









 Электроника
ЭлектроникаПохожие презентации:










Проектирование мехатронных и робототехнических систем
1.
ВЛАДИМИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТимени Александра Григорьевича и Николая Григорьевича Столетовых
Дисциплина:
ПРОЕКТИРОВАНИЕ МЕХАТРОННЫХ
И РОБОТОТЕХНИЧЕСКИХ СИСТЕМ
кандидат технических наук, доцент
Ифанов Андрей Владимирович
2.
Занятие 5Проектирование мехатронных
модулей движения
3.
Проектированиесоответствии
с
мехатронных
техническим
модулей
заданием,
(ММ)
производят
являющимся
в
основным
исходным документом, на основании которого проводят создание
мехатронных модулей и приемку их заказчиком.
При проектировании необходимо руководствоваться принципами
системности,
развития (открытости),
совместимости,
стандартизации (унификации),
эффективности.
4.
Принцип системности заключается в том, что при декомпозиции должныбыть установлены такие связи между структурными элементами
системы, которые обеспечивают цельность ММ и его взаимодействие с
другими системами.
Принцип развития (открытости) заключается в том, что исходя из
перспектив развития, ММ должен создаваться с учетом возможности
пополнения и обновления функций и состава системы без нарушения ее
функционирования.
Принцип совместимости заключается в том, что при создании ММ
должны быть реализованы информационные интерфейсы, благодаря
которым он может взаимодействовать с другими системами в
соответствии с установленными правилами.
5.
Принцип стандартизации (унификации) заключается в том, что присоздании систем должны быть рационально применены типовые,
унифицированные и стандартизованные элементы, проектные
решения, пакеты прикладных программ, комплексы, компоненты.
Принцип эффективности заключается в достижении рационального
соотношения между затратами на создание ММ и целевыми
эффектами, включая конечные результаты, получаемые в
результате его внедрения.
Проект представляет собой техническую документацию,
состоящую из текстовых и графических материалов, в которых
отражены принципиальные технические решения, затраты и
экономическая эффективность.
6.
Текстовые материалы включают в себя:общую пояснительную записку, содержащую исходные данные для
проектирования, краткую характеристику объекта, для которого
проектируется ММ, обоснование принятых проектных решений в части
регулирования, управления и сигнализации, обоснование применения
несерийной аппаратуры, и указания соответствия проекта действующим
в стране нормам и правилам проектирования, в том числе нормам по
взрыво- и пожаробезопасности;
заказные спецификации, необходимые для размещения заказов на
оборудование, и ведомости на приборы, арматуру, кабельные и другие
изделия массового и серийного производства;
сводный сметный расчет стоимости приобретения и монтажа
технических средств;
технико-экономическую часть, включающую обоснование основных
технико-экономических показателей и расчеты эффективности
использованных в проекте новейших достижений науки и техники.
7.
Графические материалы включают в себя:схемы автоматизации технологических процессов, для которых
выполняется проект мехатронных модулей;
принципиальные схемы информационной увязки подсистем,
структурные схемы комплекса технических средств (для сложных
систем);
принципиальные электрические схемы, организация связи (в
необходимых случаях).
Проектирование мехатронных модулей выполняется в соответствии с
требованиями Единой системы конструкторской документации (ЕСКД).
8.
