

 Электроника
ЭлектроникаПохожие презентации:









")
Оптические энкодеры
1.
Оптические энкодерыКонструкция
Вращающийся оптический энкодер — это датчик углового
положения,
включающий
светоизлучающий
диод,
светочувствительное
приемное
устройство
и
диск
с
чередующимися непрозрачными и прозрачными зонами,
физически соединенный валом с обследуемым узлом механизма.
При прохождении прозрачных зон диска свет, излучаемый
светодиодами, попадает на фотодиоды, после чего фотодиоды
вырабатывают электрический сигнал, который затем усиливается
и преобразуется в прямоугольный сигнал перед его передачей в
систему обработки данных. При вращении диска, выходной
сигнал
кодирующего
устройства
принимает
форму
последовательных прямоугольных импульсов.
2.
Рис. 39 Пример оптического энкодера3.
Принцип работыПри
вращении
градуированного
диска
на
выходе
светочувствительного датчика вырабатываются одинаковые
импульсы в зависимости от движения обследуемого объекта.
Разрешение, т.е. количество импульсов на оборот, зависит от
количества делений на диске или кратно этому числу. Чем больше
это значение, тем больше количество измерений на один оборот, и
более точно определяется перемещение или скорость
двигающихся частей, соединенных с энкодером. Типовое
применение: резка по размеру.
Разрешение выражается как:
расстояние, покрываемое за один оборот
количество точек
Например, если разрезаемый объект приводит в движение
мерный ролик 200 мм в окружности, для точности в 1мм
разрешение энкодера должно быть 200 точек. Для точности в 0,5
мм разрешение энкодера должно быть 400 точек.
4.
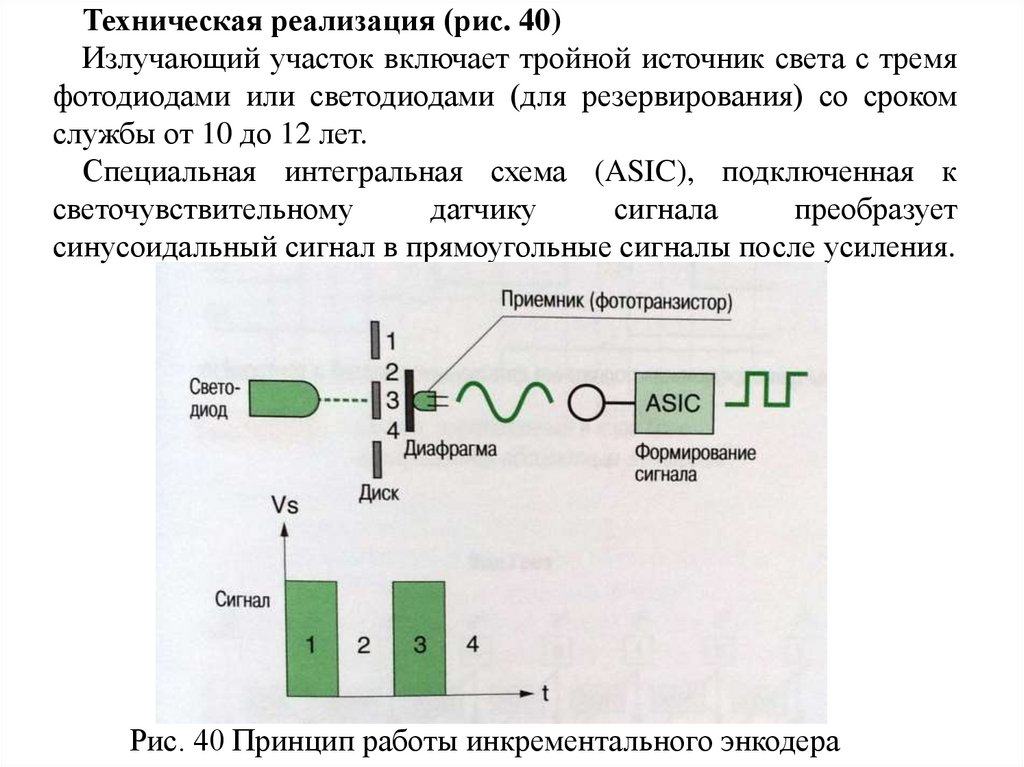
Техническая реализация (рис. 40)Излучающий участок включает тройной источник света с тремя
фотодиодами или светодиодами (для резервирования) со сроком
службы от 10 до 12 лет.
Специальная интегральная схема (ASIC), подключенная к
светочувствительному
датчику
сигнала
преобразует
синусоидальный сигнал в прямоугольные сигналы после усиления.
