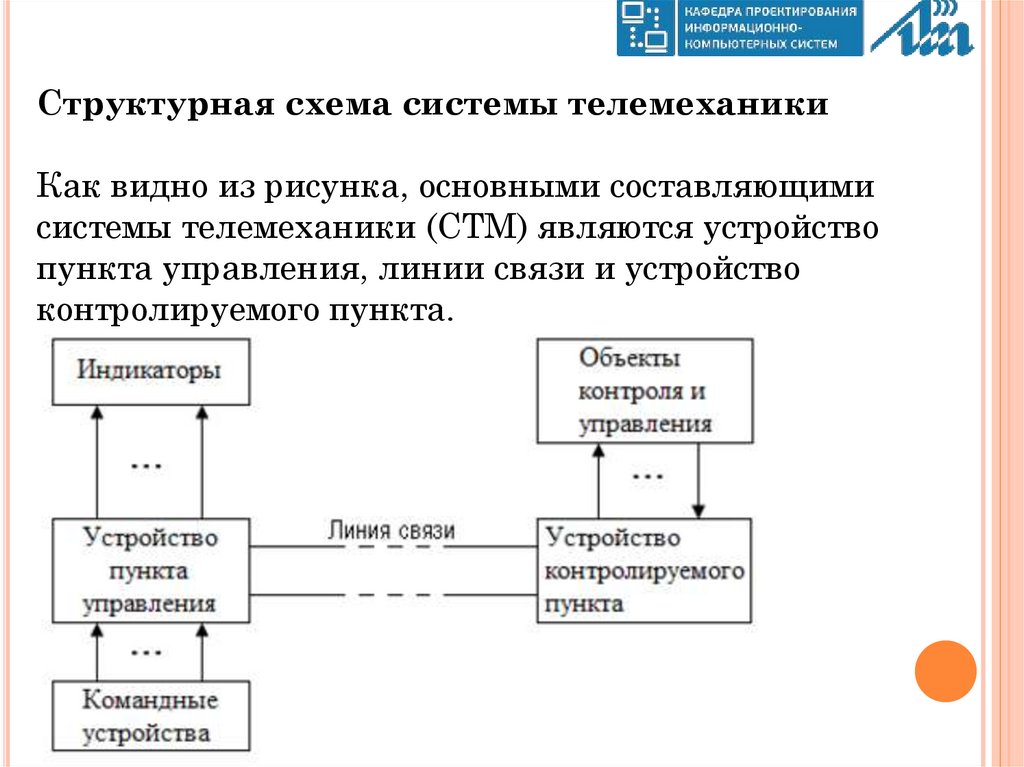
Cтруктурная схема системы телемеханикиКак видно из рисунка, основными составляющими
системы телемеханики (СТМ) являются устройство
пункта управления, линии связи и устройство
контролируемого пункта.
5.
В телемеханике широко используются следующиепонятия:
• Контролируемый телемеханический пункт (КП) –
место размещения объектов, контролируемых или
управляемых средствами телемеханики;
• Телемеханический пункт управления (ПУ) – это
место, с которого осуществляется управление или
контроль состояния объектов, расположенных на
контролируемом пункте;
• Устройство телемеханики – совокупность
технических средств телемеханики, расположенных
на телемеханическом пункте управления или
контролируемом телемеханическом пункте;
6.
• Комплекс устройств телемеханики – совокупностьустройств пунктов управления и контролируемых
пунктов, предназначенных для совместного
применения в телемеханических системах.
• Телемеханическая система – совокупность устройств
пунктов управления и контролируемых пунктов,
периферийного оборудования, необходимых линий и
каналов связи, предназначенных для совместного
выполнения телемеханических функций.
7.
Объект телемеханики – это технологический процесс,техническое устройство, состояние которого
контролируется или управляется средствами
телемеханики. Объекты бывают:
• Непрерывные объекты, в которых процессы
протекают непрерывно и выходная величина
является непрерывной.
• Дискретные объекты, в которых процессы протекают
дискретно и выходная величина является
дискретной.
• Дискретно-непрерывные объекты, в которых в
пределах дискретного состояния технологические
процессы протекают непрерывно.
8.
• Сосредоточенные объекты, располагающиеся нанебольшом расстоянии или площади, например,
промышленное предприятие нефтехимического или
машиностроительного производства;
• Распределённые объекты, располагающиеся на
больших площадях или расстояниях, например,
нефтяное или газовое месторождение,
ирригационные системы, сети передачи
электрической энергии и другие.
