 Промышленность
ПромышленностьПохожие презентации:










Манипуляционные робототехнические системы для работы на глубине
1.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯРОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение высшего образования
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО
ПРИБОРОСТРОЕНИЯ»
Кафедра №32 Электромеханики и робототехники
ТЕМА ДОКЛАДА
МАНИПУЛЯЦИОННЫЕ РОБОТОТЕХНИЧЕСКИЕ СИСТЕМЫ
ДЛЯ РАБОТЫ НА ГЛУБИНЕ
Научный руководитель:
доцент, канд. тех. наук
Сержантова Майя Вячеславовна
Докладчик:
Аспирант
Рудаков Роман Вадимович
Санкт-Петербург 2024 г.
2.
Цели и задачиЦель: Для нелинейного нестационарного объекта синтезировать адаптивный регулятор
с
эталонной
моделью
и
обобщенным
пропорционально-интегральным
законом
регулирования, работающим в скользящем режиме.
Задачи:
1.
2.
3.
4.
5.
2
3.
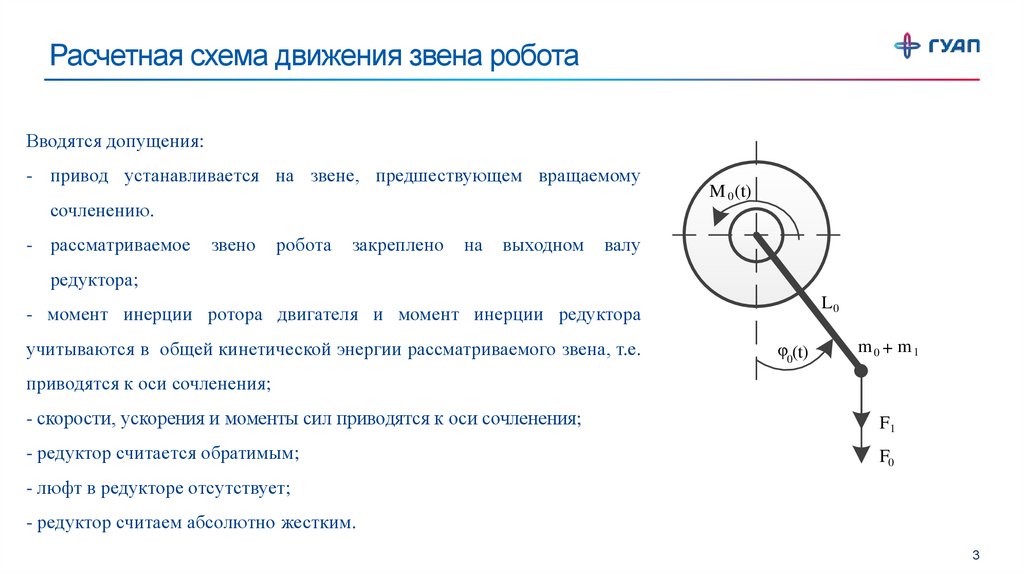
Расчетная схема движения звена роботаВводятся допущения:
- привод устанавливается на звене, предшествующем вращаемому
сочленению.
- рассматриваемое
звено
робота
закреплено
на
выходном
M 0 (t)
валу
редуктора;
L0
- момент инерции ротора двигателя и момент инерции редуктора
учитываются в общей кинетической энергии рассматриваемого звена, т.е.
φ0(t)
m0 + m1
приводятся к оси сочленения;
- скорости, ускорения и моменты сил приводятся к оси сочленения;
F1
- редуктор считается обратимым;
F0
- люфт в редукторе отсутствует;
- редуктор считаем абсолютно жестким.
3
4.
МОДЕЛЬ ДВИЖЕНИЯ ЗВЕНА РОБОТАВставить формулу
4
5.
ЛИАНЕРИЗАЦИЯ МОДЕЛИВставить информацию
5
6.
СИНТЕЗ БАЗОВОГО ЗАКОНА УПРАВЛЕНИЯВстамить информакцию
6
7.
СХЕМА БАЗОВОЙ СИСТЕМЫ УПРАВЛЕНИЯвставить информацию
7
8.
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯВставить графики
8
9.
АДАПАТИВНОЕ УПРАВЛЕНИЕ В УСЛОВИЯХНЕОПРЕДЕЛЕННОСТИ
Вставить инфомацию
9
10.
СХЕМА УПРАВЛЕНИЯВставить схему управления
10
11.
Результаты моделированиядобавить графики с расшифровокой три слайда
11
12.
Результаты моделированиядобавить графики с расшифровокой три слайда
12
13.
Результаты моделированиядобавить графики с расшифровокой три слайда
13
14.
ЗАКЛЮЧЕНИЕ (переделать, представлен пример)В данной работе были получены следующие результаты исследования:
1. Время цикла производства, использующие три манипулятора, существенно
меньше чем с одним роботом манипулятором на 181 с (почти 30%).
2. Коэффициент загрузки у производства, использующее один манипулятор, явно
выше