






























 Механика
МеханикаПохожие презентации:





")




Типовые устройства для обеспечения траектории простых исполнительных движений
1. Типовые устройства для обеспечения траектории простых исполнительных движений.
Вращательное движение.Внутренняя связь – кинематическая пара «шпиндель - подшипники».
Основные требования к опорам шпинделя:
1. Точность вращения.
2. Возможность компенсации износа.
3. Большая грузоподъемность (жесткость).
4. Малые потери на трение.
2. Типовые устройства для обеспечения траектории простых исполнительных движений.
Вращательное движение.Внутренняя связь – кинематическая пара «шпиндель - подшипники».
Основные требования к опорам шпинделя:
1. Точность вращения.
2. Возможность компенсации износа.
3. Большая грузоподъемность (жесткость).
4. Малые потери на трение.
В качестве опор шпинделей используются как подшипники качения,
так и подшипники скольжения. Основным является первый тип опор
(90 % всех станков), однако их точность ограничена 1…2 мкм.
3. Типовые устройства для обеспечения траектории простых исполнительных движений.
Вращательное движение.Подшипники качения для шпинделей являются
специальными повышенных классов точности:
1.Повышенный (П).
2.Высокий (В),
3.Особовысокий (А).
4.Сверхвысокий (С).
4.
5.
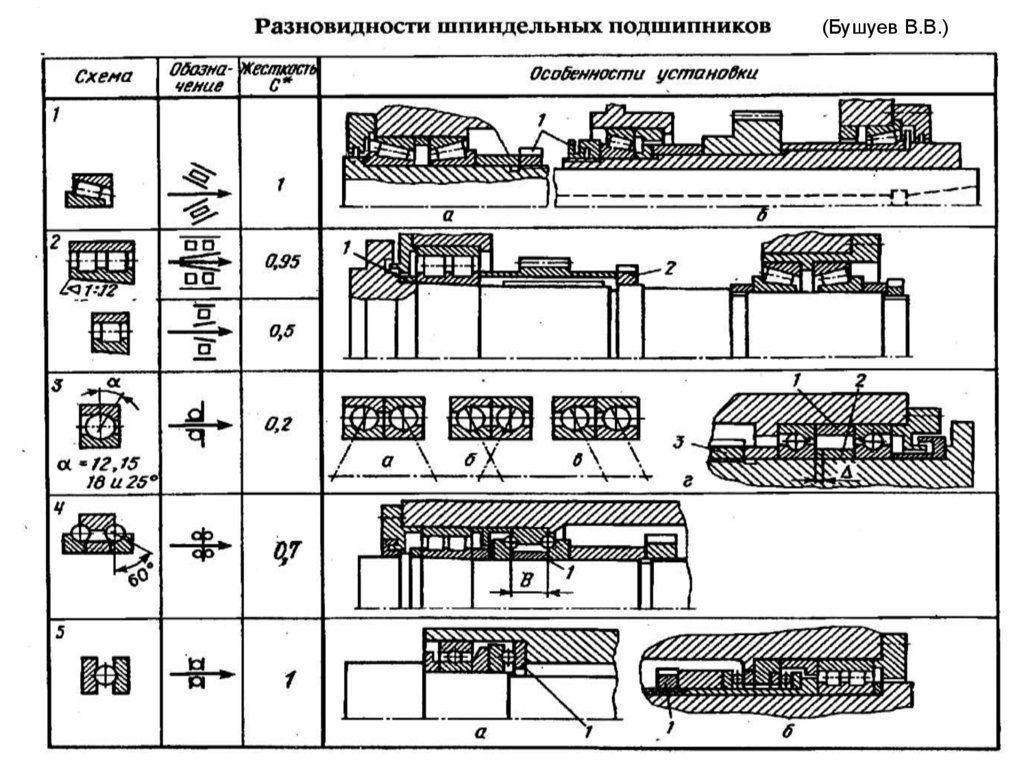
(Бушуев В.В.)6. Типовые конструктивные схемы расположения подшипников качения
(Бушуев В.В., Пуш В.Э.)7. Подшипники скольжения
Подшипники скольжения:1. Обеспечивают большую точность вращения шпинделя.
2. Имеют высокую виброустойчивость.
3. Обладают высокими демпфирующими свойствам.
Наиболее часто используются гидростатические и гидродинамические
опоры (опоры жидкостного трения)
8. Гидростатические осевые и радиальные опоры
(Пуш В.Э.)9. Типовые устройства для обеспечения траектории простых исполнительных движений.
Поступательное движение.Внутренняя связь – кинематическая пара «ползун - направляющие».
Направляющие так же бывают двух типов – качения и скольжения.
Наибольшее распространение получили направляющие скольжения со
смешанным трением.
Основные достоинства:
1. Простота конструкции.
2. Низкая стоимость изготовления.
3. Высокая контактная жесткость и демпфирующая способность.
Для исключения возможности отклонения исполнительных органов
от заданной траектории направляющие делают замкнутыми.
10. Направляющие скольжения
11. Направляющие скольжения
12. Направляющие скольжения
Недостатки:1. Низкая износостойкость в связи с преобладанием полусухого трения
(f =0,1…0,3).
2. Имеют склонность к скачкообразному движению при малых
скоростях, т.к. коэффициент трения покоя существенно отличается от
коэффициента трения при движении
13. Направляющие скольжения с гидроразгрузкой
Достоинства:1. Часть нагрузки воспринимается давлением
масла (f =0,05…0,08).
2. Повышается долговечность, уменьшается
скачкообразность движения.
Недостатки:
1. Механическое трение полностью не
устраняется
2. Направляющие не замкнуты.
14. Направляющие скольжения гидродинамические и гидростатические
h порядка 0,02 мм, коэффициент трения f = 0,000815. Направляющие качения
Достоинства:1. Плавность движения.
2. Высокая точность и жесткость
3. Высокий КПД (f = 0,005…0,05)
4. Большая долговечность
16. Направляющие качения
17. Типовые устройства для настройки скорости.
Регулирование скорости исполнительных движений можетосуществляться:
-
механически,
-
электрически,
-
гидравлически
-
комбинированно.
- Основной характеристикой этих устройств является диапазон
регулирования скорости – отношение максимального значения
скорости к минимальному.
По виду регулирования скорости приводы могут быть
-
ступенчатые;
-
бесступенчатые (плавные).
18. Ступенчатое регулирование скорости.
Достоинства:1. Жесткость характеристики.
2. Высокий КПД.
3. Большая надежность в работе.