9.
Телеизмерение (ТИ) – получение информации означениях измеряемых параметров контролируемых и
управляемых объектов методами и средствами
телемеханики. ТИ как область техники и технических
наук одновременно является частью измерительной
техники и телемеханики.
Телеизмерение отличается от обычных электрических
измерений, которые не могут быть применены для
измерения на расстоянии вследствие возникновения
погрешностей из-за изменения параметров линии
связи, окружающей среды и действия помех. Методы
телеизмерения позволяют уменьшить погрешность при
передаче измеряемых величин на большие расстояния,
а также многократно использовать линию связи.
10.
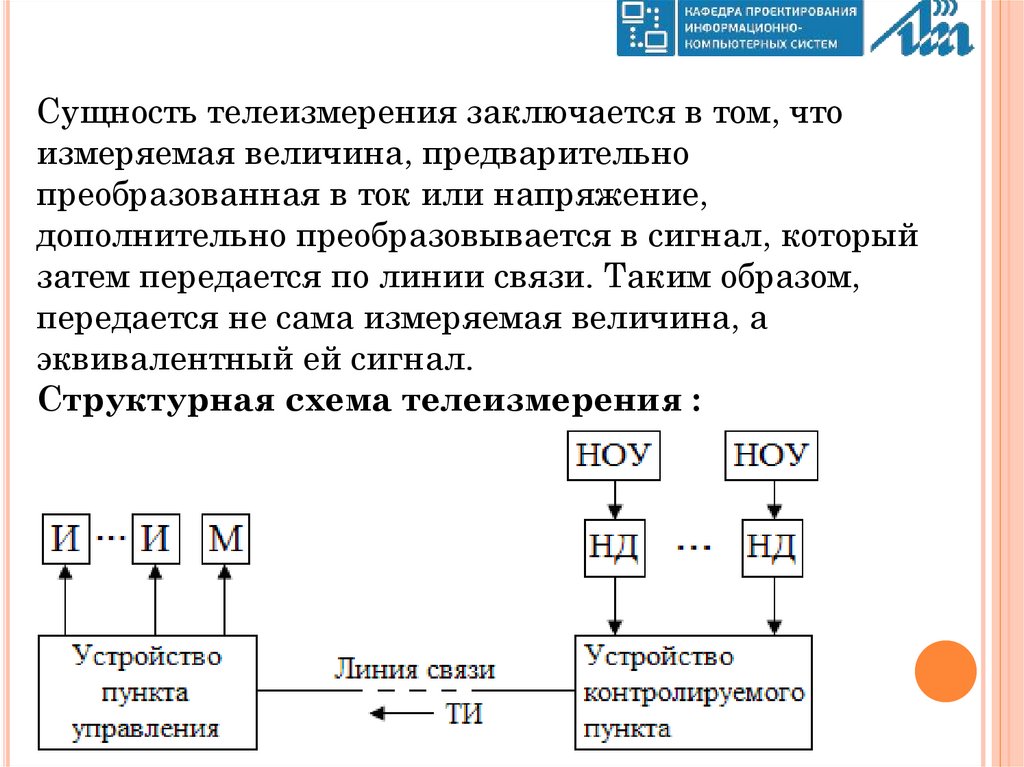
Сущность телеизмерения заключается в том, чтоизмеряемая величина, предварительно
преобразованная в ток или напряжение,
дополнительно преобразовывается в сигнал, который
затем передается по линии связи. Таким образом,
передается не сама измеряемая величина, а
эквивалентный ей сигнал.
Структурная схема телеизмерения :
11.
Измеряемая величина X преобразуется с помощьюдатчика (первичного преобразователя) в электрическую
величину UД1 (ток, напряжение, и др.). Выходные
сигналы от датчиков подаются на канальные
преобразователи, где преобразуются к единому
(унифицированному) параметру UC1 (напряжение 0…5
В, напряжение 0…10 В, ток 0…100 мА), принятому для
данной системы. Параметр UC1 преобразуется в
передатчике методом кодирования и модуляции в
параметр сигнала UУ1, пригодный для передачи по
линии связи. Передатчик согласовывает параметр UC1 с
линией (каналом) связи.
12.
На приемной стороне сигнал UУ2 (он отличается от UУ1за счет воздействия помех в линии связи) поступает на
вход приемника и преобразуется (демодулируется и
декодируется) в величину UC2, которая преобразуется в
значение тока или напряжения, которое эквивалентно
измеряемой величине и воспроизводит ее на
регистрирующем приборе.
