

 Электроника
ЭлектроникаПохожие презентации:




")



. Лекция 16")

Способы обзора пространства и измерение координат целей в РЛС РТВ. Тема № 2
1.
2.
Военный учебный центрим. Героя Российской Федерации
генерала армии Дубынина В.П.
КАФЕДРА ЗРВ ВКС
Дисциплина
«Основы построения РЛС РТВ»
2
3.
Тема № 2«Способы обзора пространства и
измерение координат целей в РЛС
РТВ»
Практическое занятие № 3
«Способы формирования зоны
обнаружения в РЛС РТВ»
3
4.
Учебные цели:1. Закрепить и углубить знания, полученные
курсантами в входе лекционных и групповых
занятий.
2. Прививать курсантам методические и
практические навыки при изложении учебного
материала и решении задач.
4
5.
Учебные вопросы:Вопрос № 1. Зона обнаружения целей
трехкоординатными РЛС с ФАР.
Вопрос № 2. Особенности формирования
зоны обнаружения целей в РЛС метрового
диапазона волн.
5
6.
Учебный вопрос № 1.Зона обнаружения целей
трехкоординатными РЛС с ФАР
6
7.
Учебный вопрос № 1Сплошное РЛП создается с помощью ЗО РЛС
(трехкоординатных
РЛС
или
дальномеров
и
радиолокационных высотомеров) и оценивается внешней
границей (максимальной ДО на заданной высоте, высотой
H max
H min
нижней
и
верхней границы.
ЗО РЛС, в свою очередь, должны быть такими, чтобы
обеспечивать
надежное
обнаружение
и
проводку
современных и перспективных СВН противника во всем
диапазоне высот их полета на максимально возможной
дальности. Выполнение требований к ЗО обеспечивается
применением различных способов обзора пространства в
трехкоординатных РЛС РТВ.
7
8.
Учебный вопрос № 1Для измерения в процессе обзора зоны обнаружения трех
пространственных координат (
Д , , ) необходимо применение антенн с
узкими диаграммами направленности, как по азимуту, так и по углу места.
Однако при наличии одного узкого луча недопустимо увеличивается время
обзора пространства (игольчатая диаграмма рис. 3 в). Обеспечить
одновременный обзор всех угломестных направлений в заданном секторе в
трехкоординатных РЛС можно следующими методами:
- методом V- луча;
- методом парциальных диаграмм;
- методом частотного сканирования луча ДНА В угломестной плоскости;
- гониометрическим методом.
Все перечисленные методы предполагают механическое вращение антенны
(ППК) в азимутальной плоскости.
8
9.
Учебный вопрос № 1Метод V- луча.
Антенная система РЛС состоит из двух антенн, формирующих
вертикальную и наклонную диаграммы направленности (рис. 1), поперечное
сечение которых может быть аппроксимировано эллипсом; причем большая ось
одного эллипса перпендикулярна подстилающей поверхности («вертикальный
луч»), а другого - составляет с ней угол 45о («наклонный луч»). Поперечное
сечение общей диаграммы направленности антенны напоминает букву V , что и
дает название методу.
Н
O
β
Рис. 1 Поперечное сечение ДНА при
использовании метода V- луча.
9
10.
Учебный вопрос № 1При вращении антенной системы каждая цель облучается дважды –
сначала вертикальным, а затем наклонным лучом. Промежуток времени между
первым и вторым облучателями зависит от угла места цели ц . Чем больше
(высота полета цели), тем на больший угол по азимуту должна повернуться
антенная система, чтобы цель, облученная вертикальным лучом, была вторично
облучена наклонным лучом.
Достоинством
рассмотренного
метода
является
возможность
определения трех координат цели при достаточно большой скорости обзора
зоны обнаружения. Принцип измерения высоты полета цели методом V-луча
будет подробнее рассмотрен ниже.
10
11.
Учебный вопрос № 1Метод парциальных диаграмм.
Одновременный обзор заданного угломестного сектора обеспечивается
тем, что антенна РЛС формирует на прием в вертикальной плоскости набор
смещенных перекрывающихся друг с другом узких парциальных диаграмм (см.
рис. 2,б; 3,б,г). Такая парциальная ДН может быть сформирована следующими
способами:
а) с помощью зеркальной антенны с набором смещенных друг относительно друга по
вертикали облучателей. Каждому лепестку соответствует свой приемный канал;
б) использованием частотно-зависимых антенн. При этом каждый луч формируется на
своей частоте (происходит частотная «окраска» зоны обнаружения в угломестной
плоскости);
в) за счет использования РЛС с ФАР диаграммообразующей системы.
На излучение формируется либо один широкий луч косекансной формы (см. рис. 2,б; 3,б –
пунктирная линия) как это реализовано в РЛС 55Ж6, 22Ж6, либо набор лучей,
перекрывающих заданный угломестный сектор (рис. 3,г) (реализовано в РЛС 19Ж6). 11
12.