4. Простота эксплуатации.
19. Ступенчатое регулирование скорости.
Точение цилиндрической поверхности диаметром d, соскоростью резания V=30 м/с
d, мм
n, об/мин
5
1910
15
637
25
382
35
273
45
212
55
174
65
147
20. Ступенчатое регулирование скорости.
Числа оборотов при ступенчатом регулировании скоростиобразуют геометрическую прогрессию со знаменателем ряда φ:
n1 nmin
n2 n1
n3 n2 n1 2
n4 n3 n1 3
Знаменатели ряда φ и значения чисел геометрических рядов
устанавливаются по нормали Н11-1 и ГОСТ 8032-84 .
φ = 1,06 – 1,12 – 1,26 – 1,41 – 1,58 -1,78 – 2 (Н11-1)
φ = 1,06 – 1,12 – 1,25 – 1,6 (ГОСТ 8032-84)
1 ,06 12 2 40 10
1 ,12 1 ,062 6 2 20 10
1 ,26 1 ,064 3 2 10 10
21. Ступенчатое регулирование скорости.
С использованием многоскоростных электродвигателейn
60 f
p
3000 / 1500 / 1000 / 750
N2
3
0 ,866
N1
2
D 2...4; Z 2...4
Достоинства:
Существенно упрощает конструкцию коробок скоростей
Недостатки:
1. Увеличение габарита двигателя
2. Падение мощности на валу двигателя
22. Ступенчатое регулирование скорости.
Ступенчатые шкивыD1 D5 D2 D6 D3 D7 const
D 4...6; Z 2...5
Достоинства:
1.
Равномерная безвибрационная работа на больших скоростях
2. Компактность.
Недостатки:
1. Непостоянство передаваемой мощности
2. Длительность переналадки
23. Ступенчатое регулирование скорости.
Парносменные колеса (гитары)Однопарные
a
b
a b const
0 ,25 i 2 ,5 для главного привода
0 ,2 i 2 ,8 для привода подач
D 4...10; Z 1...12
Достоинства:
Простота конструкции
Жесткость крепления
Недостатки:
1. Малый диапазон регулирования
2. Длительность переналадки
24. Ступенчатое регулирование скорости.
Парносменные колеса (гитары)a
Двухпарные
b
a b var c d var
c
D 100...160; Z
d
Достоинства:
1. Компактность привода
2. Большой диапазон регулирования
3. Возможность компенсации непараллельности соединяемых
валов
Недостатки:
1. Малая жесткость
2. Длительность переналадки
25. Ступенчатое регулирование скорости.
Двухпарные парносменные колеса (гитары)26. Ступенчатое регулирование скорости.
Подвижные блоки колесZ1 Z 2 Z 3 Z4 Z5 Z6 const
D 4...8; Z 2...4
Достоинства:
1. Приспособлены к частому переключению передач
2. Передача больших крутящих моментов
Недостатки:
1. Невозможность применения косозубых и шевронных колес
2. Невозможность переключения на ходу
3. Большие осевые размеры
27. Ступенчатое регулирование скорости.
С использованием кулачковых муфтD 4...8; Z 2
Достоинства:
1. Малые осевые перемещения
2. Возможность передачи косозубыми и шевронными колесами
3. Малые усилия при переключении
Недостатки:
1. Холостое вращение колес создает дополнительные потери на трение
2. Невозможность переключения на ходу
3.
Необходимость доворота валов при переключении для совпадения
зубьев муфты
28. Ступенчатое регулирование скорости.
С использованием фрикционных муфтZ1 Z 2 Z 3 Z4 const
D 4...8; Z 2
Достоинства:
1. Возможность переключения на ходу
2. Плавность и безударность работы при переключении
Недостатки:
1. Ограниченная величина передаваемых крутящих моментов
2. Большие радиальные и осевые габариты
3. Более низкий КПД
29. Ступенчатое регулирование скорости.
Передачи со ступенью возврата (переборы)D 6...16; Z 2
30. Ступенчатое регулирование скорости.
Механизм НортонаДостоинства:
1. Малые осевые габариты
2. Меньшее число зубчатых колес
D 2...3; Z 5...12
Недостатки:
1. Малая жесткость и точность включаемых колес
2. Длительность переключения
31. Ступенчатое регулирование скорости.
Механизм меандр с накидной шестернейD 8...16; Z 4...8
Достоинства:
1. Малые осевые габариты
2. Большой диапазон регулирования
Недостатки:
1. Малая жесткость
2. Повышенный износ зубчатых колес
32. Ступенчатое регулирование скорости.
Механизм с вытяжной шпонкойДостоинства:
1. Малые осевые габариты
2. Однорычажное управление
D 4...8; Z 3...5
Недостатки:
1. Малая жесткость шпоночного валика
2. Повышенный износ зубчатых колес