


































 Электроника
ЭлектроникаПохожие презентации:



")






Применение наземных автоматических радиопеленгаторов и радиолокаторов
1.
ПРИМЕНЕНИЕ НАЗЕМНЫХАВТОМАТИЧЕСКИХ
РАДИОПЕЛЕНГАТОРОВ И РАДИОЛОКАТОРОВ
Задачи, решаемые с помощью
наземного автоматического радиопеленгатора
Наземный радиопеленгатор – специальное приемное
радиотехническое устройство, позволяющее определять
направление на самолет, на котором работает
передающая радиостанция.
Данные пеленгации наземного радиопеленгатора могут
быть использованы только при наличии двусторонней
связи экипажа самолета с землей.
2.
Дальность пеленгования и точностьопределения пеленга наземными
радиопеленгаторами
3.
задачи самолетовождения:• выполнение полета от радиопеленгатора и
на радиопеленгатор в заданном
направлении;
• определение момента пролета
радиопеленгатора или его траверза;
• контроль пути по дальности и
направлению;
• определение МС и навигационных
элементов полета;
• пробивание облачности и заход на посадку.
4.
Полет от наземного радиопеленгатораможет быть выполнен в том случае, когда
радиопеленгатор расположен в ИПМ, ППМ или
любой другой точке на ЛЗП.
При использовании УКВ радиопеленгаторов
для контроля пути по направлению
запрашивается в телефонном режиме пеленг
от радиопеленгатора на самолет (прямой
пеленг) словами «Дайте прямой пеленг», что
означает: «Сообщите магнитный пеленг от
вас»
5.
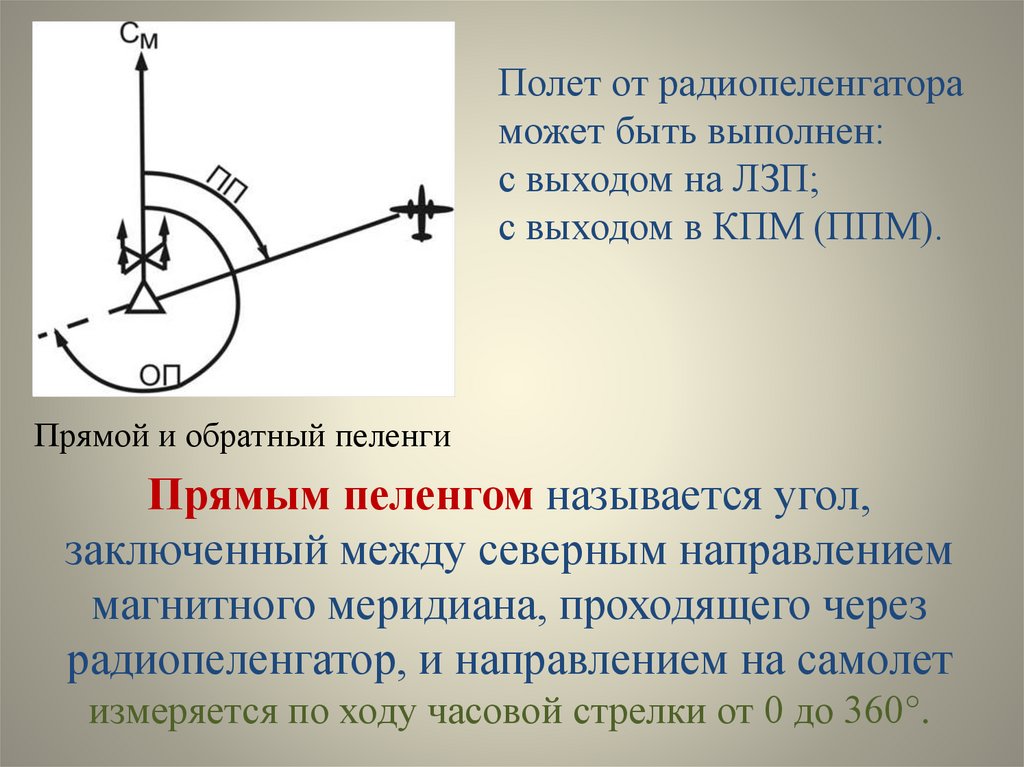
Полет от радиопеленгатораможет быть выполнен:
с выходом на ЛЗП;
с выходом в КПМ (ППМ).
Прямой и обратный пеленги
Прямым пеленгом называется угол,
заключенный между северным направлением
магнитного меридиана, проходящего через
радиопеленгатор, и направлением на самолет
измеряется по ходу часовой стрелки от 0 до 360°.