Совокупность технических средств на передающей,
приемной сторонах и канале связи, необходимых для
автоматического измерения одного или ряда
параметров на расстоянии, включая датчик и
регистрирующий прибор, называется
телеизмерительной системой (СТИ).
Различают телеизмерения: по вызову и выбору,
текущих и интегральных значений.
13.
Телеизмерение по вызову – телеизмерение покоманде, посылаемой с пункта управления (ПУ) на
контролируемый пункт (КП) и вызывающей
подключение на КП передающих устройств, а на ПУ –
соответствующих приемных устройств. Телеизмерение
по вызову позволяет использовать одну линию связи
(канал телеизмерения) для поочередного наблюдения
за многими объектами телеизмерения. На ПУ
показания можно наблюдать на общем выходном
приборе. Если показания имеют различные шкалы, то
измеряемые величины подключаются к разным
приборам. по заданной программе.
14.
Телеизмерение по выбору – ТИ путем подключенияк устройствам ПУ соответствующих приемных приборов
при постоянно подключенных передающих устройствах
на КП.
Телеизмерение текущих параметров (ТИТ) –
получение информации о значении измеряемого
параметра в момент опроса устройством телемеханики.
Телеизмерение интегральных значений (ТИИ) –
получение информации об интегральных значениях
измеряемых величин, проинтегрированных по
заданному параметру, например, времени, в месте
передачи.
15.
Методы телемеханики:Существуют различные методы передачи данных.
Такими методами являются:
• Спорадическая передача данных. Передача данных
инициируется процессом пользователя при
возникновении событий или изменений данных.
Данные имеют обычно небольшую длину и могут
иметь два приоритета - нормальный или
ускоренный. Ускоренные данные обходят
нормальные данные в буферах передачи и не
подлежат контролю потока. Спорадическими
данными являются команды, величины уставки,
аварийные сигналы, телесигналы и измерения.
16.
• Блочная спорадическая передача данных.Аналогична спорадической, за исключением того, что
инициирующий процесс пользователя после
возникновения события или изменения данных
ожидает (обычно <10 с) получения дополнительных
спорадических данных. Данные могут быть любого
типа. Собранные данные объединяются процессом
пользователя в блоки, чтобы обеспечить более
эффективную и однозначную передачу данных.
Объединение в блоки может быть различным по
времени сбора и количеству данных.
17.
• Периодическая передача данных. Передача данныхинициируется процессом пользователя периодически
с постоянным периодическим интервалом. В каждый
период передаются те же самые данные независимо
от того, изменились они или нет. Обычно
периодическими данными являются измерения и
показания счетчиков.
• Спорадическая передача данных в периодических
интервалах. Передача данных инициируется
процессом пользователя периодически с постоянным
периодическим интервалом, как указано для п.3, но
передаются не все данные, а только спорадические.
Это позволяет более эффективно использовать
ресурсы связи.
18.
• Запрос данных. Передача данных инициируетсяодним процессом пользователя с помощью запроса к
соответствующему другому процессу пользователя.
Запрос может управляться событием, например,
вводимым вручную или по периодическому графику.
• Контроль времени существования данных. Если
сообщения слишком долго находятся в системе связи,
могут иметь место два различных отрицательных
последствия: информация, содержащаяся в
сообщении, может оказаться устаревшей, а также в
системе связи такие сообщения могут способствовать
переполнению сети. Поэтому необходим механизм
для измерения времени, в течение которого
сообщение находится в системе связи, и процедуры
удаления сообщений, которые достигают места
назначения позже заданного времени.
19.
• Группирование данных и управление (контроль).Подсистема связи должна предусматривать средства
для определения, согласования и управления
группированием данных для передачи.
• Возможны два основных класса:
Пространственное группирование – определение
полностью определенного, адресуемого набора
переменных процесса и/или системы для
передачи как одного целого;
Временное группирование – запоминание
сообщений за фиксированный период времени
для передачи как одного целого.
20.
Телемеханические функцииСогласно ГОСТ 26.005-82 телеуправление (ТУ) –
управление положением или состоянием дискретных
объектов и объектов с непрерывным множеством
состояний методами и средствами телемеханики.
Телеуправление подразделяется на двухпозиционное
и многопозиционное.
Двухпозиционное телеуправление –
телеуправление объектами, имеющими два возможных
состояния.
