












 Электроника
ЭлектроникаПохожие презентации:




")





Методы обзора пространства при поиске сигналов в РТС
1.
МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА ПРИ ПОИСКЕ СИГНАЛОВ В РТСПоиск или обнаружение целей в некоторой области пространства называется
обзором пространства.
Временем обзора называют время однократного просмотра области
пространства. Оно зависит от размеров этой области, заданного качества
обнаружения (D, F, q) и способа обзора пространства.
Важными параметрами РЛС являются также точность и разрешающая способность
измерения координат, влияющие на время обзора пространства. Методы обзора
пространства тесно связаны с методами определения угловых координат цели.
Известны параллельный и последовательный методы обзора.
Параллельный обзор осуществляется с помощью парциальных многолучевых
диаграмм направленности антенн одновременно для всех угловых положений.
Последовательный обзор осуществляется перемещением одного антенного луча и
может производится плавно или дискретно. Плавно – с помощью
электромеханических устройств, дискретно – с помощью ФАР.
Антенная система и
опорно-поворотное
устройство РЛС П-90
"Памир"
РЛС Воронеж-М
www.kremlin.ru
2.
3.
Требования, предъявляемые к методам обзорапространства :
1. Время обзора должно быть минимальным при заданных ширине ДНА и
дальности действия станции и при обеспечении условия наблюдаемости
отметки цели (отметок целей) на экранах индикаторов станции.
2. Обеспечение возможности быстрого перехода от поиска цели к
сопровождению одной выбранной цели. Время перевода от поиска к
сопровождению цели и наоборот не должно превышать нескольких секунд.
3. Определение угловых координат цели с требуемой точностью.
4. Обеспечение возможности автоматизации процессов поиска и
сопровождения цели.
5. При обзоре должно обеспечиваться требуемое отношение сигнал-шум
при максимальной дальности действия РЛС.
Используемые методы обзора пространства
В РЛС обнаружения целей в режиме поиска чаще всего используются
последовательный, винтовой, спиральный, растровый (телевизионный) и
программируемый методы обзора пространства.
4.
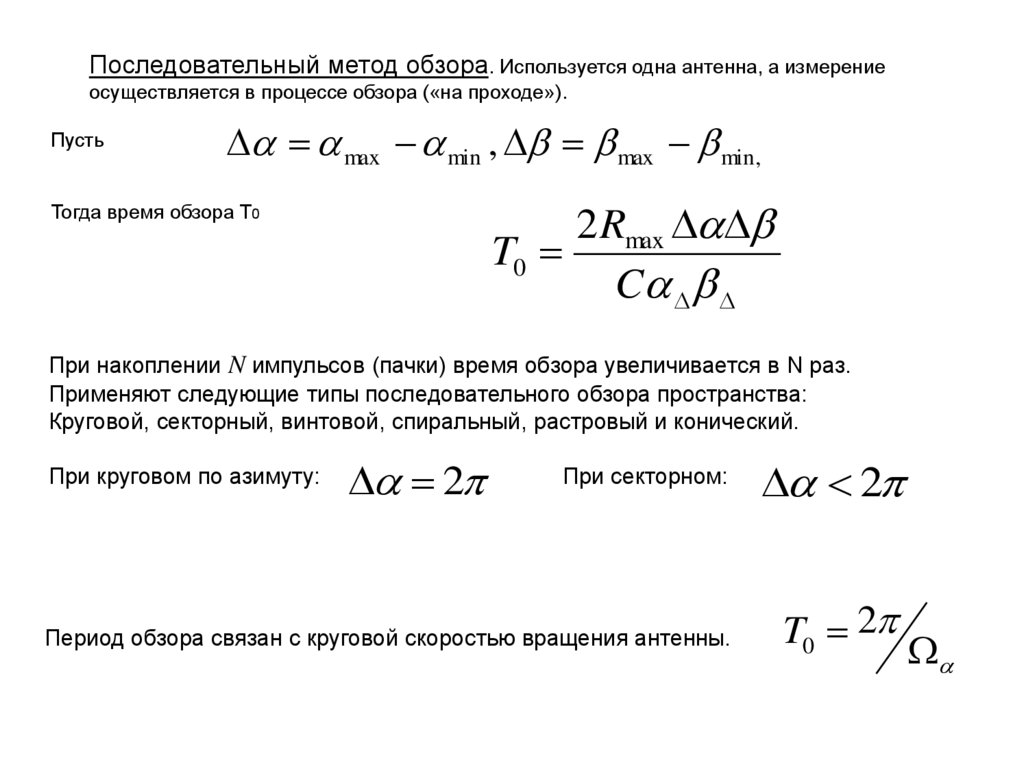
Последовательный метод обзора. Используется одна антенна, а измерениеосуществляется в процессе обзора («на проходе»).