6.
Контроль пути по направлению при полете отрадиопеленгатора
осуществляется сравнением прямого пеленга с ЗМПУ.
В результате этого сравнения определяется боковое
уклонение самолета от ЛЗП. Если полученный
ПП = ЗМПУ или отличается от него на 1–2°, то самолет
находится на ЛЗП
7.
Контроль пути по направлению при полете от радиопеленгатораесли ПП > ЗМПУ, то самолет находится правее ЛЗП
если ПП < ЗМПУ, то самолет находится левее ЛЗП
БУ и УСф при полете от радиопеленгатора
определяются по формулам
БУ = ПП – ЗМПУ;
УСф = ПП – МКр.
8.
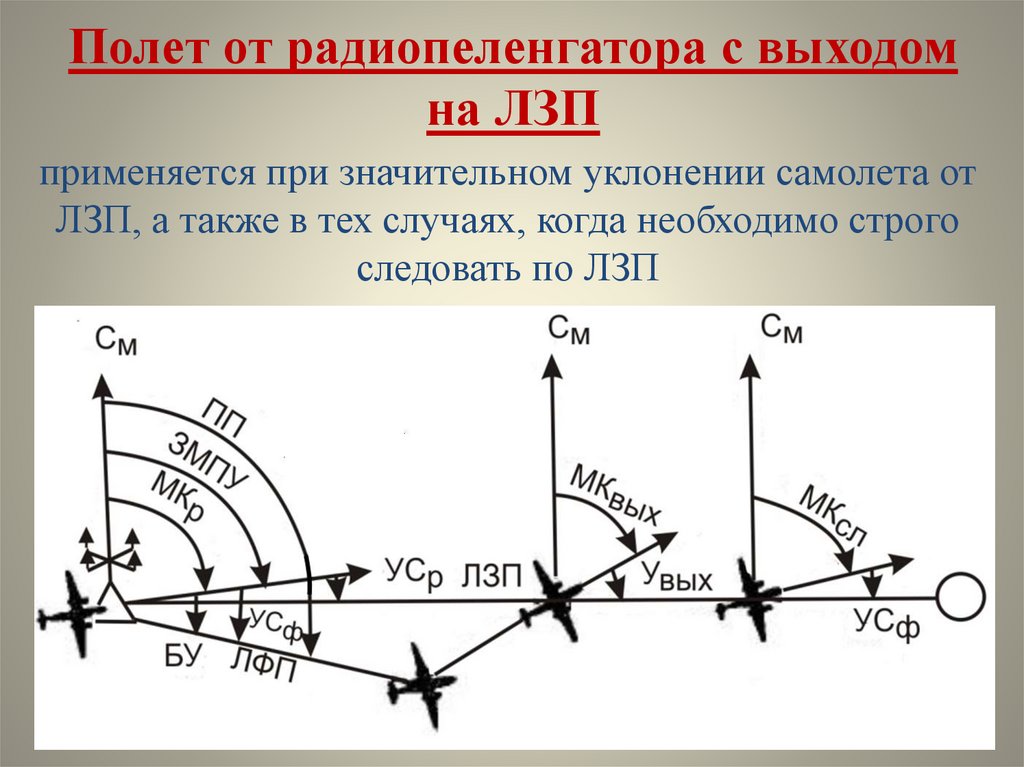
Полет от радиопеленгатора с выходомна ЛЗП
применяется при значительном уклонении самолета от
ЛЗП, а также в тех случаях, когда необходимо строго
следовать по ЛЗП
9.
ПОРЯДОК ВЫХОДА1. Пройти радиопеленгатор с МКр или МК = ЗМПУ.
2. Через 5–15 мин полета запросить прямой пеленг,
сравнить его с ЗМПУ и определить сторону и
величину бокового уклонения:
БУ = ПП – ЗМПУ.
3. Вывести самолет на ЛЗП, для чего задать угол
выхода в пределах 20–90°, определить и установить
самолет на МКвых: МКвых = ЗМПУ ± Увых.
10.
4. Следуя к ЛЗП, периодически запрашиватьПП и определить момент выхода на ЛЗП по
ППвых = ЗМПУ.
5. После выхода на ЛЗП установить самолет
на курс следования:
МКсл = МКр – (± БУ) или
МКсл = ЗМПУ – (± УСф).
6. Дальнейший контроль пути по
направлению осуществлять периодическим
запросом и сравнением ПП с ЗМПУ
(ППслед = ЗМПУ).
11.
