









")


























")





")






")



")
















 Промышленность
ПромышленностьПохожие презентации:









")
Системы комплексной механизации
1.
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ)
КАФЕДРА АВТОМАТИЗАЦИИ ПРОЦЕССОВ
ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
СИСТЕМЫ КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ
ИЛЛЮСТРАТИВНЫЙ МАТЕРИАЛ ПО КУРСУ ЛЕКЦИЙ
Составил к.т.н., доцент
САНКТ-ПЕТЕРБУРГ
2017
А.А. Пешехонов
2. ОСНОВНЫЕ ПРОИЗВОДСТВА ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
ПодотрасльПримеры производимых продуктов
Неорганическая
химия
Органическая химия
производство аммиака, содовые производства, серная
кислота
акрилонитрил, фенол, окись этилена, карбамид
Химия силикатов
Керамика, стекло, огнеупоры
Нефтехимия
бензол, этилен, стирол
Агрохимия
удобрения, пестициды (инсектициды, гербициды)
Полимеры
полиэтилен, бакелит, полиэстер
Эластомеры
резина, неопрен, полиуретаны
Взрывчатые вещества нитроглицерин, нитрат аммония, нитроцеллюлоза
Химфарм
лекарственные препараты, медикаменты
Парфюмерия
и косметика
Бытовая химия
кумарин, ванилин, камфара
29.11.2017
лаки и краски, моющие средства, клеи
2
3. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
Механизм — искусственно созданное устройство, предназначенноедля преобразования энергии, траекторий и характеристик
материалов.
Машина — механизмы, объединенные для выполнения общей
технологической операции.
ВИДЫ МАШИН В ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССАХ
1) Машины для преобразования энергии: электро-, гидро- и
пневмодвигатели, двигатели внутреннего сгорания,
2) Технологические машины для изменения свойств объектов
переработки: дробилки, мельницы, мешалки, прессы, обрабатывающие
станки и др.
3) Транспортные машины для перемещения материалов и изделий:
транспортеры, экскаваторы, автомобили, вагоны, пневмотранспорт.
4) Исполнительные элементы систем автоматического управления
(клапаны, вентили, заслонки, дозаторы и питатели).
5) Управляющие
машины:
гидравлические,
пневматические,
механические и комбинированные регуляторы, измерительные
преобразователи (!).
29.11.2017
3
4. НЕ СОВСЕМ ОЧЕВИДНЫЕ ВОЗМОЖНОСТИ МАШИН И МЕХАНИЗМОВ
Преобразование информацииЛюбой физический процесс кроме изменения
физических переменных генерирует
информацию, Потребляемая при этом энергия
рассеивается, информация – нет.
Технологические машины и механизмы как
датчики систем контроля и управления
(сепараторы, вертикальные пневмоподъёмники,
дозаторы, фильтры, мельницы и др.)
Технологические аппараты с функциями
управляющих систем
(пневматические подъёмники, сушилки ПОЖС,
дозаторы жидкостей и сыпучих материалов)
29.11.2017
4
5.
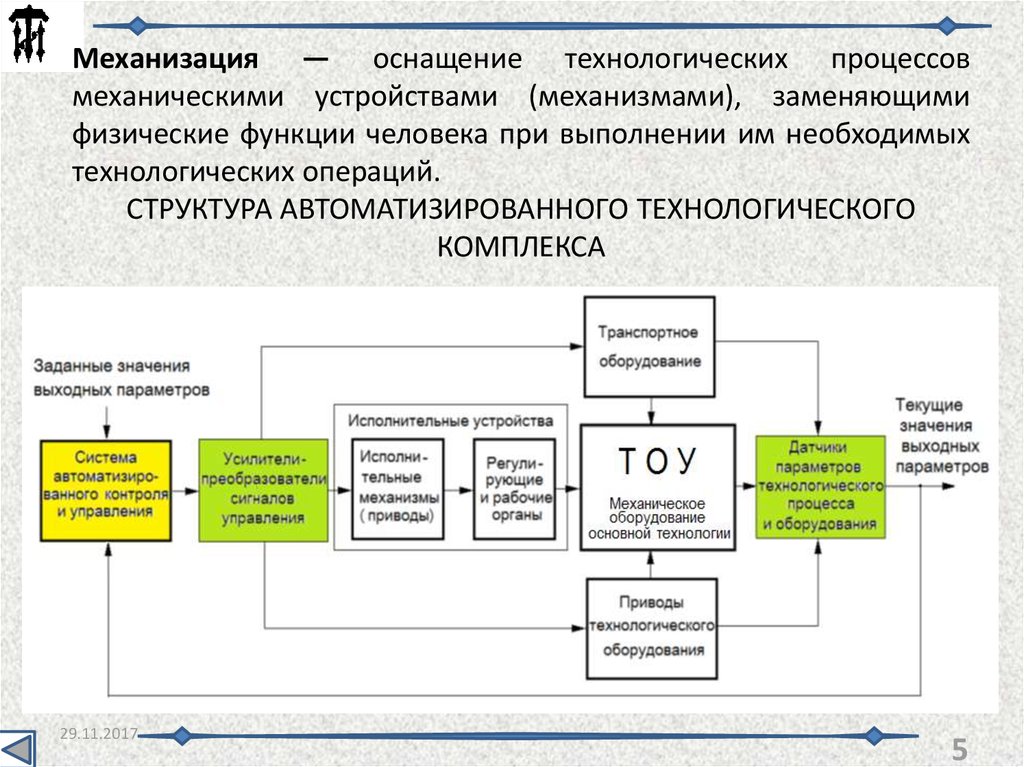
Механизация — оснащение технологических процессовмеханическими устройствами (механизмами), заменяющими
физические функции человека при выполнении им необходимых
технологических операций.
СТРУКТУРА АВТОМАТИЗИРОВАННОГО ТЕХНОЛОГИЧЕСКОГО
КОМПЛЕКСА
29.11.2017
5
6. МЕХАНИЧЕСКИЕ ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ И ОПЕРАЦИИ
29.11.20176
7.
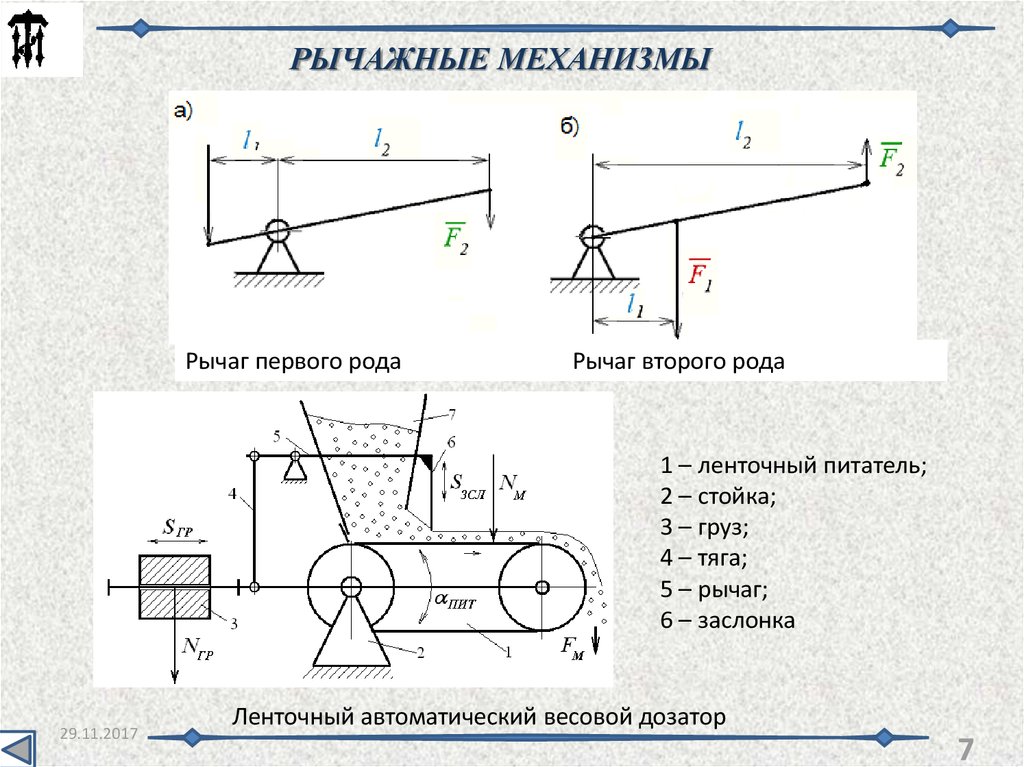
РЫЧАЖНЫЕ МЕХАНИЗМЫРычаг первого рода
Рычаг второго рода
1 – ленточный питатель;
2 – стойка;
3 – груз;
4 – тяга;
5 – рычаг;
6 – заслонка
29.11.2017
Ленточный автоматический весовой дозатор
7
8.
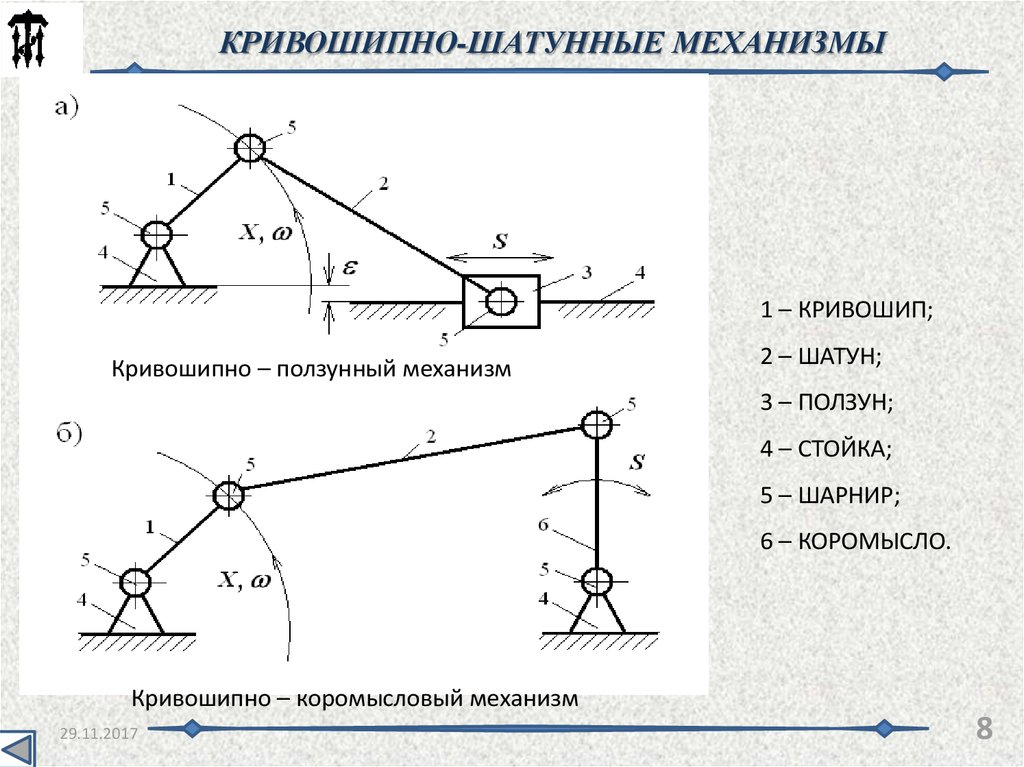
КРИВОШИПНО-ШАТУННЫЕ МЕХАНИЗМЫ1 – КРИВОШИП;
Кривошипно – ползунный механизм
2 – ШАТУН;
3 – ПОЛЗУН;
4 – СТОЙКА;
5 – ШАРНИР;
6 – КОРОМЫСЛО.
Кривошипно – коромысловый механизм
29.11.2017
8
9.
