

















 Физика
ФизикаПохожие презентации:










Физические основы механики. Динамика материальной точки
1.
Физика 1 курс, 2 семестрЛекция 3. Физические основы механики
Динамика материальной точки:
- Законы Ньютона
- Силы в механике
- Механическая система частиц
В.И. Читайкин
кандидат физико-математических наук
доцент
2.
План лекцииНаименование раздела
Номер слайда
Введение
3
Предварительные замечания
4
Раздел 1. Первый закон Ньютона
5
1.1. Первый закон Ньютона (формулировка)
6
1.2. Инерциальная система
7
Раздел 2. Второй закон Ньютона
8
2.1. Сила
9
2.2. Масса
10
2.3. Второй закон Ньютона (формулировка)
11
2.4. Уравнение движения
12
Раздел 3. Третий закон Ньютона
14
3.1. Третий закон Ньютона (формулировка)
15
3.2. Понятие замкнутой системы тел
16
Сводная таблица по законам Ньютона
18
Заключительные замечания
19
2
3.
ВведениеВ лекции 3 нашего курса начинается изучение раздела
механики – «Динамика».
Основные понятия динамики базируются на законах
Исаака Ньютона (конец XVII – начало XVIII в.в.).
Таких законов три, они будут последовательно
рассмотрены.
Динамика Ньютона, её основные понятия, положения и
законы являются фундаментом любого раздела физики
а также всех естественных наук (химии, биологии и др.) и
многочисленных технических приложений.
Исаак Ньютон
в молодости (слева) и в старости (справа)
3
4.
Предварительные замечанияДинамика – раздел механики и физики в целом. Динамика изучает взаимодействие между
телами, которое осуществляется посредством сил различной природы (гравитационных,
электромагнитных, ядерных …).
Другими словами, динамика изучает силы и их действие на тела, т.е. причины того, почему тело
(материальная точка) движется именно так, как мы наблюдаем на опыте или как мы рассчитали.
Кинематика и динамика – это два тесно связанных раздела физики; они дополняют друг друга.
Только совместное использование кинематического подхода и законов динамики (законов Ньютона)
позволяет разобраться в сложном и, подчас, запутанном движении физических тел и объектов и
получить аккуратный, полный и, главное, верный результат.
Законы динамики (законы Ньютона) получены в результате обобщения большого количества
экспериментальных данных. Именно это обеспечивает правильность ньютоновой механики и её
удивительную предсказательную способность, подтверждённую уже в течение столетий.
Развитие в ХХ веке релятивистской механики (механики больших скоростей) и квантовой
механики (механики малых масс) было осуществлено также на фундаменте механики Ньютона, т.е. с
использованием её основных положений.
Это подтверждает универсальность механики Ньютона, к изучению которой мы приступаем.
4
5.
Раздел 1. Первый закон Ньютона5
6.
1. Первый закон Ньютона1.1. Первый закон Ньютона (формулировка)
Первый закон Ньютона (он же: закон инерции) – материальное тело (точка) сохраняет состояние
покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других
тел не выведет его из этого состояния.
Такое состояние – состояние инерции. Тело, находящееся в состоянии инерции, может либо
покоиться, либо двигаться с постоянной скоростью.
Другая формулировка первого закона Ньютона:
если на тело не действуют внешние силы (точнее: равнодействующая внешних сил равна нулю), то оно (тело) будет
находиться в состоянии покоя, либо двигаться прямолинейно
с постоянной скоростью.
Пример, когда равнодействующая сила равна нулю
6
7.
1. Первый закон Ньютона1.2. Инерциальная система
Определение «Состояние инерции», сформулированное на предыдущем слайде, позволяет
ввести понятие «Инерциальная система отсчёта» – это такая система отсчёта, в которой
свободное тело либо покоится, либо движется прямолинейно и равномерно.
