


 Физика
Физика Электроника
ЭлектроникаПохожие презентации:










Индуктивные бесконтактные датчики
1. Индуктивные бесконтактные датчики
Физические принципы, на которых основана работа данноготипа датчиков, позволяют их использовать только с
металлическими объектами.
Принцип работы
В качестве чувствительного элемента выступают индуктивные
катушки (L), которые соединены с конденсатором (С). Вместе они
образуют колебательный контур с резонансной частотой F0,
обычно лежащей в диапазоне частот от 100 кГц до 1 МГц.
Электронная схема датчика поддерживает колебания в цепи с
частотой резонанса согласно следующей формуле:
1
F0
.
2 LC
2.
Эти колебания порождаютпеременное магнитное поле
перед катушкой. Появление
в
зоне
переменного
магнитного
поля
металлического
объекта
приводит к возникновению в
этом
объекте
вихревых
токов, которые в свою
очередь
создают
дополнительную нагрузку,
изменяющую
условия
протекания колебаний в
резонансном контуре (рис.
6).
Рис. 6 Принцип действия
индуктивного датчика
3.
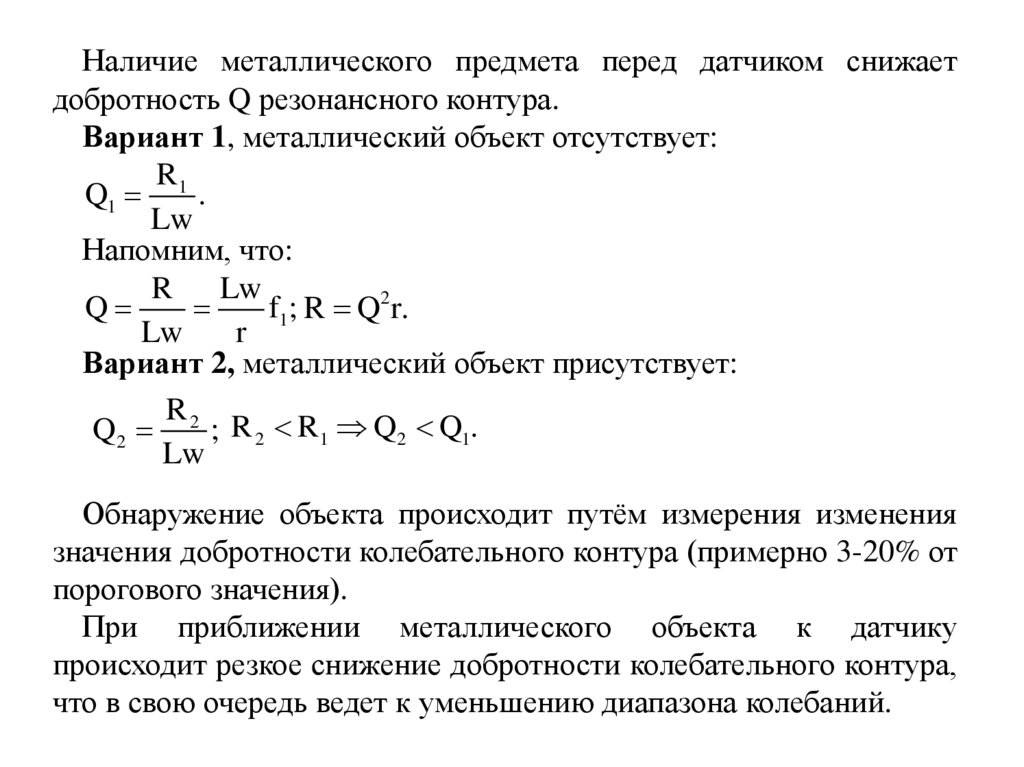
Наличие металлического предмета перед датчиком снижаетдобротность Q резонансного контура.
Вариант 1, металлический объект отсутствует:
R1
Q1
.
Lw
Напомним, что:
R
Lw
Q
f1; R Q2r.
Lw
r
Вариант 2, металлический объект присутствует:
R2
Q2
; R 2 R1 Q2 Q1.