Полет от радиопеленгатора с выходомв КПМ (ППМ)
выполняется, когда уклонение самолета от ЛЗП или
оставшееся расстояние до КПМ (ППМ) мало.
12.
ПОРЯДОК ВЫПОЛНЕНИЯ1. Пройти радиопеленгатор с МКр или
МК = ЗМПУ.
2. Через 5–15 мин полета запросить ПП,
сравнить его с ЗМПУ и определить сторону и
величину бокового уклонения:
БУ = ПП – ЗМПУ.
3. Рассчитать дополнительную поправку и
поправку в курс:
ПК = БУ + ДП.
4. Установить самолет на МК следования в
КПМ (ППМ): МККПМ = МКр – (±ПК).
13.
Полет на наземныйрадиопеленгатор
При использовании УКВ радиопеленгаторов для
контроля пути по направлению обратные
пеленги запрашиваются в телефонном режиме
словами: «Дайте обратный пеленг».
При использовании KB радиопеленгаторов для
контроля пути по направлению пеленги
запрашиваются в телеграфном режиме кодовым
выражением ЩДМ, которое означает:
«Сообщите магнитный курс, с которым я должен
направиться к вам при отсутствии ветра».
14.
Обратном пеленгом называется угол, заключенныймежду северным направлением магнитного меридиана,
проходящего через радиопеленгатор, и направлением
продолжения линии, проложенной от ВС через
радиопеленгатор.
ОП измеряется по ходу часовой стрелки от 0 до 360°.
Обратный пеленг – это измененный на 180° прямой
пеленг.
15.
Полет на радиопеленгатор может быть выполненпассивным и активным способами.
Активный полет на радиопеленгатор может быть
выполнен:
• с выходом на ЛЗП;
• с выходом в КПМ (ППМ);
• с любого направления подбором курса
следования.
16.
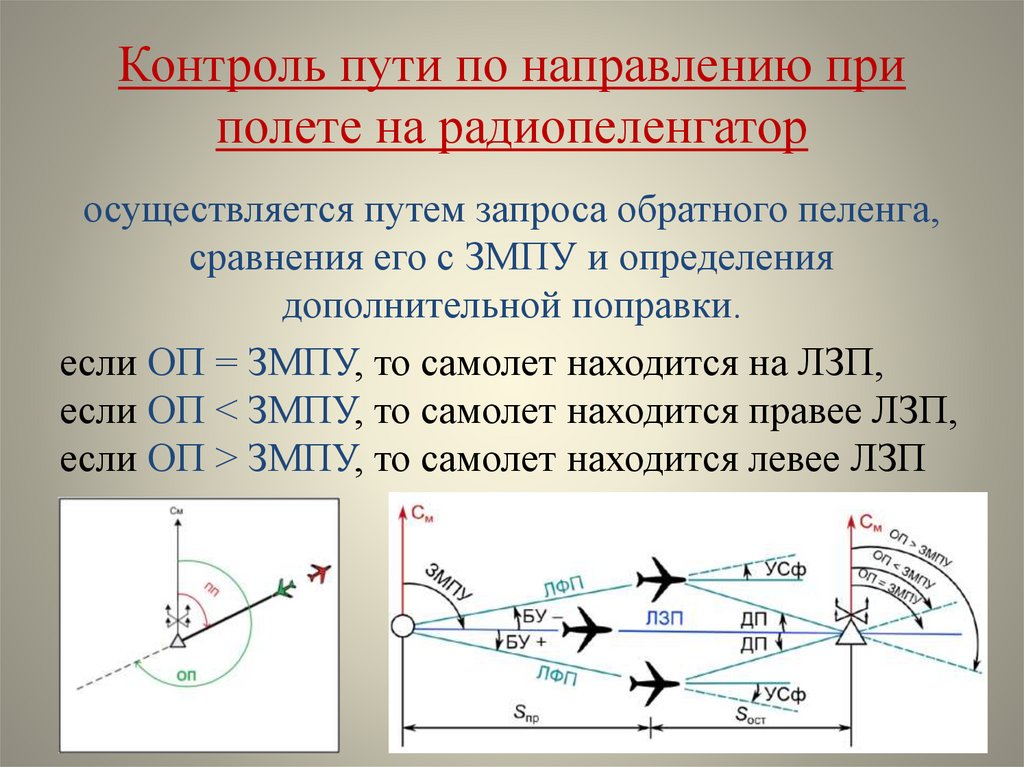
Контроль пути по направлению приполете на радиопеленгатор
осуществляется путем запроса обратного пеленга,
сравнения его с ЗМПУ и определения
дополнительной поправки.