Учебный вопрос № 1Н
Н
εmax
Нmax
εmax
εmin
εmin
O
Линия горизонта
а
O
Линия горизонта
б
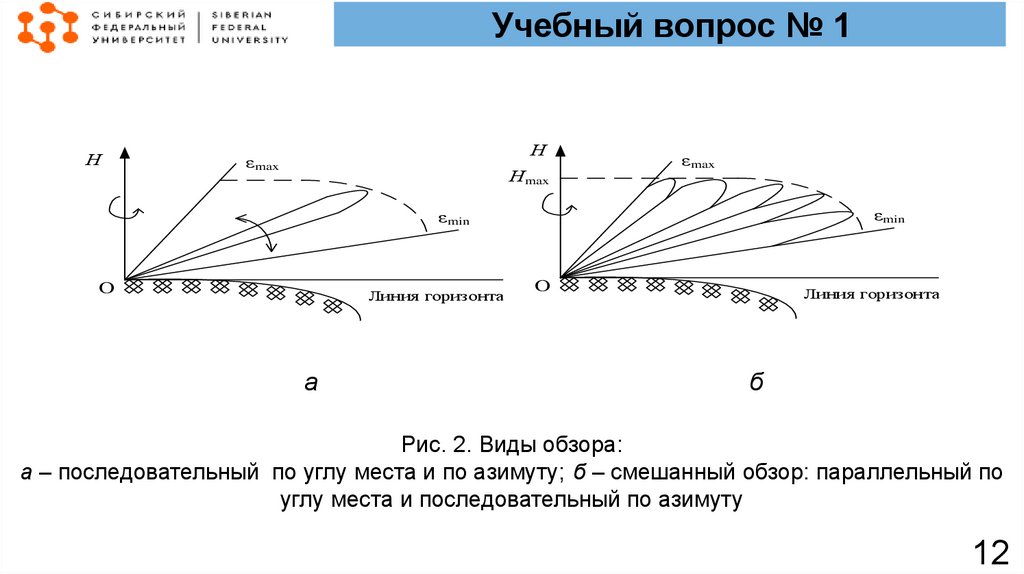
Рис. 2. Виды обзора:
а – последовательный по углу места и по азимуту; б – смешанный обзор: параллельный по
углу места и последовательный по азимуту
12
13.
Учебный вопрос № 1а)
в)
б)
г)
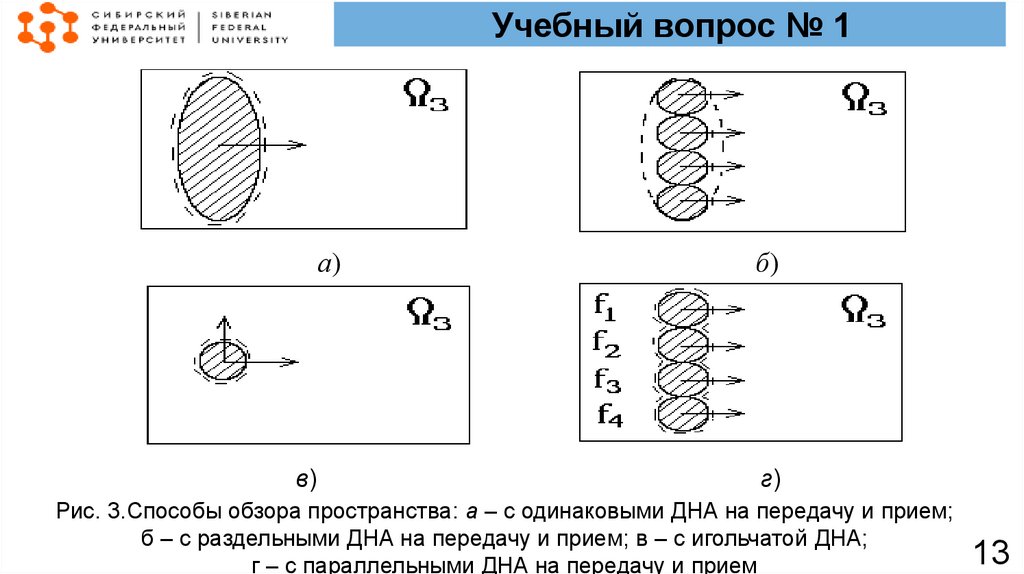
Рис. 3.Способы обзора пространства: а – с одинаковыми ДНА на передачу и прием;
б – с раздельными ДНА на передачу и прием; в – с игольчатой ДНА;
г – с параллельными ДНА на передачу и прием
13
14.
Учебный вопрос № 1Метод частотного сканирования луча.
Для обеспечения частотного сканирования луча в угломестной
плоскости (реализовано в РЛС 5Н69) применяются зондирующий ЛЧМ сигнал и
антенна с углочастотной чувствительностью. На излучение и прием используется
одна антенна.
На излучение формируется один узкий луч в обеих плоскостях (см. рис.
2,а), положение которого по углу места определяется частотой подведенных к
антенне колебаний. В течение длительности импульса u
передатчика частота
изменяется от f min до f max а луч ДНА последовательно перемещается по углу места
в пределах сектора сканирования от min до max
В результате сканирования луча цель, находящаяся под некоторым
фиксированным углом места ц , облучается лишь частью зондирующего сигнала.
Отраженный сигнал представляет собой «вырезку» из зондирующего. Его
эс определяется шириной ДНА по углу места л и скоростью
длительность
и л
сканирования ск
эс
ск
14
15.
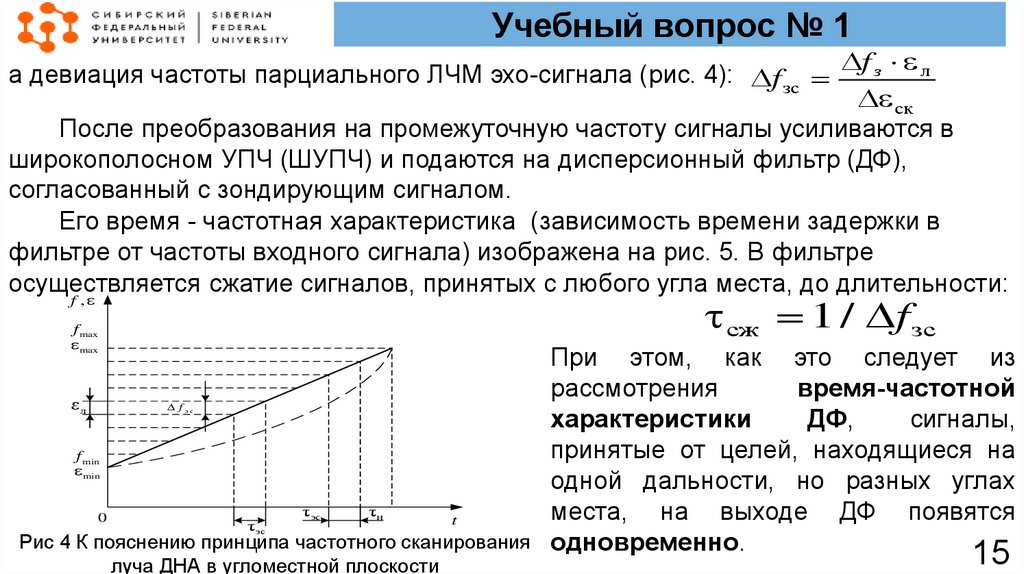
Учебный вопрос № 1f з л
ск
После преобразования на промежуточную частоту сигналы усиливаются в
широкополосном УПЧ (ШУПЧ) и подаются на дисперсионный фильтр (ДФ),
согласованный с зондирующим сигналом.