Многопозиционное телеуправление –
телеуправление объектами, имеющими более двух
возможных состояний.
21.
Для выполнения телеуправления согласно ГОСТ26.005-82 могут быть использованы следующие
приказы:
• Команда телеуправления – телемеханическое
сообщение, передаваемое с пункта управления на
контролируемые пункты и вызывающее изменение
положения или состояния объектов.
• Групповая команда телеуправления – команда
телеуправления, адресованная нескольким объектам
одного контролируемого пункта.
22.
• Циркулярная команда телеуправления – командателеуправления, адресованная объектам нескольких
или всех контролируемых пунктов телемеханической
системы.
• Команда-инструкция – команда телеуправления,
передаваемая с пункта управления на
контролируемые пункты оперативному персоналу,
где она выводится на устройства отображения в виде
стандартных инструкций.
• Телемеханическая команда опроса –
телемеханическое сообщение, требующее от
контролируемого пункта передачи информации о
состоянии объектов.
23.
Тип телемеханической функции, реализуемой системойтелемеханики, зависит от типа объекта. Различают
следующие типы телемеханических функций.
Телемеханическая функция телеизмерения (ТИ) –
это передача текущих значений непрерывных величин.
Применяется для непрерывных объектов. Информация
с непрерывных датчиков, установленных на объектах,
поступает в устройство контролируемого пункта, далее
по линии связи передаётся в устройство диспетчерского
пункта управления, где отображается с помощью
индикаторов, а также может вводиться в ЭВМ,
регистрироваться специальными приборами.
24.
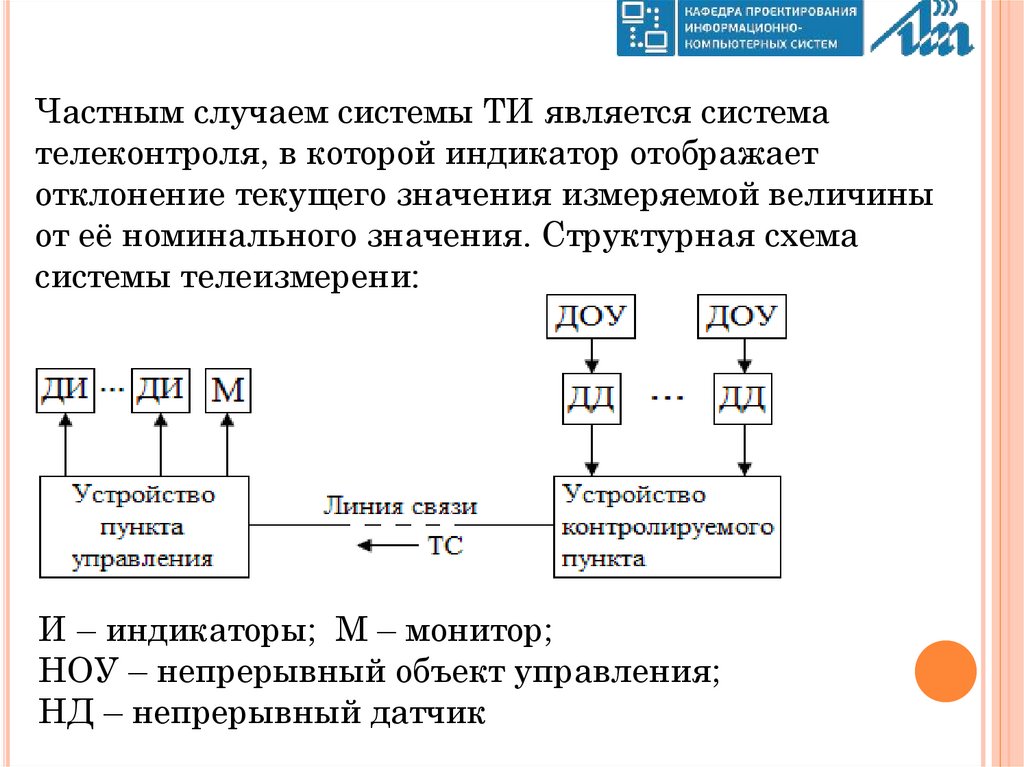
Частным случаем системы ТИ является системателеконтроля, в которой индикатор отображает
отклонение текущего значения измеряемой величины
от её номинального значения. Структурная схема
системы телеизмерени:
И – индикаторы; М – монитор;
НОУ – непрерывный объект управления;
НД – непрерывный датчик