1 – КРИВОШИП (ведущее звено);2 – ПОЛЗУН (ПОРШЕНЬ) – ведомое
звено)
3 - ШАТУН
Коленно – рычажный механизм сжатия
А) С ПОСТУПАТЕЛЬНЫМ
ДВИЖЕНИЕМ
ВЕДОМОГО ЗВЕНА;
Б) С ПОВОРОТОМ
ВЕДОМОГО ЗВЕНА
1 – СТОЙКА;
2 – КУЛАЧОК;
3 – РОЛИК;
4 – ТОЛКАТЕЛЬ;
5 – ШАТУН.
29.11.2017
Кулачковые механизмы
9
10.
1 – стойка;2 – клин;
3 - стержень
Клиновой механизм
1 – приводной
(ведущий) диск
2 – ведомый диск
Механический вариатор
29.11.2017
10
11.
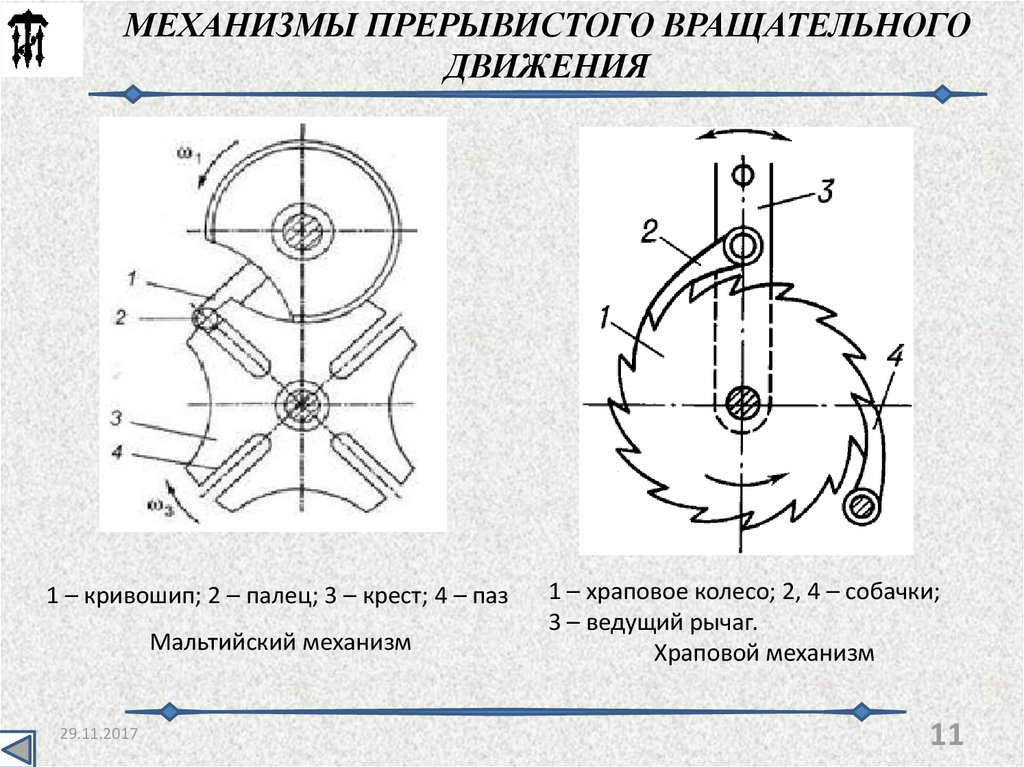
МЕХАНИЗМЫ ПРЕРЫВИСТОГО ВРАЩАТЕЛЬНОГОДВИЖЕНИЯ
1 – кривошип; 2 – палец; 3 – крест; 4 – паз
Мальтийский механизм
29.11.2017
1 – храповое колесо; 2, 4 – собачки;
3 – ведущий рычаг.
Храповой механизм
11
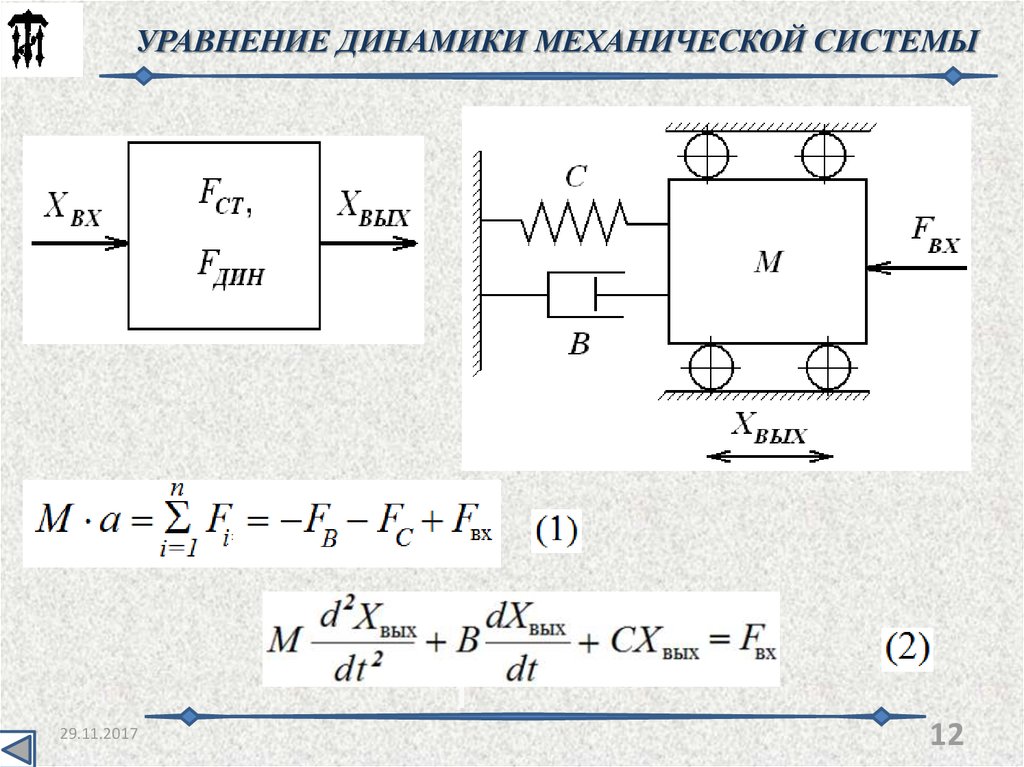
12.
УРАВНЕНИЕ ДИНАМИКИ МЕХАНИЧЕСКОЙ СИСТЕМЫ29.11.2017
12
13. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
29.11.201713
14.
ГИДРОПРИВОД1 – гидроцилиндр; 2 – поршень; 3 – шток; 4 – сальниковое уплотнение;
5 - гидрораспределитель
Принципиальная схема
29.11.2017
14
15.
ГИДРОПРИВОД6 – электромагнит;
7 – регулируемый
дроссель;
8 – электродвигатель;
9 – поршневой насос;
10 – предохранительный
клапан;
11 - резервуар
Схема в условных обозначениях
ГОСТ 2.781-96
29.11.2017
15
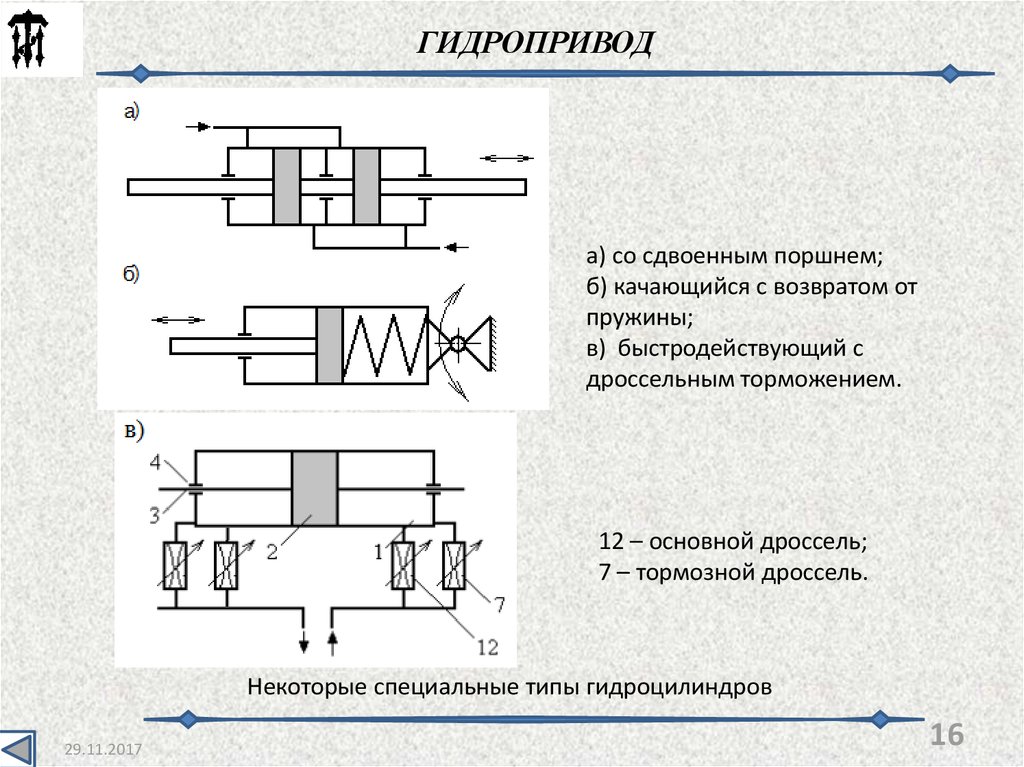
16.
ГИДРОПРИВОДа) со сдвоенным поршнем;
б) качающийся с возвратом от
пружины;
в) быстродействующий с
дроссельным торможением.
12 – основной дроссель;
7 – тормозной дроссель.
Некоторые специальные типы гидроцилиндров
29.11.2017
16
17. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГИДРОПРИВОДА (статика)
.МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГИДРОПРИВОДА (статика)
УРАВНЕНИЕ МАССОВОГО РАСХОДА
РАБОЧЕЙ СРЕДЫ
(1)
(2)
ЛИНЕАРИЗОВАННОЕ УРАВНЕНИЕ
РАСХОДА
ДАВЛЕНИЕ НА ПОРШЕНЬ
(3)
29.11.2017
17
18. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГИДРОПРИВОДА. ДИНАМИКА
.ПО КАНАЛУ «РАБОЧЕЕ ДАВЛЕНИЕ НА ПОРШНЕ – ПЕРЕМЕЩЕНИЕ ШТОКА»
УРАВНЕНИЕ ДИНАМИКИ ГИДРОЦИЛИНДРА (без учёта нелинейностей)
(1)
В ОБЛАСТИ ИЗОБРАЖЕНИЙ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
(2)
ДЛЯ ПНЕВМОЦИЛИНДРА
(3)
29.11.2017
22
19. ПНЕВМОПРИВОД В СИСТЕМАХ АВТОМАТИЗАЦИИ
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА ДРОССЕЛЬНЫХ РЕГУЛИРУЮЩИХОРГАНОВ С ПНЕВМАТИЧЕСКИМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ
19
20. ПНЕВМОПРИВОД В СИСТЕМАХ АВТОМАТИЗАЦИИ
МЕМБРАННЫЙИСПОЛНИТЕЛЬНЫЙ
МЕХАНИЗМ (МИМ)
29.11.2017
ПОДКЛЮЧЕНИЕ МИМ К ЭЛЕКТРОННОМУ
КОНТРОЛЛЕРУ ВО ВЗРЫВООПАСНОМ
ПРОИЗВОДСТВЕ
20
21.