Его время - частотная характеристика (зависимость времени задержки в
фильтре от частоты входного сигнала) изображена на рис. 5. В фильтре
осуществляется сжатие сигналов, принятых с любого угла места, до длительности:
а девиация частоты парциального ЛЧМ эхо-сигнала (рис. 4): f зс
сж 1 / f зс
f ,ε
f max
ε max
εл
f эс
f min
ε min
0
τ эс
τ эс
τи
t
Рис 4 К пояснению принципа частотного сканирования
луча ДНА в угломестной плоскости
При этом, как это следует из
рассмотрения
время-частотной
характеристики
ДФ,
сигналы,
принятые от целей, находящиеся на
одной дальности, но разных углах
места, на выходе ДФ появятся
одновременно.
15
16.
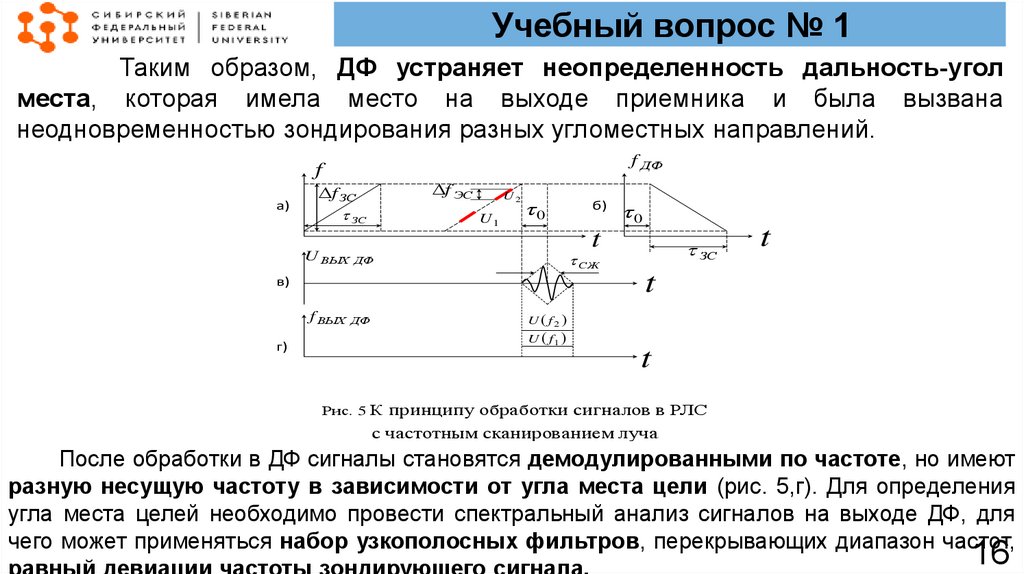
Учебный вопрос № 1Таким образом, ДФ устраняет неопределенность дальность-угол
места, которая имела место на выходе приемника и была вызвана
неодновременностью зондирования разных угломестных направлений.
f ДФ
f
а)
f ЭС
f ЗС
ЗС
U2
U1
0
0
t
U ВЫХ ДФ
ЗС
СЖ
t
t
в)
f ВЫХ ДФ
г)
б)
U f2
U f1
t
Рис. 5 К принципу обработки сигналов в РЛС
с частотным сканированием луча
После обработки в ДФ сигналы становятся демодулированными по частоте, но имеют
разную несущую частоту в зависимости от угла места цели (рис. 5,г). Для определения
угла места целей необходимо провести спектральный анализ сигналов на выходе ДФ, для
чего может применяться набор узкополосных фильтров, перекрывающих диапазон частот,
16
равный девиации частоты зондирующего сигнала.
17.
Учебный вопрос № 1Рис. 6 Структурная схема РЛС с частотным сканированием
17
18.
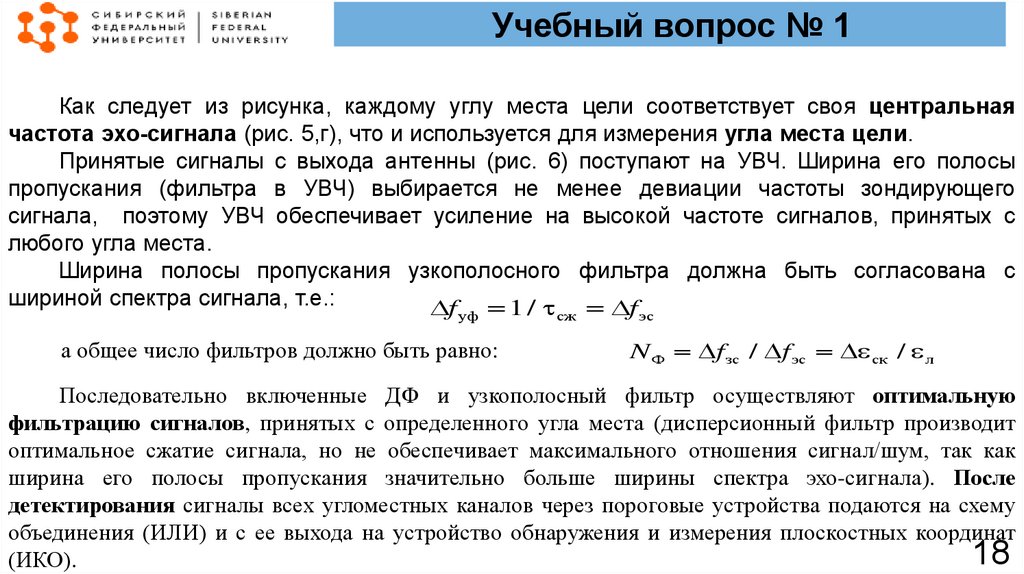
Учебный вопрос № 1Как следует из рисунка, каждому углу места цели соответствует своя центральная
частота эхо-сигнала (рис. 5,г), что и используется для измерения угла места цели.