Рис. 40 Принцип работы инкрементального энкодера
5.
Диск представляет собой прочный диск POLYFASS (Mylarmica)с разрешением до:
• 2048 точек для диаметра 40 мм;
• 5000 точек для диаметра 58 мм;
• 10000 точек для диаметра 90 мм.
или СТЕКЛО для более высоких разрешений и высоких частот
считывания до 300 кГц.
6.
Типы оптических энкодеровЭти изделия применяются во всех отраслях промышленности.
Можно выделить два основных семейства продуктов:
инкрементальные энкодеры, разработаны для определения
положения двигающейся части и мониторинга ее движения путем
приращения или уменьшения импульсов, которые они
вырабатывают;
абсолютные энкодеры, которые показывают точное
положение после одного или нескольких оборотов.
Эти два семейства включают в себя:
-абсолютные многооборотные энкодеры;
-тахо-энкодеры, которые дают информацию по скорости;
-тахометры, которые обрабатывают данные для предоставления
информации по скорости.
Во всех этих устройствах применяются одинаковые технологии.
Они отличаются друг от друга количеством окошек в диске и
способом их кодирования или обработки оптического сигнала.
7.
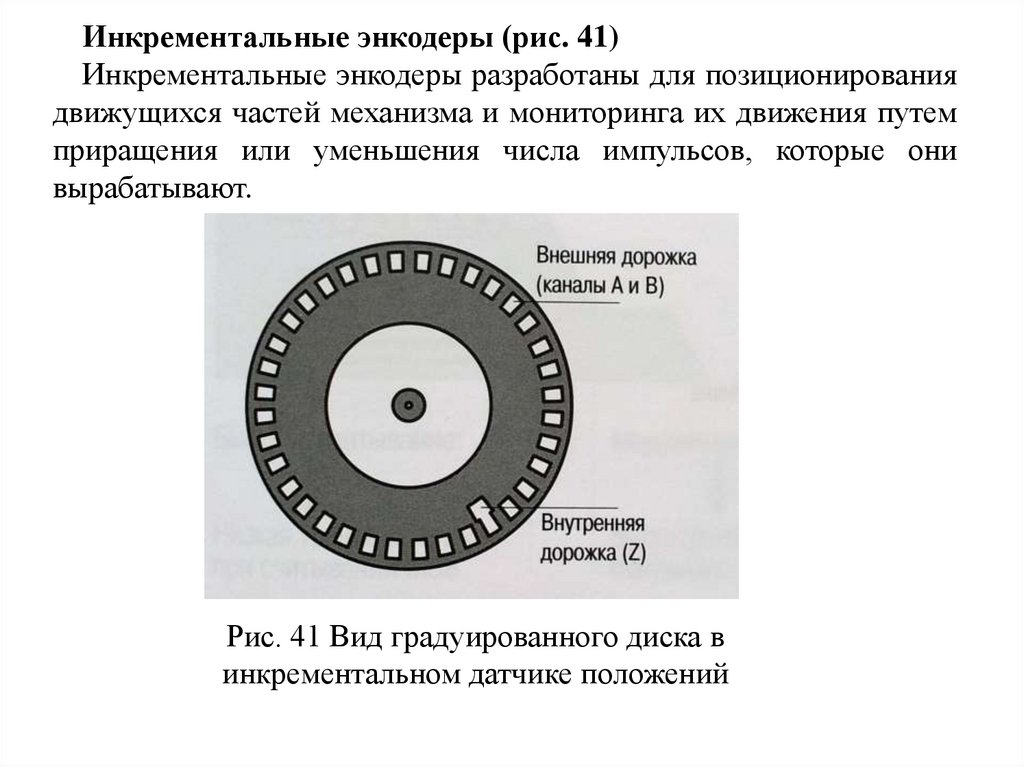
Инкрементальные энкодеры (рис. 41)Инкрементальные энкодеры разработаны для позиционирования
движущихся частей механизма и мониторинга их движения путем
приращения или уменьшения числа импульсов, которые они
вырабатывают.
Рис. 41 Вид градуированного диска в
инкрементальном датчике положений
8.