ЭЛЕКТРОПРИВОД В СИСТЕМАХ МЕХАНИЗАЦИИНАЗНАЧЕНИЕ ЭЛЕКТРОПРИВОДА: 1) ПРИВОД ТЕХНОЛОГИЧЕСКИХ МАШИН
2) ПРИВОД РЕГУЛИРУЮЩИХ ОРГАНОВ
f
- управляющий
сигнал от
контроллера
- напряжение
f -частота
переменного
тока
S
-угловая скорость
-сила,
-угол поворота вала S -траектория
По каналу
По каналу
29.11.2017
21
22. ОСНОВНЫЕ КОМПОНЕНТЫ ЭЛЕКТРОПРИВОДОВ
УСТРОЙСТВАУПРАВЛЕНИЯ
(ПРИМЕРЫ)
МАГНИТНЫЕ
ПУСКАТЕЛИ
ТИРИСТОРНЫЕ
ПУСКАТЕЛИ
ЧАСТОТНЫЕ
ПРЕОБРАЗОВАТЕЛИ
УСИЛИТЕЛИ
ПОСТОЯННОГО
ТОКА
29.11.2017
МУФТЫ
ЭЛЕКТРОДВИГАТЕЛИ
ПОСТОЯННОГО
ТОКА
АСИНХРОННЫЕ
СИНХРОННЫЕ
ШАГОВЫЕ
ПРЕОБРАЗОВАТЕЛИ
ДВИЖЕНИЯ
(ПРИМЕРЫ)
РЕДУКТОРЫ
ЗУБЧАТО – РЕЕЧНЫЕ
МЕХ-МЫ
КРИВОШИПНОШАТУННЫЕ
МЕХАНИЗМЫ
ВОЛНОВЫЕ
ПЕРЕДАЧИ
22
23.
МУФТЫ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТАЭЛЕКТРОМАГНИТНАЯ МУФТА
29.11.2017
23
24. ЭЛЕКТРОПРИВОДНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ КЛАПАНОВ
ЭЛЕКТРОДВИГАТЕЛЬНЫЙЭЛЕКТРОМАГНИТНЫЙ
ПОДКЛЮЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ К МПК
29.11.2017
24
25. ШИРОТНО-ИМПУЛЬСНОЕ УПРАВЛЕНИЕ УГЛОМ ПОВОРОТА ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ ИМ
29.11.201725
26. СПОСОБЫ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
изменением сопротивления изменением напряженияротора
питания
29.11.2017
изменением частоты
питающего напряжения
26
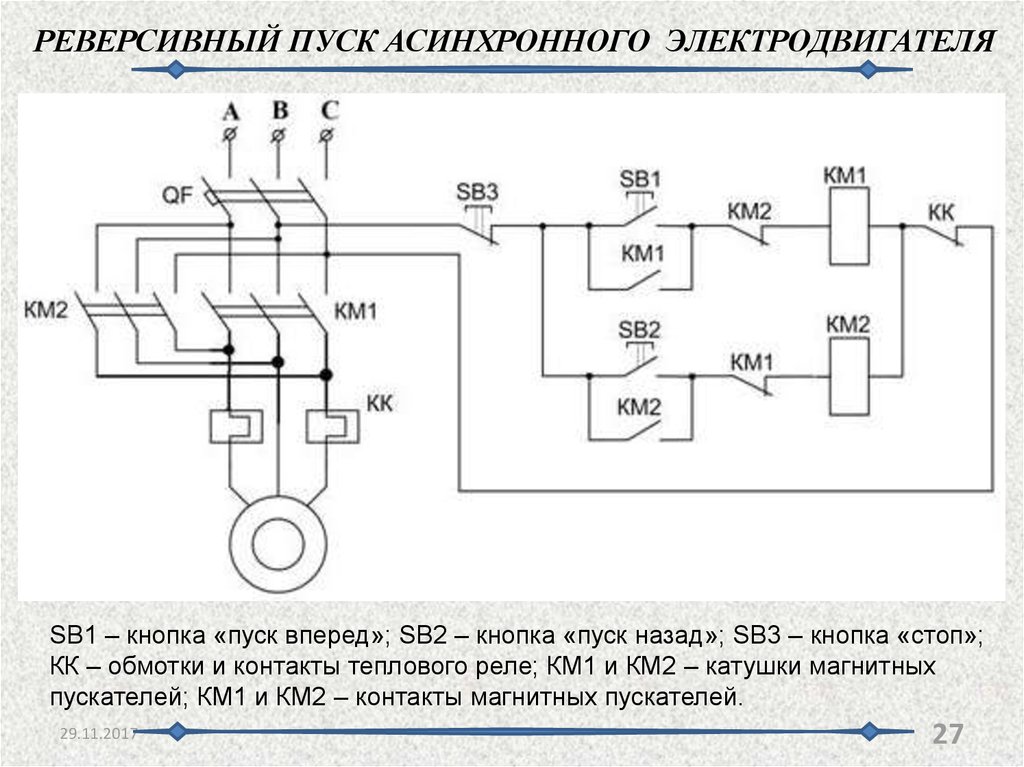
27.
РЕВЕРСИВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯSB1 – кнопка «пуск вперед»; SB2 – кнопка «пуск назад»; SB3 – кнопка «стоп»;
КК – обмотки и контакты теплового реле; КМ1 и КМ2 – катушки магнитных
пускателей; КМ1 и КМ2 – контакты магнитных пускателей.
29.11.2017
27
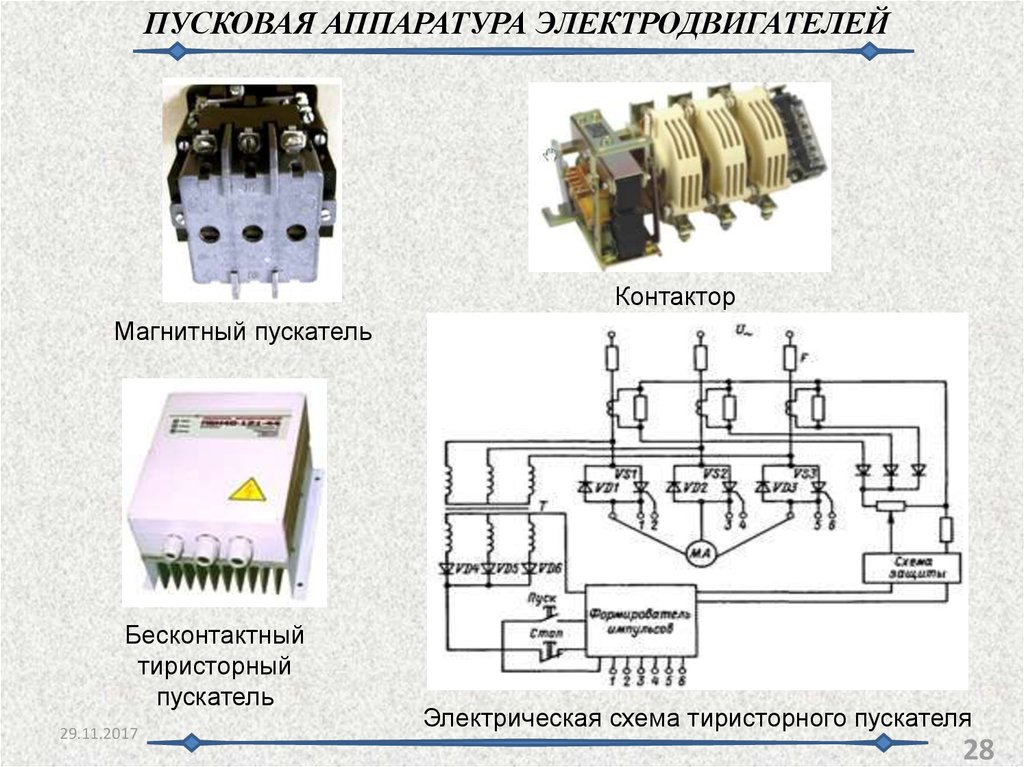
28.
ПУСКОВАЯ АППАРАТУРА ЭЛЕКТРОДВИГАТЕЛЕЙКонтактор
Магнитный пускатель
Бесконтактный
тиристорный
пускатель
29.11.2017
Электрическая схема тиристорного пускателя
28
29. СИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ ШАГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
29.11.201729
30.
ХРАНЕНИЕ И ПЕРЕРАБОТКА СЫПУЧИХ МАТЕРИАЛОВСыпучий материал – совокупность близких по размеру частиц,
которые при свободном падении с определенной высоты образуют
на горизонтальной поверхности объем в виде конуса с устойчивым
углом естественного откоса
Цементные силосы
29.11.2017
Цилиндроконический бункер
30
31. СОВРЕМЕННЫЕ СИЛОСЫ
29.11.201731
32. ЦЕМЕНТНЫЕ СИЛОСЫ
29.11.201732
33. ОСНОВНЫЕ СВОЙСТВА И ХАРАКТЕРИСТИКИ СЫПУЧИХ МАТЕРИАЛОВ
•РАЗМЕР ЧАСТИЦ (ГРАНУЛОМЕТРИЧЕСКИЙ СОСТАВ)•ПЛОТНОСТЬ
•НАСЫПНАЯ ПЛОТНОСТЬ
•УГОЛ ЕСТЕСТВЕННОГО ОТКОСА
•УГОЛ ВНУТРЕННЕГО ТРЕНИЯ
•КОЭФФИЦИЕНТ ТРЕНИЯ О ТВЁРДЫЕ НЕСУЩИЕ ПОВЕРХНОСТИ
•ВЛАЖНОСТЬ
•СВЯЗНОСТЬ ЧАСТИЦ
•ПОДВИЖНОСТЬ ЧАСТИЦ
•СКОРОСТЬ ВИТАНИЯ ЧАСТИЦ
•АБРАЗИВНОСТЬ
•ПОЖАРО- И ВЗРЫВООПАСНОСТЬ
29.11.2017
33
34.
ДАВЛЕНИЕ НА ДНО СОСУДА С СЫПУЧИМ МАТЕРИАЛОМP
H
g R
H
Г
f q
(1)
- насыпная плотность;
RГ - гидравлический радиус дна
(отношение площади к периметру)
29.11.2017
F
-коэффициент внутреннего трения;
q
- коэффициент подвижности.
34
35. ИСТЕЧЕНИЕ СМ ИЗ ОТВЕРСТИЙ
Расход при гравитационном истечении из отверстия в горизонтальномднище емкости (примеры формул)
В – эмпирический коэффициент,
(1)
зависящий от свойств материала;
- площадь отверстия истечения;
или
- эмпирический коэффициент;
(2)
K – коэффициент, зависящий от формы
и размеров отверстия истечения
Массовый расход при гравитационном истечении из наклонного отверстия с
углом наклона к горизонту
(3)
Максимальный диаметр сводообразующего отверстия
d 4,63 e
CO
29.11.2017
0 , 244 a
(4)
а – наибольший размер средней частицы
35
36. ОСОБЕННОСТИ ГРАВИТАЦИОННОЙ РАЗГРУЗКИ
а) — массовое истечение;б) — истечение с трубообразованием.
Варианты неполного опорожнения бункера
а) — центральный канал;
б) — конусная полость;
в) — «мостик»;
г) — свод.
29.11.2017
36
37.
ИНТЕНСИФИКАЦИЯ ГРАВИТАЦИОННОЙ РАЗГРУЗКИа) вставка – конус; б) вставка двойной усеченный конус
29.11.2017
37
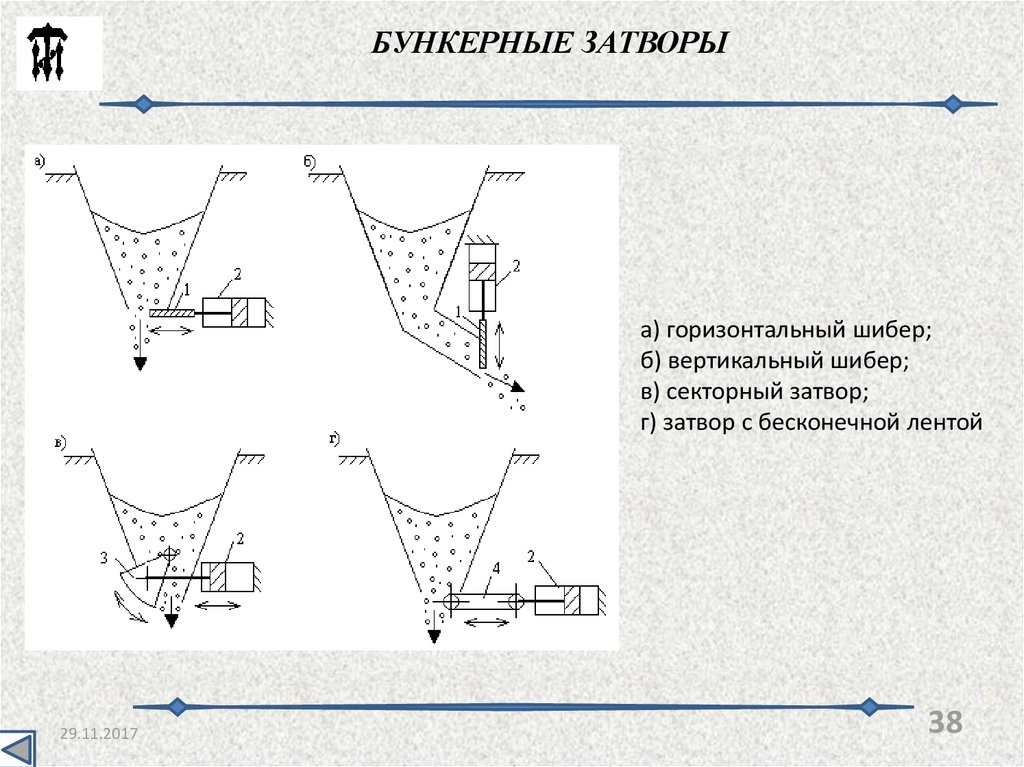
38.