Принятые сигналы с выхода антенны (рис. 6) поступают на УВЧ. Ширина его полосы
пропускания (фильтра в УВЧ) выбирается не менее девиации частоты зондирующего
сигнала, поэтому УВЧ обеспечивает усиление на высокой частоте сигналов, принятых с
любого угла места.
Ширина полосы пропускания узкополосного фильтра должна быть согласована с
шириной спектра сигнала, т.е.:
f 1 / f
уф
а общее число фильтров должно быть равно:
сж
эс
N Ф f зс / f эс ск / л
Последовательно включенные ДФ и узкополосный фильтр осуществляют оптимальную
фильтрацию сигналов, принятых с определенного угла места (дисперсионный фильтр производит
оптимальное сжатие сигнала, но не обеспечивает максимального отношения сигнал/шум, так как
ширина его полосы пропускания значительно больше ширины спектра эхо-сигнала). После
детектирования сигналы всех угломестных каналов через пороговые устройства подаются на схему
объединения (ИЛИ) и с ее выхода на устройство обнаружения и измерения плоскостных координат
18
(ИКО).
19.
Учебный вопрос № 1Измерение и индикация угла места и высоты целей в РЛС с частотным
сканированием может производиться теми же методами, что и в РЛС с
парциальными диаграммами направленности.
Однако реализация поочередного опроса каналов за длительность импульса встречает
значительные технические трудности, так как длительность сжатого импульса мала (в
некоторых РЛС
), поэтому устройство опроса должно быть
сж 3мкс
быстродействующим, а весь последующий тракт, включая индикатор высоты,
широкополосным.
На практике находит применение следующий метод индикации угла места. На выходе
каждого канала включены в качестве запоминающих устройств триггеры (Тг), которые в
начале каждого периода следования импульсами запуска РЛС устанавливаются в исходное
(нулевое) состояние. Появившийся эхо-сигнал переводит триггер соответствующего канала в
единичное состояние, которое сохраняется до конца периода следования. В конце каждого
периода следования осуществляется поочередной опрос всех триггеров. Очевидно, такой
опрос можно производить уже с невысокой скоростью, выделив для опроса необходимое
время в конце периода следования. Однако при таком методе считывания угломестной
информации оказывается потерянной информация о дальности цели, которая также
19
необходима для расчета высоты цели.
20.
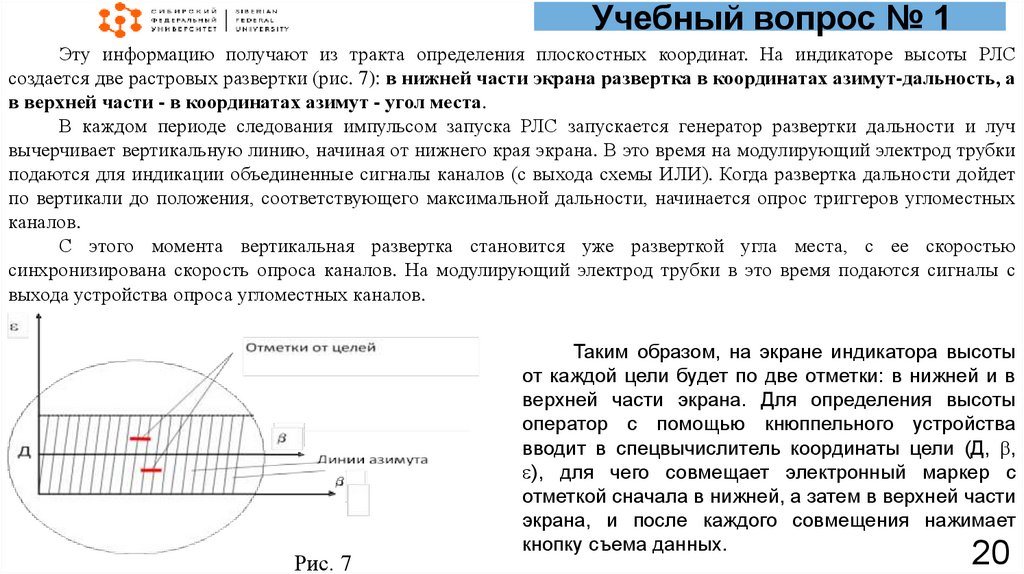
Учебный вопрос № 1Эту информацию получают из тракта определения плоскостных координат. На индикаторе высоты РЛС
создается две растровых развертки (рис. 7): в нижней части экрана развертка в координатах азимут-дальность, а
в верхней части - в координатах азимут - угол места.
В каждом периоде следования импульсом запуска РЛС запускается генератор развертки дальности и луч
вычерчивает вертикальную линию, начиная от нижнего края экрана. В это время на модулирующий электрод трубки
подаются для индикации объединенные сигналы каналов (с выхода схемы ИЛИ). Когда развертка дальности дойдет
по вертикали до положения, соответствующего максимальной дальности, начинается опрос триггеров угломестных
каналов.
С этого момента вертикальная развертка становится уже разверткой угла места, с ее скоростью
синхронизирована скорость опроса каналов. На модулирующий электрод трубки в это время подаются сигналы с
выхода устройства опроса угломестных каналов.
Рис. 7
Таким образом, на экране индикатора высоты
от каждой цели будет по две отметки: в нижней и в
верхней части экрана. Для определения высоты
оператор с помощью кнюппельного устройства
вводит в спецвычислитель координаты цели (Д, ,
), для чего совмещает электронный маркер с
отметкой сначала в нижней, а затем в верхней части
экрана, и после каждого совмещения нажимает
кнопку съема данных.
20
21.
