 Электроника
ЭлектроникаПохожие презентации:







")

. Автоматизированное управление ХТС. Лекция 3")
Телемеханика в ЭСБ. Тема 1. Общие сведения о подсистемах автоматического управления и организации их функционирования в ЭСБ
1.
РАЗДЕЛ 3. ТЕЛЕМЕХАНИКАВ ЭСБ
Дисциплина:
«АВТОМАТИКА В ЭЛЕКТРОННЫХ
СИСТЕМАХ БЕЗОПАСНОСТИ»
2.
Тема 1. Общие сведения оподсистемах
автоматического управления
и организации их
функционирования в ЭСБ
(Часть 1)
Дисциплина:
«АВТОМАТИКА В ЭЛЕКТРОННЫХ
СИСТЕМАХ БЕЗОПАСНОСТИ»
3.
Виды, классификация и основныехарактеристики систем автоматического
управления (САУ)
Теория автоматического управления (ТАУ) –
научная дисциплина, которая изучает процессы
автоматического управления объектами разной
физической природы. При этом при помощи
математических средств выявляются свойства систем
автоматического управления и разрабатываются
рекомендации по их проектированию.
4.
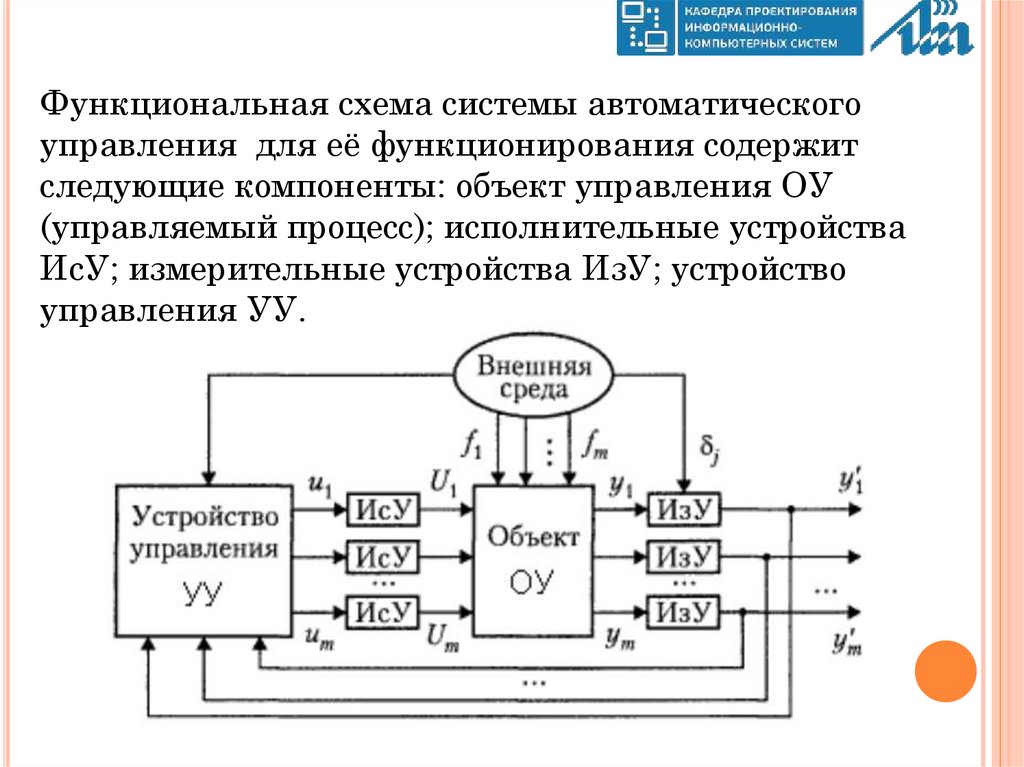
Функциональная схема системы автоматическогоуправления для её функционирования содержит
следующие компоненты: объект управления ОУ
(управляемый процесс); исполнительные устройства
ИсУ; измерительные устройства ИзУ; устройство
управления УУ.
5.
Объектами управления технических системявляются:
• кинематические механизмы;
• электрические системы;
• тепловые процессы;
• химические процессы и другие.
К регулируемым, или выходным, переменным yj = yj (t)
относятся переменные ОУ, по отношению к которым
формулируется основная задача управления.
Входами ОУ являются управляющие органы, к которым
прикладываются воздействия Uj исполнительных
устройств ИсУ системы.
6.