БУНКЕРНЫЕ ЗАТВОРЫа) горизонтальный шибер;
б) вертикальный шибер;
в) секторный затвор;
г) затвор с бесконечной лентой
29.11.2017
38
39. МЕХАНИЧЕСКИЕ ПИТАТЕЛИ
а) тарельчатый; б) секторный; в) шнековый; г) ленточный.29.11.2017
39
40. К РАСЧЕТУ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ТАРЕЛЬЧАТОГО ПИТАТЕЛЯ
FM H 2 tg 1 Н .29.11.2017
40
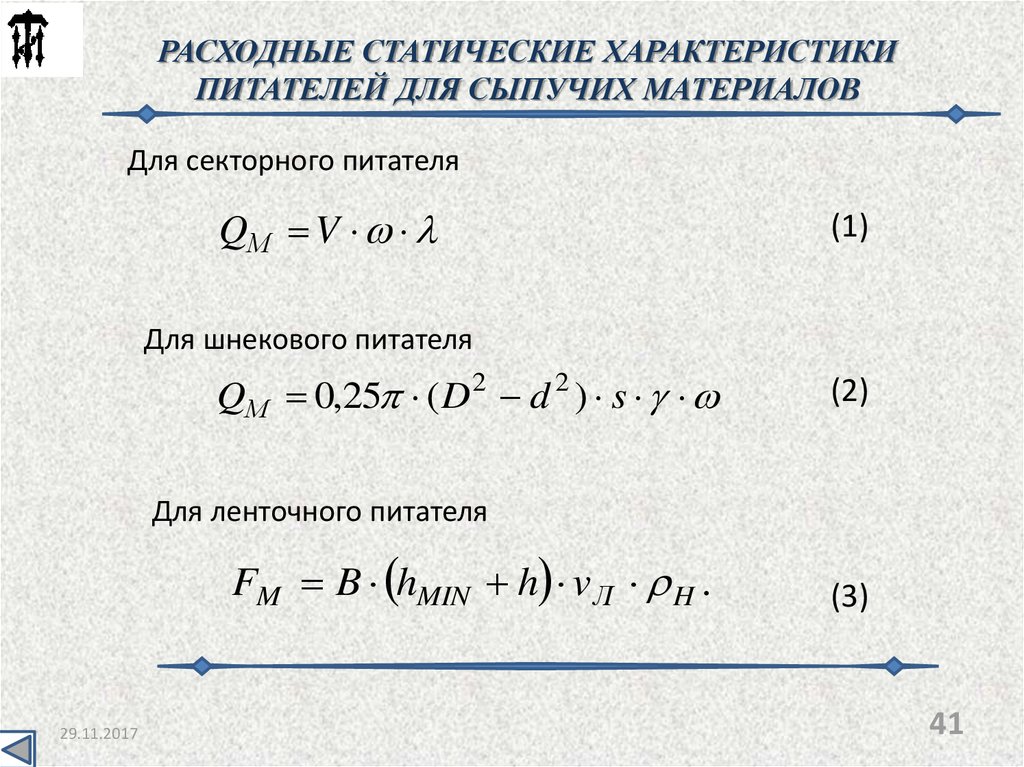
41.
РАСХОДНЫЕ СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИПИТАТЕЛЕЙ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ
Для секторного питателя
QМ V
(1)
Для шнекового питателя
QМ 0,25 ( D 2 d 2 ) s
(2)
Для ленточного питателя
FM B hMIN h v Л H .
29.11.2017
(3)
41
42.
ЛЕНТОЧНЫЙ ПИТАТЕЛЬ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ3
29.11.2017
42
43. ЛЕНТОЧНЫЙ ПИТАТЕЛЬ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ
1 – загрузочное устройство; 2 – защитный короб;3 – рабочая ветвь ленты; 4 – рабочие ролики;
5 – приводной барабан; 6 – отклоняющий ролик;
7 – поддерживающий ролик; 9 – натяжной барабан; 10 – рама.
29.11.2017
43
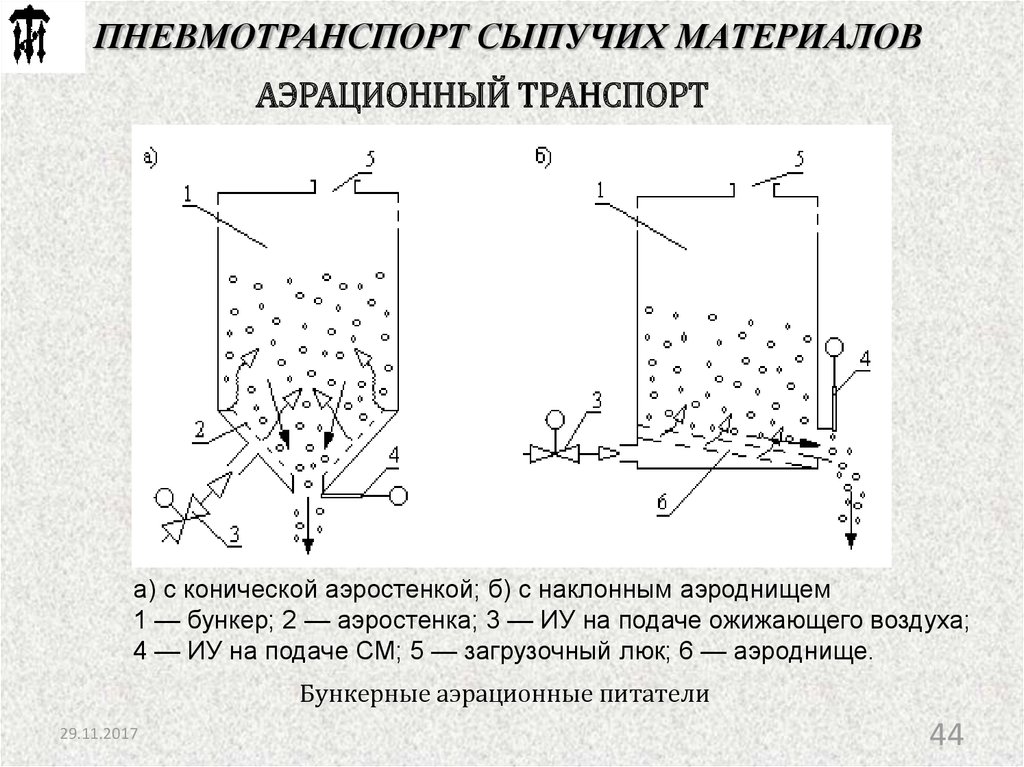
44.
ПНЕВМОТРАНСПОРТ СЫПУЧИХ МАТЕРИАЛОВАЭРАЦИОННЫЙ ТРАНСПОРТ
а) с конической аэростенкой; б) с наклонным аэроднищем
1 — бункер; 2 — аэростенка; 3 — ИУ на подаче ожижающего воздуха;
4 — ИУ на подаче СМ; 5 — загрузочный люк; 6 — аэроднище.
Бункерные аэрационные питатели
29.11.2017
44
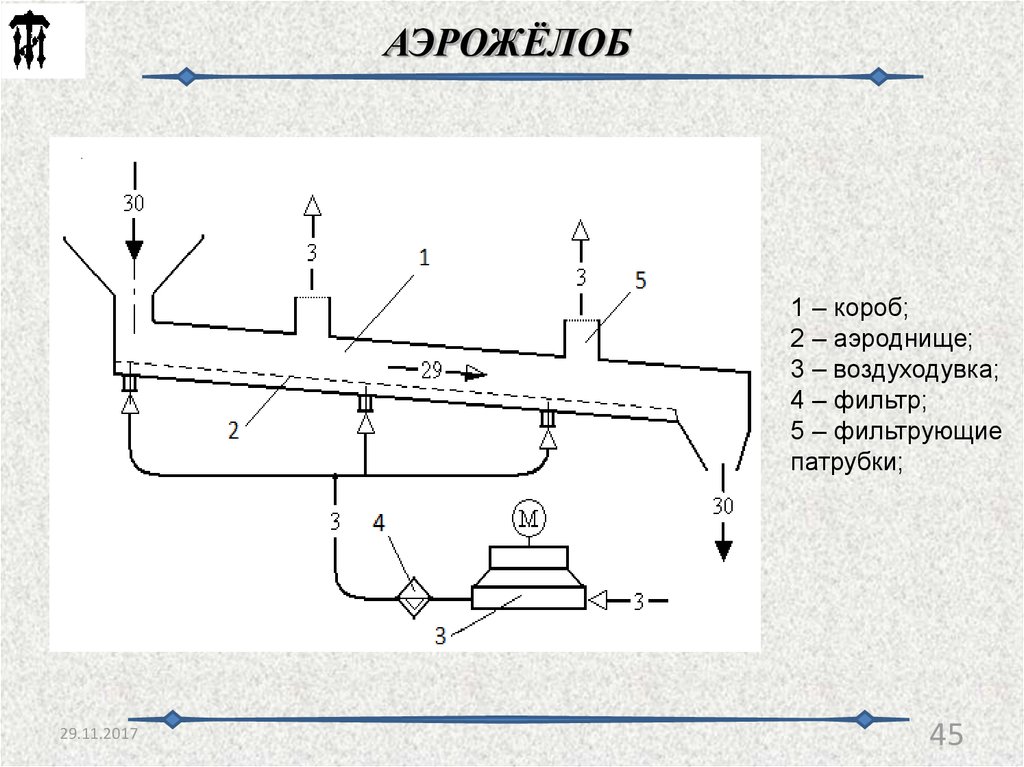
45.
АЭРОЖЁЛОБ1 – короб;
2 – аэроднище;
3 – воздуходувка;
4 – фильтр;
5 – фильтрующие
патрубки;
29.11.2017
45
46.
ПЕРЕМЕЩЕНИЕ ЗА СЧЕТ ПЕРЕПАДА ДАВЛЕНИЯ ГАЗАВСАСЫВАЮЩАЯ СИСТЕМА
1 – всасывающее сопло; 2 – материалоотделитель; 3 – секторный питатель;
4 – электропривод питателя; 5 – сепаратор; 6 – воздуходувный агрегат
29.11.2017
46
47.