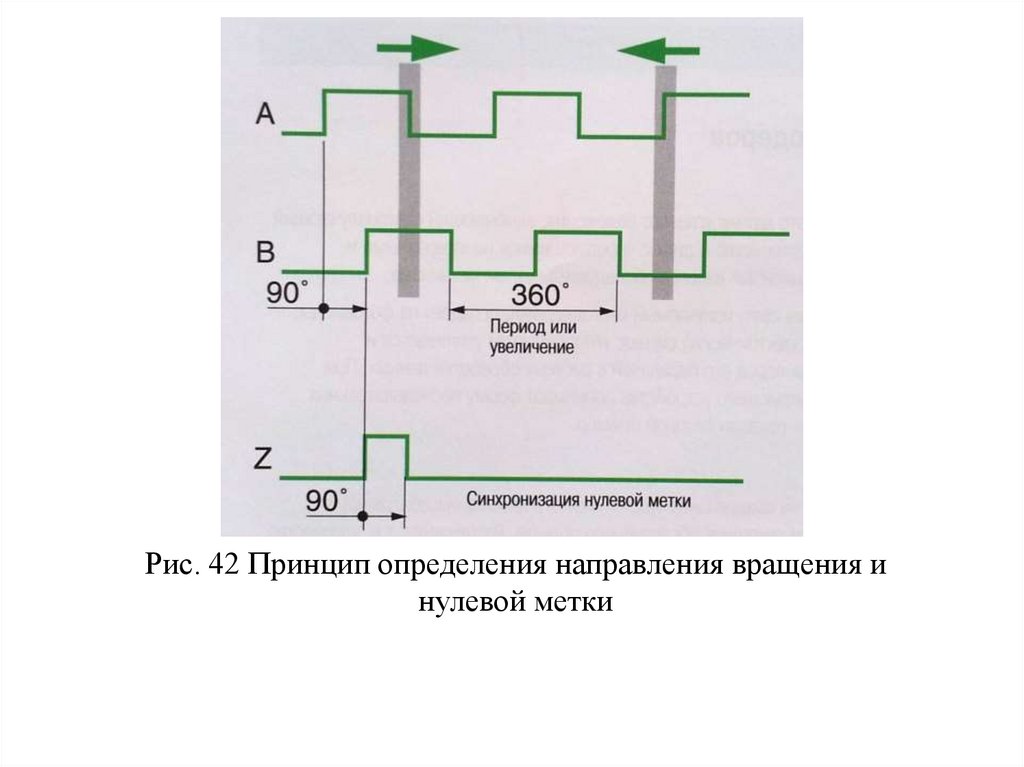
Диск инкрементального энкодера имеет два типа дорожек:-внешняя дорожка (каналы А и В), разделенная на «n»
чередующихся непрозрачных и прозрачных промежутков с
равными углами, «n» — разрешение количества периодов. Два
смещенных относительно друг друга фотодиода за этими
дорожками вырабатывают прямоугольные сигналы А и В каждый
раз, когда луч света проходит прозрачную зону. Фазовый сдвиг 90°
градусов (1/4 периода), между сигналами А и В, определяет
направление вращения (рис. 42). При вращении в одном
направлении В равно 1, когда А меняется с 0 до 1, при вращении в
противоположном направлении В равно 0 при изменении А с 0 до
1;
-внутренняя дорожка (Z) с единственным прозрачным окошком.
Сигнал Z, называемый нулевой меткой, с периодом 90° градусов,
синхронизируется с сигналами А и В. Он определяет исходное