К внешней среде системы управления относятсяпроцессы, оказывающие влияние на поведение
управляемого объекта. Среда является источником
помех измерения j(t), возмущающих воздействий fj(t) ,
внешних задающих воздействий.
К возмущающим относят воздействия,
препятствующие функционированию объекта. Это могут
быть силы сопротивления или трения для
кинематических механизмов, температура окружающей
среды для тепловых процессов и т. д.
7.
Измерительные устройства ИзУ (датчики)предназначены для получения информации об объекте
и внешней среде (сигналов y'j ), т. е. для электрического
измерения выходных переменных, переменных
состояния и внешних задающих воздействий.
Типы измерительных устройств:
• датчики внутренней информации,
предназначенные для измерения переменных
объекта (системы управления);
• датчики внешней информации (сенсоры, средства
внешнего контроля) - измерители состояния внешней
среды либо положения объекта по отношению к
внешним объектам.
8.
Исполнительные устройства ИсУ – это устройства,предназначенные для усиления маломощных
управляющих сигналов uj и создания энергетических
воздействий Uj на входах объекта.
Устройство управления УУ – это блок,
обрабатывающий полученную с помощью измерителей
текущую информацию о состоянии объекта и внешней
среды и формирующий управляющие воздействия Uj
(информационные сигналы), поступающие на
исполнительные устройства объекта.
Функции устройства управления:
• идентификация объекта и среды (анализ их текущего
состояния и параметров);
• генерация внутренних задающих воздействий;
• расчет управляющих воздействий Uj по
предписанным формулам (алгоритмам).
9.
Классификация систем и элементовПо характеру действия различают:
• Система автоматического управления (САУ);
• Система автоматического регулирования (САР);
• Система автоматического контроля (САК);
• Система автоматической защиты (САЗ).
По характеристикам звеньев, входящих в
систему:
• Линейные;
• Нелинейные;
• Импульсные;
• Релейно–импульсные.
10.
По характеру движения:• простые системы управления (СУ) (нагрев печи);
• системы оптимального управления, при котором
движение координат ОУ к заданной точке протекает
за определенное время (когда скорость нагрева печи
ограничена технологическим процессом);
• системы программного управления: движение
осуществляется по заданной программе
(металлорежущие станки);
• системы экстремального управления (системы, в
которых самостоятельно определяется наиболее
выгодный режим работы ОУ);
• системы функционального управления (когда
движение начинается при выполнении совокупности
операций).
11.
12.
По виду управляющих воздействий:• аналоговые;
• дискретные (прерывные, импульсные, цифровые).
По степени участия человека:
• ручные;
• автоматические;
• автоматизированные (человек в управлении).
По количеству управляемых и регулируемых
переменных:
• одномерные;
• многомерные.
По воздействию чувствительного
(измерительного) элемента на регулирующий
орган:
• системы прямого управления;
• системы косвенного управления.
13.
Четыре основных принципа автоматическогорегулирования:
• разомкнутого управления;
• по возмущению;
• по отклонению;
• комбинированный.
14.
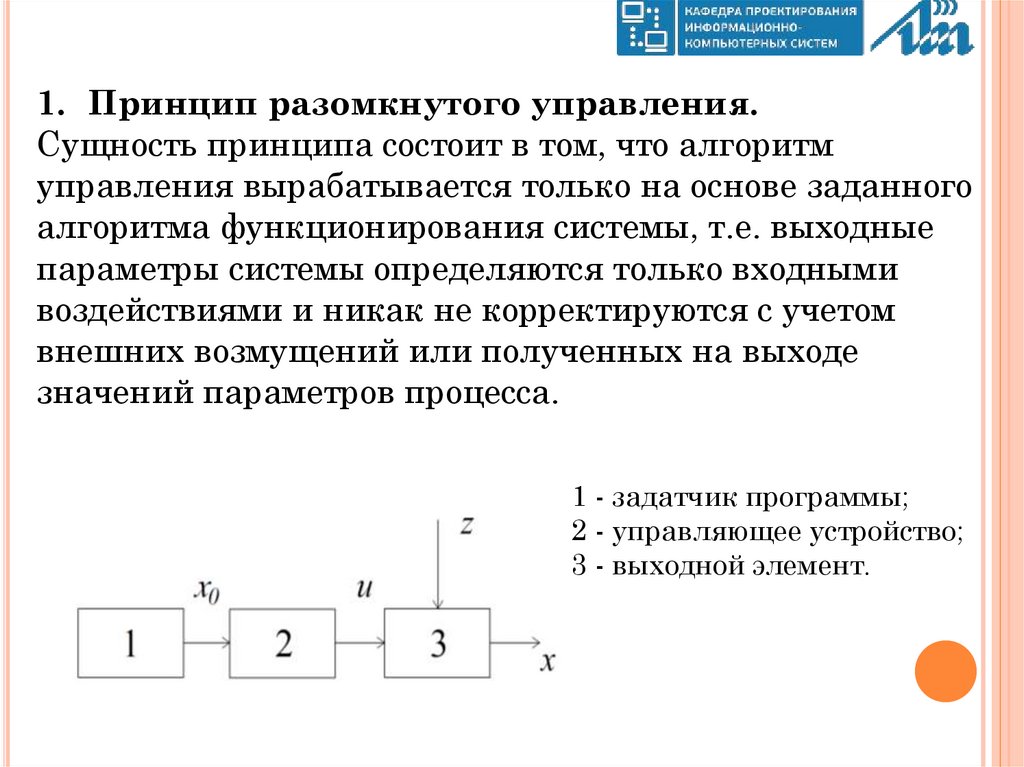
1. Принцип разомкнутого управления.Сущность принципа состоит в том, что алгоритм
управления вырабатывается только на основе заданного
алгоритма функционирования системы, т.е. выходные
параметры системы определяются только входными
воздействиями и никак не корректируются с учетом
внешних возмущений или полученных на выходе
значений параметров процесса.