ПЕРЕМЕЩЕНИЕ ЗА СЧЕТ ПЕРЕПАДА ДАВЛЕНИЯ ГАЗАНАГНЕТАТЕЛЬНАЯ СИСТЕМА
7 – пневмовинтовой насос; 8 – воздушный фильтр
29.11.2017
47
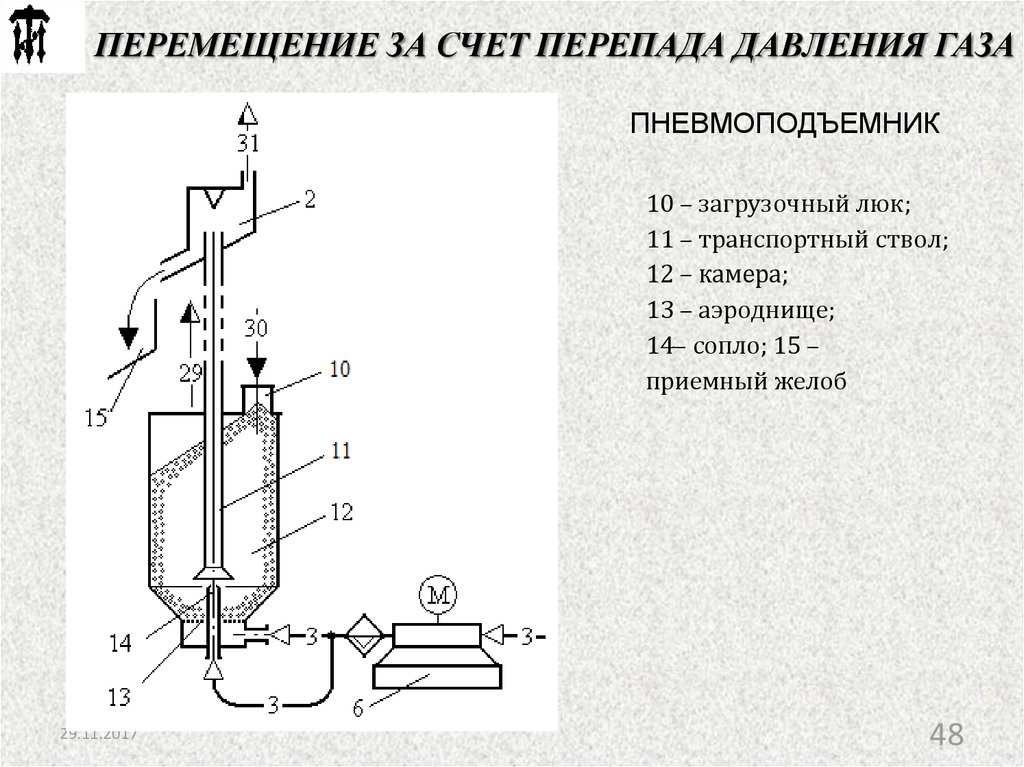
48.
ПЕРЕМЕЩЕНИЕ ЗА СЧЕТ ПЕРЕПАДА ДАВЛЕНИЯ ГАЗАПНЕВМОПОДЪЕМНИК
10 – загрузочный люк;
11 – транспортный ствол;
12 – камера;
13 – аэроднище;
14– сопло; 15 –
приемный желоб
29.11.2017
48
49.
ПНЕВМОПОБУДИТЕЛИ РАСХОДА СЫПУЧИХМАТЕРИАЛОВ
СДВОЕННЫЙ ПНЕВМОКАМЕРНЫЙ
НАСОС С ВЕРХНЕЙ ВЫГРУЗКОЙ
29.11.2017
ОДНОКАМЕРНЫЙ
НАСОС С НИЖНЕЙ
ВЫГРУЗКОЙ
49
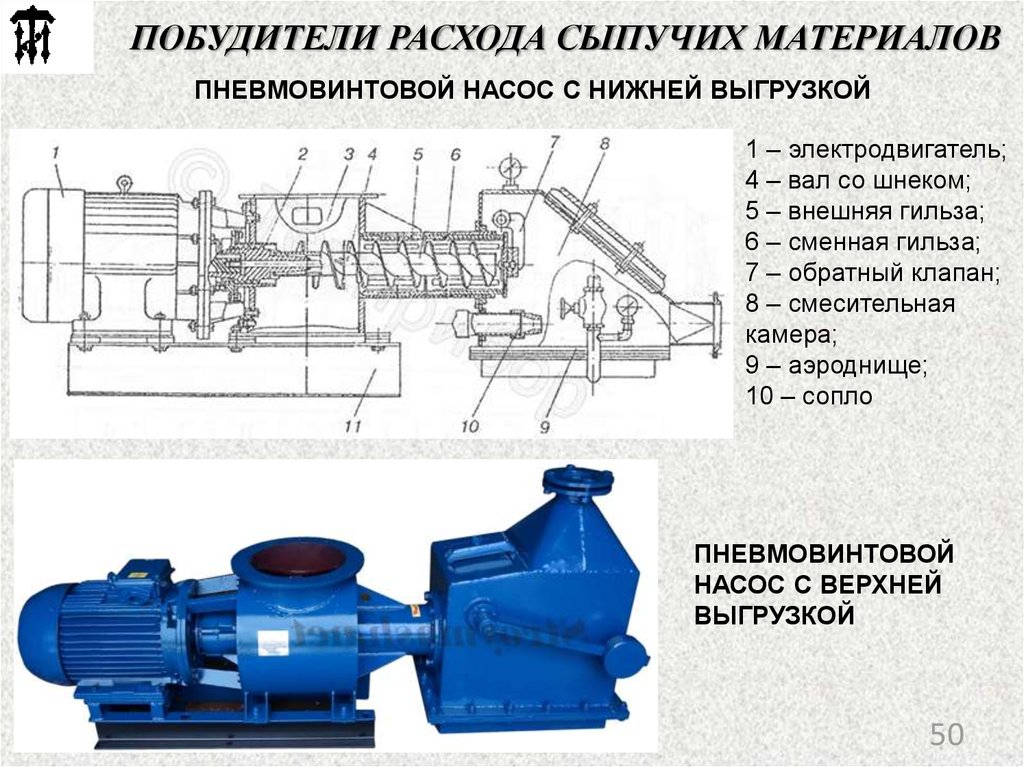
50.
ПОБУДИТЕЛИ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВПНЕВМОВИНТОВОЙ НАСОС С НИЖНЕЙ ВЫГРУЗКОЙ
1 – электродвигатель;
4 – вал со шнеком;
5 – внешняя гильза;
6 – сменная гильза;
7 – обратный клапан;
8 – смесительная
камера;
9 – аэроднище;
10 – сопло
ПНЕВМОВИНТОВОЙ
НАСОС С ВЕРХНЕЙ
ВЫГРУЗКОЙ
29.11.2017
50
51.
ПОБУДИТЕЛИ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВСТРУЙНЫЙ НАСОС
1 – загрузочный патрубок;
2 – обратный клапан;
3 – криволинейный лоток;
5 – конфузор;
6 – смесительная камера;
7 – диффузор
29.11.2017
51
52. ВИНТОВОЙ НАСОС С ПНЕВМОПОДЪЁМНИКОМ (комбинированный транспорт)
1 – АСИНХРОННЫЙ ПРИВОД6
2 – ШНЕК
3 – СМЕСИТЕЛЬНАЯ КАМЕРА
4 – ОБРАТНЫЙ КЛАПАН
5 – АЭРОДНИЩЕ
7
6 – МАТЕРИАЛООТДЕЛИТЕЛЬ
7 – РАСХОДНЫЙ БУНКЕР
1
2
3
Qв = Qв мах
4
5
29.11.2017
52
53. БАЗОВОЕ УСТРОЙСТВО: ВЕРТИКАЛЬНЫЙ ПНЕВМАТИЧЕСКИЙ ПИТАТЕЛЬ
ПРИНЦИПИАЛЬНЫЕ СХЕМЫ ВППFCH
v B2
k X S MID В
2
53
54. ВАРИАНТЫ КОНСТРУКТИВНЫХ РЕШЕНИЙ
ПИТАТЕЛИСПОСОБ
УПРАВЛЕНИЯ
РАСХОДОМ
ДОЗАТОРЫ
СПОСОБ
ВВОДА ПОТОКА
ГАЗА
СПОСОБ
ВЫГРУЗКИ
МАТЕРИАЛА
В СЛОЙ
МАТЕРИАЛА
НАПОРНЫЕ
ВАКУУМНЫЕ
ЧЕРЕЗ
МНОГОЁМКОСТНЫЕ СОПЛ
О
ВАКУУМНАПОРНЫЕ
С ГРАВИТАЦИОННЫМ
ИСТЕЧЕНИЕМ
ЧЕРЕЗ
АЭРОДНИЩЕ
КОМБИНИРОВАННЫЕ
С
ДОПОЛНИТЕЛЬ
-НЫМ
НАПОРОМ
54
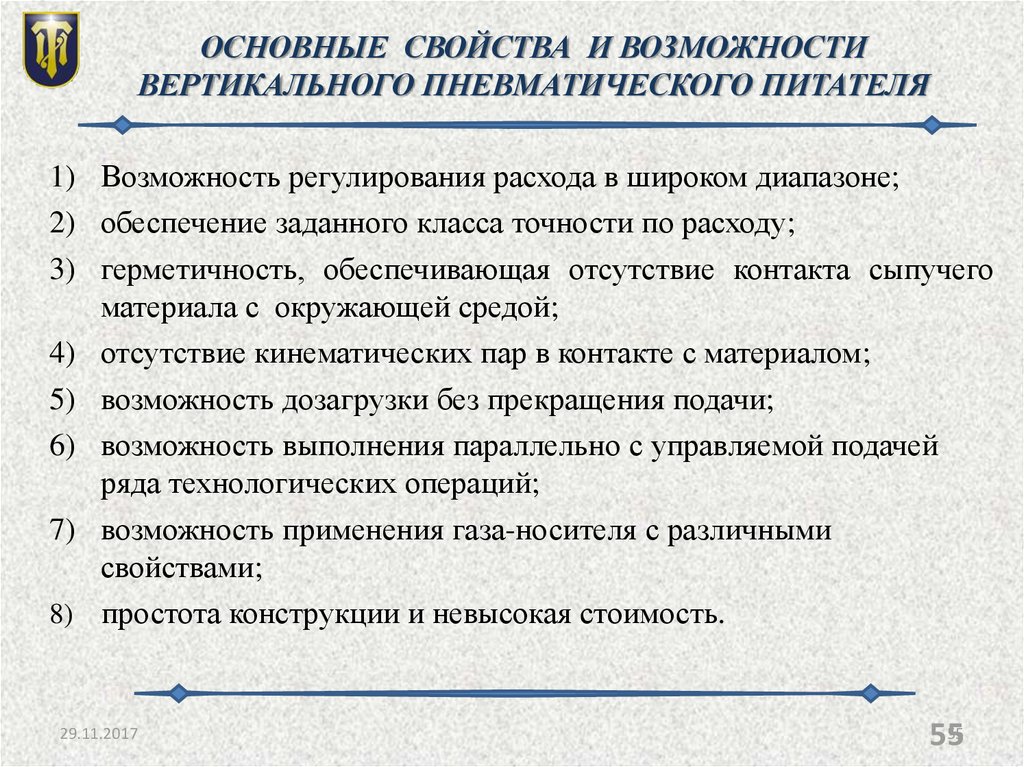
55.
ОСНОВНЫЕ СВОЙСТВА И ВОЗМОЖНОСТИВЕРТИКАЛЬНОГО ПНЕВМАТИЧЕСКОГО ПИТАТЕЛЯ
1) Возможность регулирования расхода в широком диапазоне;
2) обеспечение заданного класса точности по расходу;
3) герметичность, обеспечивающая отсутствие контакта сыпучего
материала с окружающей средой;
4) отсутствие кинематических пар в контакте с материалом;
5) возможность дозагрузки без прекращения подачи;
6) возможность выполнения параллельно с управляемой подачей
ряда технологических операций;
7) возможность применения газа-носителя с различными
свойствами;
8) простота конструкции и невысокая стоимость.