положение и используется для повторной инициализации с
каждым поворотом.
9.
Рис. 42 Принцип определения направления вращения инулевой метки
10.
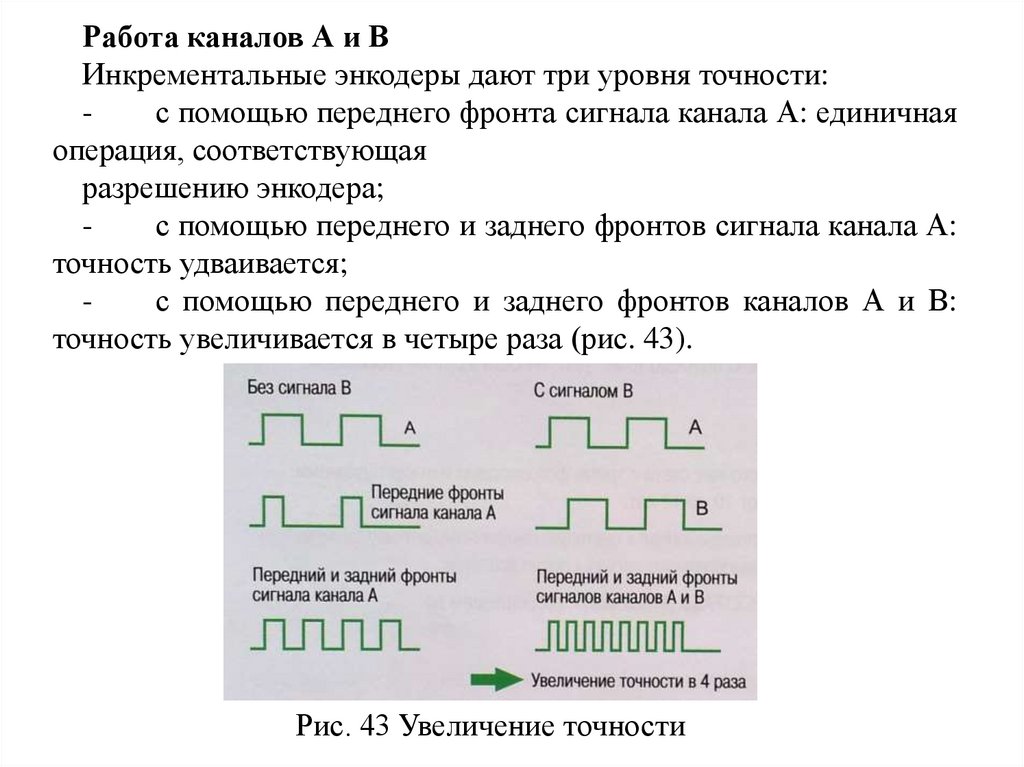
Работа каналов А и ВИнкрементальные энкодеры дают три уровня точности:
с помощью переднего фронта сигнала канала А: единичная
операция, соответствующая
разрешению энкодера;
с помощью переднего и заднего фронтов сигнала канала А:
точность удваивается;
с помощью переднего и заднего фронтов каналов А и В:
точность увеличивается в четыре раза (рис. 43).
Рис. 43 Увеличение точности
11.
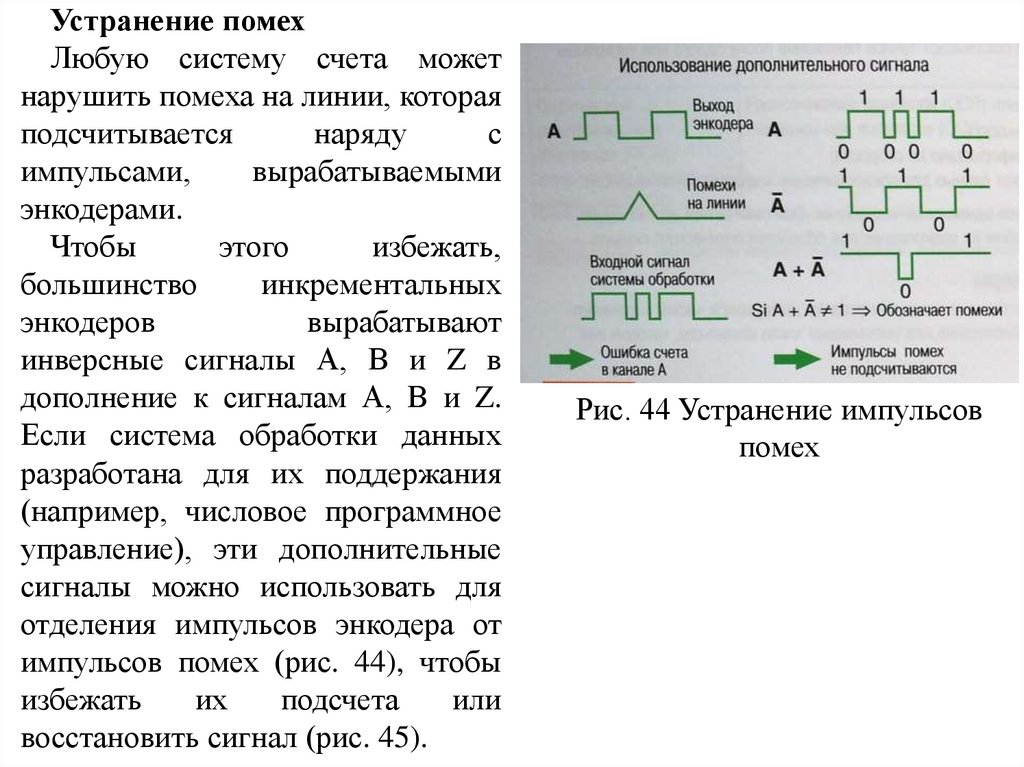
Устранение помехЛюбую систему счета может
нарушить помеха на линии, которая
подсчитывается
наряду
с
импульсами,
вырабатываемыми
энкодерами.
Чтобы
этого
избежать,
большинство
инкрементальных
энкодеров
вырабатывают
инверсные сигналы А, В и Z в
дополнение к сигналам А, В и Z.