если ОП = ЗМПУ, то самолет находится на ЛЗП,
если ОП < ЗМПУ, то самолет находится правее ЛЗП,
если ОП > ЗМПУ, то самолет находится левее ЛЗП
17.
ДП = ЗМПУ – ОП.S ост
ДП.
БУ =
S
пр
УСф = (±УСр) + (±БУ).
18.
Полет на радиопеленгатор с выходом наЛЗП
Порядок выполнения полета
1. Пройти ИПМ (ППМ) с МКр или МК = ЗМПУ.
2. Через 5–15 мин полета запросить у диспетчера ОП
(ЩДМ), сравнить его с ЗМПУ, определить сторону
уклонения, величину дополнительной поправки и
бокового уклонения:
S ост
ДП = ЗМПУ – ОП; БУ = ДП.
S
пр
3. Задать угол выхода в пределах 20–90°, рассчитать
МКвых и вывести самолет на ЛЗП.
МКвых = ЗМПУ ± Увых.
19.
4. Следуя с МКвых, периодически запрашивать ОП и определитьмомент выхода на ЛЗП по
ОПвых = ЗМПУ.
5. После выхода на ЛЗП установить самолет на МК следования:
МКсл = МКр – (±БУ) или МКсл = ЗМПУ – (±УСФ).
6. В дальнейшем осуществлять контроль пути по направлению
периодическим запросом ОП и сравнением их с ЗМПУ:
ОПсл = ЗМПУ.
20.
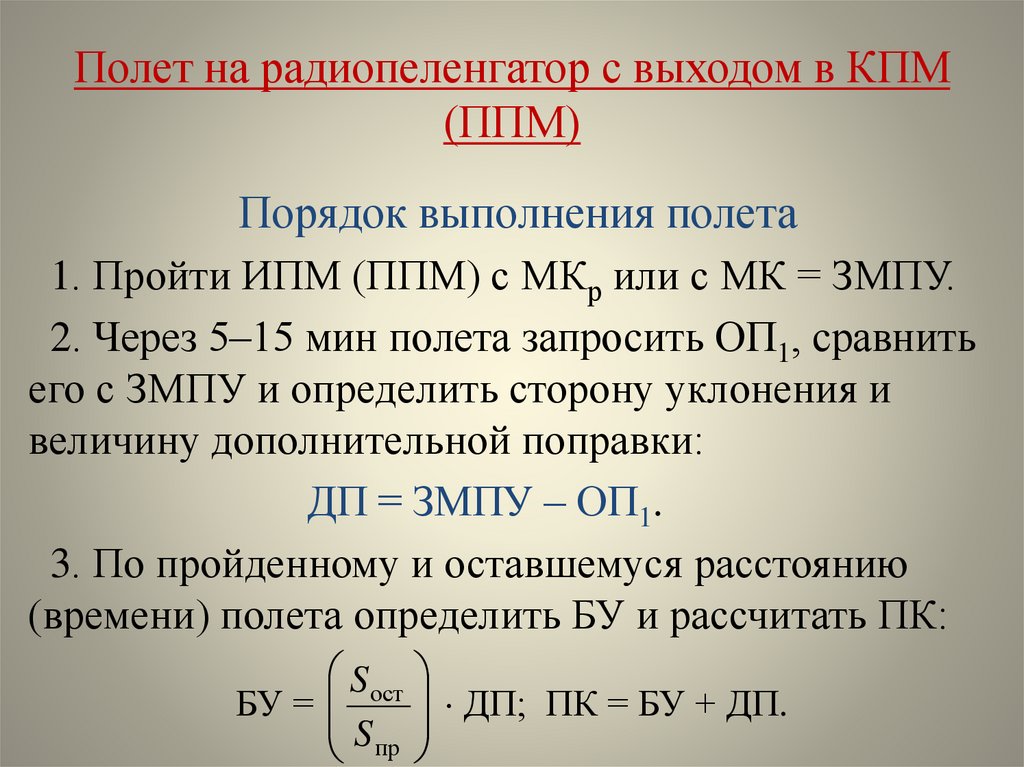
Полет на радиопеленгатор с выходом в КПМ(ППМ)
Порядок выполнения полета
1. Пройти ИПМ (ППМ) с МКр или с МК = ЗМПУ.
2. Через 5–15 мин полета запросить ОП1, сравнить
его с ЗМПУ и определить сторону уклонения и
величину дополнительной поправки:
ДП = ЗМПУ – ОП1.
3. По пройденному и оставшемуся расстоянию
(времени) полета определить БУ и рассчитать ПК:
S ост
ДП; ПК = БУ + ДП.
БУ =
S
пр
21.