29.11.2017
55
55
56. НАПОРНЫЕ УСТРОЙСТВА
НЕПРЕРЫВНАЯПОДАЧА - ВПП
ИМПУЛЬСНОЕ ОБЪЕМНОЕ
ДОЗИРОВАНИЕ - ДФС
1 – СМЕСИТЕЛЬНАЯ ЁМКОСТЬ
2 – ЗАГРУЗОЧНЫЙ МАТЕРИАЛОПРОВОД
3 – ВЫПУСКНОЙ СТВОЛ
4 – ВОЗДУХОВОД
56
57. РАСЧЕТ СКОРОСТИ НЕСУЩЕГО ВОЗДУХА ПРИ ВЕРТИКАЛЬНОМ ПНЕВМОТРАНСПОРТЕ
Расчет скорости витания частицы материалаМинимальная скорость воздуха, необходимая для устойчивого перемещения
материала
Необходимый расход воздуха*
Скорость и расход частиц материала
Проверка по допустимой поперечной нагрузке
*Диаметр транспортного трубопровода dТР известен
29.11.2017
57
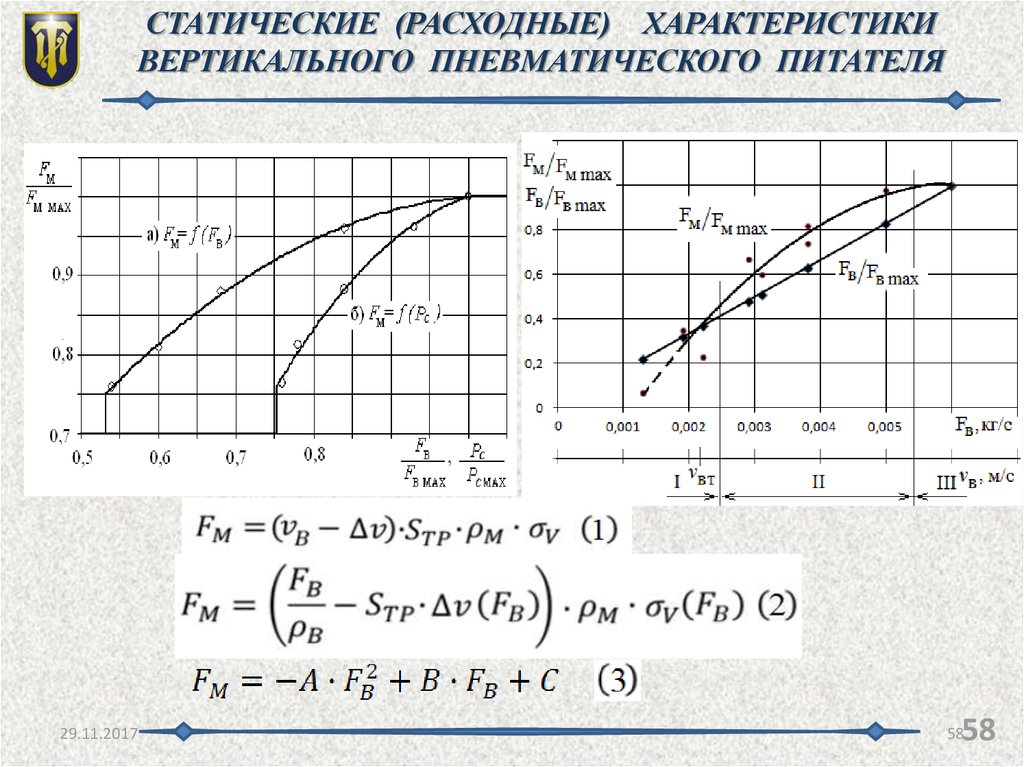
58.
СТАТИЧЕСКИЕ (РАСХОДНЫЕ) ХАРАКТЕРИСТИКИВЕРТИКАЛЬНОГО ПНЕВМАТИЧЕСКОГО ПИТАТЕЛЯ
29.11.2017
58
58
59. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВЕРТИКАЛЬНОГО ПНЕВМОПИТАТЕЛЯ
УРАВНЕНИЕ ДИНАМИКИ ДВУХФАЗНОГОПОТОКА В ТРАНСПОРТНОМ СТВОЛЕ
2
dFСМ
FCM
к H
L
РС STP 2
d t
2 STP dTP CM
ЛИНЕАРИЗОВАННОЕ УРАВНЕНИЕ
ДИНАМИКИ
dFCM
L
k * FCM PC .
STP d t
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
НА ЛИНЕЙНОМ УЧАСТКЕ СТАТИЧЕСКОЙ
ПРИ ПОСТОЯННОМ РАСХОДЕ
ХАРАКТЕРИСТИКИ
F ( p) k exp p K ИУ exp p
WИУ ( p) CM
.
PС ( p)
L STP 1 k 1 1
TИУ p 1
29.11.2017
59
59
60. АСР РАСХОДА СЫПУЧЕГО МАТЕРИАЛА (НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА БАЗЕ ВПП)
ПЕРЕХОДНЫЙ ПРОЦЕСС ПРИ ПУСКЕС УЧЁТОМ НЕЛИНЕЙНОСТИ
КОЭФФИЦИЕНТА ПЕРЕДАЧИ
60
61. О ВОЗМОЖНОСТИ ОПТИМИЗАЦИИ ЭНЕРГЕТИЧЕСКИХ ЗАТРАТ НА ПЕРЕМЕЩЕНИЕ ТВЕРДОЙ ФАЗЫ
29.11.201761
62.
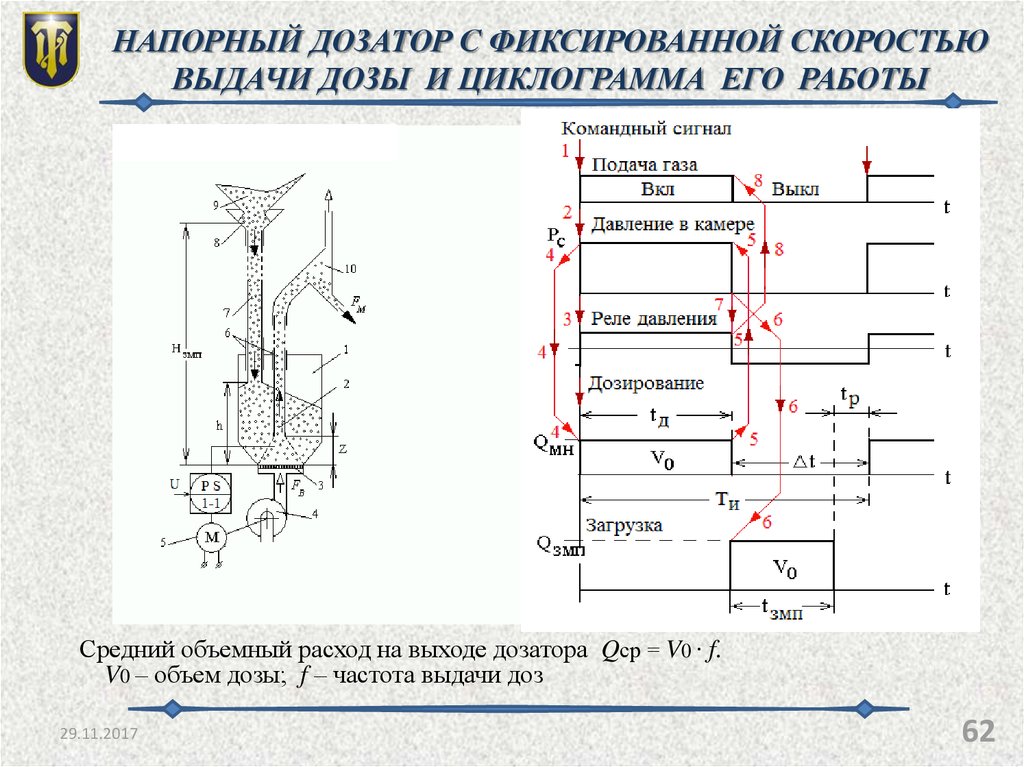
НАПОРНЫЙ ДОЗАТОР С ФИКСИРОВАННОЙ СКОРОСТЬЮВЫДАЧИ ДОЗЫ И ЦИКЛОГРАММА ЕГО РАБОТЫ
Средний объемный расход на выходе дозатора Qср = V0 ∙ f.
V0 – объем дозы; f – частота выдачи доз
29.11.2017
62
63.
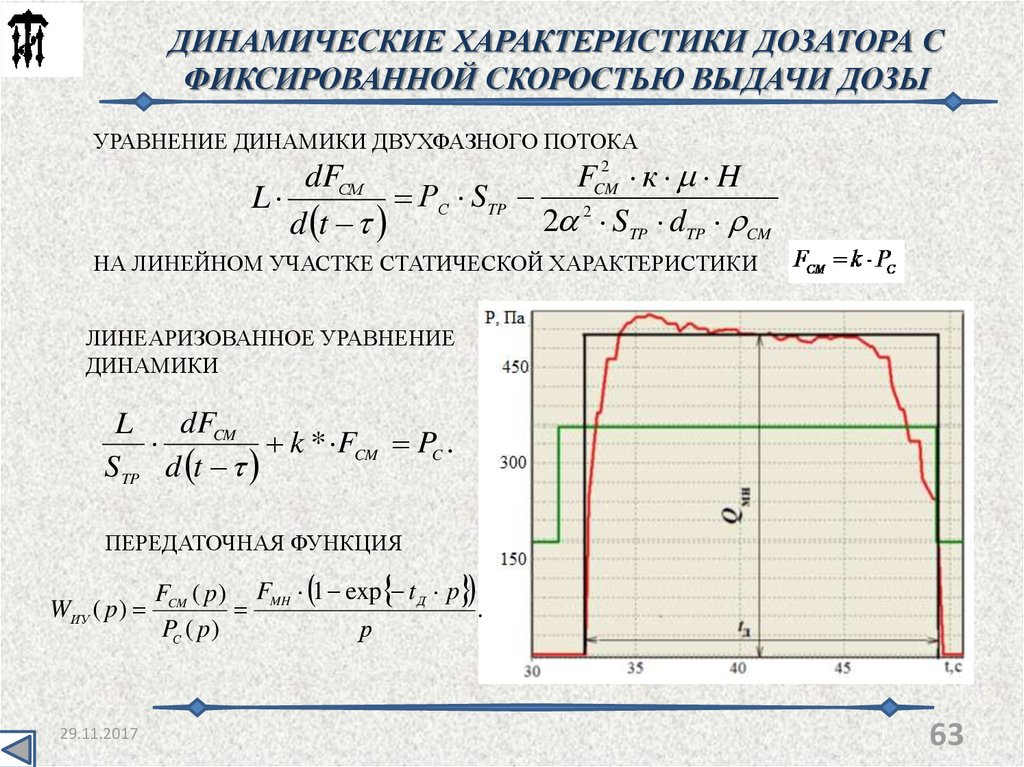
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДОЗАТОРА СФИКСИРОВАННОЙ СКОРОСТЬЮ ВЫДАЧИ ДОЗЫ
УРАВНЕНИЕ ДИНАМИКИ ДВУХФАЗНОГО ПОТОКА
2
FCM
к H
dFСМ
L
РС STP 2
2 STP dTP CM
d t
НА ЛИНЕЙНОМ УЧАСТКЕ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ
ЛИНЕАРИЗОВАННОЕ УРАВНЕНИЕ
ДИНАМИКИ
dFCM
L
k * FCM PC .
STP d t
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
WИУ ( p )
29.11.2017
FCM ( p ) FMH 1 exp t Д p
.
PС ( p )
р
63
64. АСР С ДИСКРЕТНЫМ ДОЗИРУЮЩИМ ИУ
,АСР С ДИСКРЕТНЫМ ДОЗИРУЮЩИМ ИУ
СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
РАСЧЁТ ПЕРЕХОДНОГО
ПРОЦЕССА
64
65.