1 - задатчик программы;
2 - управляющее устройство;
3 - выходной элемент.
15.
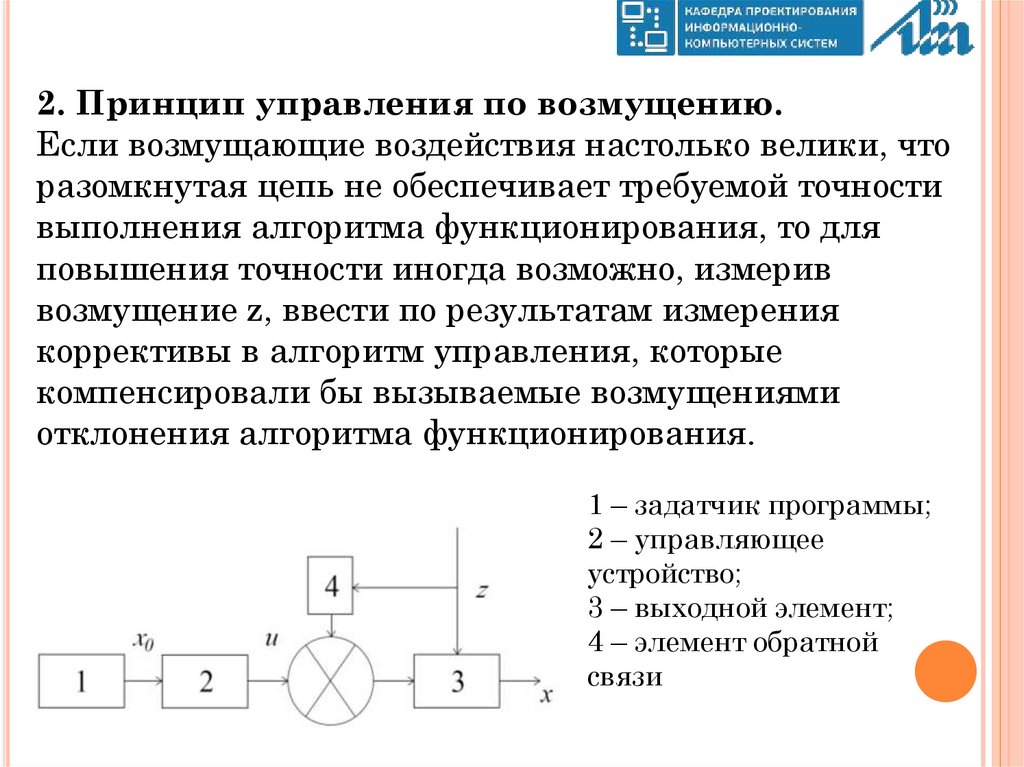
2. Принцип управления по возмущению.Если возмущающие воздействия настолько велики, что
разомкнутая цепь не обеспечивает требуемой точности
выполнения алгоритма функционирования, то для
повышения точности иногда возможно, измерив
возмущение z, ввести по результатам измерения
коррективы в алгоритм управления, которые
компенсировали бы вызываемые возмущениями
отклонения алгоритма функционирования.
1 – задатчик программы;
2 – управляющее
устройство;
3 – выходной элемент;
4 – элемент обратной
связи
16.