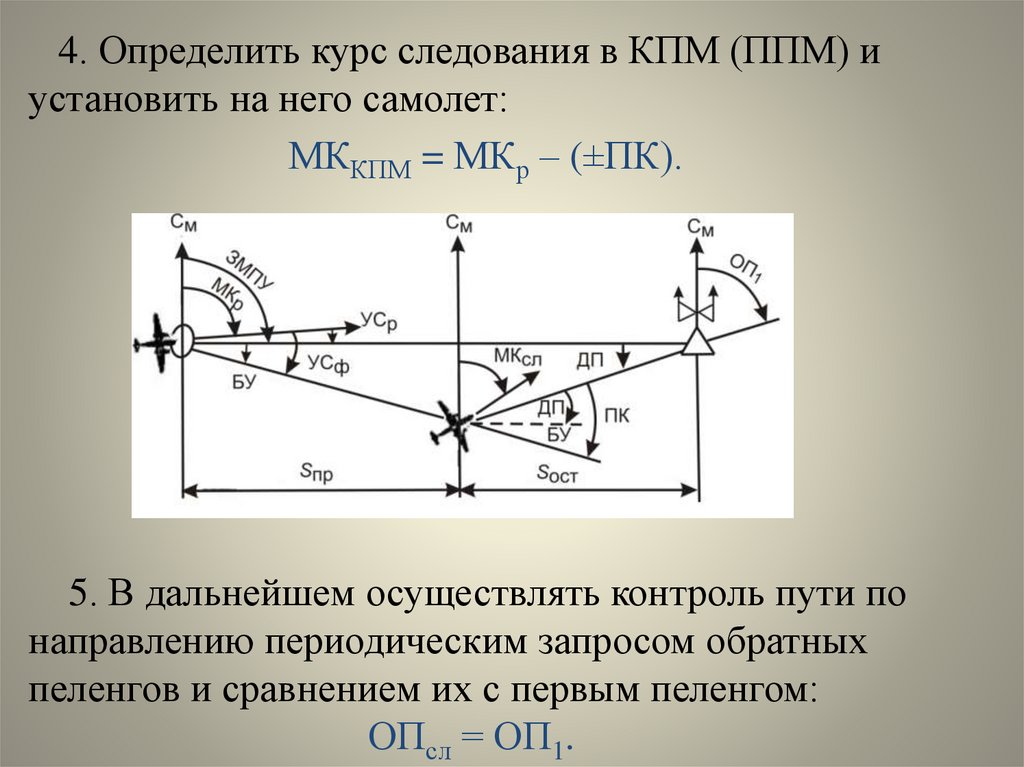
4. Определить курс следования в КПМ (ППМ) иустановить на него самолет:
МККПМ = МКр – (±ПК).
5. В дальнейшем осуществлять контроль пути по
направлению периодическим запросом обратных
пеленгов и сравнением их с первым пеленгом:
ОПсл = ОП1.
22.
Полет на радиопеленгатор с любогонаправления подбором курса следования
применяется при выходе на радиопеленгатор после
обхода зон грозовой деятельности, при восстановлении
потерянной ориентировки, когда отсутствуют данные о
ветре
23.
1. Установить связь с диспетчером, запроситьобратный пеленг, установить самолет на MK1–ОП1
заметить курс и продолжать полет с этим курсом.
2. Через 3–5 мин полета запросить ОП2, сравнить
его с ОП1 и определить сторону сноса самолета.
Если ОП2 = ОП1 или отличается от него на 1–2°, то
считается, что курс на радиопеленгатор подобран и
MK1 можно принять за МКсл;
если ОП2 > ОП1, то самолет сносится влево,
если ОП2 < ОП1, то самолет сносится вправо.
3. При изменении пеленга более чем на 2°
установить самолет на курс следования с учетом
предполагаемого сноса:
МК2 = ОП2 – (±5°).
24.
Обычно первую поправку на снос берут равной 5 ,вторую 8 , третью 10°.
4. Через 3–5 мин запросить ОП3, сравнить его с ОП2 и
проверить правильность взятого упреждения на снос.
Если пеленг изменяется в прежнюю сторону, то
поправку на снос необходимо увеличить, т. е.
МК3 = ОП3 – (±8°).
Курс считается подобранным, если каждый
последующий пеленг равен предыдущему или
отличается от него на 1–2°.
Если обратные пеленги начинают изменяться в другую
сторону, то это значит, что упреждение на снос было
взято слишком большое. В этом случае необходимо
установить самолет на МК средний между последними
двумя МК.
25.
Определение момента пролетарадиопеленгатора или его траверза
выполняется в конце полета самолета на
радиопеленгатор пассивным или активным способом.