Учебный вопрос № 1После расчета высоты спецвычислителем координаты цели (Д, , ) отображаются на
световом табло. На РЛС имеется несколько индикаторов высоты, на каждом индикаторе
отображается обстановка в определенном азимутальном секторе.
Особенностью работы на прием антенны с частотным сканированием по сравнению с
антенной с механическим сканированием является то, что она остается неподвижной в
плоскости сканирования луча и способна принимать сигналы одновременно с любого
f эс и при
угломестного направления на соответствующей этому направлению частоте
любом из запаздывании.
Если при использовании остронаправленной антенны с механическим сканированием,
переместить луч в новое угломестное направление (путем качания антенны, как в ПРВ)
можно лишь после того, как будет принят эхо-сигнал от самой удаленной цели, то в антенне с
частотным сканированием луч может перемещаться в новое направление, не дожидаясь
прихода эхо-сигналов с предыдущего сигнала, а затем в течение периода повторения до
следующего зондирующего сигнала антенна принимает эхо-сигналы от целей со всех
угломестных направлений в пределах сектора сканирования.
21
22.
Учебный вопрос № 1Достоинством РЛС с частотным сканированием является возможность адаптации
обзора в соответствии со складывающейся воздушной и помеховой обстановкой путем
изменения параметром зондирующих сигналов. Так выбором достаточно длинного сигнала с
определенной средней частотой и малой девиацией частоты можно производить длительное
зондирование определенных угломестных направлений, обеспечивая тем самым,
обнаружение сигналов в шумовых помехах повышенной интенсивности.
Кроме того, если использовать не ЛЧМ-сигнал, а зондирующий сигнал с
нелинейной частотной зависимостью (см. рис. 5 штриховая линия), то изодальностную
часть зоны обнаружения облучается сигналами большой длительности, а изовысотная часть
импульсами малой длительности. Указанная мера обеспечивает рациональное
распределение энергии в угломестной плоскости и повышает помехозащищенность от
активных шумовых помех в изодальностной части зоны обнаружения.
Недостатком РЛС с частотным сканированием является невозможность
перестройки несущей частоты зондирующих сигналов для защиты от прицельных
активных помех, а также эффекта сжатия ЛЧМ-сигнала при обработке в приемном
устройстве.
22
23.
Учебный вопрос № 2.Особенности формирования
зоны обнаружения целей в РЛС
метрового диапазона волн
23
24.
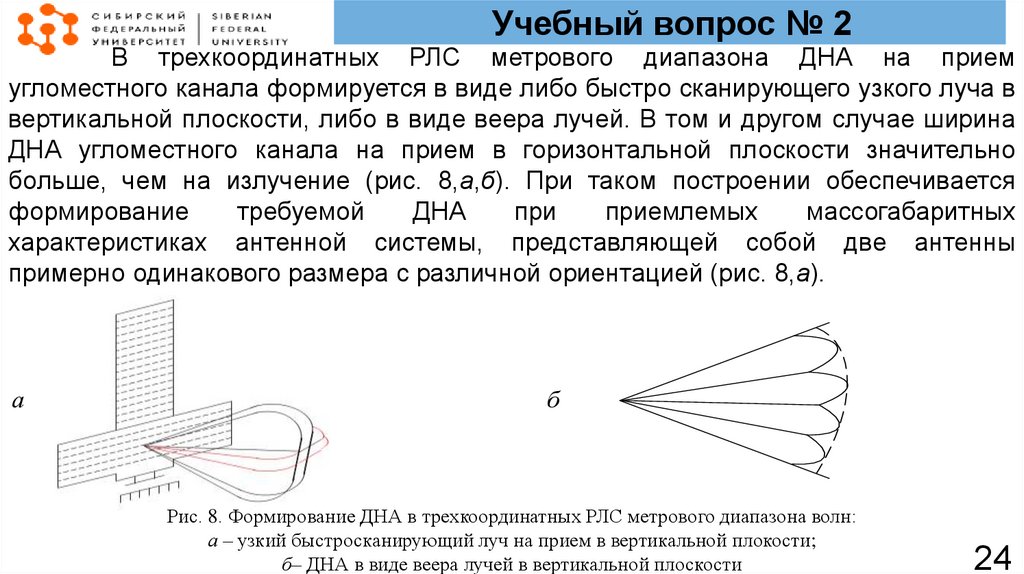
Учебный вопрос № 2В трехкоординатных РЛС метрового диапазона ДНА на прием
угломестного канала формируется в виде либо быстро сканирующего узкого луча в
вертикальной плоскости, либо в виде веера лучей. В том и другом случае ширина
ДНА угломестного канала на прием в горизонтальной плоскости значительно
больше, чем на излучение (рис. 8,а,б). При таком построении обеспечивается
формирование
требуемой
ДНА
при
приемлемых
массогабаритных
характеристиках антенной системы, представляющей собой две антенны
примерно одинакового размера с различной ориентацией (рис. 8,а).
а
б
Рис. 8. Формирование ДНА в трехкоординатных РЛС метрового диапазона волн:
а – узкий быстросканирующий луч на прием в вертикальной плокости;
б– ДНА в виде веера лучей в вертикальной плоскости
24
25.