Т.е. в инерциальной системе отсчёта на тело не действуют внешние силы. Такое тело
называется свободным, а такая система отсчёта называется замкнутой.
Следствие: т.к. в инерциальной системе не действуют внешние силы (их либо нет, либо они
скомпенсированы), то законы динамики и механики, в целом, будут одинаковыми в любых
инерциальных системах отсчёта. Это – формулировка принципа относительности Галилея.
Практический вывод: не существует «главной» инерциальной системы отсчёта, все
равноправны. Но: есть наиболее удобная для каждой конкретной задачи. Определить её – гарантия
правильного решения.
Дополнение-вопрос: может ли тело двигаться в инерциальной системе отсчёта с ускорением?
Да, может. Если это тело взаимодействует с другими телами, входящими в состав рассматриваемой
инерциальной замкнутой системы. Такое взаимодействие порождает силу, сила порождает ускорение.
7
8.
Раздел 2. Второй закон Ньютона8
9.
2. Второй закон Ньютона2.1. Сила
Сила – это механическое воздействие на рассматриваемое тело со стороны других тел.
Силовое воздействие возможно при непосредственном контакте тел (напр., столкновение бильярдных
шаров) и посредством поля (гравитационного, электрического …), т.е. без контакта тел.
Сила задана, если известны:
- точка приложения силы к какому-либо
Пример заданной силы:
телу (материальной точке);
F
- направление действия силы;
F = 100Н
- величина (модуль) силы.
.
Если на тело (точка О) действует n сил: Fi (i = 1, 2, 3, … n),
то равнодействующая сила рассчитывается как векторная сумма:
Fравн = R = F1 + F2 + F3 + … + Fn, т.е. по правилу параллелограмма.
Нарисуйте равнодействующую силу трёх разнонаправленных сил.
9
10.
2. Второй закон Ньютона2.2. Масса
Масса – это физическая величина, характеризирующая инертность тела, т.е. его способность
«противостоять» действию силы. Чем больше масса тела, тем оно инертнее.
Экспериментально установлено, что при действии одной и той же силы F на тело с массой m1 и
на другое тело с массой m2 эти тела приобретут разные ускорения a1 и a2 , причём: a1 / a2 = m2 / m1.
Основные свойства массы в классической, ньютоновой механике:
- неизменность, масса не меняется при движении,
- аддитивность, т.е. масса нескольких тел равна сумме масс
каждого тела.
Закон сохранения массы в классической механике:
масса тела или системы тел остаётся неизменной при любых
процессах, происходящих в замкнутой системе, т.е. без
внешнего вмешательства.
Так эталон массы выглядит сейчас – см. справа. Скоро это
изменится: эталон массы будет основан на атомных параметрах и
вряд ли мы его сможем увидеть. Как это уже произошло с эталоном
секунды.
Эталон массы 1 килограмм
10
11.
2. Второй закон Ньютона2.3. Второй закон Ньютона (формулировка)
В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной
массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно
пропорционально её массе: a = F/m.
Более привычная форма второго закона Ньютона: F = m∙a.
Ускорение а и сила F – векторные величины, масса m – скаляр.
Следствие: ускорение а направлено в ту же сторону, что и действующая на тело (точку) сила F.
Если на тело с массой m действуют несколько сил одновременно (F1, F2, F3 …), то второй
закон Ньютона записывается так: m∙a = Fравн = F1 + F2 + F3 + … - принцип независимости
(суперпозиции) действия сил (сложение сил – векторное!).
Важное следствие: В условиях равновесия, точнее, в состоянии инерции:
- равнодействующая всех сил равна нулю (Fравн = F1 + F2 + F3 + … = 0),
- ускорение тела (точки) также равно нулю: а = 0.
Поэтому при равновесии (в состоянии инерции) возможно только равномерное прямолинейное
движение с постоянной скоростью (v = Const) или покой (v = 0). Вспомните кинематику.
11
12.