Контроль за приближением к радиопеленгатору
осуществляется:
• по расчетному времени прибытия на радиопеленгатор;
• по резкому изменению обратных пеленгов.
Момент пролета радиопеленгатора определяется:
• по изменению обратного пеленга на величину,
близкую к 180°;
• по команде «Пролет», передаваемой с земли.
26.
Истинный пеленг и взаимозависимостьпеленгов
• Для контроля пути по дальности и
определения места самолета запрашиваются
истинные пеленги словами: «Дайте истинный
пеленг».
• Истинным пеленгом называется угол,
заключенный между северным направлением
истинного меридиана, проходящего через
радиопеленгатор, и направлением на самолет.
Истинный пеленг отсчитывается по ходу
часовой стрелки от 0 до 360°.
27.
Между прямым, истинным и обратным пеленгамисуществует следующая взаимозависимость:
ИП = ПП + (± Δм);
ПП = ИП — (±Δм);
ОП = ПП ± 180°.
ПП = ОП ± 180°.
28.
Задачи, решаемые с помощьюназемного радиолокатора
предназначены для контроля за движением самолетов и
для решения задач самолетовождения.
Наземные радиолокаторы с индикаторами кругового
обзора позволяют службе движения:
• обнаруживать ВС в контролируемом районе и
определять их место;
• контролировать выдерживание экипажем
установленного маршрута и точность выдерживания
полета по расписанию;
29.
• предупреждать опасные сближения ВС иконтролировать установленные интервалы между
ними;
• обнаруживать районы очагов грузовой деятельности,
определять направление и скорость их перемещения и
передавать экипажам указания для обхода этих очагов;
• оказывать помощь экипажам при полетах в особых
случаях (отказе в работе радиотехнических средств,
потере ориентировки и др.) путем передачи экипажу
указаний по дальнейшему полету и выводу самолета
на аэродром.
30.
Наземные радиолокаторы позволяют решать следующиезадачи самолетовождения:
• определять и сообщать экипажу место самолета;
• осуществлять контроль за полетом по заданному
маршруту;
• выводить самолет в заданный район или на аэродром
посадки;
• определять навигационные элементы полета
(ФМПУ, УС, путевую скорость).
Применяемые в гражданской авиации радиолокаторы с
индикатором кругового обзора позволяют определять
азимут самолета и наклонную дальность. Дальность их
действия зависит от высоты полета и типа самолета.
Для высот от 1000 до 11 000 м она составляет
80–350 км.
31.
Определение места воздушного суднаи путевой скорости
Место ВС при помощи РЛС определяется по
запросу экипажа или по усмотрению диспетчера
в следующем порядке:
1. Запросить у диспетчера место самолета.
2. Получить от диспетчера азимут и дальность
от РЛС до самолета.
3. Отложить на карте от РЛС полученный
азимут и дальность на линии азимута.
Полученная точка будет местом самолета к
моменту запроса. Точность определения места
самолета по данным РЛС составляет 1–3 км.
32.
При полете от радиолокатора и на радиолокаторпутевая скорость
определяется в следующем порядке:
1. Запросить у диспетчера место самолета и заметить время.
2. Через 7–10 мин полета снова запросить место самолета и
заметить время.
3. Определить пройденный ВС путь как разность между
полученными дальностями:
Sпр = Д2 – Д1 или Sпр = Д1 – Д2.
4. По пройденному расстоянию и времени полета рассчитать
с помощью НЛ-10М путевую скорость.
33.
При полете в произвольном направлениипутевая скорость определяется в следующем
порядке:
1. Запросить у диспетчера место ВС, заметить
время и нанести на карту отметку места
самолета.
2. Через 7–10 мин снова запросить у диспетчера
место ВС, заметить время и нанести на карту
вторую отметку места самолета.
3. Измерить на карте расстояние между
отметками места самолета и рассчитать путевую
скорость.
34.
Контроль и исправление пути при полетеот и на радиолокационную станцию
При полете от РЛС контроль и исправление пути
осуществляется в следующем порядке:
1. Запросить у диспетчера место самолета.
2. Перевести полученный азимут в МПС, сравнить
его с ЗМПУ и определить боковое уклонение:
МПС = А – (± Δм);
БУ = МПС – ЗМПУ.
3. При значительном боковом уклонении задать
угол выхода, определить и взять курс для выхода на
ЛЗП:
МКвых = ЗМПУ ± Увых.
35.
4. Определить момент выхода на ЛЗП по азимуту ивзять курс следования:
Авых = ЗМПУ + (± Δм); МКсл = МКр – (±БУ)
или
МКсл = ЗМПУ – (± УСф); УСф = МПС – МКр.