Lw
Обнаружение объекта происходит путём измерения изменения
значения добротности колебательного контура (примерно 3-20% от
порогового значения).
При приближении металлического объекта к датчику
происходит резкое снижение добротности колебательного контура,
что в свою очередь ведет к уменьшению диапазона колебаний.
4.
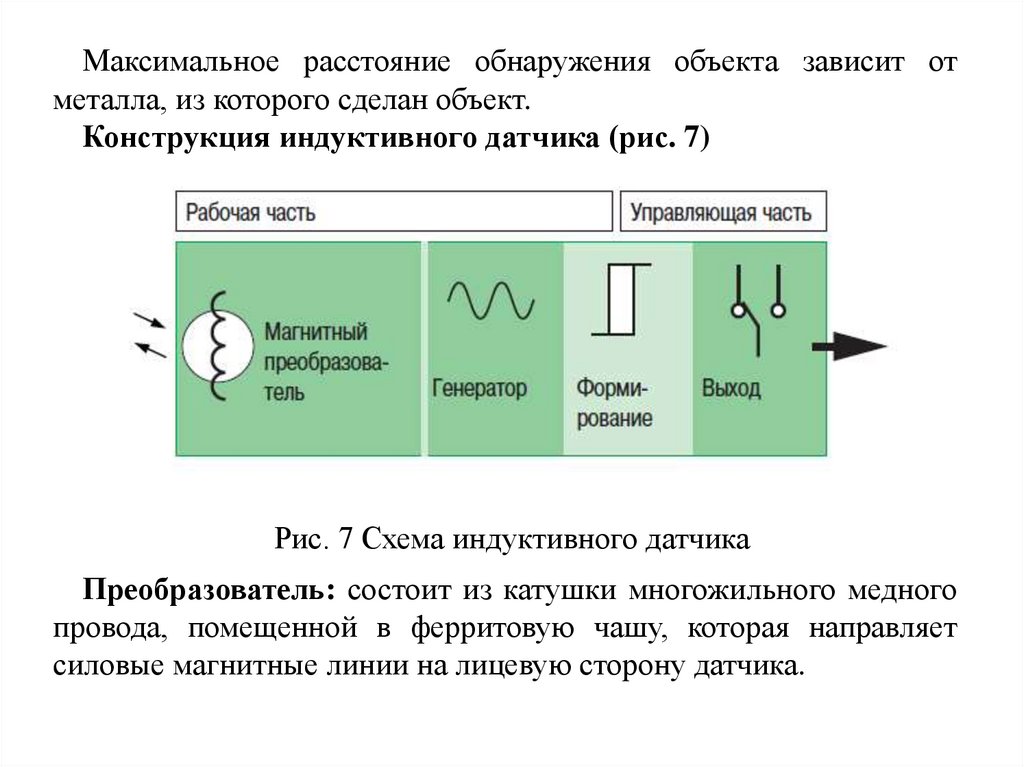
Максимальное расстояние обнаружения объекта зависит отметалла, из которого сделан объект.
Конструкция индуктивного датчика (рис. 7)
Рис. 7 Схема индуктивного датчика
Преобразователь: состоит из катушки многожильного медного
провода, помещенной в ферритовую чашу, которая направляет
силовые магнитные линии на лицевую сторону датчика.
5.
Генератор: Существуют несколько типов генераторов, в том числеи генераторы с постоянным отрицательным сопротивлением -R,
эквивалентным абсолютному значению параллельному резистору
Rp колебательного контура в заданном диапазоне:
• если объект находится за пределами этого диапазона, то |Rp|>IRI, колебания продолжают поддерживаться;
• если объект находится в пределах диапазона |Rp|<I-RI, колебания
перестают поддерживаться, и осциллятор блокируется.