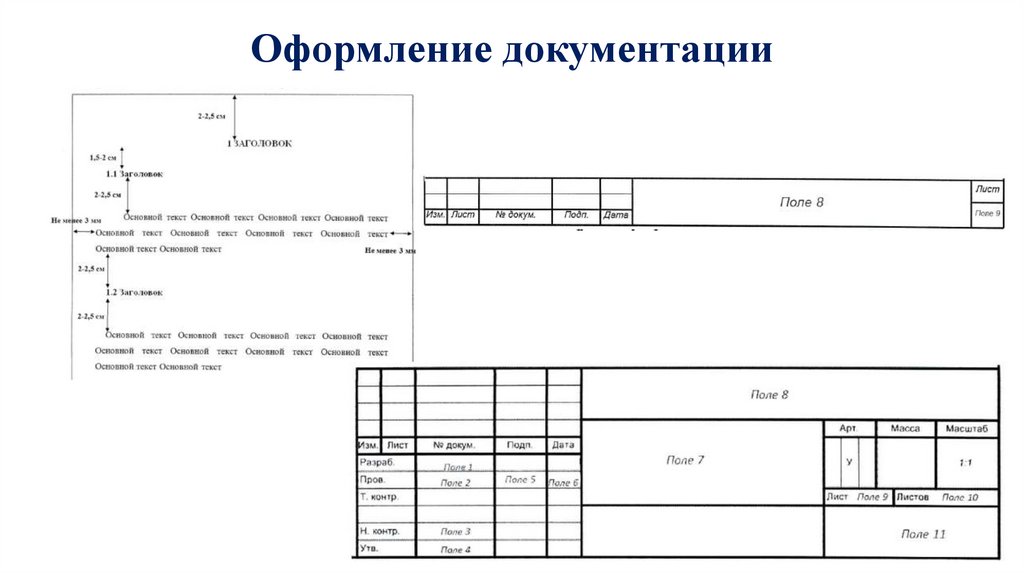
Оформление документации9.
Анализ мехатронного модуля10.
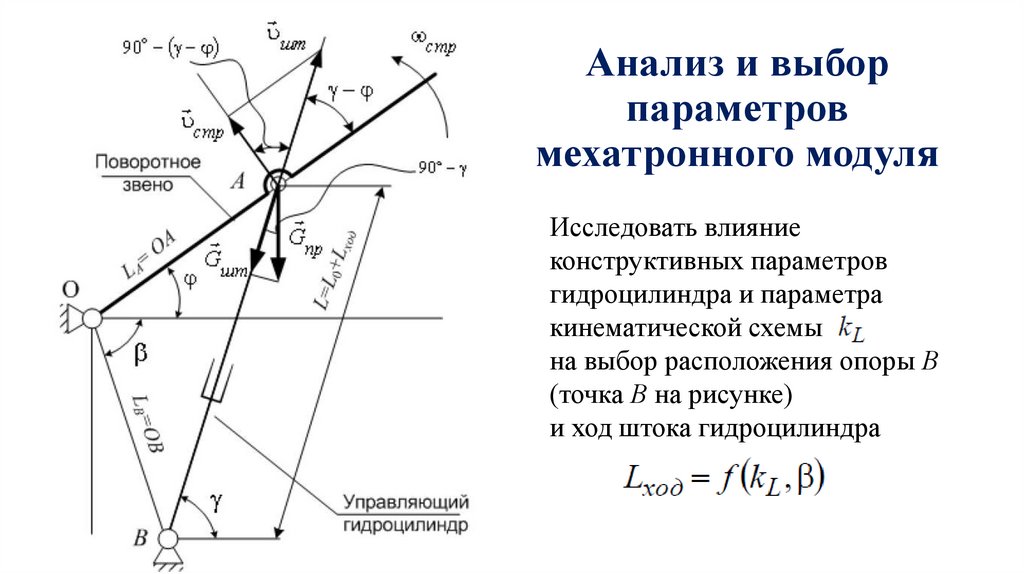
Анализ и выборпараметров
мехатронного модуля
Исследовать влияние
конструктивных параметров
гидроцилиндра и параметра
кинематической схемы
на выбор расположения опоры В
(точка В на рисунке)
и ход штока гидроцилиндра
11.
Определим зависимость управляющегопараметра L, являющегося функцией
перемещения штока гидроцилиндра, от
угла φ поворотного звена модуля.
Применив теорему косинусов для
треугольника ОАВ, получим L
Выразим величину LB через расстояние
LA между двумя креплениями
поворотного звена.
kL - конструктивный параметр кинематической схемы, определяющий
соотношение сторон LA и LB и который может принимать значения как
больше 1, так и меньше 1
12.