5. При незначительном уклонении от ЛЗП рассчитать
поправку в курс и взять курс для следования в КПМ
(ППМ):
ПК = БУ + ДП; МККПМ = МКр – (± ПК).
36.
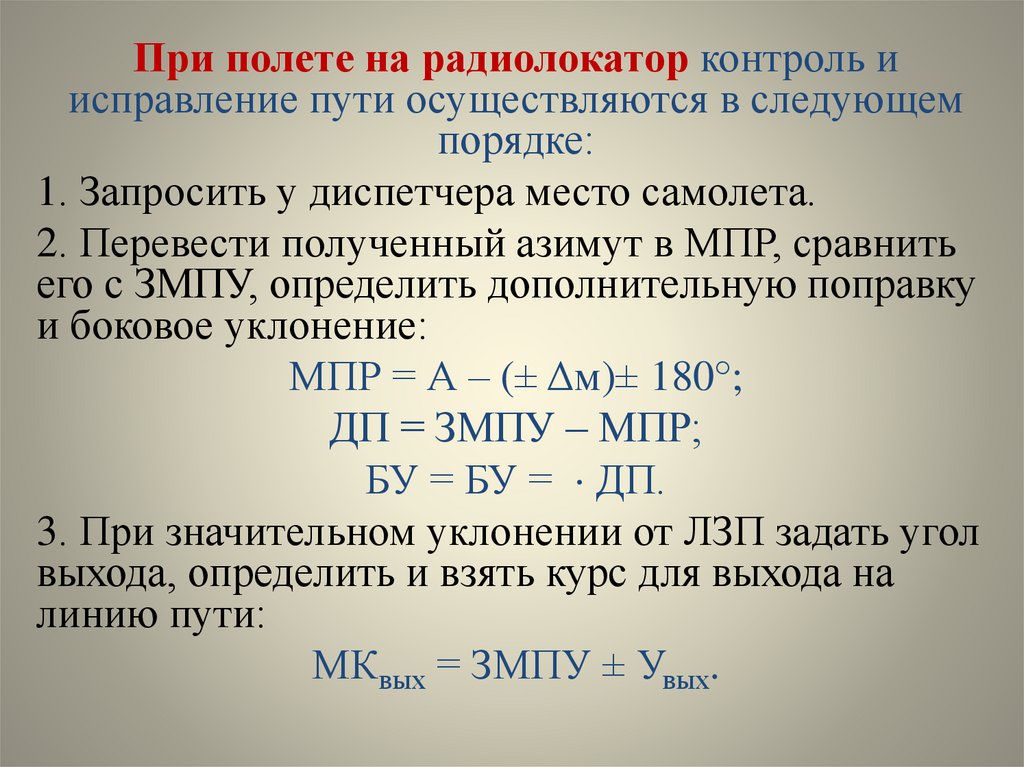
При полете на радиолокатор контроль иисправление пути осуществляются в следующем
порядке:
1. Запросить у диспетчера место самолета.
2. Перевести полученный азимут в МПР, сравнить его
с ЗМПУ, определить дополнительную поправку и
боковое уклонение:
МПР = А – (± Δм)± 180°;
ДП = ЗМПУ – МПР;
S ост
ДП.
БУ = БУ =
S
пр
37.
3. При значительном уклонении от ЛЗП задать уголвыхода, определить и взять курс для выхода на
линию пути:
МКвых = ЗМПУ ± Увых.
4. Определить момент выхода на ЛЗП по азимуту и
взять курс следования:
Авых = ЗМПУ + (±Δм) ± 180°;
МКсл = МКр – (±БУ)
или
МКсл = ЗМПУ – (± УСФ);
УСФ = (±УСр) + (±БУ).
5. При незначительном уклонении от ЛЗП
рассчитать поправку в курс и взять курс для
следования в КПМ (ППМ):
ПК = БУ + ДП; МККПМ = МКр – (± ПК).
38.
Задачи, решаемые с помощьюназемного радиолокатора
Наземные радиолокаторы относятся к
смешанным автономным радиотехническим
средствам и представляют собой
приемопередающие радиотехнические
устройства, работающие в импульсном режиме в
сантиметровом или метровом диапазоне волн.
Предназначены для контроля за движением
самолетов и для решения задач
самолетовождения.
39.