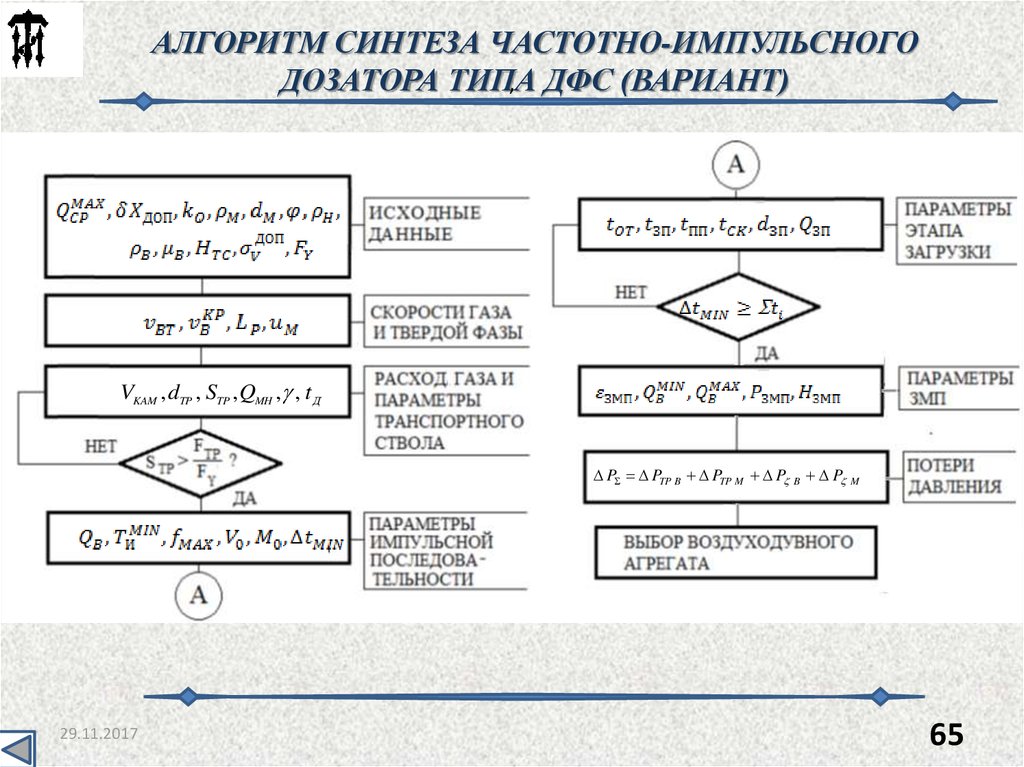
АЛГОРИТМ СИНТЕЗА ЧАСТОТНО-ИМПУЛЬСНОГО, ДФС (ВАРИАНТ)
ДОЗАТОРА ТИПА
VKAM , dTP , STP , QMH , , t Д
P PTP B PTP M P
29.11.2017
B
P M
65
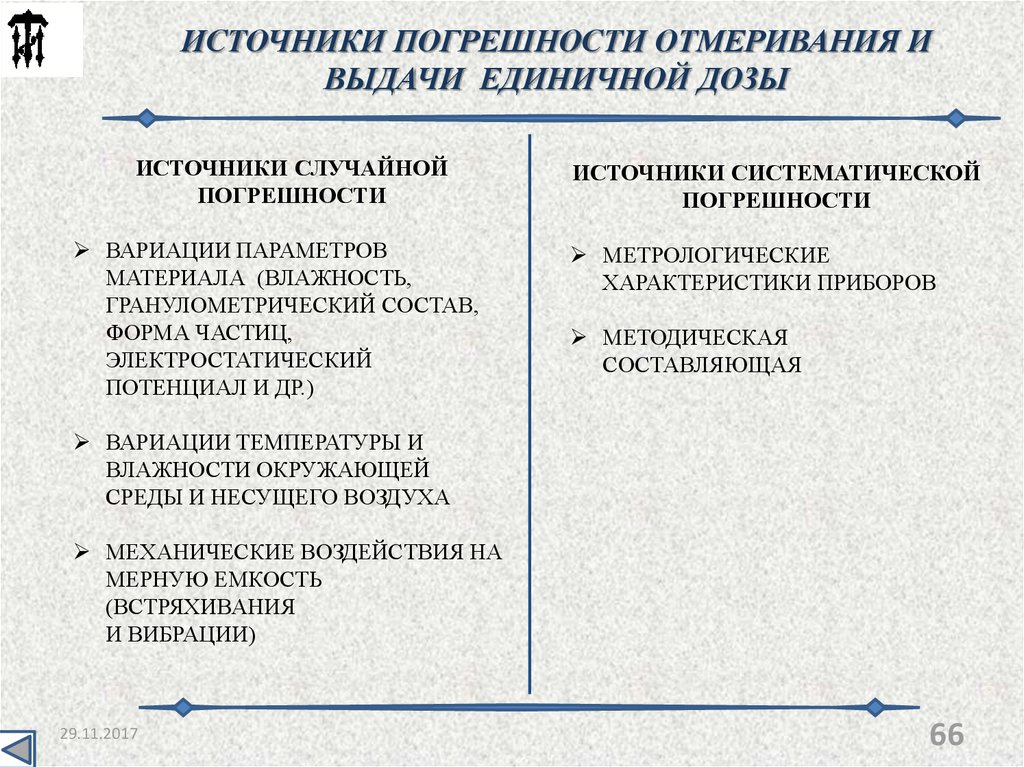
66.
ИСТОЧНИКИ ПОГРЕШНОСТИ ОТМЕРИВАНИЯ ИВЫДАЧИ ЕДИНИЧНОЙ ДОЗЫ
ИСТОЧНИКИ СЛУЧАЙНОЙ
ПОГРЕШНОСТИ
ВАРИАЦИИ ПАРАМЕТРОВ
МАТЕРИАЛА (ВЛАЖНОСТЬ,
ГРАНУЛОМЕТРИЧЕСКИЙ СОСТАВ,
ФОРМА ЧАСТИЦ,
ЭЛЕКТРОСТАТИЧЕСКИЙ
ПОТЕНЦИАЛ И ДР.)
ИСТОЧНИКИ СИСТЕМАТИЧЕСКОЙ
ПОГРЕШНОСТИ
МЕТРОЛОГИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ПРИБОРОВ
МЕТОДИЧЕСКАЯ
СОСТАВЛЯЮЩАЯ
ВАРИАЦИИ ТЕМПЕРАТУРЫ И
ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ
СРЕДЫ И НЕСУЩЕГО ВОЗДУХА
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ НА
МЕРНУЮ ЕМКОСТЬ
(ВСТРЯХИВАНИЯ
И ВИБРАЦИИ)
29.11.2017
66
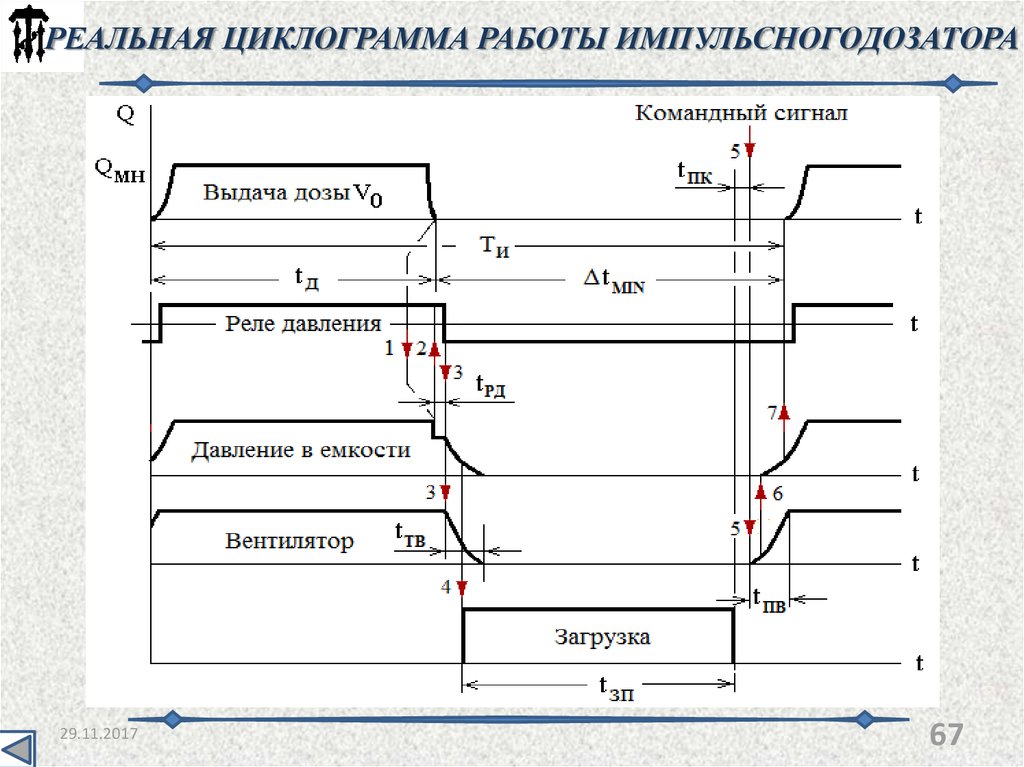
67.
РЕАЛЬНАЯ ЦИКЛОГРАММА РАБОТЫ ИМПУЛЬСНОГОДОЗАТОРА29.11.2017
67
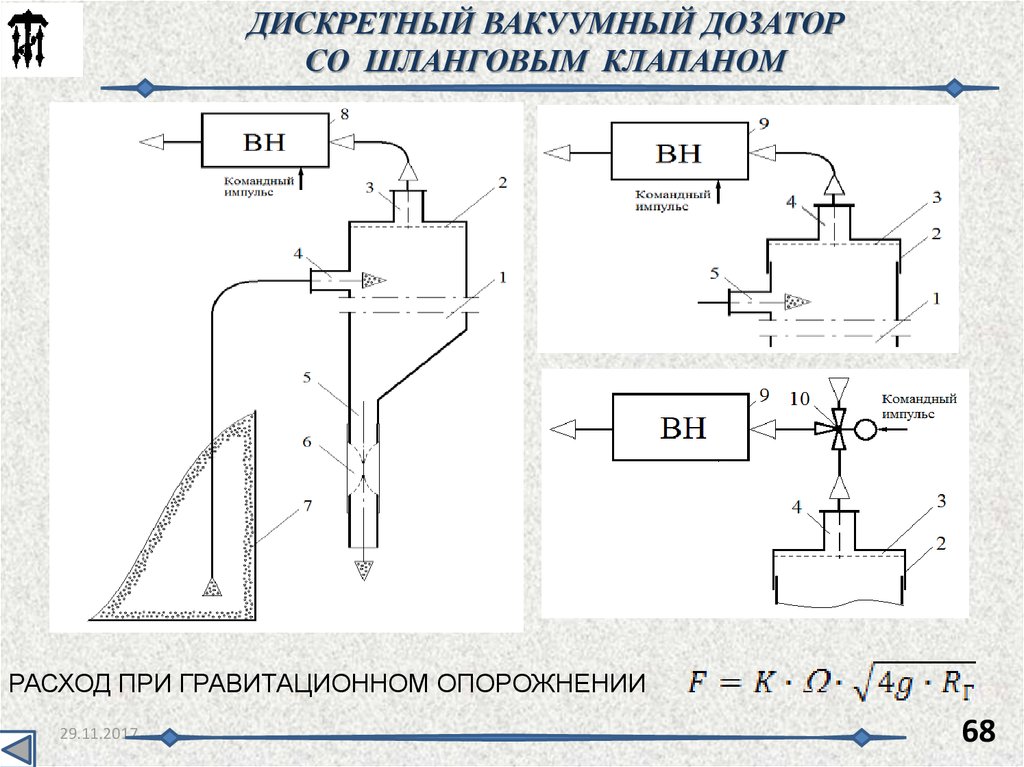
68.