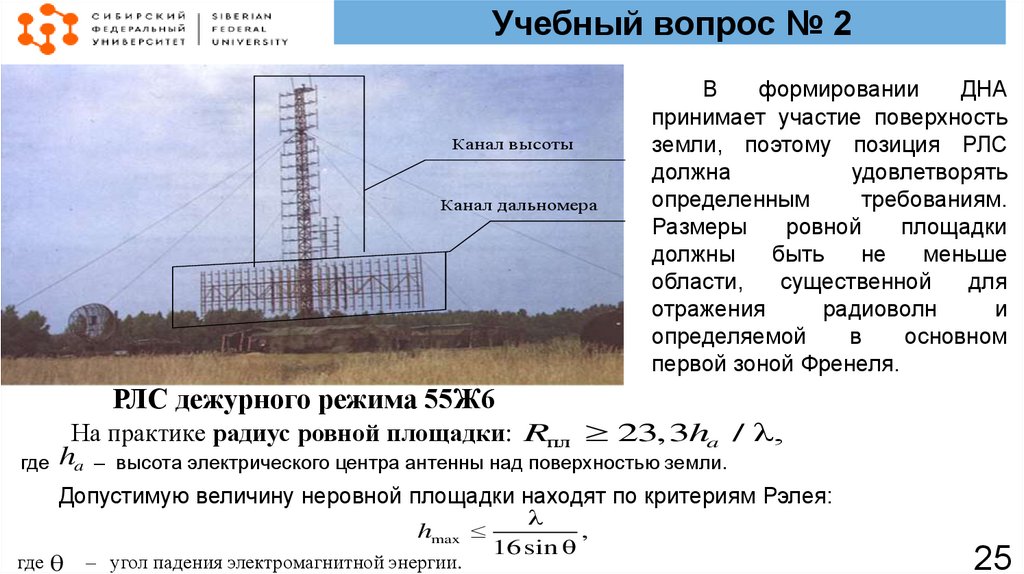
Учебный вопрос № 2Канал высоты
Канал дальномера
В
формировании
ДНА
принимает участие поверхность
земли, поэтому позиция РЛС
должна
удовлетворять
определенным
требованиям.
Размеры
ровной
площадки
должны
быть
не
меньше
области,
существенной
для
отражения
радиоволн
и
определяемой
в
основном
первой зоной Френеля.
РЛС дежурного режима 55Ж6
На практике радиус ровной площадки: Rпл 23, 3ha / λ,
где ha – высота электрического центра антенны над поверхностью земли.
Допустимую величину неровной площадки находят по критериям Рэлея:
hmax
где θ
– угол падения электромагнитной энергии.
λ
,
16 sin θ
25
26.
Учебный вопрос № 2ие
авлен
Напр ма ДНА
иму
макс
F(θ)
θ1
B
ε
θ2
A
L
εм
Линия горизонта
ε
ε
C
ε
B'
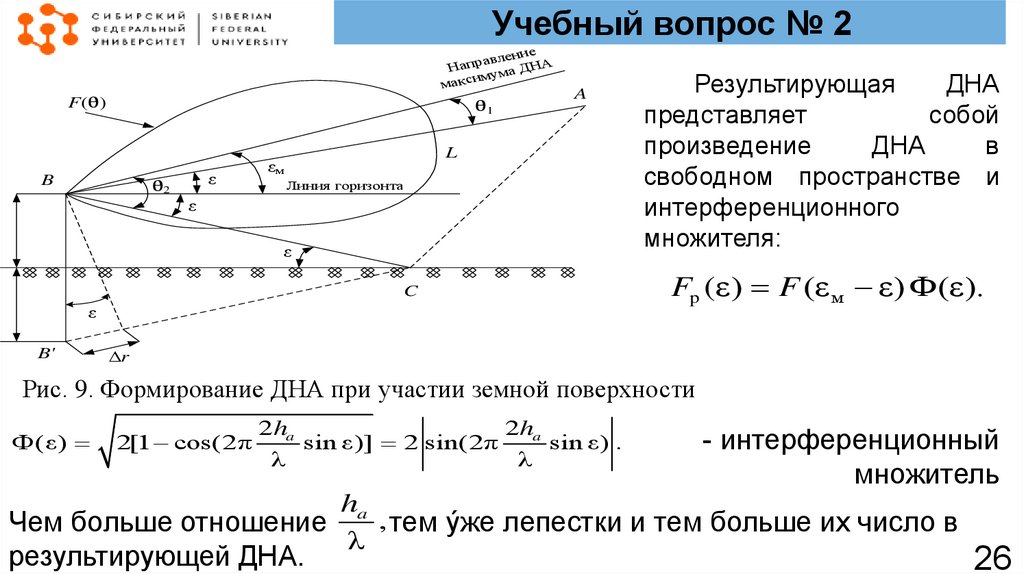
Результирующая
ДНА
представляет
собой
произведение
ДНА
в
свободном пространстве и
интерференционного
множителя:
Fp (ε) F (ε м ε) Ф(ε).
Δr
Рис. 9. Формирование ДНА при участии земной поверхности
Ф(ε)
2[1 cos(2π
2ha
2ha
sin ε)] 2 sin(2π
sin ε) .
λ
λ
- интерференционный
множитель
ha
, тем ýже лепестки и тем больше их число в
Чем больше отношение
λ
результирующей ДНА.
26
27.
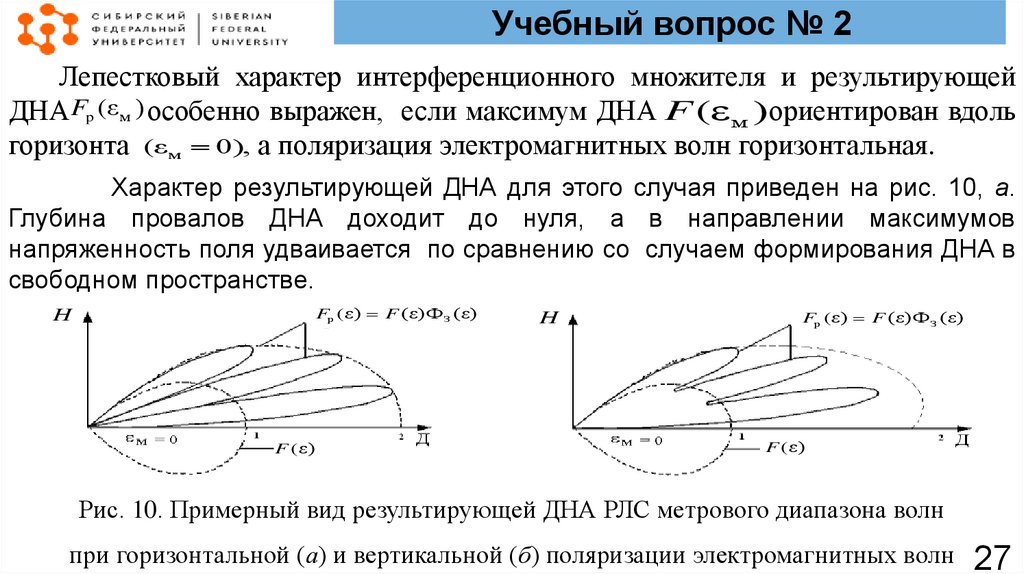
Учебный вопрос № 2Лепестковый характер интерференционного множителя и результирующей
ДНА Fp (ε м ) особенно выражен, если максимум ДНА F (ε м ) ориентирован вдоль
горизонта (ε м 0), а поляризация электромагнитных волн горизонтальная.