Наземные радиолокаторы с индикаторамикругового обзора позволяют службе движения:
• обнаруживать ВС в контролируемом районе и
определять их место;
• контролировать выдерживание экипажем
установленного маршрута и точность выдерживания
полета по расписанию;
• предупреждать опасные сближения ВС и
контролировать установленные интервалы между ними;
• обнаруживать районы очагов грузовой деятельности,
определять направление и скорость их перемещения и
передавать экипажам указания для обхода этих очагов;
• оказывать помощь экипажам при полетах в особых
случаях (отказе в работе радиотехнических средств,
потере ориентировки и др.) путем передачи экипажу
указаний по дальнейшему полету и выводу самолета на
аэродром.
40.
Наземные радиолокаторы позволяют решатьследующие задачи самолетовождения:
• определять и сообщать экипажу место
самолета;
• осуществлять контроль за полетом по
заданному маршруту;
• выводить самолет в заданный район или на
аэродром посадки;
• определять навигационные элементы полета
(ФМПУ, УС, путевую скорость).
41.
Применяемые в гражданской авиациирадиолокаторы с индикатором кругового обзора
позволяют определять азимут самолета и
наклонную дальность.
Дальность их действия зависит от высоты
полета и типа самолета.
для высот от 1000 до 11 000 м она составляет
80–350 км.
42.
Определение места воздушного судна ипутевой скорости
Место ВС при помощи РЛС определяется по
запросу экипажа или по усмотрению диспетчера в
следующем порядке:
1. Запросить у диспетчера место самолета.
2. Получить от диспетчера азимут и дальность от
РЛС до самолета.
3. Отложить на карте от РЛС полученный азимут и
дальность на линии азимута.
Полученная точка будет местом самолета к
моменту запроса. Точность определения места
самолета по данным РЛС составляет 1–3 км.
43.
При полете от радиолокатора и нарадиолокатор путевая скорость определяется
в следующем порядке:
1. Запросить у диспетчера место самолета и
заметить время.
2. Через 7–10 мин полета снова запросить место
самолета и заметить время.
3. Определить пройденный ВС путь как
разность между полученными дальностями:
Sпр = Д2 – Д1 или Sпр = Д1 – Д2.
• 4. По пройденному расстоянию и времени
полета рассчитать с помощью НЛ-10М
путевую скорость.
44.
При полете в произвольном направлениипутевая скорость определяется в следующем
порядке:
1. Запросить у диспетчера место ВС, заметить
время и нанести на карту отметку места
самолета.
2. Через 7–10 мин снова запросить у
диспетчера место ВС, заметить время и
нанести на карту вторую отметку места
самолета.
3. Измерить на карте расстояние между
отметками места самолета и рассчитать
путевую скорость.
45.
Контроль и исправление пути при полетеот и на радиолокационную станцию
Наземные радиолокаторы позволяют вести
контроль пути по направлению.
При полете от РЛС контроль и исправление
пути осуществляется в следующем порядке:
1. Запросить у диспетчера место самолета.
2. Перевести полученный азимут в МПС,
сравнить его с ЗМПУ и определить боковое
уклонение:
МПС = А – (± Δм);
БУ = МПС – ЗМПУ.
46.
3. При значительном боковом уклонении задатьугол выхода, определить и взять курс для
выхода на ЛЗП:
МКвых = ЗМПУ ± Увых.
4. Определить момент выхода на ЛЗП по
азимуту и взять курс следования:
Авых = ЗМПУ + (± Δм); МКсл = МКр – (±БУ)
или
МКсл = ЗМПУ – (± УСф); УСф = МПС – МКр.
5. При незначительном уклонении от ЛЗП
рассчитать поправку в курс и взять курс для
следования в КПМ (ППМ):
ПК = БУ + ДП; МККПМ = МКр – (± ПК).
47.
При полете на радиолокатор контроль иисправление пути осуществляются в следующем
порядке:
1. Запросить у диспетчера место самолета.
2. Перевести полученный азимут в МПР, сравнить
его с ЗМПУ, определить дополнительную поправку
и боковое уклонение:
МПР = А – (± Δм)± 180°;
ДП = ЗМПУ – МПР;
БУ = БУ = ДП.
3. При значительном уклонении от ЛЗП задать угол
выхода, определить и взять курс для выхода на
линию пути:
МКвых = ЗМПУ ± Увых.
48.
4. Определить момент выхода на ЛЗП поазимуту и взять курс следования:
Авых = ЗМПУ + (±Δм) ± 180°;
МКсл = МКр – (±БУ)
или
МКсл = ЗМПУ – (± УСФ);
УСФ = (±УСр) + (±БУ).
5. При незначительном уклонении от ЛЗП
рассчитать поправку в курс и взять курс для
следования в КПМ (ППМ):
ПК = БУ + ДП; МККПМ = МКр – (± ПК).