Пусть
max min , max min,
2 Rmax
T0
C
Тогда время обзора Т0
При накоплении N импульсов (пачки) время обзора увеличивается в N раз.
Применяют следующие типы последовательного обзора пространства:
Круговой, секторный, винтовой, спиральный, растровый и конический.
При круговом по азимуту:
2
При секторном:
Период обзора связан с круговой скоростью вращения антенны.
2
T0 2
5.
Круговой метод обзора применяется обычно в двухкоординатных (дальность, азимут) РЛС.При секторном обзоре часть времени используется для обратного хода луча, поэтому
T0
kc
tох
kc 1
/ Tп N Fп / N
2 N
T0
Fп
2 Nkc
T0
Fп
Как уменьшить время обзора ?
6.
Если зона обзора велика, а время обзораограничено, то используется оригинальный метод,
сочетающий в себе электронное сканирование по
углу
места
многолучевой
диаграммой
направленности антенны на разных несущих
частотах и её одновременное вращение по азимуту.
Сканирование по углу места осуществляется
фазовым способом в пределах от -3 град до 60 град.
При этом в азимутальной плоскости за счет
углочастотной зависимости излучателей на Шобразных волноводах одновременно формируются
три прилегающих друг к другу луча.
Вращение антенного устройства по азимуту
осуществляется
электромеханическим
либо
гидравлическим комбинированным приводом. С
помощью
электромеханического
привода
осуществляется вращение с постоянной скоростью
10 об/мин или 5 об/мин. Комбинированный привод
обеспечивает переменную скорость вращения.
Этот метод обзора пространства, совместно с
набором
сложно
кодированных
зондирующих
сигналов, позволяет обеспечить одновременное
обнаружение целей, летящих на больших и средних
высотах, и маловысотных целей на фоне сильных
отражений от подстилающей поверхности, в том
числе в условиях воздействия пассивных и активных
помех.
Всевысотный обнаружитель
96Л6Е, входящий в состав
комплекса С-300 для
информационного обеспечения.
Реализует различные режимы
обзора пространства
7.
Винтовой метод обзораОбзор происходит перемещением луча антенны по
азимуту и медленным перемещением по углу места
/ 2 t1 2 /
- время на один оборот антенны.
/ t1 / 2t1 / 4 .
4 N
T0
Fп
8.
Спиральный метод обзора пространства.Обзор осуществляется при одновременном изменении угла
между осью вращения и осью диаграммы направленности
антенны.
Используя двойное перекрытии ДНА получим:
2
T0
Fп
Nsin
2 N sin
2 N sin
T0
T0
2
Fп
Fп
9.
Растровый метод обзора пространства.Растровый метод обзора пространства характеризуется быстрым перемещением луча
антенны по углу места и медленным перемещением по азимуту. Время обзора при
растровом методе составляет величину порядка 10-20 с.
2 N
T0
Fп
Увеличить скорость обзора позволяют: применение ФАР, многоканальных методов обзора
(многолучевые системы), методы адаптивного и программированного обзора, сочетание
электронного и механического сканирования.
10.
Конический обзор пространства. Является частным случаем спирального обзора приследующих условиях
/ 2 2 1,5
2 2 N sin
T0
Fп
Применяется при автосопровождении целей в РЛ, а также источников
излучения по угловым координатам.
11.
ВыводыРастровый метод обзора пространства характеризуется быстрым перемещением
луча антенны по углу места и медленным перемещением по азимуту. Время
обзора при растровом методе составляет величину порядка 10-20 с.