2. Второй закон Ньютона2.4. Уравнение движения
Уравнение движения материальной точки (тела) в динамике – это дифференциальный вид второго
закона Ньютона.
Напомню: в «обычном» (буквенном) виде второй закон Ньютона записывается так:
F = m∙a,
где сила F и ускорение a – векторные величины, масса m – скалярная величина.
Векторная форма уравнения движения.
Из кинематики известно, что вектор ускорения а есть вторая производная от радиуса-вектора точки r
(см. лекции 1 и 2):
Тогда второй закон Ньютона можно записать в дифференциальной форме:
Это – векторная форма уравнения движения.
F – это равнодействующая всех сил, действующих на тело, т.е. векторная сумма: F = F1 + F2 + F3 + …
Практическое замечание: векторное уравнение движения – это не очень удобная форма дифференциального уравнения, т.к. для его решения надо привлекать векторный анализ, что сопряжено с
громоздкими вычислениями.
12
13.
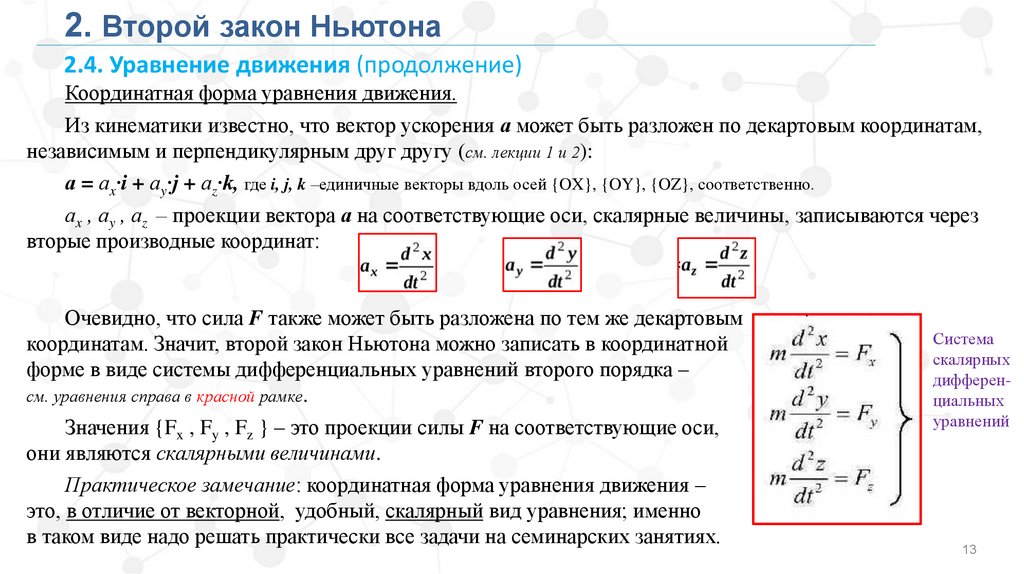
2. Второй закон Ньютона2.4. Уравнение движения (продолжение)
Координатная форма уравнения движения.
Из кинематики известно, что вектор ускорения а может быть разложен по декартовым координатам,
независимым и перпендикулярным друг другу (см. лекции 1 и 2):
а = аx∙i + аy∙j + аz∙k, где i, j, k –единичные векторы вдоль осей {OX}, {OY}, {OZ}, соответственно.
аx , аy , аz – проекции вектора а на соответствующие оси, скалярные величины, записываются через
вторые производные координат:
Очевидно, что сила F также может быть разложена по тем же декартовым
координатам. Значит, второй закон Ньютона можно записать в координатной
форме в виде системы дифференциальных уравнений второго порядка –
см. уравнения справа в красной рамке.
Значения {Fx , Fy , Fz } – это проекции силы F на соответствующие оси,
они являются скалярными величинами.
Практическое замечание: координатная форма уравнения движения –
это, в отличие от векторной, удобный, скалярный вид уравнения; именно
в таком виде надо решать практически все задачи на семинарских занятиях.