ДИСКРЕТНЫЙ ВАКУУМНЫЙ ДОЗАТОРСО ШЛАНГОВЫМ КЛАПАНОМ
РАСХОД ПРИ ГРАВИТАЦИОННОМ ОПОРОЖНЕНИИ
29.11.2017
68
69. ВАКУУМНЫЕ ОБЪЁМНЫЕ ДОЗАТОРЫ С КОНИЧЕСКИМ КЛАПАНОМ
ЗАГРУЗКА МЕРНОЙ ЁМКОСТИВЫДАЧА ДОЗЫ
1 - МЕРНАЯ ЁМКОСТЬ
2 – ЗАГРУЗОЧНЫЙ
МАТЕРИАЛОПРОВОД
3 – ВОЗДУХОВОД
4 – МЕМБРАННЫЙ ПРИВОД
5 – ШТОК
6 – КОНИЧЕСКИЙ
ЗАТВОР
69
70. ВАКУУМНЫЕ ОБЪЁМНЫЕ ДОЗАТОРЫ БЕСКЛАПАННЫЙ
ЗАГРУЗКА МЕРНОЙ ЁМКОСТИВЫДАЧА ДОЗЫ
1 – МЕРНАЯ ЁМКОСТЬ
2 – ЗАГРУЗОЧНЫЙ
МАТЕРИАЛОПРОВОД
3 – ВОЗДУХОВОД
4 – ВОЗДУШНЫЙ ФИЛЬТР
70
71. ОЦЕНКА ПОГРЕШНОСТИ ВАКУМНЫХ ИМПУЛЬСНЫХ САД ОБЪЁМНОГО ДЕЙСТВИЯ
МЕТОДИКА ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ДОЗИРОВАНИЯ (ГОСТ Р8 736-2011)71
72. СПОСОБ ПОВЫШЕНИЯ БЫСТРОДЕЙСТВИЯ ВАКУУМНОГО ДОЗАТОРА
29.11.201772
73. ИМПУЛЬСНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ (на базе вакуумного ИУ)
1 – ВАКУУМНЫЙ АГРЕГАТ2 – ВОЗДУХОВОД
3 – ФИЛЬТР
4 – ЗАГРУЗОЧНЫЙ ПАТРУБОК
5 – МЕРНАЯ ЁМКОСТЬ
6 – РАСХОДНЫЙ БУНКЕР
7 – ВЫПУСКНОЙ СТВОЛ
8 – РЕЛЕ ДАВЛЕНИЯ
9 – ПУСКОВОЕ УСТРОЙСТВО
29.11.2017
73
74. МЕХАНИЗАЦИЯ ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
29.11.201774
75. ПЕРЕМЕШИВАНИЕ ВЕЩЕСТВ
НАЗНАЧЕНИЕ:РАВНОМЕРНОЕ РАСПРЕДЕЛЕНИЕ КОМПОНЕНТОВ И ТЕПЛОТЫ ПО
ОБЪЁМУ АППАРАТА
ИНТЕНСИФИКАЦИЯ
ТЕПЛОПЕРЕНОСА,
МАССОПЕРЕНОСА
И
ХИМИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ
ПЕРЕМЕШИВАНИЕ ЖИДКОСТЕЙ
ВИДЫ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ
МЕХАНИЧЕСКОЕ
29.11.2017
ПНЕВМАТИЧЕСКОЕ
СТАТИЧЕСКОЕ
ЦИРКУЛЯЦИОННОЕ
75
76. АППАРАТ С ЛОПАСТНОЙ МЕШАЛКОЙ
1 – ПРИВОД2 – РАМА
3 – УПЛОТНЕНИЕ
4 – ВАЛ
5 – КОРПУС
6 – РУБАШКА
7 – ПЕРЕГОРОДКА
8 – ЛОПАСТЬ
9 – ВВОДНАЯ ТРУБА
29.11.2017
76
77. ВИДЫ МЕХАНИЧЕСКИХ МЕШАЛОК ДЛЯ ЖИДКОСТЕЙ (с угловым приводом)
ТУРБИННАЯФРЕЗЕРНАЯ
29.11.2017
ЛОПАСТНАЯ
ПРОПЕЛЛЕРНАЯ
РАМНАЯ
СКЛАДНАЯ
77
78. ПЕРЕМЕШИВАНИЕ СЫПУЧИХ
МЕХАНИЧЕСКОЕ ПНЕВМАТИЧЕСКОЕ ВИБРАЦИОННОЕ29.11.2017
78
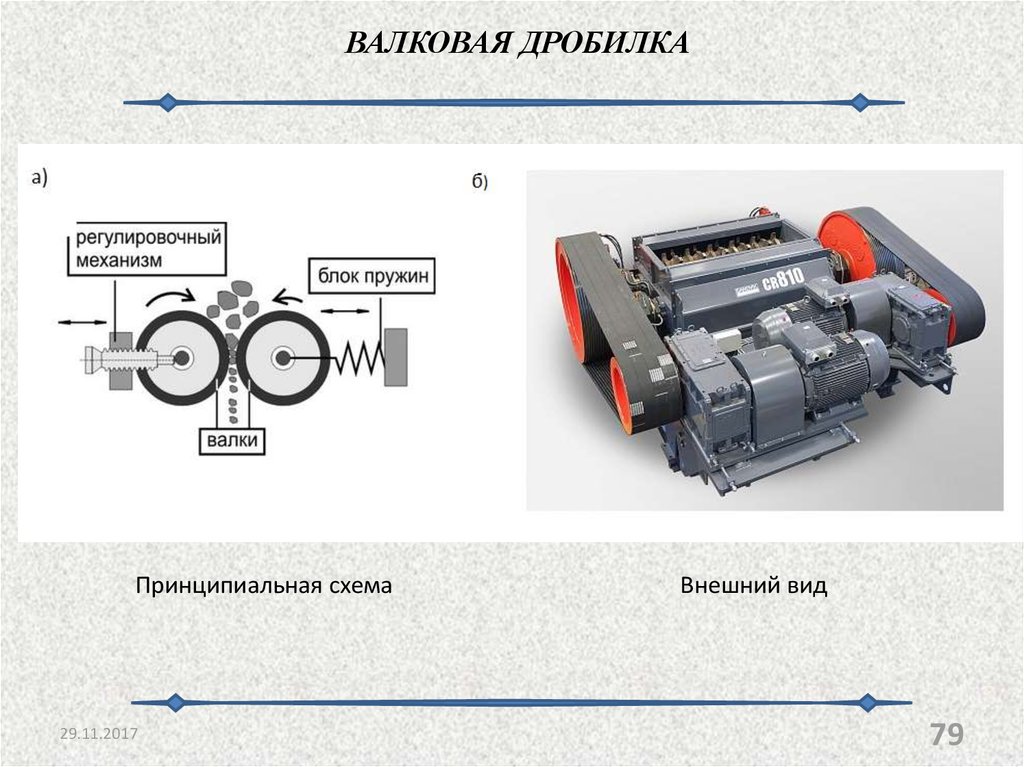
79.
ВАЛКОВАЯ ДРОБИЛКАПринципиальная схема
29.11.2017
Внешний вид
79
80. ЩЕКОВАЯ ДРОБИЛКА
29.11.201780
81. КОНУСНАЯ ДРОБИЛКА
29.11.201781
82. МОЛОТКОВАЯ ДРОБИЛКА
Принципиальная схема29.11.2017
Внешний вид
83. ВИБРАЦИОННАЯ ДВУЩЕКОВАЯ ДРОБИЛКА
1 – неподвижная щека;2 – подвижная щека;
3 – катки;
4 –корпус;
5 – пружина;
6 – дебалансный
вибропривод;
7 – упругая опора.
29.11.2017
83
84. ШАРОВАЯ МЕЛЬНИЦА
а) схема движения шаров; б) внешний вид29.11.2017
84
85. СХЕМА ПОМОЛА С РЕЦИКЛОМ
1 – шаровая мельница;2 – элеватор;
3 – сепаратор;
4 – электроприводы;
5 – подвенечная шестерня;
6 – венцовая шестерня.
29.11.2017
85
86. ВИБРАЦИОННАЯ МЕЛЬНИЦА С ВНУТРЕННИМ ДЕБАЛАНСНЫМ ВИБРОПРИВОДОМ
1 – короб; 2 – вал вибропривода; 3 – неуравновешенный груз; 4 – подшипник;5 – гибкая муфта; 6 – мелющие тела (шары); 7 – упругие опоры;
8 – загрузочный люк; 9 – разгрузочный люк.
29.11.2017
86
87. ПЛАНЕТАРНАЯ МЕЛЬНИЦА
В ПРИМЕРЕ:Крупность исходного сырья, мм — до 5
Производительность, т/час
- менее 75 мкм — до 2,0
- менее 10 мкм — до 0,7
29.11.2017
УСКОРЕНИЕ:
Лабораторные до 60 g
Промышленные до 20 g
87
88. АЭРОДИНАМИЧЕСКОЕ РАЗДЕЛЕНИЕ СУХИХ СЫПУЧИХ МАТЕРИАЛОВ ПО КРУПНОСТИ
1 – патрубок подачиИсходного материала
в потоке воздуха;
2 – распределительный
(отбойный) конус;
3 – течка крупки;
4 – проходная щель;
5 – лопатки;
6 – внутренний полый конус.
Принципиальная схема
29.11.2017
Внешний вид
88
89. СЕПАРАТОР С ВЫНОСНЫМ ВЕНТИЛЯТОРОМ
1 – вентилятор;2 – циклон;
3 – крыльчатка
29.11.2017
89
90.
РАЗДЕЛЕНИЕ СМЕСЕЙПЛОСКИЙ ГРОХОТ
29.11.2017
ВРАЩАЮЩИЙСЯ ГРОХОТ
90
91. РАЗДЕЛЕНИЕ ТВЕРДОГО И ЖИДКОСТИ
ГИДРОКЛАССИФИКАТОР1 – профилированная
виброворонка;
2 – статический отстойник;
3 – эластичная манжета,
4 – пульпопровод;
5 – вибропривод;
6 – упругая опора;
7 – транспортёр;
8 – окно;
9 – слив;
10 – заслонка с приводом
29.11.2017
91
92. КОМПЛЕКС ДЛЯ ОБЕЗВОЖИВАНИЯ ФОСФОРИТНОГО КОНЦЕНТРАТА
1 – отстойник; 2 – эластичная манжета; 3– упругая опора; 4 – виброворонка; 5 –
вибропривод; 6 – шибер; 7 – грохот; 8 –
вибропривод грохота.
I – исходная смесь; II – осветленная вода;
III, IV – концентрат
29.11.2017
92
93. РОБОТОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ
Структура программного робота29.11.2017
93
94.
СТРУКТУРА АДАПТИВНОГО РОБОТА29.11.2017
94
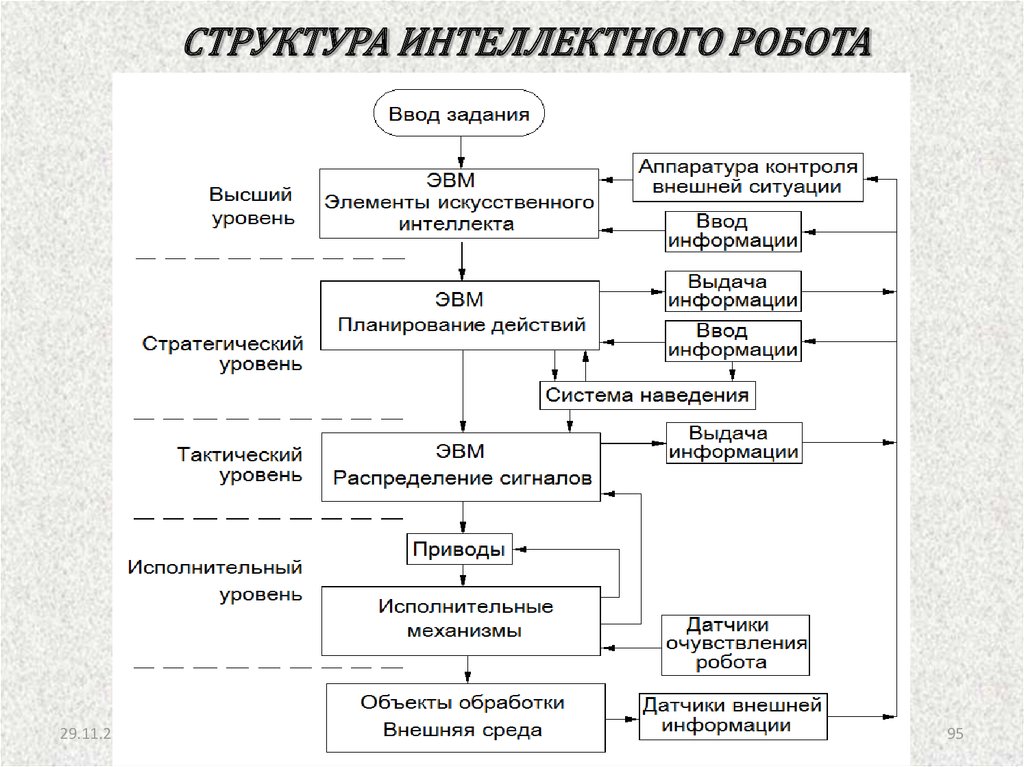
95.
СТРУКТУРА ИНТЕЛЛЕКТНОГО РОБОТА29.11.2017
95
96.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГИДРОПРИВОДА. ДИНАМИКАПо каналу «давление на поршне – расход рабочей жидкости»
Уравнение Бернулли
dF
F
L
P S
dt 2 S d
2
2
P
2
TP
TP
(1)
TP
На линейном участке статической характеристики
dF
k L
F k S P.
dt
TP
(2)
P
Передаточная функция
W p
29.11.2017
K
T р 1
(3)
96