Характер результирующей ДНА для этого случая приведен на рис. 10, а.
Глубина провалов ДНА доходит до нуля, а в направлении максимумов
напряженность поля удваивается по сравнению со случаем формирования ДНА в
свободном пространстве.
Fp (ε) F (ε) З (ε)
H
F (ε)
H
Fp (ε) F (ε) З (ε)
F (ε)
Рис. 10. Примерный вид результирующей ДНА РЛС метрового диапазона волн
при горизонтальной (а) и вертикальной (б) поляризации электромагнитных волн
27
28.
Учебный вопрос № 21. Использование вертикально поляризованных волн.
R
1 ,
В этом случае при углах места более 3…5о модуль
коэффициента
отражения
в результате чего интенсивность отраженной волны Eотр мала. При этом глубина провалов
результирующей ДНА существенно уменьшается
(рис. 10, б). Однако возникают
дополнительные потери энергии, так как условие R 1 означает, что часть энергии, падающей
на подстилающую поверхность, бесполезно расходуется на нагрев почвы. В связи с этим в
РЛС метрового диапазона волн вертикальная поляризация излучаемой энергии применяется
редко.
2. Наклон электрической оси антенны к линии горизонта.
Этот способ находит применение в РЛС метрового диапазона
волн с зеркальными
ε 0) :
антеннами. Минимальное значение интерференционного множителя в этом случае всегда
будет больше нуля (кроме точки
F (ε м ε)
0.
F (ε м ε)
Однако уменьшается максимальное значение интерференционного множителя:
Ф min (ε) 1
Ф mах (ε) 1
F (ε м ε)
2
F (ε м ε)
28
29.
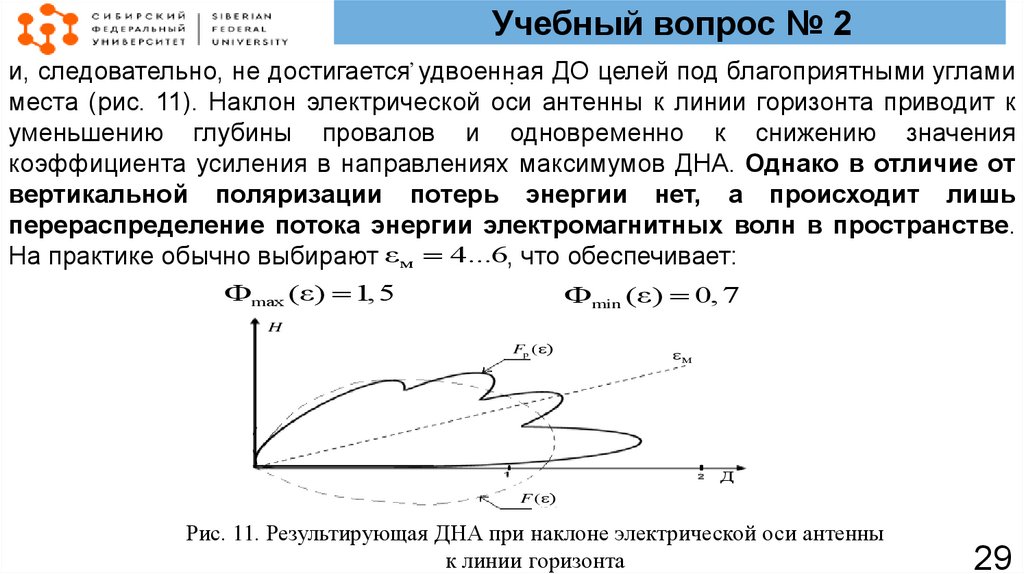
Учебный вопрос № 2,
и, следовательно, не достигается удвоенная
ДО целей под благоприятными углами
.
места (рис. 11). Наклон электрической оси антенны к линии горизонта приводит к
уменьшению глубины провалов и одновременно к снижению значения
коэффициента усиления в направлениях максимумов ДНА. Однако в отличие от
вертикальной поляризации потерь энергии нет, а происходит лишь
перераспределение потока энергии электромагнитных волн в пространстве.
На практике обычно выбирают ε м 4...6, что обеспечивает:
Фmах (ε) 1,5
Фmin (ε) 0, 7
H
Fp (ε)
εМ
Д
F (ε)
Рис. 11. Результирующая ДНА при наклоне электрической оси антенны
к линии горизонта
29
30.
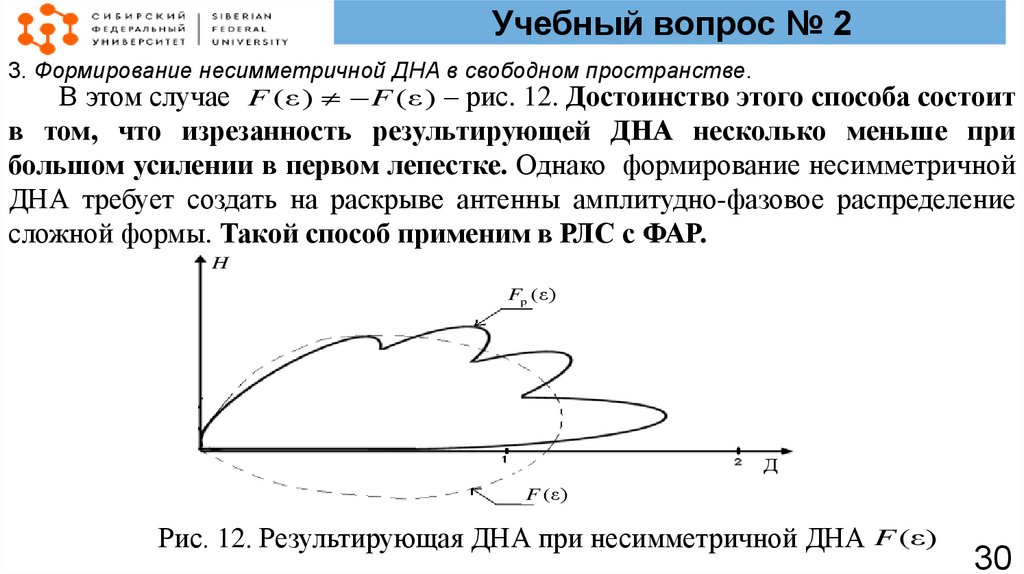
Учебный вопрос № 23. Формирование несимметричной ДНА в свободном пространстве.