Винтовой метод обзора пространства характеризуется относительно быстрым
перемещением луча антенны по азимуту и медленным перемещением по углу
места. Достоинствами винтового метода являются способность станции вести
поиск без целеуказания, удобство наблюдения воздушной обстановки, простота
технической реализации. Недостатками - большое время обзора зоны
обнаружения. Время обзора может достигать 1-3 мин.
Спиральный метод обзора пространства характеризуется перемещением луча
антенны по спирали вокруг оси антенны. Достоинством спирального метода
является равномерное расширение зоны поиска во все стороны, что ведет к
сокращению времени обзора. Время обзора при спиральном методе составляет 510 с. Спиральному методу присущи недостатки: необходимость предварительного
целеуказания при поиске, изменение условий наблюдаемости отметок целей в
процессе обзора (на внешних витках спирали количество импульсов, облучающих
цель, будет меньше), сложность устройства перехода с поиска на
автосопровождение.
12.
ВТОРИЧНАЯ ОБРАБОТКАРАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Координаты мгновенного положения целей (как истинных, так и ложных) поступают в
устройство вторичной обработки, в котором в избранной системе координат формируются
отметки х. Отметка – это совокупность кодов дальности, азимута и угла места в
определенный дискретный момент времени.
В устройстве вторичной обработки на основе отметок , полученных в n соседних обзорах,
решаются задачи:
-обнаружения траекторий целей,
-сопровождения траекторий целей,
-траекторные расчеты в интересах потребителей радиолокационной информации.
Эти задачи включают в себя:
- оценивание параметров траектории;
-расчет сглаженных (интерполированных) и упрежденных (экстраполированных)
координат;
- операцию стробирования отметок целей.
Пусть отметка x1, не принадлежит ни одной из ранее сопровождаемых траекторий. Эту
отметку принимают за начальную отметку траектории цели. Т.к. известны минимальная
Vmin и максимальная Vmаx скорости цели, то можно выделить область S2 в виде кольца
с центром в первой отметке и с радиусами Rmin=VminTобз и Rmаx=VmаxTобз , в
пределах которой может находиться цель в следующем обзоре, Операция формирования
области называется стробированием, а сама область - стробом.
13.
Если в строб S2 во втором обзоре попадает отметка x2, то происходит завязка траектории,причем, если таких отметок несколько, то каждую из них рассматривают как возможное
продолжение траектории. Если в строб не попадает ни одной отметки, то происходит сброс.
Критерий завязки траектории в этом случае "2 из 2".
По двум отметкам можно определить направление движения и среднюю скорость цели ,
затем рассчитать возможное положение отметки в очередном (третьем) обзоре.
14.
На этапе автозахвата траектории принимается простейшая гипотеза о прямолинейном иравномерном движении цели. Экстраполированные значения координат вычисляются
по формуле :
xi 1 xi 2
xэi xi 1
Tобз 2 xi 1 xi 2
Tобз
Вокруг экстраполированной отметки образуется круговой строб S3, размеры которого
определяются погрешностями измерения положения отметки цели
σ
Xi
и погрешностями расчета положения экстраполированной отметки
σ X Эi :
xстр 2 (σ X ) 2 (σ X ) 2
i
эi
Факт попадания очередной получаемой отметки в строб проверяется путем сравнения
разности координат полученной xi и экстраполированной xэi отметок с размерами
полустроба. Если в строб S3 в третьем обзоре попала одна отметка, она считается
принадлежащей обнаруживаемой траектории. Процесс продолжается. Если ни одной
отметки не попадает в строб, то траектория продолжается по экстраполированной
отметке, но размеры строба увеличиваются.
15.
К устройствусопровождения
Xi
,s
x
Vmin , Vmax
Стробирование и
селекция
новых
отметок
Сглаживание параметров
траектории
Экстраполяция
координат
«Сброс»
Проверка
критерия
завязки
траектории
Проверка
критерия
подтверждения
траектории
s
x
Число
пропусков
отметок
Вычисление размеров
строба на
(n+1)-й обзор
Структурная схема алгоритма автозахвата траектории