Система
скалярных
дифференциальных
уравнений
13
14.
Раздел 3. Третий закон Ньютона14
15.
3. Третий закон Ньютона3.1. Третий закон Ньютона (формулировка)
Экспериментально обнаружено, что если тело А сообщает другому телу В ускорение, то тело В
также сообщает ускорение телу А.
Тела взаимодействуют друг с другом, т.е. оказывают взаимное действие друг на друга.
Характер взаимодействия между телами определяет третий закон Ньютона:
Два тела (материальные точки) действуют друг на друга с силами, которые численно равны и
направлены по прямой, соединяющей тела (точки), но в разные стороны.
Другими словами: «каждое действие имеет противодействие».
Обратите внимание, в третьем законе говорится о равенстве
сил, а не ускорений. При равенстве сил ускорение каждого тела
будет обратно пропорционально его массе – см.слайд 10.
А
В
Формула |F1| = |F2| означает, что силы взаимодействия всегда
являются парными: если есть сила F1 , значит, должна быть сила F2 .
Принцип взаимодействия тел друг с другом позволяет
сформулировать понятие замкнутой системы тел (материальных точек) – см. след. слайд.
15
16.
3. Третий закон Ньютона3.2. Понятие замкнутой системы тел
Механическая система тел (материальных точек) – это совокупность тел (материальных точек),
выделенная для рассмотрения в рамках решаемой задачи и рассматриваемая как единое целое.
Какие тела (точки) следует включить в систему, зависит от характера решаемой задачи.
Тела (точки), образующие механическую систему, могут взаимодействовать как между собой, так и
с телами (точками), не принадлежащими к этой системе.
Поэтому силы, действующие на тела (точки) системы, могут быть внутренними и внешними.
Внутренние силы – это силы, которые действуют на каждое тело (точку) системы со стороны
других тел (точек) этой же системы.
Внешние силы – это силы, действующие на тела (точки) системы со стороны других тел (точек), не
принадлежащих системе.
Механическая система называется замкнутой, если внешние силы отсутствуют.
Другими словами, механическая система тел (точек) является замкнутой (изолированной), если на
тела (точки) этой системы не действуют внешние силы.
В задачах, как правило, мы будем иметь дело с замкнутыми механическими системами.
16
17.
3. Третий закон Ньютона3.2. Понятие замкнутой системы тел (примеры)
Характерные примеры взяты из задач.
Пример 1. Тело (снаряд) выстреливают из пушки.
Замкнутая система – есть:
1. Снаряд
2. Пушка
3. Планета Земля, притяжение которой «создаёт» ускорение
свободного падения g
Пример 2. Скатывание бруска по наклонной плоскости.
Замкнутая система – это:
1. Брусок
2. Наклонная плоскость, «создающая» трение
3. Планета Земля, «создающая» притяжение (вектор g)
17
18.
Сводная таблица по законам НьютонаВнимание: используется
обозначение скорости
курсивом (v), рисунок взят из
интернета.
18
19.
Заключительные замечания1. Законы Ньютона являются основными законами механики. Они позволяют решить
любую механическую задачу. Из них могут быть выедены все остальные законы механики.
2. Законы Ньютона (законы механики) одинаковы в любой инерциальной системе отсчёта.
Основное уравнение – уравнение второго закона Ньютона: m∙a = F – будет иметь и тот же вид в
любой инерциальной системе отсчёта.
Действительно:
- Масса тела не зависит от скорости, т.е. одинакова во всех системах отсчёта;
- Сила определяется только взаимным расположением тела относительно других тел,
обуславливающих взаимодействие, т.е. тел в замкнутой системе. Это взаимное расположение
тел не меняется при переходе от одной инерциальной системы отсчёта к другой.
- Ускорение, как отношение силы к массе, также не зависит от выбора инерциальной системы
отсчёта.
В итоге, основное уравнение m∙a = F остаётся неизменным в любой инерциальной системе
отсчёта.
19