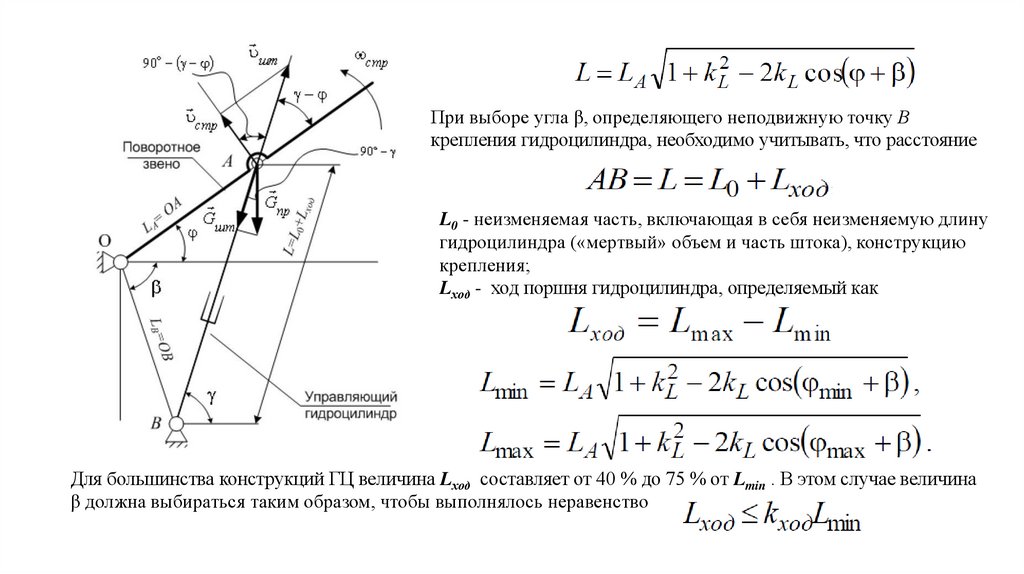
При выборе угла β, определяющего неподвижную точку Вкрепления гидроцилиндра, необходимо учитывать, что расстояние
L0 - неизменяемая часть, включающая в себя неизменяемую длину
гидроцилиндра («мертвый» объем и часть штока), конструкцию
крепления;
Lход - ход поршня гидроцилиндра, определяемый как
Для большинства конструкций ГЦ величина Lход составляет от 40 % до 75 % от Lmin . В этом случае величина
β должна выбираться таким образом, чтобы выполнялось неравенство
13.
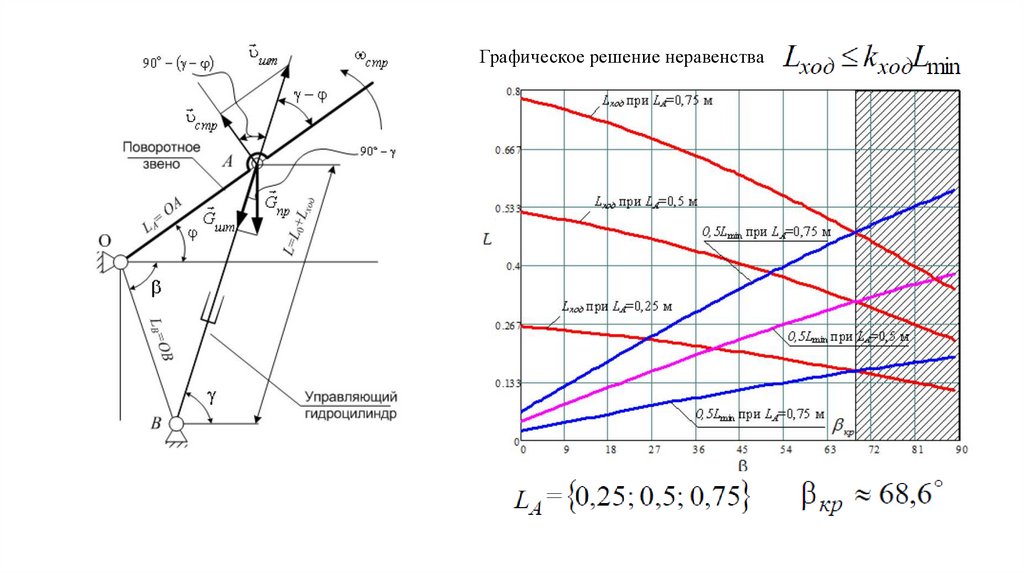
Графическое решение неравенства14.