Если система обработки данных
разработана для их поддержания
(например, числовое программное
управление), эти дополнительные
сигналы можно использовать для
отделения импульсов энкодера от
импульсов помех (рис. 44), чтобы
избежать
их
подсчета
или
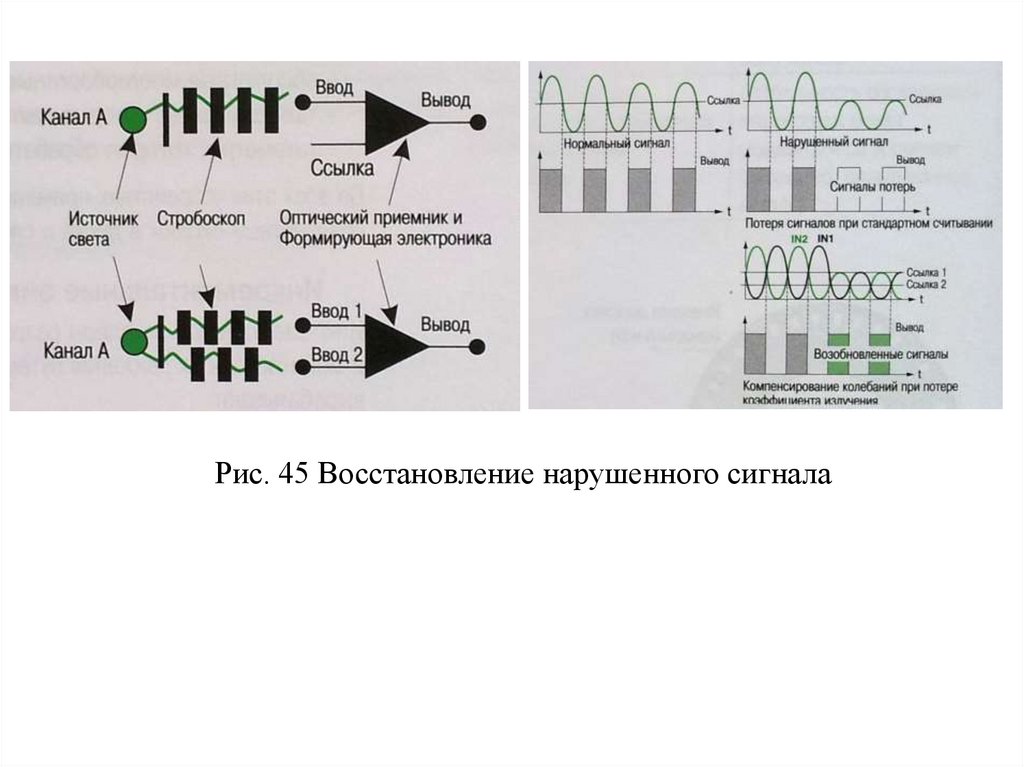
восстановить сигнал (рис. 45).
Рис. 44 Устранение импульсов
помех
12.
Рис. 45 Восстановление нарушенного сигнала13.
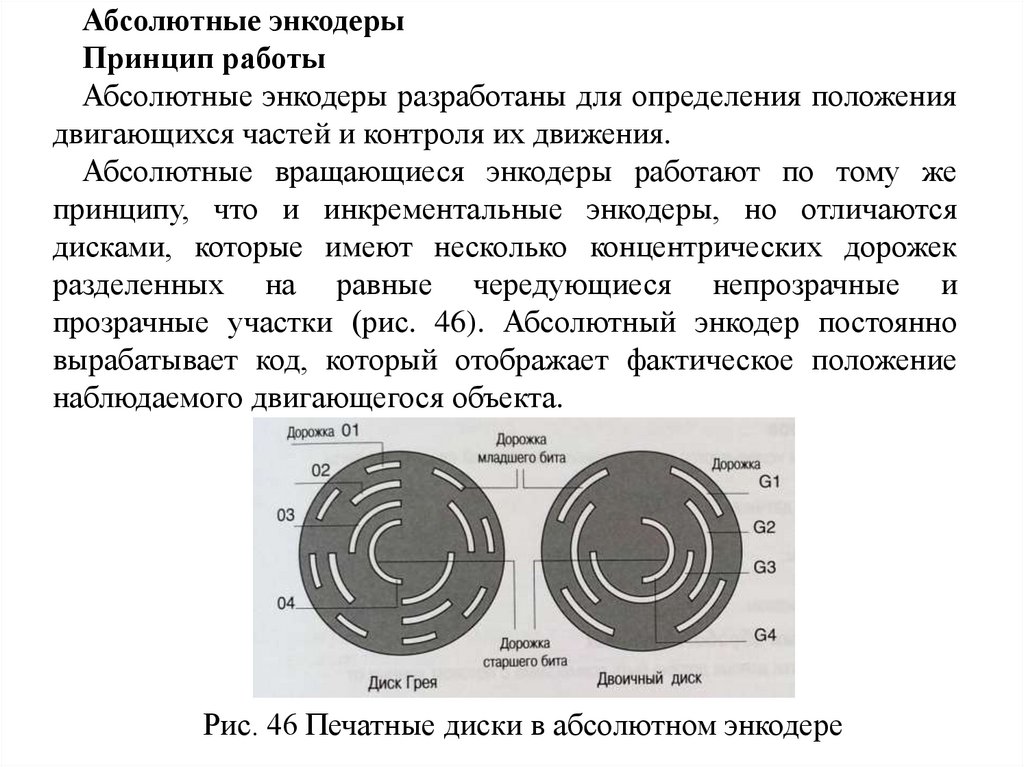
Абсолютные энкодерыПринцип работы
Абсолютные энкодеры разработаны для определения положения
двигающихся частей и контроля их движения.