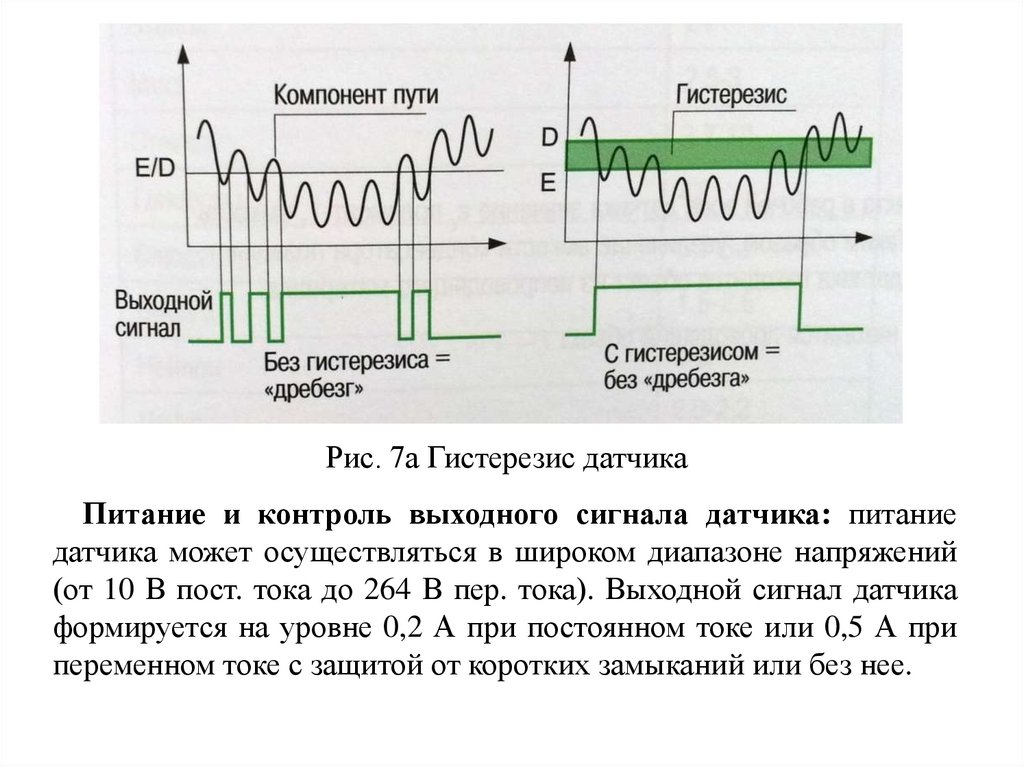
Формирователь сигнала: состоит из детектора пиковых
значений измеряемой величины, контролируемого двухпороговым
компаратором (триггером), для того, чтобы предотвратить
нежелательные переключения датчика «дребезг» в момент
приближения объекта. Формирователь сигнала создает так
называемый гистерезис (рис. 7а).
6.
Рис. 7а Гистерезис датчикаПитание и контроль выходного сигнала датчика: питание
датчика может осуществляться в широком диапазоне напряжений
(от 10 В пост. тока до 264 В пер. тока). Выходной сигнал датчика
формируется на уровне 0,2 А при постоянном токе или 0,5 А при
переменном токе с защитой от коротких замыканий или без нее.
7.
Факторы, влияющие на работу индуктивных датчиковНа работу индуктивных датчиков оказывают влияние
следующий ряд факторов:
• расстояние срабатывания;
• площадь поверхности обнаруживаемого объекта;
• Sn: номинальная зона чувствительности, при работе с объектом
из малоуглеродистой стали варьируется от 0,8 мм (диаметр
датчика 4) до 60 мм (датчик 80x80);
• гистерезис, изменяется в диапазоне от 2 до 10% от Sn для
предотвращения дребезга;
• частота, с которой объекты пересекают рабочую зону датчика,
известная как частота переключения (до 5 кГц).
8.
Специфические функции датчиков• Датчики, защищенные от магнитных полей, создаваемых
сварочными аппаратами;
• Датчики с аналоговым выходом;
• Датчики с поправочным коэффициентом, равным 1*, в этом
случае расстояние срабатывания не зависит от того, из какого
металла сделан объект (черный или цветной);
• Датчики, способные отличать объект из черного металла от
объекта из цветного металла;
• Датчики контроля вращения, реагирующие на частоту вращения
металлического объекта;
• Датчики для взрывоопасной среды (стандарт NAMUR);
*В случае, если объект не из стали, максимальная дистанция
обнаружения должна быть пропорциональна поправочному
коэффициенту для материала, из которого сделан объект.