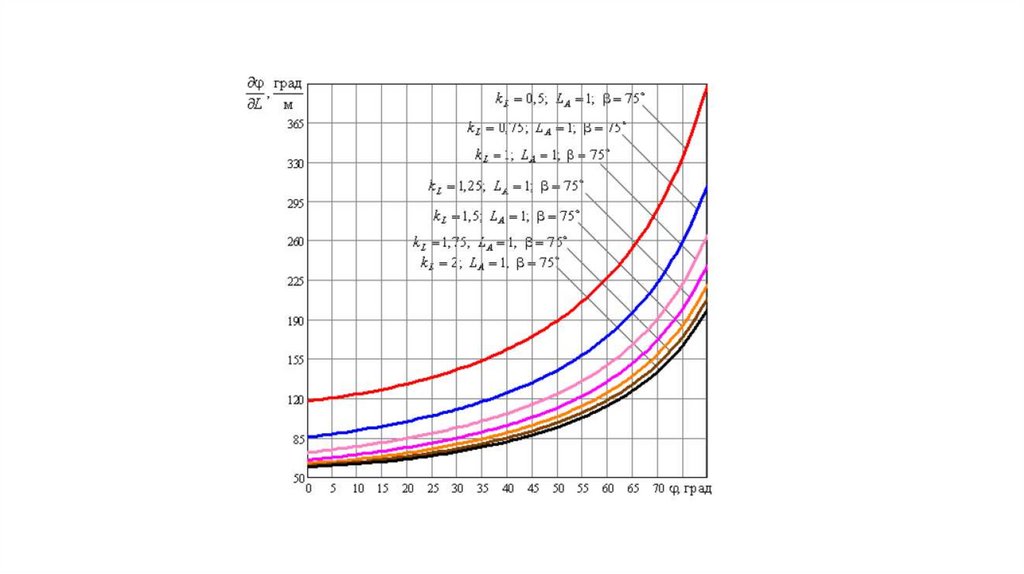
Анализ кинематической погрешностиРешим прямую задачу кинематики, т.е. определим функцию
Из уравнения
Найдем
Разложим ее в ряд Тейлора по переменной L: где ∆L можно
расценивать как погрешность по перемещению
15.
16.
17.
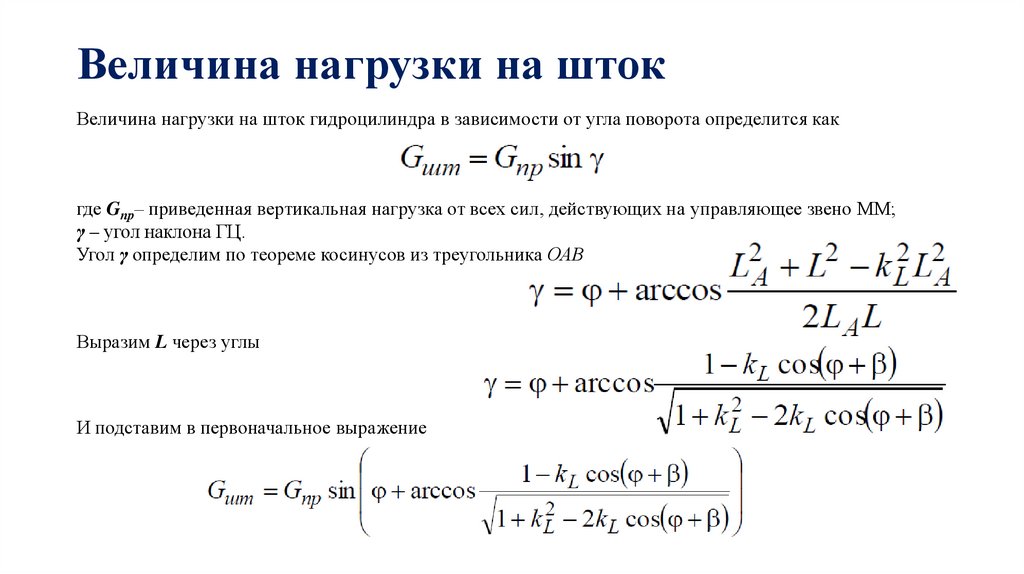
Величина нагрузки на штокВеличина нагрузки на шток гидроцилиндра в зависимости от угла поворота определится как
где Gпр– приведенная вертикальная нагрузка от всех сил, действующих на управляющее звено ММ;
γ – угол наклона ГЦ.
Угол γ определим по теореме косинусов из треугольника ОАВ
Выразим L через углы
И подставим в первоначальное выражение