Абсолютные вращающиеся энкодеры работают по тому же
принципу, что и инкрементальные энкодеры, но отличаются
дисками, которые имеют несколько концентрических дорожек
разделенных на равные чередующиеся непрозрачные и
прозрачные участки (рис. 46). Абсолютный энкодер постоянно
вырабатывает код, который отображает фактическое положение
наблюдаемого двигающегося объекта.
Рис. 46 Печатные диски в абсолютном энкодере
14.
Первая внутренняя дорожка наполовину прозрачная инаполовину непрозрачная. Она считывается чтобы определить
положение объекта с точностью до половины оборота (MSB:
старший бит).
Следующие дорожки, от центра до края диска, разделены на
чередующиеся непрозрачные и прозрачные четверти. Считывание
второй дорожки наряду с предыдущей (первой) устанавливает, в
какой четверти (1/4 или 1/22) оборота расположен объект.
Следующие дорожки последовательно определяют, в какой
восьмой (1/8 или 1/23), шестнадцатой (1/16) и т.д. части оборота он
расположен.
Внешняя дорожка соответствует младшему биту (LSB: младший
бит).
Количество параллельных выходных сигналов такое же, что и
количество битов или дорожек на диске. Отображение движения
требует количества пар диод/фототранзистор, равное числу
вырабатываемых битов или дорожек диска. Комбинация всех
сигналов на заданном движении дает положение двигающейся
части.
15.
Абсолютные датчики положения вырабатывают цифровой код,отображающий физическое положение диска, где каждый
отдельный код соответствует конкретному положению. Код,
выработанный вращающимися абсолютными энкодерами, либо
обычный двоичный код либо двоичный циклический, также
называемый кодом Грея (рис. 47).
Рис. 47 Сигнал, выработанный в коде Грея
вращающимся абсолютным энкодером
16.
Преимущества абсолютных датчиков положенияАбсолютные датчики положения имеют два основных
преимущества по сравнению с инкрементальными энкодерами:
-они устойчивы к сбоям в питании благодаря тому, что при
запуске или при восстановлении питания после сбоя абсолютный
энкодер вырабатывает данные о фактическом угловом положении
подвижной части механизма, которые могут быть немедленно
использованы в системе обработки данных. Инкрементальные
энкодеры
необходимо
вывести
в
ноль
перед
тем,
как сигналы можно будет фактически использовать;
-они не восприимчивы к помехам в линии. Помехи могут
повлиять на код, вырабатываемый абсолютным энкодером, но он
автоматически возвращается к нормальному, как только помехи
прекращаются. При использовании инкрементального энкодера
помехи компенсируются, если используются инверсные сигналы.
17.
Использование сигналовДля каждого углового положения вала, диск выдает код, который
может быть двоичным кодом или кодом Грея:
простой двоичный код. Используется для выполнения
четырех арифметических операций с числами, таким образом,
система обработки данных (ПЛК) непосредственно может
использовать их для вычислений.
При переходе из одного положения в соседнее несколько бит
могут одновременно изменить свое состояние.