В этом случае F (ε) F (ε) – рис. 12. Достоинство этого способа состоит
в том, что изрезанность результирующей ДНА несколько меньше при
большом усилении в первом лепестке. Однако формирование несимметричной
ДНА требует создать на раскрыве антенны амплитудно-фазовое распределение
сложной формы. Такой способ применим в РЛС с ФАР.
H
Fp (ε)
Д
F (ε)
Рис. 12. Результирующая ДНА при несимметричной ДНА F (ε)
30
31.
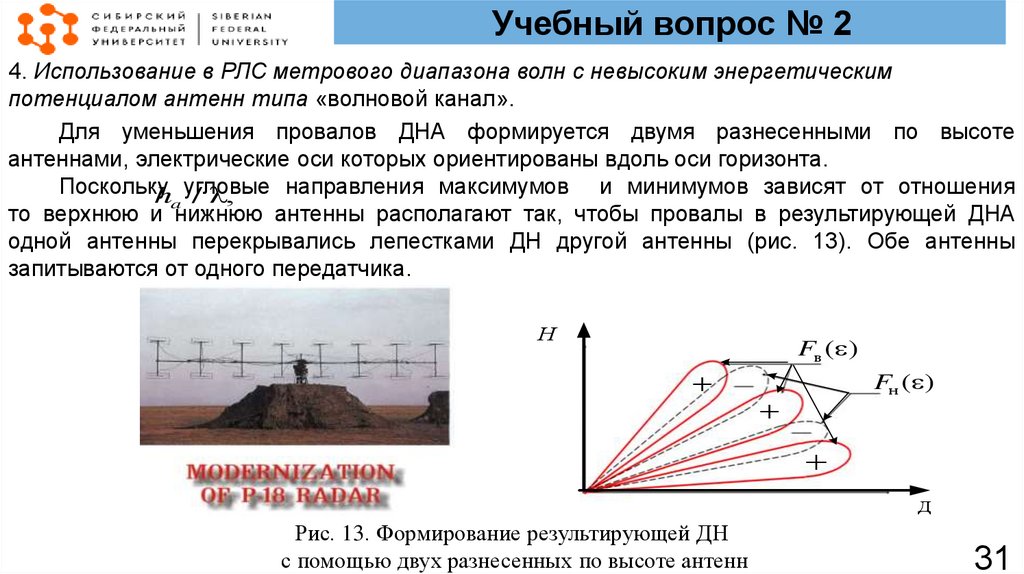
Учебный вопрос № 24. Использование в РЛС метрового диапазона волн с невысоким энергетическим
потенциалом антенн типа «волновой канал».
Для уменьшения провалов ДНА формируется двумя разнесенными по высоте
антеннами, электрические оси которых ориентированы вдоль оси горизонта.
Поскольку
направления максимумов и минимумов зависят от отношения
ha угловые
/ λ,
то верхнюю и нижнюю антенны располагают так, чтобы провалы в результирующей ДНА
одной антенны перекрывались лепестками ДН другой антенны (рис. 13). Обе антенны
запитываются от одного передатчика.
Н
Fв ( )
Fн ( )
Д
Рис. 13. Формирование результирующей ДН
с помощью двух разнесенных по высоте антенн
31
32.
Учебный вопрос № 2Так как электромагнитные поля в соседних лепестках ДНА одной и той же
антенны противофазны (на рис. 13 это показано знаками «+» и «–»), то при
синфазном питании антенн могут появиться провалы в новых направлениях.
Во избежание этого антенны запитываются со сдвигом фаз φ 90o
либо в процессе обзора пространства производится коммутация питания с
синфазного на противофазное для смещения по углу места провалов в ДНА.
Таким образом, практическое применение проанализированных
способов уменьшения провалов в результирующей ДНА РЛС метрового
диапазона волн зависит от принципов построения и конструкции антенных
систем.
32
33.
Заключительная частьОтработать материал лекции в соответствии с рекомендованной литературой:
При отработке учебных вопросов заострить свое внимание на следующем
неоспоримом важном положении:
Без надежного функционирования систем радиолокационного опознавания
невозможно эффективно и оперативно решать задачи по оценке воздушной обстановки,
целераспределению, организации взаимодействия ЗРК и перехватчиков.
Информация об обнаруженных объектах будет неполной, если не установлена
государственная
принадлежность.
Поэтому
системы
активной
локации
и
радиолокационного опознавания должны взаимодействовать между собой. Основная
задача этого взаимодействия состоит в привязке к отметкам обнаруженных объектов
информации опознавания.
33
34.
Заданиена самостоятельную подготовку
Отработать материал лекции в соответствии с рекомендованной
литературой.
- уяснить закономерность получения основных математических
выражений, их физический смысл;
- достичь четкого понимания соответствующих рисунков, графиков и
структурных схем математическим выражениям;
- самостоятельно произвести анализ математических выражений и
формул;
- установить перечень неясных вопросов, подлежащих выяснению у
преподавателя.
34
35.
Литературадля самоподготовки:
35
36.
Литературадля самоподготовки:
36