Преимущество САР по возмущению –быстродействие, т.к. они компенсируют влияние
возмущающего воздействия до того, как оно изменит
регулируемую величину.
Недостатки САР по возмущению:
• ограниченность применения, т.к. эти системы
применимы лишь в том случае, когда на
регулируемую величину существенно влияет мало
(1–2) возмущений, и есть возможность измерения
этих возмущений;
• невысокая точность поддержания регулируемой
величины на заданном уровне из-за невозможности
учесть влияние всех возмущений.
17.
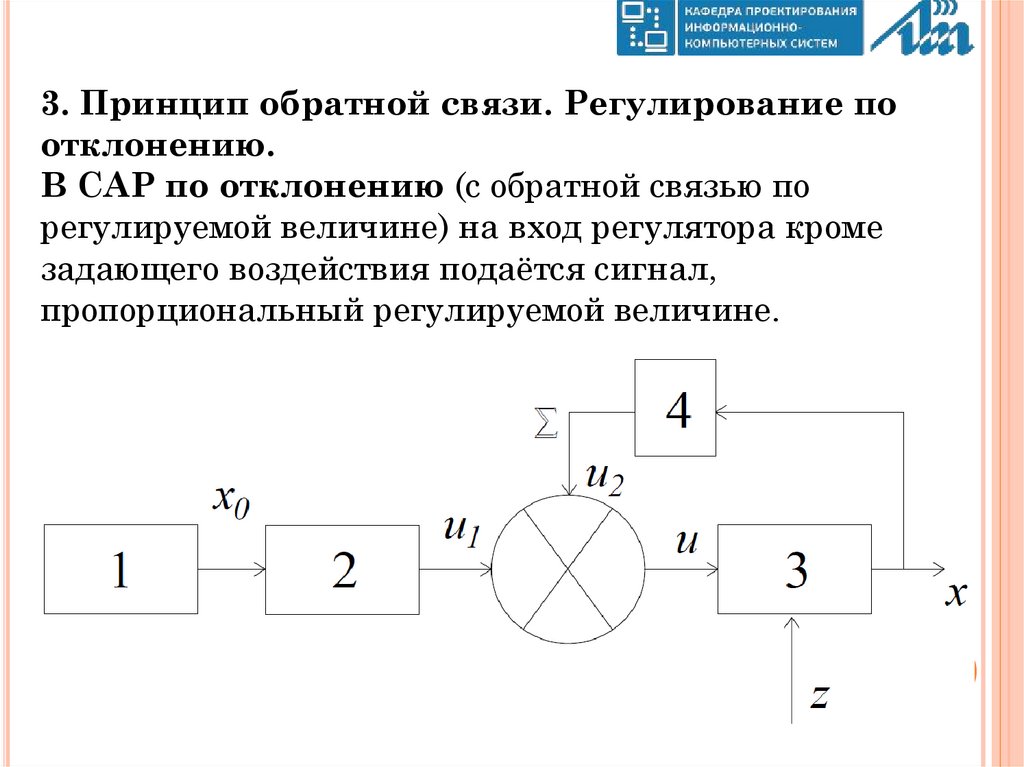
3. Принцип обратной связи. Регулирование поотклонению.
В САР по отклонению (с обратной связью по
регулируемой величине) на вход регулятора кроме
задающего воздействия подаётся сигнал,
пропорциональный регулируемой величине.
18.
Преимущество САР по отклонению – дляуправления используется сигнал соответствующий
регулируемой величине, поэтому при выработке
управляющих воздействий учитывается влияние на
регулируемую величину всех возмущающих
воздействий. Это позволяет поддерживать
регулируемую величину с высокой точностью.
Недостатки САР по отклонению:
наличие обратной связи может вызвать недопустимые
колебания регулируемой величины;
система может стать неустойчивой (чаще всего из-за
запаздывания объекта регулирования).
19.
4. В комбинированных системах одновременноиспользуются принцип регулирования по возмущению
и по отклонению.
Управляющее воздействие в комбинированных САР
зависит от отклонения текущего значения
регулируемой величины от заданного и величины
возмущения.
20.
Достоинства комбинированных САР (сочетаютдостоинства САР по возмущению и по
отклонению):
• как замкнутые по регулируемой величине САР
имеют высокую точность поддержания регулируемой
величины в установившемся режиме;
• за счёт составляющей управляющего воздействия,
соответствующей основному возмущению, парирует
действие возмущения на регулируемую величину.
Это уменьшает отклонение регулируемой величины
в переходных режимах и повышает устойчивость и
быстродействие САР.