Чтобы избежать этого, абсолютные датчики положения
вырабатывают запрещающий сигнал, который блокирует
выходные сигналы на время каждого изменения статуса;
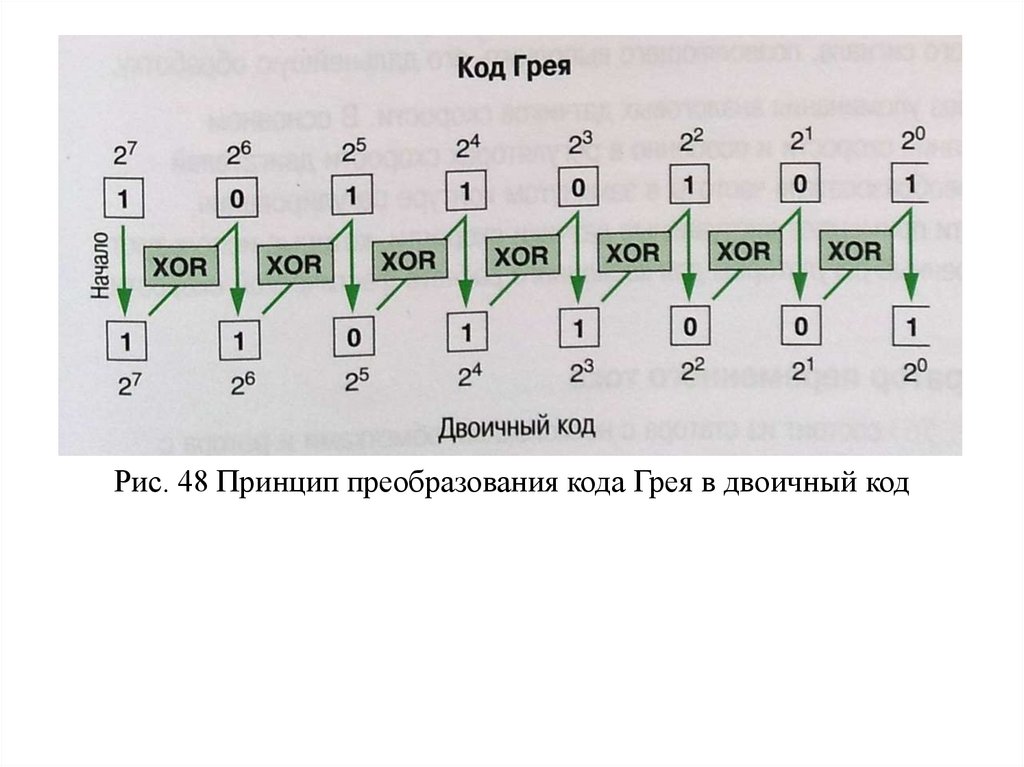
код Грея, где только один бит меняет состояние при
переходе между двумя соседними положениями диска, также
позволяет избежать этой неточности. Но чтобы ПЛК его
использовал, код Грея, он должен быть сначала преобразован в
двоичный код (рис. 48).
18.
Рис. 48 Принцип преобразования кода Грея в двоичный код19.
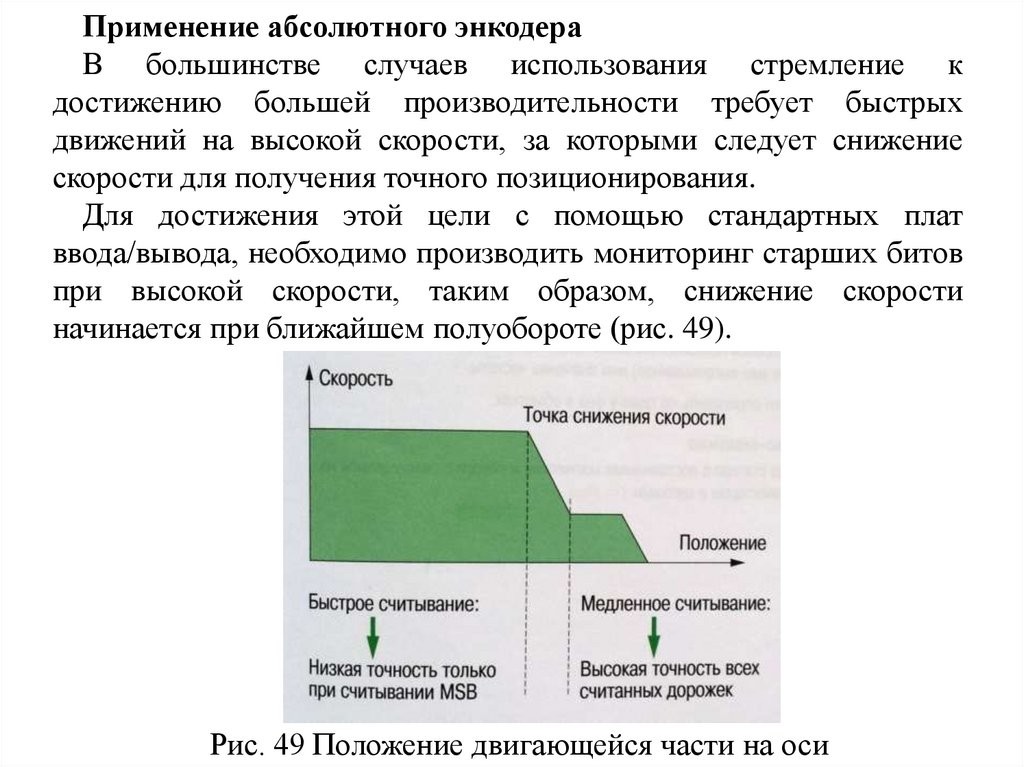
Применение абсолютного энкодераВ большинстве случаев использования стремление к
достижению большей производительности требует быстрых
движений на высокой скорости, за которыми следует снижение
скорости для получения точного позиционирования.
Для достижения этой цели с помощью стандартных плат
ввода/вывода, необходимо производить мониторинг старших битов
при высокой скорости, таким образом, снижение скорости
начинается при ближайшем полуобороте (рис. 49).
Рис. 49 Положение двигающейся части на оси
20.
Разновидности энкодеровВ настоящее время разработаны и используются для различных
применений следующие типы энкодеров:
-многооборотные абсолютные датчики;
-тахо-энкодеры и тахометры;
-энкодеры, со сплошным валом;
-энкодеры, пустотелым валом;
-энкодеры, со связью по протоколам.
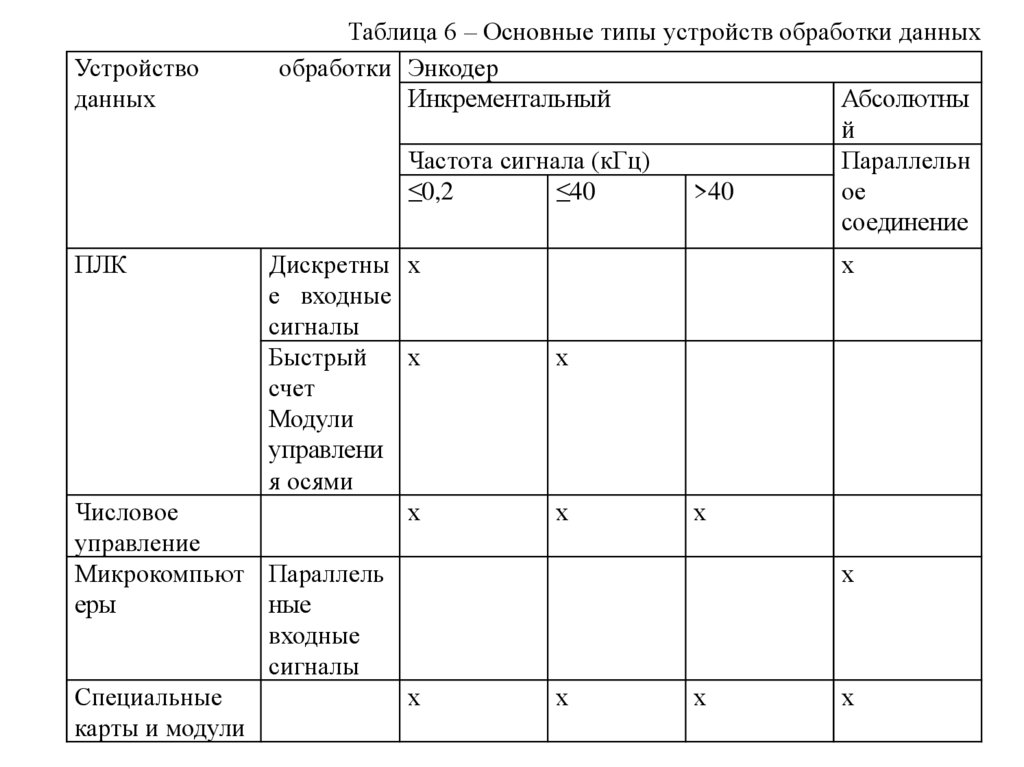
Энкодеры с устройствами обработки данных
Входная схема устройства обработки данных должна быть
совместима с потоком данных от энкодеров (табл. 6).
21.
Устройстводанных
ПЛК
Таблица 6 – Основные типы устройств обработки данных
обработки Энкодер
Инкрементальный
Абсолютны
й
Частота сигнала (кГц)
Параллельн
≤0,2
≤40
>40
ое
соединение
Дискретны х
е входные
сигналы
Быстрый
х
счет
Модули
управлени
я осями
х
Числовое
управление
Микрокомпьют Параллель
еры
ные
входные
сигналы
Специальные
х
карты и модули
х
х
х
х
х
х
х
х